Изобретение относится к области контроля параметров движения, а именно к пороговым преобразователям механической энергии удара при столкновении автомобиля с препятствием в электрический сигнал для инициирования автомобильных систем пассивной безопасности водителя и пассажиров.
Для защиты пользователей транспортных средств от травм при наездах на препятствия и столкновениях в современных автомобилях применяют системы пассивной безопасности (СПБ), в которых с помощью пирогазогенераторов наполняются удерживающие (амортизирующие) устройства: надувные подушки, гибкие оградительные оболочки, защитные экраны, самозатягивающиеся ремни безопасности и др. Срабатывание СПБ должно осуществляться по сигналу от одного или нескольких датчиков соударения (датчиков столкновения), порог срабатывания которых выбирается равным части ударного ускорения, возникающего при аварийном наезде автомобиля на препятствие.
Известно устройство воспламенения электрозапала защитной удерживающей системы пассивной безопасности /1/. В корпусе данного устройства размещены ударник, удерживаемый постоянным магнитом, и импульсный источник тока в виде пьезоэлектрического преобразователя. При столкновении автомобиля с препятствием при определенной перегрузке ударник отрывается от постоянного магнита, преодолевает межконтактный зазор и соударяется с наковальней пьезоэлектрического преобразователя. После прекращения удара ударник возвращается пружиной в исходное положение.
Однако такое устройство обладает существенным недостатком: относительно малым диапазоном угла срабатывания устройства, поскольку при боковых соударениях ударника его механическая энергия будет рассеиваться на трение и на возбуждение колебаний корпуса. К тому же при боковых ударах ударник может заклинить, что приведет к несрабатыванию СПБ.
Наиболее близким к изобретению по технической сущности является датчик соударения для автомобильных систем аварийной защиты /2/, содержащий размещенную в корпусе упругую систему, состоящую из поджатого с помощью пружины ударника, выполненного в виде последовательно соединенных инерционного элемента, пьезоэлемента и бойка и установленного с возможностью перемещения в сторону основания с вогнутой поверхностью. Данная конструкция обладает более широким диапазоном угла срабатывания за счет возможности разворота ударника в направлении действующего ускорения, вогнутой поверхности основания и условий соударения ударника с основанием (больше площадь контакта и сила взаимодействия между ними). Причем при боковых ударах в определенном диапазоне углов амплитуда выходного сигнала остается такой же, как и при осевом ударе, поскольку вектор силы взаимодействия между ударником и основанием совпадает с осью чувствительности.
Однако виброустойчивость такой маятниковой конструкции при тряске и вибрациях, действующих перпендикулярно оси чувствительности датчика, относительно низка. Качание ударника из стороны в сторону при интенсивной транспортной вибрации, тряске и наезде на относительно небольшие препятствия (колодцы, бордюры и т.п.) способствует снижению порога срабатывания, что может привести к ложным срабатываниям.
Задача, решаемая изобретением, направлена на создание датчика соударения, предназначенного для выдачи электрического сигнала при аварийной ситуации для инициирования автомобильной системы пассивной безопасности водителя и пассажиров.
Техническим результатом настоящего изобретения является повышение устойчивости к транспортной вибрации и дорожным ударам и снижение вероятности ложного срабатывания. Дополнительными техническими результатами являются повышение технологичности конструкции, повышение безотказности и долговечности работы, повышение надежности срабатывания, повышение помехоустойчивости и упрощение конструкции.
Технический результат достигается тем, что в известном датчике соударения, содержащем размещенную в корпусе упругую систему, состоящую из поджатого с помощью пружины ударника, выполненного в виде последовательно соединенных инерционного элемента, пьезоэлемента и бойка и установленного с возможностью перемещения в сторону основания с вогнутой поверхностью, новым является то, что в упругую систему дополнительно введен упругий элемент, ось симметрии которого пересекается с продольной осью ударника, упругий элемент соединен с одной стороны с корпусом, а с другой стороны - с инерционным элементом, вогнутая поверхность основания выполнена цилиндрической, ось симметрии которой расположена в плоскости перемещения оси симметрии упругого элемента, а конструктивные параметры упругой системы выбраны из неравенств  <
< <
< и ε<Δ<
и ε<Δ< , где
, где  - жесткость пружины в продольном направлении;
- жесткость пружины в продольном направлении;  - жесткость упругого элемента в поперечном направлении;
- жесткость упругого элемента в поперечном направлении;  - жесткость упругого элемента в продольном направлении, ε - суммарная погрешность отклонения формы бойка и вогнутой поверхности основания, Δ - зазор между бойком и вогнутой поверхностью основания; JΔ - заданное минимальное ускорение срабатывания, М - масса ударника.
