Настоящее изобретение относится в общем случае к беспроводной связи и, в частности, касается приемного устройства и способа для обнаружения мобильной станции (МС) на базовой станции (БС).
Федеральный комитет по связи ФКС (FCC) США устанавливает, что для службы общественной безопасности (службы экстренной помощи (Е911)) должна быть реализована функция обнаружения местоположения МС. ФКС требует, чтобы к октябрю 2001 года поставщик услуг беспроводной связи имел возможность определения местоположения абонента, вызывающего службу Е-911, с точностью 125 метров в 67% случаев. Таким образом, в стандарте МДКР (множественный доступ с кодовым разделением каналов) (TI/EIA/IS-95), также как и в системе IMT-2000 (Международная электросвязь - 2000) прилагаются усилия, чтобы обеспечить услугу определения местоположения МС с использованием функции обратной линии связи под названием "PUF" (ФВП - функция включения питания). ФВП представляет собой схему определения местоположения МС, где МС, находясь в аварийной ситуации, передает зонды с постепенно нарастающей мощностью на множество соседних БС по обратному каналу, информируя их о своем местоположении, так что каждая БС может вычислить расстояние между БС и МС путем оценки времени, которое ушло на распространение сигнала до БС. Функция ФВП обеспечивается в стандарте IS-95B. Однако ФВП в стандарте IS-95B может ухудшить рабочие характеристики системы, поскольку МС увеличивает свою мощность передачи по собственному усмотрению. То есть повышенная мощность передачи конкретной МС создает помехи для других МС. Затем БС выполняет непрерывный контроль мощности для уменьшения мощности передачи конкретной МС, что увеличивает нагрузку на систему. Следовательно, существует потребность создания услуги непрерывного позиционирования, которая не ухудшает рабочие характеристики системы из-за увеличения помех.
Таким образом, в основу настоящего изобретения положена задача создания для БС эффективного приемного устройства и способа для обнаружения местоположения МС.
Другой задачей является создание устройства и способа для обнаружения местоположения МС, не ухудшающего рабочие характеристики системы из-за увеличения помех.
Еще одной задачей настоящего изобретения является создание устройства и способа для обнаружения местоположения МС с использованием обратного канала, который принимается на БС от МС, в условиях применения системы связи с МДКР.
Следующей задачей настоящего изобретения является создание устройства и способа для оценки направления на МС, на основе угла падения обратного канала, который принимается от МС на БС системы мобильной связи.
Еще одной задачей настоящего изобретения является создание устройства и способа для определения местоположения МС путем оценки направления на МС, на основе угла падения обратного канала, который принимается от МС, и измерения на БС системы мобильной связи расстояния между БС и МС на основе задержки на распространение сигнала в прямом и обратном направлении.
В настоящем изобретении предлагается способ определения местоположения МС, реализующий услугу непрерывного позиционирования, которая при практическом осуществлении не вызывает ухудшения рабочих характеристик системы из-за возрастания уровня помех, наблюдаемого при использовании функции ФВП в стандарте IS-95B. Способ определения местоположения согласно настоящему изобретению основан на том, что БС измеряет угол падения сигнала МС, принимаемого через канал обратной линии связи, и определяет относительное направление на МС по отношению к БС на основе измеренного угла падения.
