Объектом настоящего изобретения является колесное транспортное средство, приводимое в движение мышечной силой, в частности передвижное кресло-коляска, имеющее, по меньшей мере, одно ведущее колесо, в которое встроен безредукторный электродвигатель с внешним ротором, расположенный между неподвижным узлом крепления колеса и вращающимися функциональными элементами конструкции колеса и обеспечивающий передачу дополнительного крутящего момента, управляемую посредством аппаратуры управления, при этом статор этого электродвигателя установлен по внешней окружности узла крепления колеса, а ротор этого электродвигателя, опирающийся на узел крепления колеса посредством шарикоподшипника, соединен с вращающимися функциональными элементами конструкции колеса.
Подобная конструкция известна из DE 9422016 U1, где раскрывается вспомогательный электрический привод передвижного, в частности, за счет тяги или толкания устройства с основным приводом от мышечной силы человека или животного. На ободе неподвижного узла крепления колеса расположен статор электродвигателя с внешним ротором, а вращающиеся функциональные элементы конструкции колеса установлены в подшипниковой опоре непосредственно на ступице узла крепления колеса. Эта вращающаяся часть колеса содержит корпус, замкнутый со всех сторон и охватывающий снаружи упомянутый обод. На внутренней поверхности этого корпуса установлены магниты внешнего ротора. С торца этот корпус может быть соединен винтами с внешней горшкообразной частью, которая закрывает указанный корпус с торца и окружает его по периферии, а также несет на себе снаружи эластичную шину. Вспомогательным приводом служит синхронный трехфазный электродвигатель. Ось колеса выполнена в виде удлиненного короба, в котором размещены аккумуляторные батареи. Вместе с тем колеса могут быть также исполнены со встроенными электродвигателями, собственными встроенными аккумуляторными батареями, а также соответствующей аппаратурой управления. Колеса установлены на ступицах, которые крепятся с помощью штекерных соединителей, стопорящих ступицы от вращения, которые скомбинированы со штекерными разъемами, соединяющими линии управления, электроснабжения колес и т. п. В качестве датчика момента в первую очередь предусмотрены тензометрические полоски. При этом в качестве первоочередного варианта применения вспомогательного привода рассматривается тележка для игры в гольф, которую обычно тянут руками.
В основу изобретения положена задача усовершенствования описанного выше колесного транспортного средства, в частности усовершенствования его конструкции и характеристик управления.
Применительно к колесному транспортному средству типа описанного выше решение этой задачи основано на следующих признаках:
узел крепления колеса снаружи ограничивает кольцевую полость, расположенную концентрически вокруг ступичной части узла крепления колеса, причем в этой кольцевой полости расположены упомянутая аппаратура управления электродвигателем, а также аккумулятор и/или аккумуляторная батарея, ротор установлен на подшипнике по внешней окружности узла крепления колеса;
ведущее колесо снабжено ободом ручного привода;
датчик момента подает на аппаратуру управления электродвигателем сигналы для определения значения крутящего момента, прилагаемого вручную к ободу ручного привода.
В первом варианте осуществления изобретения датчик момента может иметь два расположенных на одной оси и на одинаковом расстоянии друг от друга кольцевых диска, имеющих светлые и темные участки равной ширины, на которые параллельно оси дисков падает световой луч, и соединенных с ободом ручного привода или с кольцевым корпусом ротора и между собой посредством крутильной пружины, при этом ослабление светового луча, выраженное аналоговым сигналом, характеризует задающее воздействие для управления электродвигателем с внешним ротором.
В несколько видоизмененном варианте изобретения найдена целесообразной такая конструкция, в которой обод ручного привода посредством листовых пружин соединен с валиком, закрепленным в одном из вращающихся функциональных элементов колеса, предпочтительно в силовом ободе, с возможностью поворота относительно сельсина-датчика, который преобразует поворот валика, происходящий вследствие приложения руками крутящего момента к ободу ручного привода, в электрический сигнал, подаваемый на аппаратуру управления электродвигателем.
В еще одном видоизмененном варианте изобретения полезный результат может быть достигнут за счет того, что обод ручного привода посредством листовых пружин соединен с валом, который закреплен в одном из вращающихся функциональных элементов колеса, предпочтительно в силовом ободе, с возможностью поворота и кинематически связан со сдвижным кольцом таким образом, что поворот вала, происходящий вследствие приложения руками крутящего момента к ободу ручного привода, приводит к смещению сдвижного кольца в направлении, параллельном оси колеса, относительно чувствительного элемента, установленного на невращающемся элементе конструкции колеса, предпочтительно на узле крепления колеса, снаружи его внешнего радиуса, и преобразующего ход сдвижного кольца в электрический сигнал, подаваемый на аппаратуру управления электродвигателем.