- жесткость упругого элемента в продольном направлении, ε - суммарная погрешность отклонения формы бойка и вогнутой поверхности основания, Δ - зазор между бойком и вогнутой поверхностью основания; JΔ - заданное минимальное ускорение срабатывания, М - масса ударника.
Для повышения устойчивости к дорожным ударам, снижения вероятности ложного срабатывания и повышения технологичности конструкции ось симметрии упругого элемента перпендикулярна продольной оси ударника, а ось симметрии вогнутой поверхности основания параллельна оси симметрии упругого элемента.
Для повышения безотказности и долговечности работы упругий элемент выполнен из электропроводного материала и служит выводным электрическим контактом.
Для повышения технологичности и упрощения конструкции упругий элемент выполнен в виде плоской пружины.
Для повышения надежности срабатывания и помехоустойчивости зазор Δ между бойком и вогнутой поверхностью основания выбран из условия 
Для повышения виброустойчивости собственная частота пружины f1 выбрана из условия f1=F·(1±α), где F - собственная частота упругой системы в свободном состоянии, α - эмпирический коэффициент, α=0,001-0,05.
Повышение устойчивости к транспортной вибрации и дорожным ударам и снижение вероятности ложного срабатывания достигается устранением качания ударника и его соударений с основанием путем ограничения поперечных колебаний ударника с помощью дополнительного упругого элемента. Упругий элемент обеспечивает направленность движения ударника к центру вогнутой цилиндрической поверхности основания, ориентированной в направлении действия транспортной вибрации и дорожных ударов. При транспортной вибрации, тряске и наезде на относительно небольшие препятствия на упругую систему действуют инерционные силы, направленные вдоль упругого элемента, т.е. вдоль оси наименьшей податливости ( >
> ). Это позволяет сохранить исходное поджатое состояние ударника. А при аварийном торможении (столкновении автомобиля с препятствием) силы инерции обращены к цилиндрической поверхности основания, в направлении которой ударник испытывает существенно меньшее сопротивление движению. Форма и ориентация вогнутой поверхности основания позволяют также исключить столкновения ударника с основанием при возможных его угловых колебаниях в плоскости перемещения оси симметрии упругого элемента. Одновременно "мягкая" (
). Это позволяет сохранить исходное поджатое состояние ударника. А при аварийном торможении (столкновении автомобиля с препятствием) силы инерции обращены к цилиндрической поверхности основания, в направлении которой ударник испытывает существенно меньшее сопротивление движению. Форма и ориентация вогнутой поверхности основания позволяют также исключить столкновения ударника с основанием при возможных его угловых колебаниях в плоскости перемещения оси симметрии упругого элемента. Одновременно "мягкая" ( <
< ) пружина способствует гашению резонанса (срыву или уменьшению амплитуды резонансных колебаний) упругой системы.
) пружина способствует гашению резонанса (срыву или уменьшению амплитуды резонансных колебаний) упругой системы.
Выбор зазора между бойком и вогнутой поверхностью основания Δ из неравенства ε<Δ< обеспечивает условия, при которых ударник сталкивается с основанием при действии ускорения J, превышающего заданный минимальный порог срабатывания JΔ. При этом нижняя граница зазора (ε) обусловлена технологической погрешностью изготовления поверхностей бойка и основания, а верхняя граница
обеспечивает условия, при которых ударник сталкивается с основанием при действии ускорения J, превышающего заданный минимальный порог срабатывания JΔ. При этом нижняя граница зазора (ε) обусловлена технологической погрешностью изготовления поверхностей бойка и основания, а верхняя граница  - минимальной кинетической энергией ударника, достаточной для преодоления зазора Δ.
- минимальной кинетической энергией ударника, достаточной для преодоления зазора Δ.