Вышеуказанные и другие задачи, признаки и преимущества настоящего изобретения очевидны из последующего подробного описания, рассматриваемого вместе с чертежами, на которых
фиг. 1 изображает схему падения обратного канала от МС на БС;
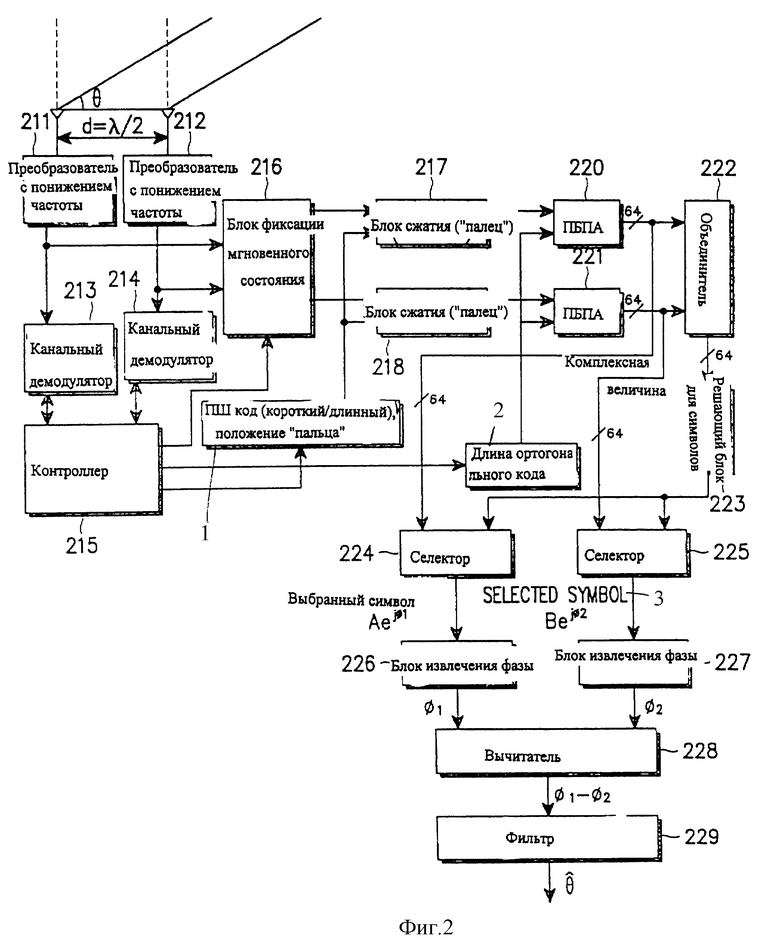
фиг. 2 - блок-схему приемника БС, который получает угол падения обратного сигнала, принимаемого от МС, для позиционирования МС согласно первому варианту осуществления настоящего изобретения;
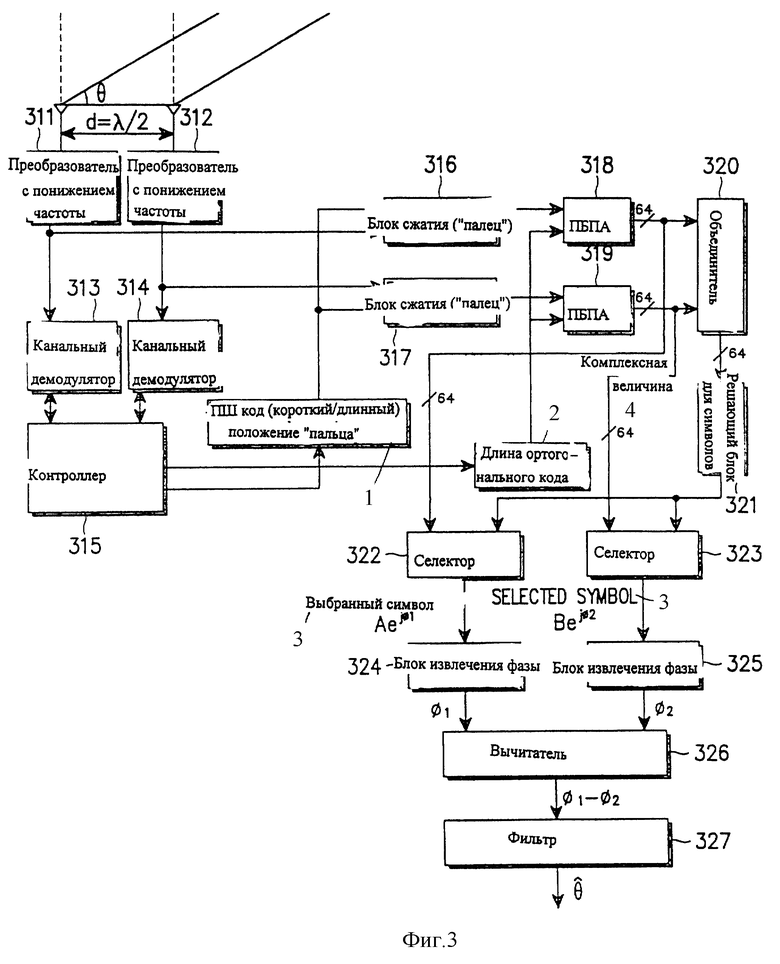
фиг. 3 - блок-схему приемника БС, который получает угол падения обратного сигнала, принимаемого от МС, для позиционирования МС согласно второму варианту осуществления настоящего изобретения;
