Изобретение относится к измерительной технике и может быть использовано для измерения углового перемещения вала, например рулевого вала, в системе управления электромеханическим усилителем руля автомобиля.
Известна конструкция датчика угловых перемещений, см. авторское свидетельство SU 1315791, МКИ 4 G 01 B 7/30, публ. 07.06.87 г., бюл. 21. Датчик содержит статор, выполненный в виде пустотелого цилиндра с растровыми окнами, и установленный коаксиально с ним ферромагнитный ротор с растровыми окнами, сдвинутыми одно относительно другого на 180o. На статоре размещены две измерительные обмотки. При изменении углового положения ротора изменяется соотношение величин индуктивности его измерительных обмоток, по которому определяют величину и направление углового перемещения. Недостатком датчика является возможность определения угла поворота в пределах одного оборота ротора.
За прототип заявляемого изобретения взят многооборотный датчик угловых перемещений, авторское свидетельство SU 1227947, МКИ4 G01B 7/30, публ. 30.04.86 г., бюл. 16. Датчик содержит корпус, выполненный в виде пустотелого цилиндра, внутренняя поверхность которого снабжена гайкой, и размещенные в корпусе соосно статор, выполненный в виде стержня из ферромагнитного материала, на поверхности которого в продольных канавках размещены одна обмотка возбуждения и две обмотки считывания, и подвижный ферромагнитный элемент, выполненный в виде цилиндра, на внешней поверхности которого выполнены зубцы в виде резьбы. Подвижный элемент связан с контролируемым валом. Зубцы подвижного ферромагнитного элемента входят в винтовое зацепление с резьбой гайки корпуса. При вращении контролируемого вала происходит линейное перемещение подвижного элемента относительно статора с размещенными на нем обмотками, которое обуславливает изменение потокосцепления обмоток, а следовательно, и изменение выходного сигнала датчика в функции углового перемещения контролируемого вала.
Недостатком прототипа является сложность конструкции многооборотного датчика угловых перемещений.
Задачей заявляемого изобретения является создание многооборотного датчика угловых перемещений простой и технологичной конструкции.
Указанная задача решается в многооборотном датчике угловых перемещений, включающем в себя корпус, в отверстии которого размещены две обмотки и установлены соосно статор, ротор, выполненный в виде цилиндрического стержня, и резьбовой подвижный элемент, выполненный с возможностью перемещения вдоль оси ротора.
Задача решается тем, что ротор снабжен резьбовым участком, статор выполнен в виде полого цилиндра, в стенках которого сформированы по меньшей мере две продольные прорези, равномерно распределенные относительно поверхности статора, резьбовой подвижный элемент выполнен в виде цилиндра с резьбовым отверстием и шлицами, сформированными на внешней поверхности резьбового подвижного элемента, причем количество шлицов соответствует количеству прорезей, резьбовой подвижный элемент установлен внутри статора так, что его шлицы размещены в прорезях статора, датчик снабжен каркасом из диэлектрического материала, охватывающим статор, в каркасе выполнены два кольцевых паза, а обмотки размещены в кольцевых пазах каркаса в один слой.
При этом корпус датчика может быть образован корпусом объекта, содержащего контролируемый вал, а ротор может быть выполнен заодно с контролируемым валом. В частности, корпус датчика может быть образован кожухом электромеханического усилителя руля, а ротор может быть образован участком рулевого вала, на поверхности которого выполнена резьба.
При этом резьбовой подвижный элемент может быть выполнен наборным из профилированных пластин.
Изобретение поясняется следующими чертежами.
На фиг.1 изображен датчик в сборе, продольный разрез.
