Изобретение относится к области контрольной и измерительной техники, а именно к датчикам, регистрирующим пороговые ускорения в различных зонах промышленных агрегатов, а также в боеприпасах различного назначения.
Для работы механизмов, работающих в экстремальных условиях, необходимы датчики ускорений, срабатывающие при достижении определенного порогового значения инерционного ускорения и выключающего (или включающего) тот или иной исполнительный механизм.
Известны датчики пороговых ускорений, близкие по назначению заявляемому изобретению, например устройство по патенту РФ 2164692 (опубликован 27.03.2001) и устройство по авторскому свидетельству СССР 1820335 (опубликовано 07.06.93).
Датчик ударных ускорений по патенту РФ 2164692 принципиально решает ту же задачу, что и данное изобретение, но конструктивное исполнение его достаточно сложно, т.к. он имеет рычажную систему, управляющую контактной группой, с установленными по обе стороны от шарнира двумя инерционными шариками, помещенными в закрепленные на корпусе конические седла, и двумя постоянными магнитами с полюсными наконечниками. Сложность конструктивного решения не позволяет просто решить задачу регулировки порога срабатывания датчика в широких пределах.
Наиболее близким аналогом по назначению и конструкции является датчик пороговых ускорений по авторскому свидетельству СССР 1820335 (заявка 4886437 от 26.11.90), опубликованному 07.06.93 в Бюллетене изобретений 21, выбранный за прототип.
Указанный датчик содержит корпус, внутри которого расположены ферромагнитный шарик с контактной системой, магнитную систему, выполненную в виде трубчатого цилиндрического магнита, расположенного снаружи корпуса, и ферромагнитного регулировочного винта, расположенного внутри корпуса над ферромагнитным шариком. К достоинствам датчика можно отнести малые габариты, простоту конструкции и достаточную устойчивость к внешним помехам.
Однако этот датчик может обеспечить регулировку порога срабатывания только в пределах 15-20% от номинального значения, определяемого параметрами конкретной конструкции, и изменение величины порога срабатывания вдвое и более осуществляется при проектировании путем выбора материала и геометрических размеров магнита. Это объясняется тем, что ферромагнитный регулировочный винт находится на удалении от магнитной системы и влияние его перемещения на изменение силы магнитного притяжения, действующей на шарик, ограничено. Кроме того, датчик имеет одностороннюю диаграмму чувствительности, т.е. срабатывает при действии сил инерции только в одном направлении.
Предлагаемая конструкция датчика также имеет магнитную систему с ферромагнитным регулировочным винтом и контактную систему, но она решает задачу срабатывания датчика от действия сил инерции в двух противоположных направлениях и обеспечивает путем простой регулировки изменение величины порога срабатывания датчика вдвое и более, что позволяет использовать один тип датчика для разных пороговых значений инерционных ускорений. Указанные преимущества достигаются применением двух подвижных якорей, имеющих противоположный ход, и регулировки силы притяжения в самом магнитопроводе датчика.
Задача решается выполнением магнитной системы в виде трубчатого цилиндрического магнита, на торцах которого установлены якоря, имеющие ступенчатую форму тел вращения, при этом в одном из якорей расположен ферромагнитный регулировочный винт с возможностью изменения расстояния между винтом и другим якорем, а контактная система состоит из расположенных против внешних торцов каждого из якорей монтажных колодок с гибкими контактными ламелями. Ламели установлены на монтажных колодках по окружности, четным количеством на каждой колодке от 4-х и более, электрически соединены через одну. На цилиндрические части якорей, входящие внутрь магнита, установлены направляющие втулки из немагнитного материала.
При достижении порога срабатывания один из якорей перемещается под действием импульса сил инерции, а второй якорь перемещается под действием импульса волны механического напряжения, направленного противоположно силам инерции (так называемый "отскок" деталей в соответствии с принципом Гопкинсона), при этом каждый из якорей может иметь различную статическую настройку, что обеспечивается различием в массах якорей или конструктивными особенностями якорей, влияющими на магнитную цепь. Экспериментальные исследования с датчиком предлагаемой конструкции показали, что при использовании магнитного сплава 25Х15КА зависимость силы магнитного притяжения (а следовательно, и пороговой настройки) от расстояния (зазора), обеспечиваемого ферромагнитным регулировочным винтом, носит экспоненциальный характер:
Nx=Noexp(-x/a),
где Nх - величина порогового ускорения при воздушном зазоре х;
No - величина порогового ускорения при отсутствии зазора (при х=0);
a - коэффициент, учитывающий падение порогового ускорения от зазора х.
Коэффициент а для используемого типа магнитной системы составляет 0,2 мм.
Для предлагаемой конструкции датчика эффективный зазор х составляет от 0,05 до 0,3 высоты магнита, что обеспечивает диапазон ускорений от 100 g до 400 g.
На фиг.1 представлена конструктивная схема предлагаемого датчика пороговых ускорений.