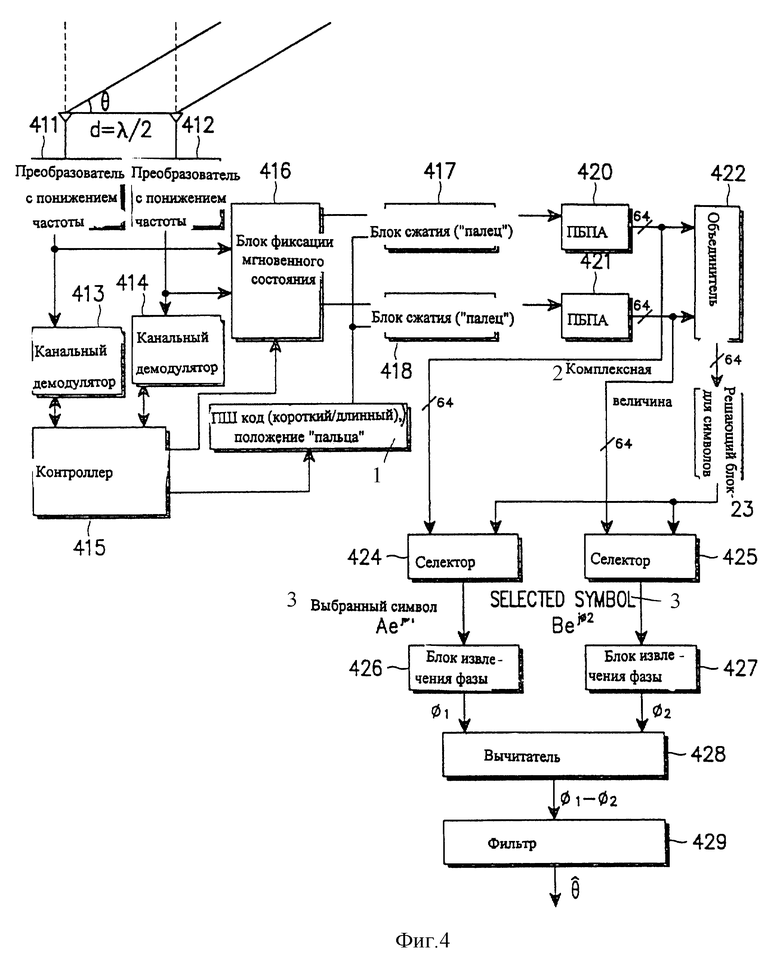
фиг. 4 - блок-схему приемника БС, который аналогичен приемнику БС, показанному на фиг. 2, за исключением того, что контроллер не подает информацию об ортогональном коде сигнала МС в преобразователи, реализующие быстрое преобразование Адамара (ПБПА), согласно третьему варианту осуществления настоящею изобретения; и
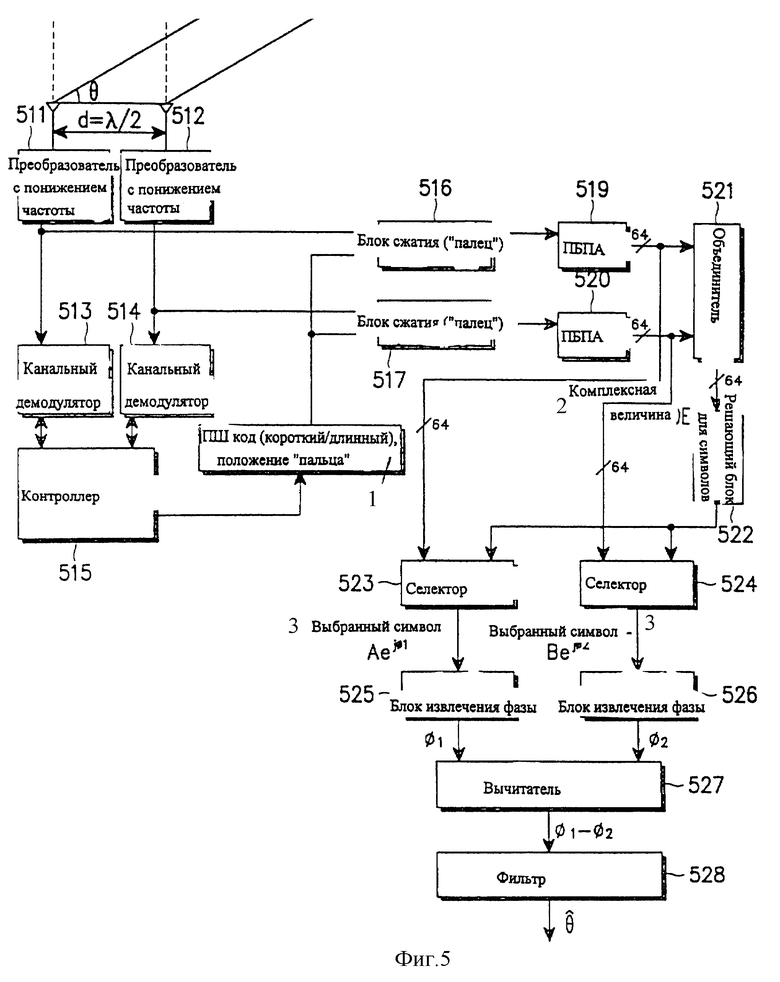
фиг. 5 - блок-схему приемника БС, который аналогичен приемнику БС, показанному на фиг. 3, за исключением того, что контроллер не подает информацию об ортогональном конце сигнала МС в преобразователи, реализующие быстрое преобразование Адамара (ПБПА), согласно четвертому варианту осуществления настоящего изобретения.