Повышение устойчивости к дорожным ударам, снижения вероятности ложного срабатывания и повышения технологичности конструкции достигается оптимальным взаимным пространственным расположением элементов и узлов (ось симметрии упругого элемента перпендикулярна продольной оси ударника, ось симметрии вогнутой поверхности основания параллельна оси симметрии упругого элемента), при котором реализуются наилучшие условия отсутствия соударений ударника с основанием при действии транспортных вибраций и дорожных ударов. Одновременно обеспечивается максимальная простота конструкции, способствующая повышению технологичности датчика соударений при массовом производстве. В общем случае выполнения конструкции могут не соблюдаться условия перпендикулярности оси симметрии упругого элемента продольной оси ударника и параллельности оси симметрии вогнутой поверхности основания оси симметрии упругого элемента. Эти отклонения могут быть в пределах угла изгиба упругого элемента, зависящего от величины зазора между бойком и вогнутой поверхностью основания Δ.
Повышение безотказности и долговечности работы осуществляется за счет исключения из конструкции датчика соударения промежуточных элементов, задействованных в цепи передачи электрического сигнала от пьезоэлемента к входу исполнительного устройства СПБ, таких как провод, лента, паяные (сварные) соединения, механические соединения и др. Упругий элемент одновременно играет роль и несущей пружины и выводного контакта, выступающего за габариты корпуса. Кроме того, плоские пружины имеют достаточно высокую чувствительность к закручиванию, что обеспечивает возможность разворота ударника и, соответственно, широкий угол срабатывания при боковых столкновениях автомобиля с преградой.
Повышение надежности срабатывания и помехоустойчивости достигается выбором оптимального зазора между бойком и вогнутой поверхностью основания из соотношения  , обеспечивающим максимум амплитуды выходного сигнала при прочих равных конструктивных параметрах упругой системы и уровнях механических возмущений.
, обеспечивающим максимум амплитуды выходного сигнала при прочих равных конструктивных параметрах упругой системы и уровнях механических возмущений.
Повышение виброустойчивости осуществляется за счет срыва или уменьшения амплитуды интенсивных резонансных колебаний упругой системы при резонансе пружины на частоте, близкой к резонансной частоте упругой системы. Наилучшие условия гашения резонанса обеспечиваются при совпадении резонансных частот упругой системы и пружины. Пределы разброса резонансной частоты пружины (f
Суть заявляемого датчика соударения будет ясна из прилагаемых чертежей.
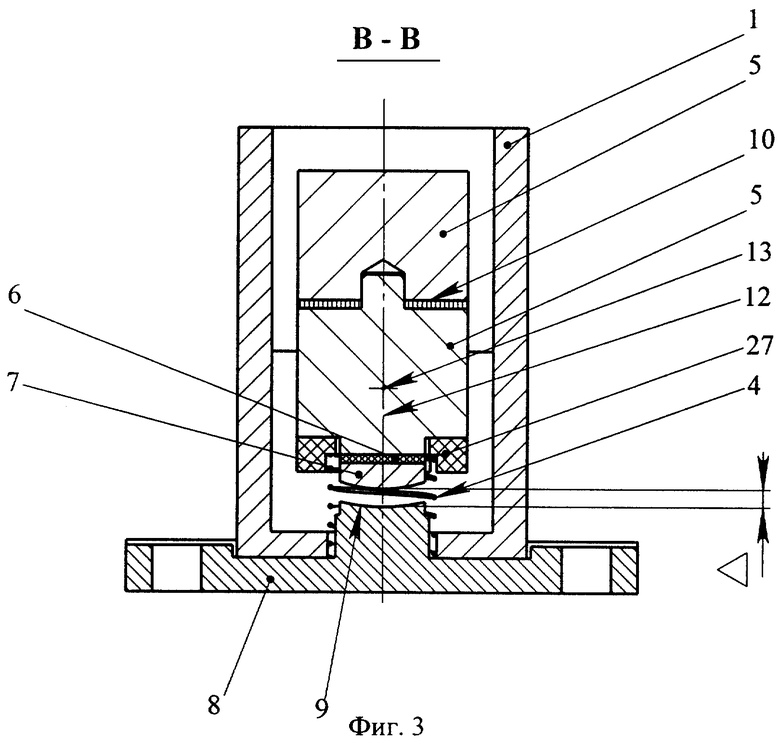
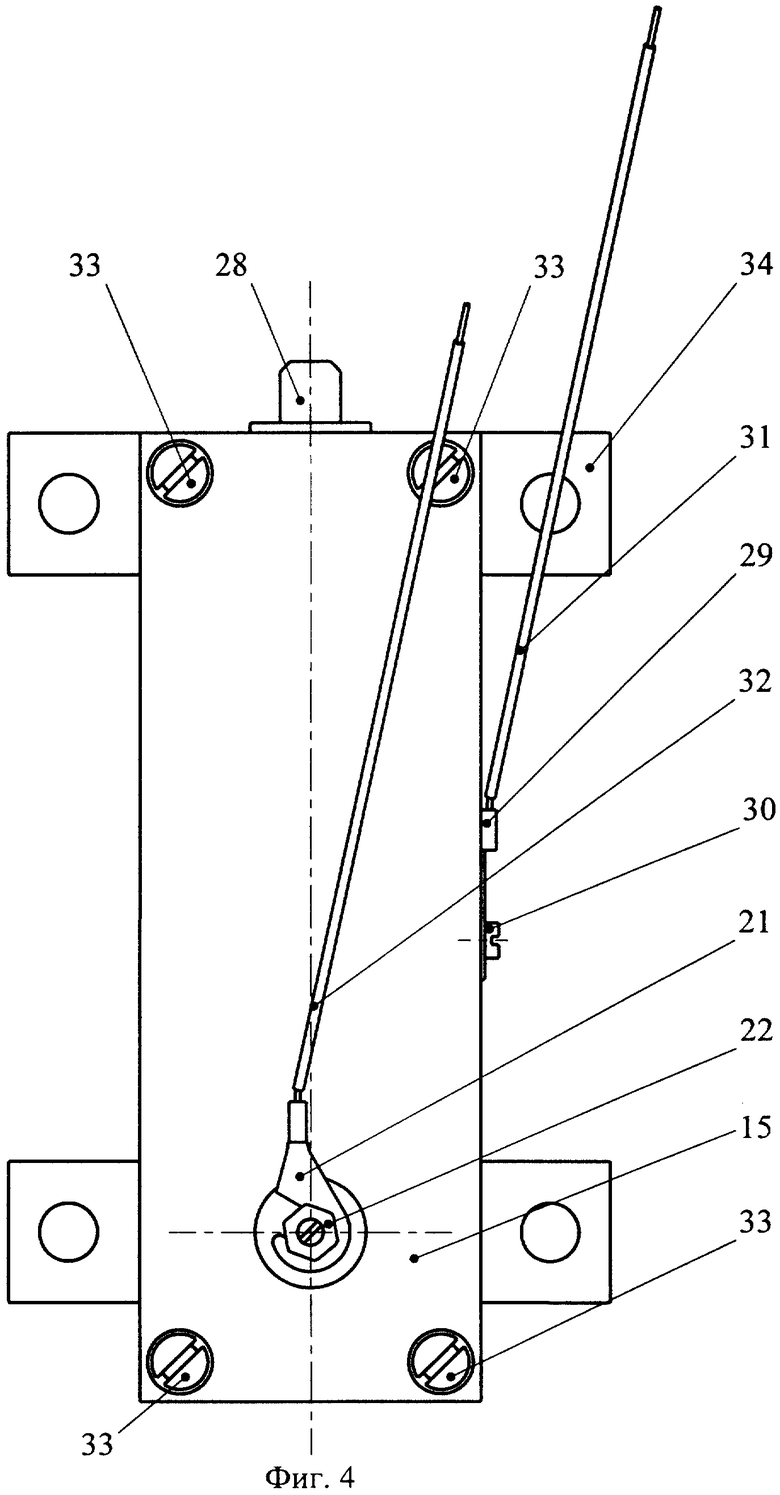
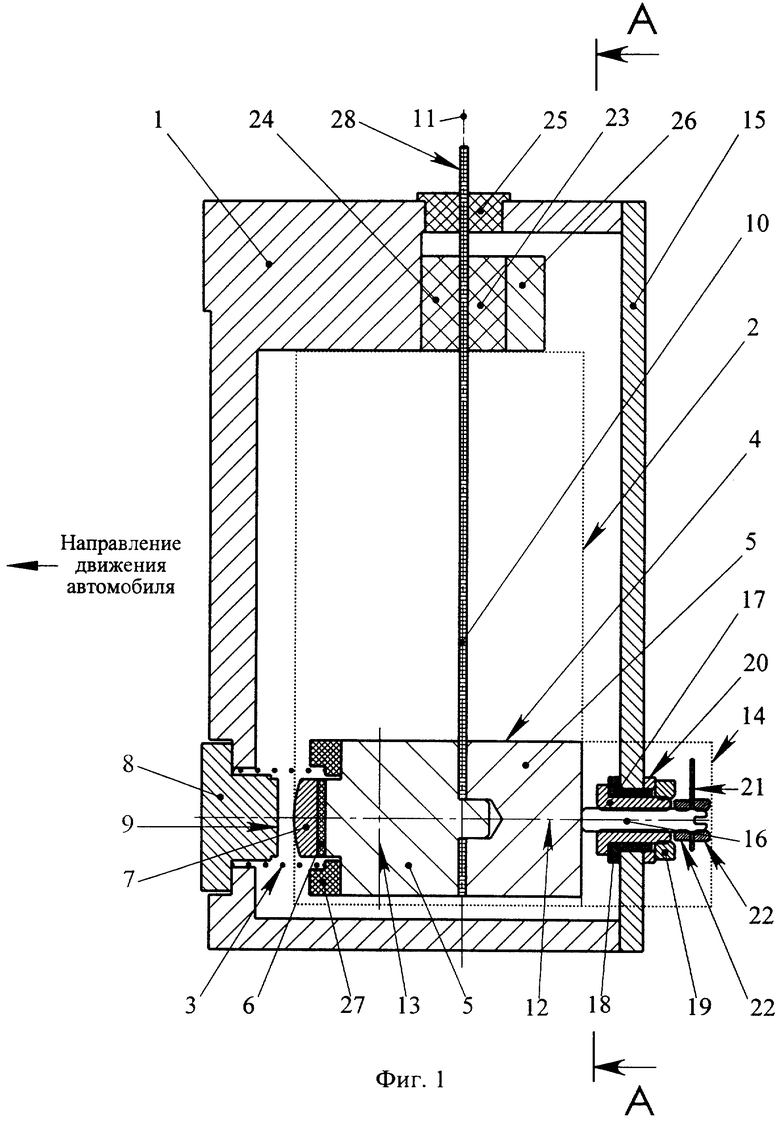
На фиг.1 изображена конструктивная схема предпочтительного варианта датчика соударения (продольный разрез), на фиг.2 - фронтальный разрез А-А, на фиг 3 - поперечный разрез В-В, на фиг.4 - внешний вид датчика соударения.
На фиг.1-4 показано: 1 - корпус; 2 - упругая система; 3 - пружина; 4 ударник; 5 - инерционный элемент; 6 - пьезоэлемент; 7 - боек; 8 - основание; 9 - вогнутая цилиндрическая поверхность основания; 10 - упругий элемент; 11 - ось симметрии упругого элемента; 12 - продольная ось ударника; 13 - ось симметрии вогнутой цилиндрической поверхности основания; 14 - контрольно-регулировочное устройство (КРУ); 15 - крышка; 16 - регулировочный винт; 17 - резьбовая втулка КРУ; 18 - изолятор КРУ; 19 - гайка КРУ; 20 - шайба КРУ; 21 - клемма провода КРУ; 22 - контрящая гайка клеммы КРУ; 23 - правый изолятор упругого элемента; 24 - левый изолятор упругого элемента; 25 - наружный изолятор выводного контакта; 26 - накладка упругого элемента; 27 - изолятор ударника; 28 - выводной контакт; 29 - клемма корпуса; 30 - винт клеммы корпуса; 31 – провод корпуса; 32 - провод КРУ; 33 - винт крышки; 34 - крепежные лапки; 35 - винт накладки; 36 - винт инерционного элемента.
На фронтальном разрезе А-А условно не показан узел вывода контакта корпуса: сборка клеммы корпуса 29, винта клеммы 30 и провода корпуса 31. На поперечном разрезе В-В (фиг.3) условно не показаны крышка 15, закрепленное на ней КРУ 14 и узел вывода контакта корпуса.
Датчик соударения содержит размещенную в корпусе 1 упругую систему 2, состоящую из поджатого с помощью цилиндрической пружины 3 и упругого элемента 10 ударника 4, выполненного в виде последовательно соединенных инерционного элемента 5, пьезоэлемента 6 и бойка 7. Ударник 4 установлен с возможностью перемещения в сторону основания 8 с вогнутой цилиндрической поверхностью 9 (см. фиг.3). Упругий элемент 10 соединен с одной стороны с корпусом 1, а с другой стороны - с инерционным элементом 5. Ось симметрии упругого элемента 11 пересекается с продольной осью ударника 12 и перпендикулярна ей (см. фиг 1, 3). Ось симметрии вогнутой цилиндрической поверхности 13 расположена в плоскости перемещения оси симметрии упругого элемента 11. В исходном поджатом состоянии ударника 4 ось симметрии вогнутой цилиндрической поверхности основания 13 параллельна оси симметрии упругого элемента 11. Конструктивные параметры упругой системы 2 выбраны из условий  <
< <
< и
и  . Величина зазора Δ при сборке датчика соударения регулируется с помощью контрольно-регулировочного устройства 14, установленного на крышке 15, путем вращения регулировочного винта 16. КРУ 14 включает также резьбовую втулку 17, закрепленную на крышке 15 через изолятор 18 с помощью гайки 19 и шайбы 20. На регулировочном винте 16 закреплена гайками 22 клемма 21, в которую заделан провод КРУ 32. С помощью КРУ 14 контролируется при сборке сила и, соответственно, ускорение отрыва ударника 4 от крышки 15 и при эксплуатации датчика соударения в составе СПБ - момент времени отрыва ударника 4 от крышки 15. Инерционный элемент 5 состоит из двух частей, между которыми зажат нижний конец упругого элемента 10. Данная сборка скреплена винтами 36 (см. фиг.2). Верхний конец упругого элемента 10 поджат к корпусу 1 через накладку 26 и правый (23) и левый (24) изоляторы с помощью винтов 35. Упругий элемент 10 выполнен в виде плоской пружины из электропроводного материала. Выводной контакт 28 выполнен за одно целое с упругим элементом 10 и выступает за верхний габарит корпуса 1. Контакт 28 изолирован от корпуса 1 с помощью наружного изолятора 25. Пьезоэлемент 6 выполнен в виде диска с электродами на торцовых поверхностях и склеен с одной стороны с инерционным элементом 5, а с другой стороны с бойком 7 в виде цилиндра с полусферической поверхностью на нижнем конце. Основание 8 выполнено в виде параллелепипеда с центральным цилиндром, свободный конец которого имеет форму вогнутой цилиндрической поверхности 9 (см. фиг.3). Основание 8 соединено с корпусом 1 с помощью четырех винтов (на фиг.1-4 не показаны). Отверстия на концах параллелепипеда основания 8 служат для крепления к шасси автомобиля. Цилиндрическая пружина 3 охватывает цилиндр основания 8, боек 7 и пьезоэлемент 6 и поджимает ударник 4 к КРУ 14 через изолятор 27. Собственная частота цилиндрической пружины f1 выбрана равной собственной частоте упругой системы 2 в свободном состоянии. Внутреннюю полость датчика закрывает крышка 15, поджатая к корпусу 1 винтами 33, и защищает внутреннюю полость датчика от загрязнений, влаги и горюче-смазочных материалов (см. фиг.4). Электрический контакт с корпусом осуществляется через провод 31 с применением клеммы 29, закрепленной на боковой поверхности корпуса 1 с помощью винта 30. Крепление датчика к шасси автомобиля (или других местах установки) производится с помощью четырех лапок 34. При этом ударник датчика ориентирован в направлении движения автомобиля (фиг.1).
. Величина зазора Δ при сборке датчика соударения регулируется с помощью контрольно-регулировочного устройства 14, установленного на крышке 15, путем вращения регулировочного винта 16. КРУ 14 включает также резьбовую втулку 17, закрепленную на крышке 15 через изолятор 18 с помощью гайки 19 и шайбы 20. На регулировочном винте 16 закреплена гайками 22 клемма 21, в которую заделан провод КРУ 32. С помощью КРУ 14 контролируется при сборке сила и, соответственно, ускорение отрыва ударника 4 от крышки 15 и при эксплуатации датчика соударения в составе СПБ - момент времени отрыва ударника 4 от крышки 15. Инерционный элемент 5 состоит из двух частей, между которыми зажат нижний конец упругого элемента 10. Данная сборка скреплена винтами 36 (см. фиг.2). Верхний конец упругого элемента 10 поджат к корпусу 1 через накладку 26 и правый (23) и левый (24) изоляторы с помощью винтов 35. Упругий элемент 10 выполнен в виде плоской пружины из электропроводного материала. Выводной контакт 28 выполнен за одно целое с упругим элементом 10 и выступает за верхний габарит корпуса 1. Контакт 28 изолирован от корпуса 1 с помощью наружного изолятора 25. Пьезоэлемент 6 выполнен в виде диска с электродами на торцовых поверхностях и склеен с одной стороны с инерционным элементом 5, а с другой стороны с бойком 7 в виде цилиндра с полусферической поверхностью на нижнем конце. Основание 8 выполнено в виде параллелепипеда с центральным цилиндром, свободный конец которого имеет форму вогнутой цилиндрической поверхности 9 (см. фиг.3). Основание 8 соединено с корпусом 1 с помощью четырех винтов (на фиг.1-4 не показаны). Отверстия на концах параллелепипеда основания 8 служат для крепления к шасси автомобиля. Цилиндрическая пружина 3 охватывает цилиндр основания 8, боек 7 и пьезоэлемент 6 и поджимает ударник 4 к КРУ 14 через изолятор 27. Собственная частота цилиндрической пружины f1 выбрана равной собственной частоте упругой системы 2 в свободном состоянии. Внутреннюю полость датчика закрывает крышка 15, поджатая к корпусу 1 винтами 33, и защищает внутреннюю полость датчика от загрязнений, влаги и горюче-смазочных материалов (см. фиг.4). Электрический контакт с корпусом осуществляется через провод 31 с применением клеммы 29, закрепленной на боковой поверхности корпуса 1 с помощью винта 30. Крепление датчика к шасси автомобиля (или других местах установки) производится с помощью четырех лапок 34. При этом ударник датчика ориентирован в направлении движения автомобиля (фиг.1).