Ведущее колесо предпочтительно соединено с рамой транспортного средства только механически, посредством быстроразъемного соединения, и поэтому не требует никакого электрического соединения.
Благодаря тому что в предложенной конструкции шарикоподшипниковые опоры расположены далеко, на значительном радиусе от оси колеса, достигается уменьшение массы вращающихся элементов, а также увеличение объема доступного с торцевой стороны пространства, в котором можно разместить аккумуляторы, электронную аппаратуру управления и датчики момента.
Предусмотрено применение электродвигателя с электрической коммутацией, имеющего высокий эффективный крутящий момент и малую скорость вращения, что позволяет отказаться от использования редуктора. Благодаря этому колесо на режиме свободного хода испытывает меньшее сопротивление трения. Электродвигатель задействуется только на стадиях ускорения либо торможения. При отказе электроники или при разряде аккумулятора колесное транспортное средство ведет себя как обычное передвижное кресло-коляска с ручным приводом.
Аналоговый сигнал от датчика момента характеризует задающее воздействие для управления электродвигателем. Аппаратура управления, имеющая микропроцессорную базу, посредством чувствительных элементов измеряет параметры положения ротора относительно статора. Электронное устройство задания мощности таким образом изменяет магнитное поле статора, приводя его в соответствие с положением ротора, что электродвигатель передает на колесо соответствующий крутящий момент для разгона или торможения колеса. Путем соответствующего электронного переключения часть теряемой при торможении энергии можно использовать для подзарядки аккумулятора. Степень усиления момента может задаваться пользователем транспортного средства с использованием соответствующих органов регулировки.
Предпочтительно применяется аккумулятор, состоящий из сменных никель-кадмиевых или металлогидридных аккумуляторных элементов. Таким образом, корпус аккумулятора может быть конструктивно оформлен так, чтобы занимать отведенное под него пространство с геометрическим замыканием, при этом в зависимости от объема располагаемого пространства можно получить более высокую емкость аккумулятора. С целью облегчения замены аккумулятора для его включения в цепь предусмотрено быстроразъемное соединение. Для индикации степени заряженности аккумулятора в него предпочтительно встроен соответствующий указатель.
В первом варианте исполнения датчика момента предложенный в изобретении принцип измерения основывается на ослаблении светового луча. Внешне измеряемый момент проявляется в небольшом повороте относительно друг друга кольцевых дисков, соединенных друг с другом посредством упругого элемента, допускающего такой поворот. За счет перекрытия светлых и темных участков ослабление света в пределах ширины некоторого сектора пропорционально углу поворота кольцевых дисков относительно друг друга. Таким образом, момент можно считывать бесконтактным способом, чувствительный элемент передает сигнал величины момента в неподвижную электронную аппаратуру даже при вращении колеса. При этом не требуется передавать электрические сигналы с вращающегося кольца в неподвижную электронную аппаратуру через ненадежные контактные кольца.
Два других альтернативных решения конструкции датчика момента для передачи моментов обладают надежной кинематикой и поэтому являются особенно отказобезопасными.
Другие преимущества изобретения раскрываются в описании вариантов его осуществления.