Ниже со ссылками на сопроводительные чертежи описываются предпочтительные варианты осуществления настоящего изобретения. В последующем описании хорошо известные функции или конструкции подробно не описываются, чтобы не затемнять существа изобретения ненужными деталями.
Нижеследующее описание основано на том обстоятельстве, что канал, используемый для измерения направления на МС по отношению к БС, является обратным каналом. Обратные каналы включают обратный канал пилот-сигнала, обратный основной канал, обратный дополнительный канал и обратный канал управления.
Когда для приема сигнала обратного канала для отслеживания на БС местоположения МС согласно предпочтительному варианту осуществления настоящего изобретения используются две антенны, сконфигурированные на основе концепции антенной решетки, они принимают падающий сигнал без компенсации его фазы, причем падающий сигнал используется для оценки угла падения принимаемого сигнала на основе фазового сдвига сигнала, принимаемого через каждую антенну, в отличие от антенной решетки, которая увеличивает скорость приема путем компенсации фазового сдвига падающего сигнала. Соответственно упрощается демодулятор по сравнению с известной антенной решеткой.
На фиг. 1 показаны углы падения сигнала обратного канала, принимаемого на БС.
Когда МС находится ближе к БС, ее местоположение обнаруживается более точно в предпочтительных вариантах настоящего изобретения, как показано на фиг. 1. Когда сигнал обратного канала передается от МС, расположенной на определенном расстоянии от БС, этот сигнал рассеивается в определенном диапазоне вокруг МС из-за отражения и передачи от и на объекты, находящиеся поблизости от МС. В большинстве случаев радиус рассеяния r(d) увеличивается прямо пропорционально расстоянию между БС и МС. Если предположить, что БС может точно измерить угол падения обратного сигнала, принимаемого от МС, то углы между направлениями, измеряемыми БС, и действительным направлением на МС составят Δθ1, Δθ2, Δθ3, и т.п. Следовательно, ошибка измерения направления возрастает с радиусом рассеяния r(d). Если ошибка по определенному направлению поддерживается ниже некоторого значения, то тогда действительная ошибка определения местоположения для близкой МС уменьшается. Максимальная ошибка определения местоположения МС будет равна r(d), только если точно измерена задержка на распространение сигнала в прямом и обратном направлении (ЗРСПОН). Здесь понятие "сигнал обратного канала" можно использовать для всех сигналов, принимаемых от МС на БС.
На фиг. 2 представлена блок-схема приемника БС, который измеряет угол падения сигнала обратного канала, принимаемого от МС, для того, чтобы определить местоположение МС в системе мобильной связи согласно первому варианту осуществления настоящего изобретения. Как показано на фиг. 2, БС имеет две антенны, расположенные друг от друга на расстоянии, меньшем половины длины волны несущей, для определения и травления сигнала обратного канала, принимаемого от МС. Однако если БС разбита на секторы, и ширина луча секторной антенны составляет 180o или менее, то нет необходимости поддерживать расстояние между антеннами меньшим половины длины волны. При увеличении расстояния между антеннами возрастает различие в многолучевом замирании принимаемых сигналов. Из-за возникающих в результате этого индивидуального изменения фаз предпочтительно, чтобы две антенны находились друг от друга на расстоянии, равном половине длины волны.