На фиг.2 представлен вид на ламели контактной системы со стороны замыкающего их якоря.
Датчик состоит из корпуса 1, в котором помещен трубчатый цилиндрический магнит 2 с установленными на его оба торца якорями 3 и 4, причем в сквозное отверстие якоря 3 ввинчен регулировочный винт 5 из ферромагнитного материала, а напротив якорей установлены монтажные колодки 6 и 7 с контактными ламелями 8. Корпус 1 закрыт снизу крышкой 9, которая фиксирует в корпусе 1 трубчатый цилиндрический магнит 2 и монтажную колодку 6. На крышке 9 показан (как вариант) резьбовой наконечник 10 для крепления датчика на объекте. На цилиндрические части якорей 3 и 4, входящие внутрь магнита 2, для повышения чувствительности и уменьшения трения установлены направляющие втулки 11, изготовленные из неферромагнитного материала. Из неферромагнитного материала изготавливаются также корпус 1 и крышка 9. Контактные ламели 8 выполнены гибкими и установлены на монтажных колодках 6 и 7 вкруговую, как показано на фиг. 2. Число ламелей на каждой монтажной колодке четное, от 4-х и более (в зависимости от размеров датчика), и они соединены через одну с образованием на каждой монтажной колодке одной контактной группы, которые могут быть объединены и выведены на исполнительное устройство.
Работа датчика пороговых ускорений происходит следующим образом.
Ввинчивая или вывинчивая при сборке регулировочный винт 5, установленный в якоре 3, обеспечивают требуемую пороговую настройку датчика.
При воздействии на датчик импульса инерционного ускорения, например, вверх по отношению к расположению датчика на фиг.1 верхний якорь 3 отрывается от магнита 2 и перемещается до упора своим торцом в контактные ламели, что приводит к замыканию электрической цепи и срабатыванию исполнительного устройства.
В случае, если на датчик воздействует импульс волны механического напряжения, произойдет отрыв и перемещение нижнего якоря с аналогичным замыканием электрической цепи исполнительного устройства.