В качестве примеров осуществления изобретения на чертеже представлены три его варианта, при этом:
на фиг.1 приведен поперечный разрез правого заднего ведущего колеса передвижного кресла-коляски;
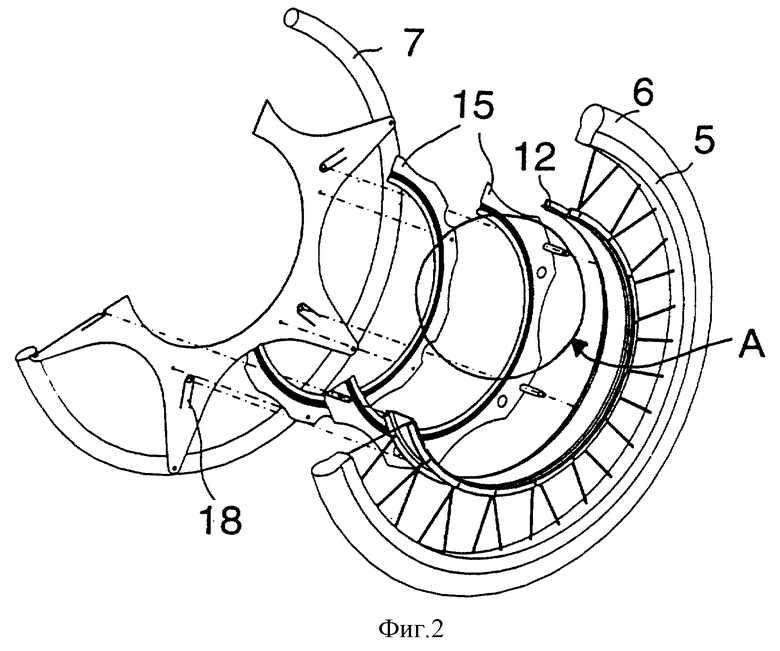
на фиг. 2 приведено объемное изображение датчика момента с пространственным разделением его деталей, выполненное в уменьшенном по отношению к фиг.1 масштабе;
на фиг.3 приведено местное объемное изображение датчика момента, выполненное в увеличенном по отношению к фиг.2 масштабе;
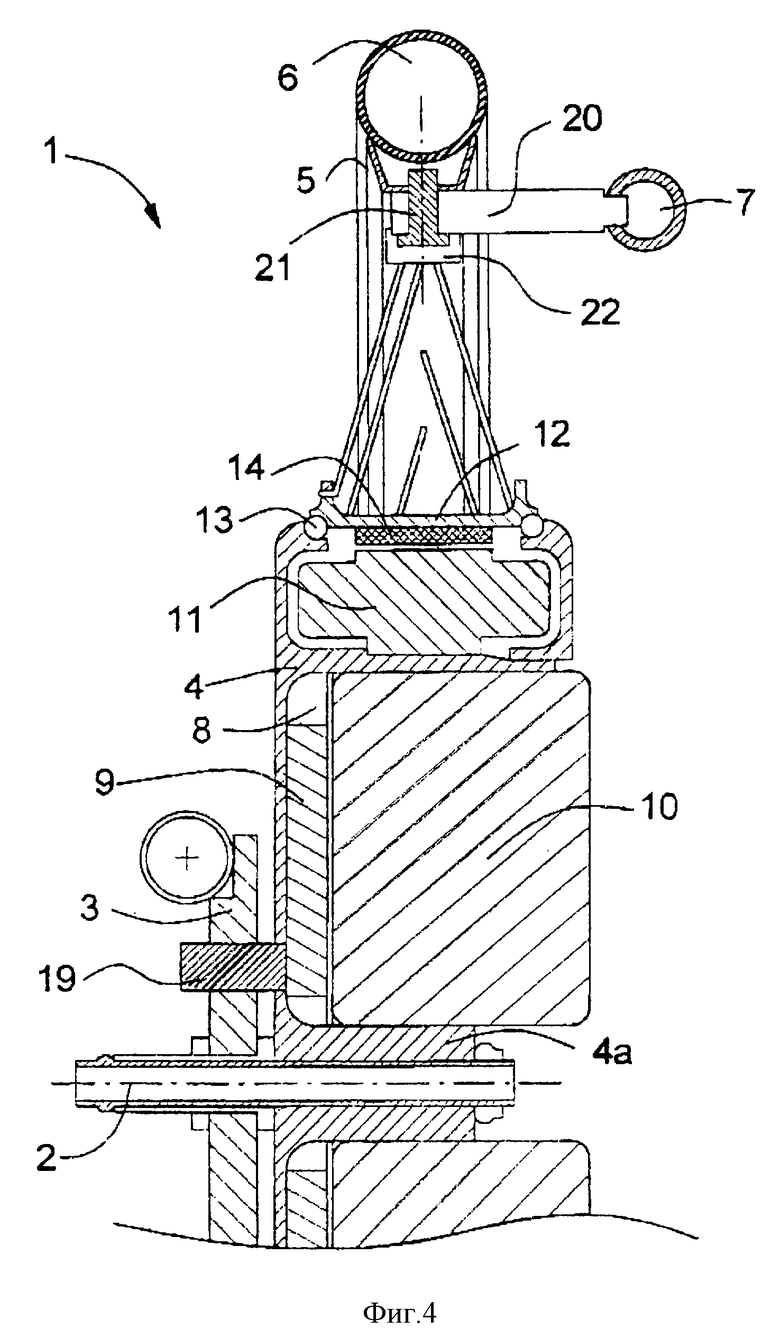
на фиг. 4 в представлении, аналогичном фиг.1, изображен вариант изобретения, видоизмененный в части, касающейся датчика момента;
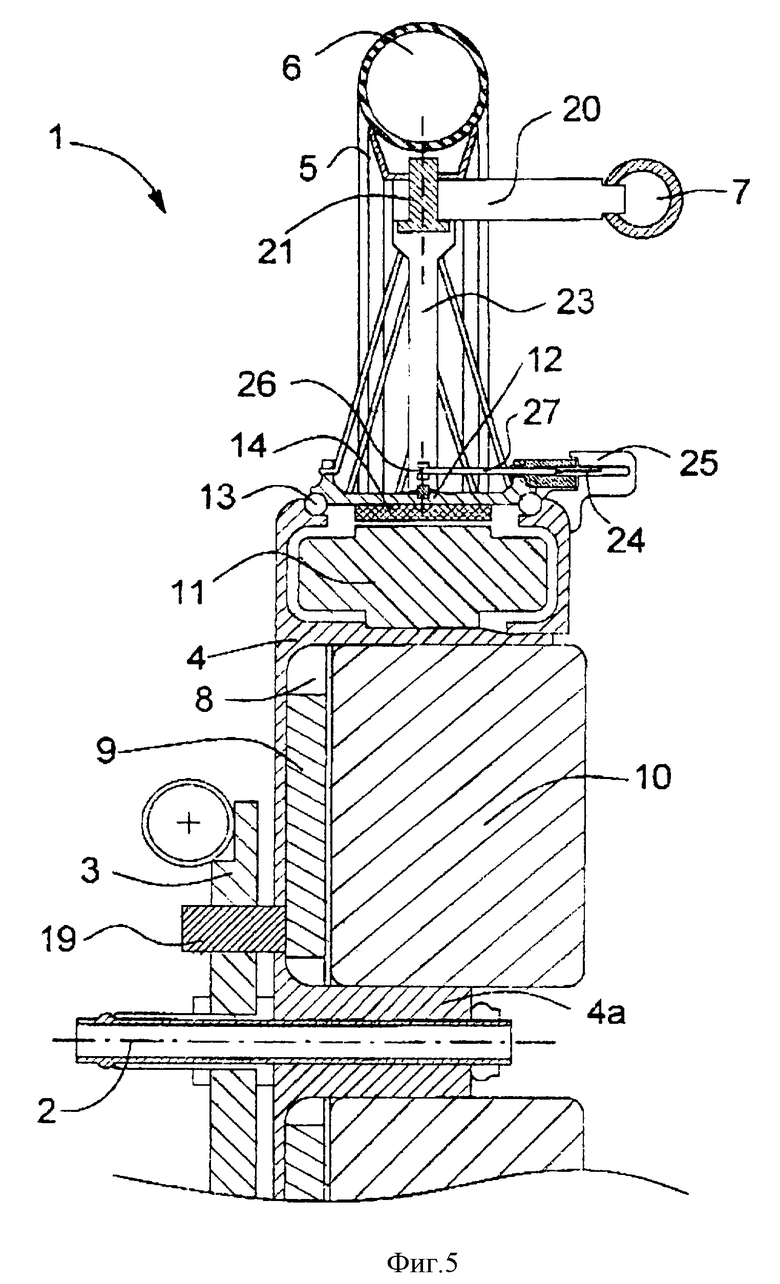
на фиг.5 в представлении, аналогичном фиг.4, изображен еще один вариант изобретения, видоизмененный в части, касающейся датчика момента.
На фиг. 1 показано ведущее колесо 1, соединенное исключительно механически посредством быстроразъемного соединения 2 с рамой 3 колесного транспортного средства, в частности передвижного кресла-коляски, которое здесь более подробно не представлено. Неподвижный узел 4 крепления колеса зафиксирован от поворота относительно рамы 3 колесного транспортного средства посредством стопора 19. В ведущее колесо 1 встроен безредукторный электродвигатель с внешним ротором, который расположен между неподвижным узлом 4 крепления колеса и вращающимися функциональными элементами конструкции, в число которых входит силовой обод 5 с установленной на него пневматической шиной 6, а также обод 7 ручного привода, предназначенный для передачи на колесо крутящего момента руками.