Обратимся к фиг. 2, где преобразователи 211 и 212 с понижением частоты преобразуют радиосигналы, принимаемые от соответствующих антенн, в сигналы промежуточной частоты (ПЧ), преобразуют сигналы ПЧ в сигналы основной полосы частот, а затем посредством дискретизации и квантования преобразуют сигналы группового спектра в цифровые сигналы в виде элементарных дискретизированных данных (chip sample data). Этот процесс должен выполняться с сигналами, принимаемыми через две антенны, одним и тем же образом. Следовательно, преобразователи 211 и 212 с понижением частоты должны иметь одни и те же рабочие характеристики. Устройство 216 фиксации мгновенного состояния фиксирует мгновенное состояние элементарных дискретизированных данных, выдаваемых из преобразователей 211 и 212 с понижением частоты в виде элементов символов данных (данные, передаваемые МС, которые не расширены) и запоминает сигналы фиксации мгновенного состояния под управлением контроллера 215. Размер запоминаемых элементарных дискретизированных данных лежит в пределах от одного символа до множества символов. Канальные демодуляторы 213 и 214 сжимают выходные сигналы преобразователей 211 и 212 с понижением частоты, чтобы восстановить сигналы, и подают информацию о начале символа, код Уолша для начального символа и псевдошумовой (ПШ) код определенного сигнала обратного канала в контроллер 215. Здесь канальные демодуляторы 213 и 214 представляют собой типовые рэйк-приемники (rake receivers) и выполняют функцию объединения сигналов, сжимаемых в каждом "пальце" (finger), как это используется в известной БС. Контроллер 215 обеспечивает общее управление БС. В элементарных дискретизированных данных, полученных в результате фиксации мгновенного состояния, все сигналы МС, направленные к БС, смешиваются. Для обнаружения сигнала конкретной МС контроллер 215 передает короткие и длинные ПШ коды, используемые в канальных демодуляторах 213 и 214 в момент фиксации мгновенного состояния, и точную фазу (положение "пальца") компоненты траектории, падающей с самым большим уровнем приема или раньше всех принимаемой компоненты траектории, полученной блоком поиска, на блоки 217 и 218 сжатия для сжатия элементарных дискретизированных данных, принимаемых от устройства 216 фиксации мгновенного состояния. Блоки 217 и 218 сжатия выделяются для одного и того же положения "пальца" для сжатия в одно и то же время. То есть, блоки 217 и 218 сжатия сжимают сигналы фиксации мгновенного состояния на базе ПШ кода (длинный код/короткий код) и положения "пальца", получаемого от контроллера 215. Сигнал МС, направление на которую необходимо определить, выделяется при выполнении вышеуказанной процедуры. Преобразователи 220 и 221, выполняющие быстрое преобразование Адамара (ПБПА), устанавливают корреляцию выходных сигналов блоков 217 и 218 сжатия посредством всех кодов Уолша, которые могут быть получены с помощью преобразования Адамара. Выполнение корреляции с помощью кода Уолша означает, что каждый ортогональный код и выходные данные из блоков 217 и 218 сжатия перемножаются и выводятся. В другом варианте контроллер 215 передает длину ортогональных кодов, соответствующих определенной МС, на ПБПА 220 и 221, после чего обнаружение того, какой код используется, будет вестись в течение максимум 20 мс (размер кадра). В этом случае ПБПА 220 и 221 выполняют преобразование Адамара для всех ортогональных кодов передаваемой длины. В ином случае контроллер 215 может обеспечить ортогональный код, соответствующий определенной МС с помощью ПБПА 220 и 221, но в этом случае скорость обработки контроллера 215 уменьшается, чтобы увеличить время, затрачиваемое на отслеживание положения МС. Объединитель 222 суммирует данные, прошедшие преобразование Адамара, которые принимаются от ПБПА 220 и 221. Решающий блок 223 для символов оценивает действительные символьные данные МС на выходе объединителя 222. Селекторы 224 и 225 избирательно выводят данные, полученные от ПБПА 220 и 221 во время оценки символов решающим блоком 223 для символов. Блок 216 фиксации мгновенного состояния, блоки 217 и 218 сжатия, ПБПА 220 и 221, объединитель 222, решающий блок 223 для символов и селекторы 224 и 225 могут быть определены в виде некоторой структуры, состоящей из блоков извлечения символьных данных для извлечения символов из элементарных дискретизированных данных. То есть, блок извлечения символьных данных может извлекать символьные данные из соответствующих элементарных дискретизированных данных с помощью информации о положении "пальца" и ПШ кода, определяемого двумя элементарными дискретизированными данными. В то же время ПШ код и информация о положении "пальца" определяется в соответствии с определенной МС канальными демодуляторами 213 и 214 и контроллером 215.