В результате проведенных на предприятии экспериментов получено подтверждение осуществления технического результата. Диапазон пороговой настройки по ускорению составил (100-400) g плюс-минус 20% и по амплитуде механического напряжения - 2-40 МПа плюс-минус 20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик пороговых ускорений | 1990 |
|
SU1820335A1 |
| ВЗРЫВАТЕЛЬ ДЛЯ МАЛОГАБАРИТНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2193748C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2003 |
|
RU2250433C1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2007 |
|
RU2362233C1 |
| МАГНИТНОЕ ПОРОГОВОЕ УСТРОЙСТВО | 2012 |
|
RU2522891C2 |
| КОНТАКТНОЕ ВЗРЫВАТЕЛЬНОЕ УСТРОЙСТВО | 2004 |
|
RU2268457C1 |
| ВЗРЫВАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2219487C1 |
| КОНТАКТНОЕ ВЗРЫВАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМЫХ РАКЕТ | 2001 |
|
RU2186335C1 |
| ДАТЧИК СОУДАРЕНИЯ | 2003 |
|
RU2248577C1 |
| ВКЛЮЧАТЕЛЬ ИНЕРЦИОННЫЙ | 2013 |
|
RU2541510C1 |
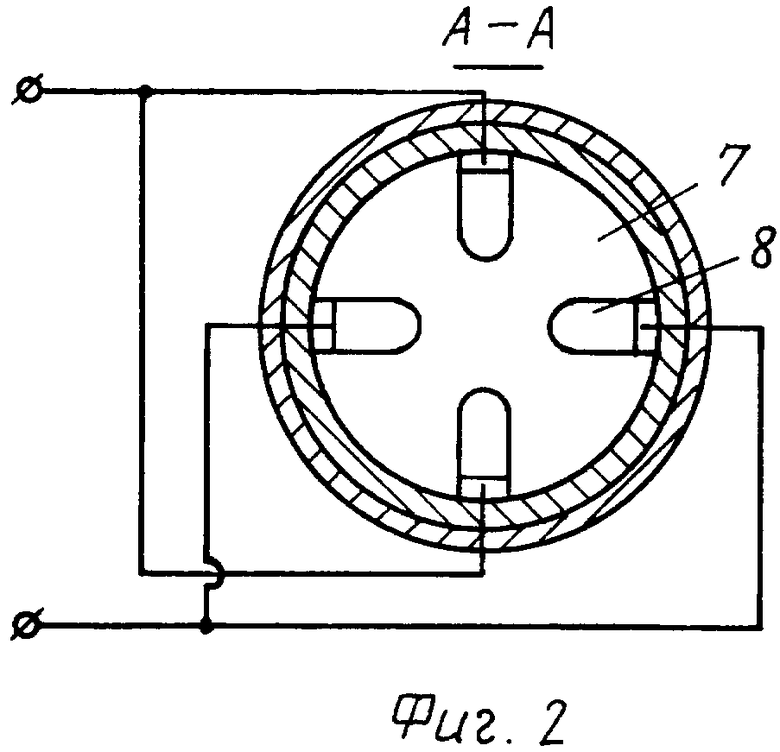
Датчик предназначен для использования в контрольной и измерительной технике для регистрации пороговых ускорений в различных зонах промышленных агрегатов, а также в боеприпасах различного назначения. Датчик имеет магнитную систему с ферромагнитным регулировочным винтом и контактную систему. Магнитная система выполнена в виде трубчатого цилиндрического магнита, на торцах которого установлены якоря, имеющие ступенчатую форму тел вращения. В одном из якорей расположен ферромагнитный регулировочный винт с возможностью изменения расстояния между винтом и другим якорем. Контактная система состоит из расположенных напротив внешних торцов каждого из якорей монтажных колодок с гибкими контактными ламелями. Обеспечивается срабатывание датчика в двух противоположных направлениях, а также простота регулировки порога срабатывания датчика. 2 з.п. ф-лы, 2 ил.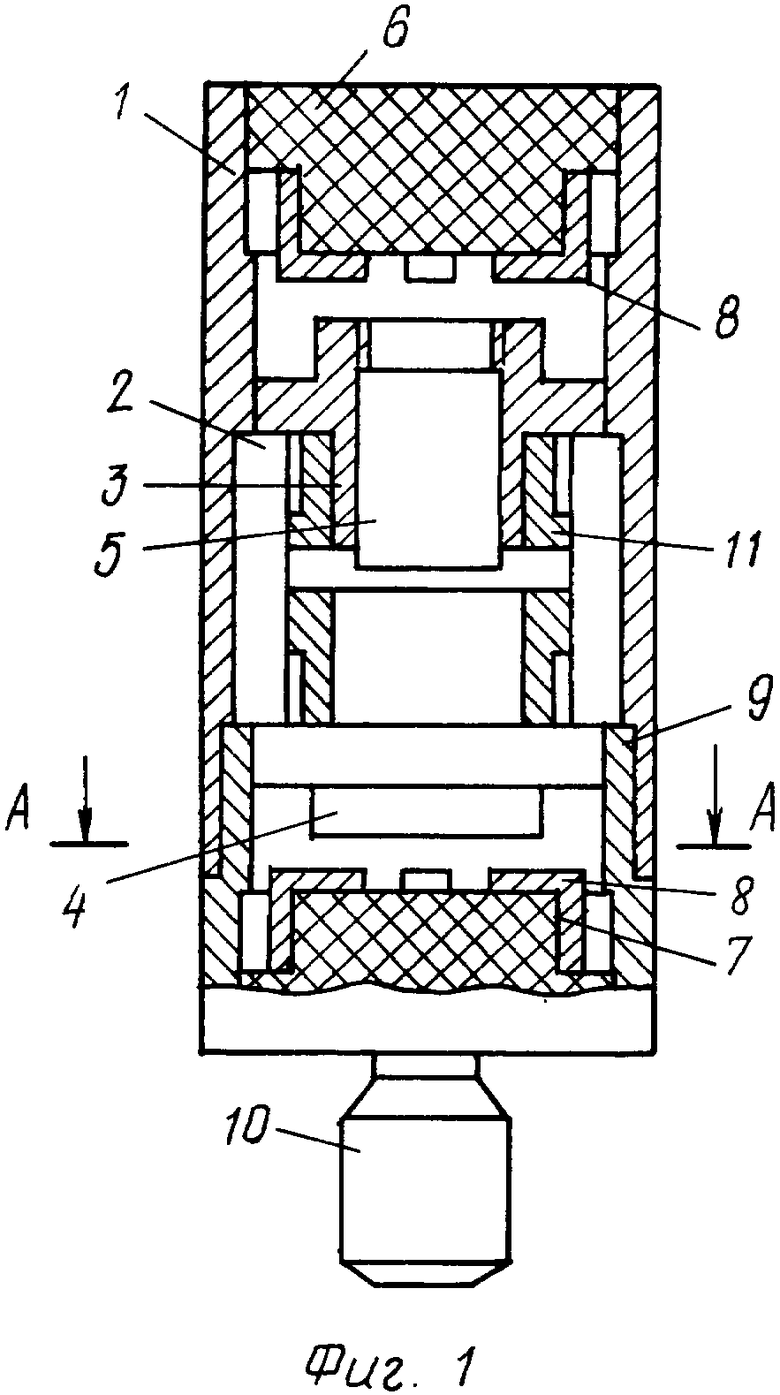
| Датчик пороговых ускорений | 1990 |
|
SU1820335A1 |
| ДАТЧИК МАКСИМАЛЬНОГО УСКОРЕНИЯ | 1995 |
|
RU2107920C1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1996 |
|
RU2130665C1 |
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |