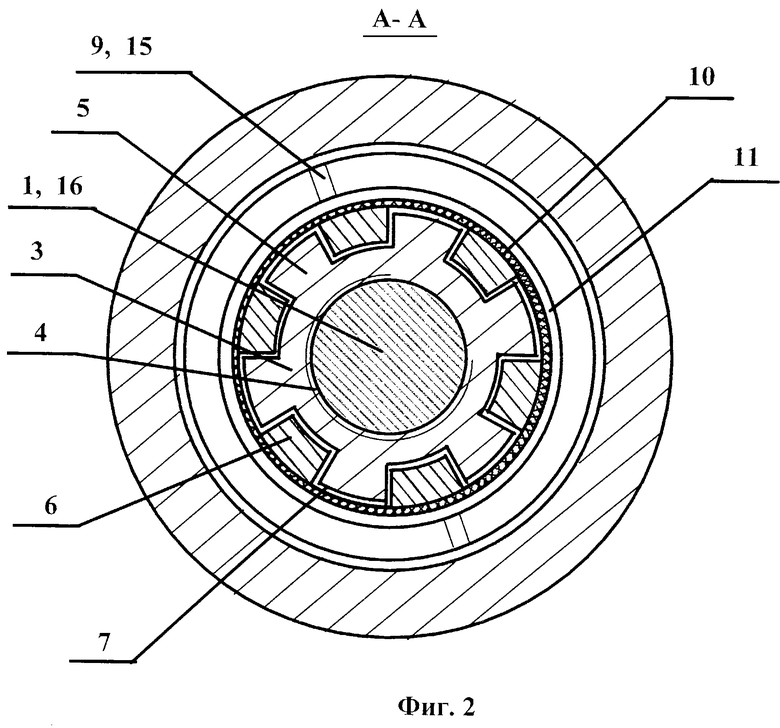
На фиг.2 изображен датчик в сборе, поперечный разрез.
Изобретение может быть реализовано следующим образом.
Ротор 1 датчика (см. Фиг.1, 2) может быть выполнен в виде отдельного стержня или заодно с валом контролируемого изделия. На роторе датчика выполняется резьбовой участок 2. Длина резьбового участка и параметры резьбы выбираются исходя из диаметра ротора и величины углового перемещения (числа оборотов вала контролируемого объекта), подлежащего измерению.
Резьбовой подвижный элемент 3 выполняют из электропроводящего материала, например алюминиевого сплава, бронзы или латуни, в виде цилиндра с резьбовым отверстием 4. Диаметр отверстия 4 элемента 3 и параметры резьбы выбираются соответствующими диаметру резьбового участка и параметрам резьбы резьбового участка ротора 1. На внешней поверхности резьбового подвижного элемента формируют шлицы 5.
Статор 6 датчика представляет собой полый цилиндр из электропроводящего материала, в стенке которого сформированы равноотстоящие друг от друга продольные прорези 7. В прорези 7 входят шлицы 5 резьбового подвижного элемента 3, что исключает вращение резьбового подвижного элемента 3 при угловом перемещении ротора 1 и обеспечивает возможность поступательного перемещения резьбового подвижного элемента 3 вдоль оси датчика. На одном из торцов статора может быть выполнен фланец 8 с прорезями 9 для крепления каркаса 10 на статоре 6. Каркас 10 для обмоток 11,12 датчика выполняют литьем из диэлектрического материала. На поверхности каркаса 10 формируют два одинаковых кольцевых паза 13, 14 прямоугольного сечения. Глубина пазов 13,14 больше или равна диаметру применяемого для выполнения обмоток проводника. Внутренний диаметр каркаса 10 выбирают немного большим диаметра окружности, описывающей вершины выступов 5 резьбового подвижного элемента 3, для обеспечения перемещения элемента 3 вблизи обмоток.
В пазы каркаса укладывают обмотки 11, 12. Для достижения высокой повторяемости параметров обмоток они выполняются из одинакового провода в один слой с равным числом витков. Каркас 10 с обмотками 11, 12 одевают на статор 6 и фиксируют на фланце 8 статора 6 с помощью продольных выступов 15, выполненных на торце каркаса.
Ротор 1 датчика в данном случае выполнен заодно с контролируемым валом 16 корпуса объекта 17, а датчик размещен в отверстии 18 объекта 17 и закрыт крышкой 19. На резьбовой участок 2 ротора 1 навинчен резьбовой подвижный элемент 3. Статор 6 одет на резьбовой подвижный элемент 3. К статору 6 прикреплен каркас 10 с обмотками 11, 12. Крышка 19 обеспечивает неподвижность статора 3 и каркаса 10.
Обмотки 11, 12 включают в мостовую измерительную цепь переменного тока.
Датчик работает следующим образом.
В нейтральном (исходном) положении контролируемого вала 16 резьбовой подвижный элемент 3 установлен относительно обмоток 11, 12 таким образом, что индуктивности обмоток 11, 12 одинаковы и мостовая измерительная цепь переменного тока находится в состоянии баланса. При вращении вала 16 резьбовой подвижный элемент 3 изменяет свое положение относительно обмоток 11, 12. Это приводит к изменению индуктивностей обмоток в противоположных направлениях. В результате происходит разбаланс мостовой измерительной цепи переменного тока и генерируется сигнал, величина которого пропорциональна угловому перемещению вала 16.