Внутри неподвижного узла 4 крепления колеса образована кольцевая полость 8, расположенная концентрически вокруг ступичной части 4а узла 4 крепления колеса. В этой полости размещены аппаратура 9 управления электродвигателем, а также аккумулятор 10, являющийся источником энергии для электродвигателя с внешним ротором. На кольцевой стенке узла 4 крепления колеса, ограничивающей кольцевую полость 8 снаружи, закреплен статор 11 электродвигателя с внешним ротором, несущий статорную обмотку. Кроме того, по внешней окружности узла 4 крепления колеса на подшипнике установлено роторное кольцо 12, которое охватывает снаружи статор 11, опирается посредством шарикоподшипника 13 на кольцевые стойки узла 4 крепления колеса и на своей внутренней поверхности имеет магниты 14 внешнего ротора, обращенные к обмотке статора 11 и отделенные от нее небольшим зазором.
К внешней поверхности роторного кольца 12 крепятся вращающиеся вместе с роторным кольцом 12 функциональные элементы 5, 6, 7 конструкции колеса. Аппаратура 9 управления по сигналам от оптического датчика момента определяет значение крутящего момента, передаваемого руками на обод 7 ручного привода. Этот датчик момента имеет два расположенных на одной оси и на осевом расстоянии друг от друга кольцевых диска 15, имеющих чередующиеся светлые и темные участки 17 равной ширины, на которые падает световой луч 16, направленный параллельно оси дисков, и соединенных с ободом 7 ручного привода или с роторным кольцом 12, а также между собой посредством крутильной пружины 18. При этом ослабление светового луча, выраженное аналоговым сигналом, характеризует задающее воздействие для управления электродвигателем с внешним ротором.
В видоизмененном варианте осуществления изобретения, представленном на фиг. 4, обод 7 ручного привода посредством листовых пружин 20 соединен с валиком 21, который закреплен в силовом ободе 5 с возможностью поворота относительно сельсина-датчика 22 и вокруг своей оси, расположенной перпендикулярно оси колеса. Сельсин-датчик 22 преобразует поворот валика 21, происходящий вследствие передачи руками крутящего момента на обод 7 ручного привода, в электрический сигнал, посылаемый в аппаратуру 9 управления электродвигателем. При этом угол поворота валика 21 зависит от величины приложенного крутящего момента и постоянной упругости листовых пружин 20. Выработанный датчиком-сельсином 22 сигнал может передаваться с вращающейся части колеса в аппаратуру 9 управления электродвигателем, расположенную в невращающейся части колеса, оптически или по радио.
В показанном на фиг.5 варианте осуществления изобретения обод 7 ручного привода посредством листовых пружин 20 соединен с валом 23, который закреплен в силовом ободе 5 с возможностью поворота и кинематически связан со сдвижным кольцом 24 таким образом, что поворот вала 23 вследствие приложения руками крутящего момента к ободу 7 ручного привода приводит к смещению сдвижного кольца 24 параллельно оси колеса и, в частности, относительно чувствительного элемента 25, на узле 4 крепления колеса, снаружи его внешнего радиуса. Чувствительный элемент 25 преобразует ход сдвижного кольца 24 в электрический сигнал, направляемый в аппаратуру 9 управления электродвигателем.