Настройка зазора А и ускорения отрыва ударника 4 от крышки 15 при сборке датчика производится с помощью КРУ 14 и левого подборного изолятора 24 через технологические отверстия в корпусе 1 (на фиг.1-4 не показаны).
Датчик соударения работает следующим образом.
При неаварийном торможении с ускорением J ниже порога отрыва ударника 4 от крышки 15 (J0) сигнал на выходе датчика отсутствует (разомкнута электрическая цепь "электрод пьезоэлемента - боек -корпус". Данный порог J0 является основным элементом защиты СПБ от ложных срабатываний при транспортной вибрации и тряске автомобиля и реализуется путем предварительного поджатия ударника 4 к крышке 15 через КРУ 14 с помощью упругого элемента 10 и цилиндрической пружины 3.
При торможении с ускорением J>J0 ударник 4 отрывается от регулировочного винта 16 и движется в сторону основания 8. При этом размыкается контакт между инерционным элементом 5 и КРУ 14. Если кинетическая энергия ударника 4 не превосходит сумму потенциальных энергий упругого элемента 10 и пружины 3, то ударник 4 не преодолевает зазор А и возвращается в исходное поджатое положение. При этом электрическая цепь "электрод пьезоэлемента - боек - основание - корпус" остается разомкнутой. Зазор Δ предохраняет СПБ от ложных срабатываний при интенсивной тряске и наезде на относительно небольшие препятствия.
При аварийном торможении или столкновении автомобиля, когда ускорение торможения превышает заданное минимальное ускорение срабатывания J≥JΔ>J0, ударник 4 преодолевает зазор Δ и выпуклой поверхностью бойка 7 ударяется о вогнутую цилиндрическую поверхность основания 8. Замыкается электрическая цепь "пьезоэлемент - боек -основание - корпус", и на выходе датчика соударения формируется электрический сигнал U, пропорциональный скорости бойка к моменту его соударения с основанием 8. Эта зависимость носит экспоненциальный характер, показатель степени которой определяется формой поверхностей бойка 7 и вогнутой поверхности основания 9. Амплитуда выходного сигнала датчика U также зависит от массы ударника 4, зазора Δ, жесткостей упругого элемента 10 и пружины 3. При боковых ударах плоская пружина 10 под действием крутящего момента закручивается, что обеспечивает широкий угол срабатывания. Амплитуда выходного сигнала при этом пропорциональна косинусу угла столкновения автомобиля с преградой.
При воздействии интенсивной транспортной вибрации, тряске и наезде на относительно небольшие препятствия качания и поперечные колебания ударника ограничены упругим элементом, обеспечивающим направленность движения ударника к центру вогнутой цилиндрической поверхности основания, ориентированной в направлении действия механических возмущений, вызванных ездой по неровной дороге. Выбор зазора Δ из условия  обеспечивает максимум амплитуды выходного сигнала при прочих равных конструктивных параметрах упругой системы и уровнях воздействующих ускорений.
обеспечивает максимум амплитуды выходного сигнала при прочих равных конструктивных параметрах упругой системы и уровнях воздействующих ускорений.
При возможном дребезге (периодическом отрыве ударника от регулировочного винта) упругая система периодически изменяет свое упругое состояние, что обеспечивает снижение уровня резонансных колебаний, повышение виброустойчивости датчика соударения и, соответственно, снижение вероятности ложного срабатывания. При этом собственные резонансные колебания цилиндрической пружины на частоте, близкой к собственной частоте упругой системы, способствуют гашению резонанса упругой системы.