Блоки 226 и 227 извлечения фазы извлекают информацию о фазе символьных данных из выходных сигналов селектора 224 и 225. Вычитатель 228 вычисляет разность между данными о фазе, полученными от блоков 226 и 227 извлечения фазы. Фильтр 229 фильтрует выходной сигнал вычитателя 228, чтобы оценить окончательный угол падения при приеме для определенной МС. Поскольку разность фаз φ1 - φ2 непосредственно определяет относительную задержку распространения принимаемого сигнала на двух разнесенных антеннах, фильтр 229 выводит параметр оценки ключа  . Здесь фильтр представляет собой фильтр скользящего усреднения для непрерывного получения среднего значения на заранее определенном интервале, либо фильтр оценивания. Блоки 226 и 227 извлечения фазы, вычитатель 228 и фильтр 229 могут быть определены в виде блока оценки угла падения для извлечения разности фаз между символьными данными, извлеченными блоком извлечения символьных данных, и для оценивания угла падения принимаемого сигнала, определяемого с помощью выделенной разности фаз. Блок оценки положения (не показан) может оценить угол падения принимаемого сигнала от определенной МС, который вычисляется, как указано выше. Блок оценки положения измеряет расстояние между БС и МС на основе ЗРСПОН, а затем определяет окончательное положение МС на основе направления и расстояния. Блок оценки положения не показан, но он может быть реализован с помощью контроллера 215, показанного на фиг. 2, или в виде отдельного процессора.
. Здесь фильтр представляет собой фильтр скользящего усреднения для непрерывного получения среднего значения на заранее определенном интервале, либо фильтр оценивания. Блоки 226 и 227 извлечения фазы, вычитатель 228 и фильтр 229 могут быть определены в виде блока оценки угла падения для извлечения разности фаз между символьными данными, извлеченными блоком извлечения символьных данных, и для оценивания угла падения принимаемого сигнала, определяемого с помощью выделенной разности фаз. Блок оценки положения (не показан) может оценить угол падения принимаемого сигнала от определенной МС, который вычисляется, как указано выше. Блок оценки положения измеряет расстояние между БС и МС на основе ЗРСПОН, а затем определяет окончательное положение МС на основе направления и расстояния. Блок оценки положения не показан, но он может быть реализован с помощью контроллера 215, показанного на фиг. 2, или в виде отдельного процессора.
Как было описано выше, способ определения местоположения МС на основе фиксации мгновенного состояния согласно настоящему изобретению выгодно отличается тем, что местоположение любой МС может быть определено из данных фиксации мгновенного состояния. Чтобы сделать это, контроллер 215 извлекает сигналы МС, подавая ПШ коды (длинные коды/короткие коды) и данные о положении "пальцев" МС, которая передает сигналы обратного канала на БС, на блоки 217 и 218 сжатия во время фиксации мгновенных состояний. Затем контроллер 215 вычисляет угол падения при приеме исходя из разности фаз между двумя извлеченными сигналами для использования при позиционировании МС.
На фиг. 3 представлена блок-схема приемника БС для получения угла падения сигнала обратного канала, принимаемого от МС, для того, чтобы определить местоположение МС в системе мобильной связи согласно второму варианту осуществления настоящего изобретения. Во втором варианте положение МС определяется без фиксации мгновенного состояния принимаемых элементарных дискретизированных данных, так что угол падения сигнала обратного канала может быть измерен быстрее, чем в первом варианте, показанном на фиг. 2.
Обратимся к фиг. 3, где преобразователи 311 и 312 с понижением частоты преобразуют радиосигналы, принимаемые от соответствующих антенн, в сигналы промежуточной частоты (ПЧ), преобразуют сигналы ПЧ в сигналы основной полосы частот и преобразуют сигналы основной полосы частот в цифровые сигналы посредством дискретизации и квантования. Этот процесс необходимо выполнять с сигналами, принимаемыми через две антенны, одинаковым образом. Следовательно, преобразователи 311 и 312 с понижением частоты должны иметь одинаковые рабочие характеристики. Канальные демодуляторы 313 и 314 сжимают выходные сигналы преобразователей 311 и 312 с понижением частоты, чтобы восстановить сигналы и подать информацию о символьном времени, коде Уолша для начального символа и ПШ коде сигнала, передаваемого конкретной МС, на контроллер 315. Здесь канальные демодуляторы 313 и 314 представляют собой типовые рэйк-приемники, в функцию которых входит объединение сигналов, сжимаемых в каждом "пальце", как это используется в известной БС. Контроллер 315 обеспечивает общее управление БС. Для обнаружения сигнала определенной МС контроллер 315 передает короткие и длинные ПШ коды, используемые в канальных демодуляторах 313 и 314, и фазу (положение "пальца") компоненты