Вал 23, ориентированный перпендикулярно оси колеса, кинематически связан со сдвижным кольцом 24 посредством рычага 26, шарнирно присоединенного к валу 23 и расположенного перпендикулярно ему. К внешнему концу этого рычага с возможностью поворота присоединена толкательная штанга 27, которая своим другим концом сочленена с упомянутым сдвижным кольцом 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ, ПРИВОДИМОЕ В ДЕЙСТВИЕ МОТОРОМ | 1998 |
|
RU2201367C2 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ПРИСПОСОБЛЕНИЙ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ | 1998 |
|
RU2185987C2 |
| БЕСШАРНИРНАЯ ГОЛЕНОСТОПНАЯ ЧАСТЬ НОЖНОГО ПРОТЕЗА | 1996 |
|
RU2151578C1 |
| УПРУГИЙ ВКЛАДЫШ ИСКУССТВЕННОЙ СТОПЫ | 1998 |
|
RU2192811C2 |
| ОРТОПЕДИЧЕСКИЙ ШАРНИР | 1998 |
|
RU2193372C2 |
| ОРТЕЗ ГИПЕРВЫТЯЖЕНИЯ | 1996 |
|
RU2140231C1 |
| УПРУГИЙ ВКЛАДЫШ СТОПЫ | 1998 |
|
RU2184508C2 |
| ВКЛАДЫШ ДЛЯ ИСКУССТВЕННОЙ СТОПЫ | 1999 |
|
RU2220684C2 |
| БЕССУСТАВНАЯ ИСКУССТВЕННАЯ СТОПА | 1997 |
|
RU2168962C2 |
| АККУМУЛЯТОР | 1991 |
|
RU2027256C1 |

Изобретение относится к транспортному средству, приводимому в движение мышечной силой, в частности к креслам-коляскам. Колесное транспортное средство содержит электродвигатель, встроенный в ведущее колесо, обеспечивающий передачу дополнительного крутящего момента, управляемую посредством аппаратуры управления. Ведущее колесо также снабжено ободом ручного привода. Имеется датчик момента, который соединен с аппаратурой управления электродвигателем, выходной сигнал которого характеризует значение крутящего момента, прилагаемого вручную к ободу ручного привода. В результате упрощается управление транспортным средством. 4 з.п. ф-лы, 5 ил.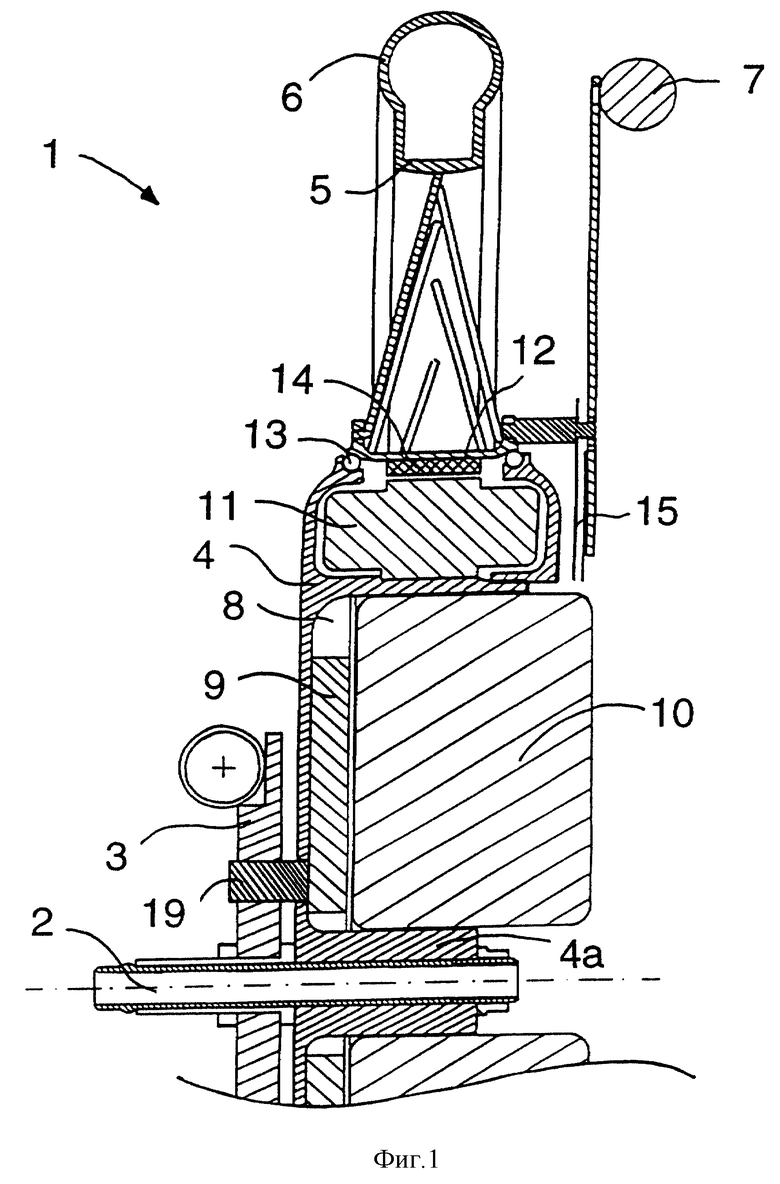
| US 5427193 А | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| МОТОР-КОЛЕСО-ГЕНЕРАТОР | 1991 |
|
RU2026203C1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035115C1 |
| МОТОР-КОЛЕСО | 1992 |
|
RU2094242C1 |
| DE 4129351 А1, 27.05.1993 | |||
| US 3548965 A, 22.12.1970. | |||