Источники информации
1. Авторское свидетельство СССР №1181919 МКИ4 В 60 R 21/02. Устройство воспламенения электрозапала, защитной удерживающей системы пассивной безопасности/Филиппов Ю.В., Янчич В.В., Крамаров О.П. и др.// БИ 36 от 30.09.85, приоритет от 26.06.84.
2. Патент РФ на изобретение №2000028 МКИ5 G 01 Р 15/04, 15/09. Датчик соударения для автомобильных систем аварийной защиты/Баженов А.А., Смирнов В.В., Яровиков В.И.//БИ 6 от 15.02.93, приоритет от 17.02.92.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНО-ВРАЩАТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2062691C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОЧНОСТИ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2170920C2 |
| УСТРОЙСТВО ДЛЯ ЗАДЕЙСТВОВАНИЯ СРЕДСТВА ПАССИВНОЙ БЕЗОПАСНОСТИ ПРИ БОКОВЫХ СТОЛКНОВЕНИЯХ АВТОМОБИЛЯ | 2004 |
|
RU2271945C2 |
| Гайковерт ударно-импульсного действия | 1985 |
|
SU1315282A1 |
| Устройство для забивки дюбелей | 1987 |
|
SU1544548A1 |
| Устройство воспламенения электрозапала защитной удерживающей системы пассивной безопасности | 1984 |
|
SU1181919A1 |
| БОЕК УСТРОЙСТВА ДЛЯ ЧЕКАНКИ | 1996 |
|
RU2100176C1 |
| УДАРНЫЙ ГАЙКОВЕРТ | 1992 |
|
RU2068337C1 |
| Стенд для ударных испытаний | 2017 |
|
RU2655700C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 1996 |
|
RU2114255C1 |
Изобретение относится к области контроля параметров движения, а именно к пороговым преобразователям механической энергии удара при столкновении автомобиля с препятствием в электрический сигнал для инициирования автомобильных систем пассивной безопасности водителя и пассажиров. Датчик соударения содержит размещенную в корпусе упругую систему, состоящую из поджатого с помощью пружины и упругого элемента ударника, выполненного в виде последовательно соединенных инерционного элемента, пьезоэлемента и бойка. Ударник установлен с возможностью перемещения в сторону основания с вогнутой цилиндрической поверхностью. Упругий элемент соединен с одной стороны с корпусом, а с другой стороны – с инерционным элементом. Ось симметрии упругого элемента пересекается с продольной осью ударника. Ось симметрии цилиндрической поверхности расположена в плоскости перемещения оси симметрии упругого элемента. Конструктивные параметры упругой системы выбираются из определенных условий. При этом ось симметрии упругого элемента может быть перпендикулярна продольной оси ударника, а ось симметрии вогнутой поверхности основания параллельна оси симметрии упругого элемента. Упругий элемент может быть выполнен из электропроводного материала, например, в виде плоской пружины и служит выводным электрическим контактом. Техническим результатом является повышение устойчивости к транспортной вибрации и дорожным ударам и снижение вероятности ложного срабатывания. 6 з.п. ф-лы, 4 ил.
 и
и 
где  – жесткость пружины в продольном направлении;
– жесткость пружины в продольном направлении;  – жесткость упругого элемента в поперечном направлении;
– жесткость упругого элемента в поперечном направлении;  – жесткость упругого элемента в продольном направлении; ε – суммарная погрешность отклонения формы бойка и вогнутой поверхности основания; Δ – зазор между бойком и вогнутой поверхностью основания; JΔ – заданное минимальное ускорение срабатывания; М – масса ударника.
– жесткость упругого элемента в продольном направлении; ε – суммарная погрешность отклонения формы бойка и вогнутой поверхности основания; Δ – зазор между бойком и вогнутой поверхностью основания; JΔ – заданное минимальное ускорение срабатывания; М – масса ударника.

| RU 2000028 C, 15.02.1993 | |||
| Устройство воспламенения электрозапала защитной удерживающей системы пассивной безопасности | 1984 |
|
SU1181919A1 |
| US 5282387 A, 01.02.1994 | |||
| Вентилятор, в частности, для турбинного двигателя | 2014 |
|
RU2677769C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 1998 |
|
RU2164692C2 |