траектории, падающей с максимальным уровнем приема, или ранее всех принятой компоненты траектории, полученной блоком поиска, на блоки 316 и 317. Блоки 316 и 317 сжатия сжимают сигналы, полученные от преобразователей 311 и 312 с понижением частоты, на основе ПШ кода (длинный код/короткий код) и положения "пальца", полученного от контроллера 315. Здесь сжатие выполняется с использованием одного и того же положения "пальца" в блоках 316 и 317 сжатия. Сигнал МС, направление на которую должно быть определено, извлекается при выполнении вышеуказанной процедуры. ПБПА 318 и 319 выполняет сжатие выходных сигналов блоков сжатия 316 и 317 с помощью всех кодов Уолша, которые могут быть получены с помощью преобразования Адамара. С другой стороны, специалистам в данной области техники понятно, что второй вариант осуществления изобретения может быть реализован таким же образом, как и вариант, обеспечивающий длину ортогонального кода или ортогональный код обеспечивается с помощью контроллера 315 по первому варианту. Объединитель 320 суммирует данные, прошедшие преобразование Адамара, которые принимаются от ПБПА 318 и 319. Решающий блок 321 для символов оценивает действительные символьные данные МС на выходе объединителя 320. Селекторы 322 и 323 избирательно выводят данные, полученные от ПБПА 318 и 319 во время оценки символьных данных. Блоки 324 и 325 извлечения фазы извлекают информацию о фазе символьных данных из выходных сигналов селекторов 322 и 323. Вычитатель 326 вычисляет разность между данными о фазе, полученными от блоков 324 и 325 извлечения фазы. Фильтр 327 фильтрует выходной сигнал вычитателя 326, чтобы получить параметр оценки (Е[φ1 - φ2] ) с окончательным углом падения при приеме для конкретной МС. Здесь фильтр представляет собой фильтр скользящего осреднения для непрерывного получения среднего значения на заранее определенном интервале, либо фильтр оценивания. Направление на МС может быть оценено на основе угла падения сигнала МС. Контроллер 315 измеряет расстояние между БС и МС на основе ЗРСПОН, а затем определяет окончательное положение МС на основе направления и расстояния.
Согласно второму варианту контроллер имеет возможность обеспечивать блоки сжатия информацией о ПШ кодах (длинный код/короткий код) и положении "пальца" только тогда, когда принимаемый сигнал МС имеет постоянное положение "пальца" (то есть, траекторию) даже в течение короткого времени, поскольку не фиксируется мгновенное состояние принимаемых элементарных дискретизированных данных. Можно предположить, что сигнал МС имеет постоянное положение "пальца", если траектория сигнала обратного канала изменяется несильно, МС находится на линии прямой видимости либо время сжатия (или время обработки) очень мало. То есть, структура на фиг. 3 может оценивать угол падения сигнала для одной МС. Однако параллельная обработка на пути от блоков сжатия к фильтру позволяет одновременно оценить углы падения обратных сигналов, принимаемых от множества МС.
На фиг. 4 представлена блок-схема приемника БС для получения угла падения сигнала обратного канала, принимаемого от определенной МС в системе мобильной связи, согласно третьему варианту осуществления настоящего изобретения. Приемник БС, показанный на фиг. 4, аналогичен по конфигурации приемнику, показанному на фиг. 2, за исключением того, что контроллер 415 не подает в ПБПА 420 и 421 длину ортогонального кода. Таким образом, ПБПА 420 и 421 устанавливают корреляцию входного сигнала со всеми ортогональными кодами любой длины. Если ПБПА 420 и 421 могут принять длину ортогонального кода от контроллера 415, как на фиг. 2, то преобразование Адамара может быть выполнено более эффективно, чем корреляция со всеми ортогональными кодами со всеми значениями длины. Вычисляется разность фаз между двумя сигналами, обнаруженными в результате преобразования Адамара, а затем на основе разности фаз оценивается угол падения сигнала обратного канала.
На фиг. 5 представлена блок-схема приемника БС для получения угла падения сигнала обратного канала, принимаемого от определенной МС в системе мобильной связи согласно четвертому варианту осуществления настоящего изобретения. Приемник БС, показанный на фиг. 5, аналогичен по конфигурации приемнику, показанному на фиг. 3, за исключением того, что контроллер 515 не подает в ПБПА 519 и 520 длину ортогонального кода. Таким образом, ПБПА 519 и 520 устанавливают корреляцию входного сигнала со всеми ортогональными кодами. Если ПБПА 519 и 520 могут принять длину ортогонального кода от контроллера 515, как в одном из предыдущих вариантов, то преобразование Адамара может быть выполнено более эффективно, чем корреляция со всеми ортогональными кодами. Вычисляется разность фаз между двумя сигналами, обнаруженными в результате преобразования Адамара, а затем на основе разности фаз оценивается угол падения сигнала обратного канала.