Благодаря этому возможно определение направления и величины углового перемещения. Наличие преобразователя углового перемещения в поступательное позволяет расширить диапазон измерения углового перемещения до нескольких оборотов.
Как показали проведенные авторами исследования, минимальное количество прорезей 7 на статоре 6 и шлицов 5 на подвижном элементе 3, с точки зрения обеспечения требуемой точности измерения величины углового перемещения, равно шести. При достаточно большом диаметре контролируемого вала возможно выполнение датчика с большим количеством прорезей/шлицов. Оптимальной формой поперечного сечения выступов резьбового подвижного элемента с точки зрения минимальных трудовых затрат является трапециевидная форма. С целью повышения технологичности конструкции датчика возможно выполнение резьбового подвижного элемента наборным из пластин требуемого профиля с последующим соединением пластин, например, с помощью заклепок.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГООБОРОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2199087C2 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2191347C2 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2002 |
|
RU2211439C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2003 |
|
RU2244274C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2181091C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1999 |
|
RU2165076C2 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1998 |
|
RU2152600C1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| ПОГРУЖНОЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 1998 |
|
RU2161852C2 |
Изобретение относится к измерительной технике и предназначено для использования при измерении углового перемещения вала, например рулевого вала, в системе управления электромеханическим усилителем руля автомобиля. Датчик включает в себя корпус, в отверстии которого размещены две обмотки и установлены соосно статор, ротор, выполненный в виде цилиндрического стержня, и резьбовой подвижный элемент, выполненный с возможностью перемещения вдоль оси ротора. На роторе имеется резьбовой участок. Статор выполнен в виде полого цилиндра, в стенках которого сформированы по меньшей мере две продольные прорези, равномерно распределенные относительно поверхности статора. Резьбовой подвижный элемент выполнен в виде цилиндра с отверстием и шлицами, сформированными на внешней поверхности резьбового подвижного элемента. Количество шлицов соответствует количеству прорезей. Резьбовой подвижный элемент установлен внутри статора так, что его шлицы размещены в прорезях статора. Датчик снабжен каркасом из диэлектрического материала, охватывающим статор. В каркасе выполнены два кольцевых паза, а обмотки размещены в кольцевых пазах каркаса в один слой. Предложенный датчик характеризуется простой и технологичной конструкцией. 3 з.п. ф-лы, 2 ил.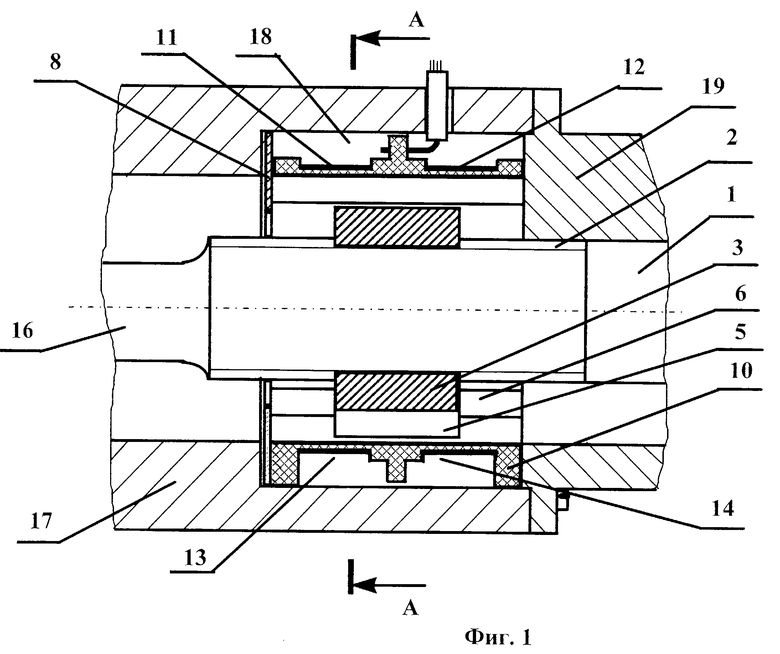
| Датчик перемещений | 1984 |
|
SU1227947A1 |
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| DE 2924094 A1, 08.01.1981. | |||