Как было описано выше, предпочтительные варианты осуществления настоящего изобретения позволяют определить местоположение всех МС без изменения стандартных физических уровней. Стандартная функция ФВП увеличивает взаимные помехи между МС, но согласно предпочтительным вариантам осуществления настоящего изобретения БС может более эффективно определять местоположение МС, используя обратный сигнал, принимаемый от МС, без необходимости выполнения на МС какой-либо специальной операции.
Хотя изобретение было продемонстрировано и описано со ссылками на конкретные предпочтительные варианты его осуществления, специалистам в данной области техники очевидны различные изменения по форме и в деталях, которые могут быть в него внесены, не выходя за рамки существа и объема изобретения, определенных в прилагаемой формуле изобретения.
Устройство и способ для определения местоположения мобильной станции (МС) в системе мобильной связи. В устройстве, определяющем местоположение МС, первая антенна и вторая антенна базовой станции разнесены друг от друга на расстояние, эквивалентное длине волны канала передачи МС, умноженной на заранее определенный коэффициент, к примеру одна вторая. Первый преобразователь с понижением частоты и второй преобразователь с понижением частоты преобразуют сигналы, принимаемые от первой и второй антенн, в сигналы основной полосы частот и выполняют преобразование сигналов основной полосы частот в цифровую форму в виде элементарных дискретизированных данных. Первый канальный демодулятор и второй канальный демодулятор восстанавливают элементарные дискретизированные данные, полученные от первого и второго преобразователей с понижением частоты, и выводят информацию о начале символа и ПШ коде сигнала конкретной МС. Контроллер выдает ПШ код для идентификации конкретной МС и информацию о положении "пальца" на основе информации о начале символа и ПШ коде, полученной от первого и второго демодуляторов. Вдобавок, на контроллер из демодулятора может подаваться информация по ортогональным кодам, в этом случае контроллер будет выдавать информацию, относящуюся к конкретному коду Уолша. Блок извлечения символьных данных извлекает два символа конкретной МС из элементарных дискретизированных данных, получаемых от первого и второго преобразователей с понижением частоты, на основе информации о ПШ коде и положении "пальца". Блок оценки угла падения оценивает угол падения принимаемого сигнала исходя из разности фаз между двумя извлеченными символами. Блок оценки местоположения оценивает местоположение конкретной МС на основе оцененного угла падения и задержки на распространение сигнала в прямом и обратном направлении (ЗРСПОН), измеренной для данной МС. Достигаемым техническим результатом является повышение эффективности обнаружения местоположения мобильной станции. 4 с. и 16 з.п. ф-лы, 5 ил.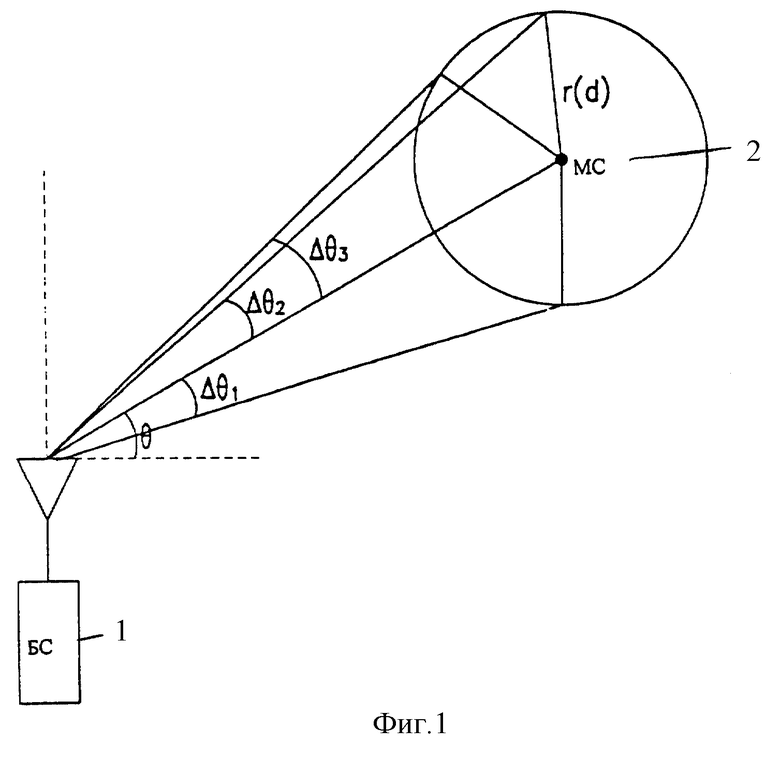
| US 5592180 A, 07.01.1997 | |||
| НАЗЕМНАЯ МОБИЛЬНАЯ СТАНЦИЯ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ | 1993 |
|
RU2069936C1 |
| US 5644318 A, 01.07.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |

