Способ предназначен для использования на электрифицированном транспорте для измерения высоты контактного провода относительно головки рельса.
Измерение этого параметра необходимо для текущего контроля на соответствие нормативным показателям, установленным в [1, стр. 57-111].
На электрифицированных железных дорогах осуществляется контроль за положением контактного провода относительно оси пути. Провод должен находиться в определенных точках пространства, которые установлены существующими нормами. Измерение положения провода достаточно трудоемко и его осуществляют с помощью специальных вагонов-лабораторий, включаемых в состав движущегося поезда.
До недавнего времени для подобного рода измерений высоты контактного провода использовались механические контактные системы [2, стр. 15-23]. Такие системы имеют небольшую точность, не допускают измерения при высоких скоростях движения, поэтому в настоящее время для указанной цели используются телевизионные системы.
Известны устройства для наблюдения за исследуемым объектом, состоящие из видеокамеры и устройства обработки видеоизображения, с помощью которых тем или иным способом дается оценка исследуемому объекту.
Наиболее сложным в этом техническом решении является способ обработки визуального изображения с получением достоверных данных о его координатах на фоне (в присутствии) большого числа помех, в том числе и от других объектов, которые попадают в поле обзора.
Известен способ выделения линии при компьютерной обработке изображения объекта [3, стр. 256-267, 284-288]. Здесь рассматривается способ выделения контурного изображения предмета на основе анализа информации о светлых и темных участках изображения. Далее выделенный контур используется для распознавания предмета. Затем определяются координаты положения предмета в пространстве. При этом цвет фона предполагается известным и постоянным. Способ состоит из двух стратегий: 1) стратегии поиска, 2) стратегии прослеживания. Стратегия поиска позволяет на основе рассмотрения 16 точек растра найти граничную точку объекта. Затем с помощью стратегии прослеживания выделяется граница объекта. В результате этого сцена интерпретируется как набор объектов, для каждого из которых известны такие признаки, как цвет, координаты каждой точки границы, очерчивающей этот объект, и общее количество точек.
Недостатком такого способа является невозможность его использования на электрифицированных железных дорогах для автоматизированного измерения положения контактных проводов, так как цвет и яркость окружающего фона при движении транспортного средства не являются постоянными, а рассмотренный способ предполагает постоянство фона. Кроме того, при прослеживании объектов, кроме контактного провода в поле зрения на железной дороге, попадают различные многочисленные детали контактной сети (консоли, изоляторы, струнки, питающие провода), которые мешают измерению высоты контактного провода.
Известен также способ, основанный на сегментации изображений на элементы и на сравнении результатов анализа изображений с динамическими моделями изменений геометрии краев дороги [4, стр. 254-255].
Однако этот способ имеет следующие недостатки:
- сложность системы, так как используются две телекамеры: одна для создания изображения всего анализируемого участка, а другая для создания укрупненного изображения выбранного окна;
- необходимость использования нескольких микропроцессоров для обработки изображений;
- сложность задач совместного анализа последовательности изображений, поступающих с одной или нескольких камер [4, стр. 255];
- необходимость сравнения результатов анализа с динамическими моделями геометрии краев дороги;
Известен также способ оптического измерения высоты контактного провода относительно головки рельса, основанный на использовании стереотелевизионной системы [5, стр. 22-28], который принят в качестве прототипа. Данное устройство состоит из блока оптической системы, трех линейных телевизионных камер на основе линейки из 2048 элементов с зарядовой связью и вычислительного устройства. Блок оптической системы предназначен для установки и фиксации телевизионных камер в плоскости, перпендикулярной оси пути, причем камера, расположенная в центре, направлена вертикально вверх, а две другие камеры расположены симметрично относительно центральной на расстоянии S, равном 1,2 м, а оптические оси этих камер наклонены к оптической оси центральной камеры под углом примерно равным 70o.
Недостатками известного решения являются:
- сложность, так как необходимо устанавливать три телекамеры;
- низкая помехоустойчивость, возникающая из-за того, что используются линейные телекамеры (линейка фотодиодов), которые просматривают лишь узкую линию в пространстве предметов, в результате ложные объекты (деревья, металлоконструкции и др.) могут быть приняты за провод и исказить измерения.
Целью изобретения является упрощение и повышение помехоустойчивости при измерении высоты контактного провода относительно головки рельса из движущегося транспортного средства.
Сущность изобретения заключается в следующем. На транспортном средстве с токоприемником используют одну видеокамеру с объективом и устанавливают ее так, что оптическая ось объектива располагается в плоскости, которая проходит вдоль оси пути перпендикулярно его поверхности и направлена в сторону поднятого токоприемника, прижимающегося своим полозом к контактному проводу, так чтобы изображение полоза токоприемника и контактного провода при всех их нормативных положениях по вертикали и горизонтали не выходило из поля зрения объектива.
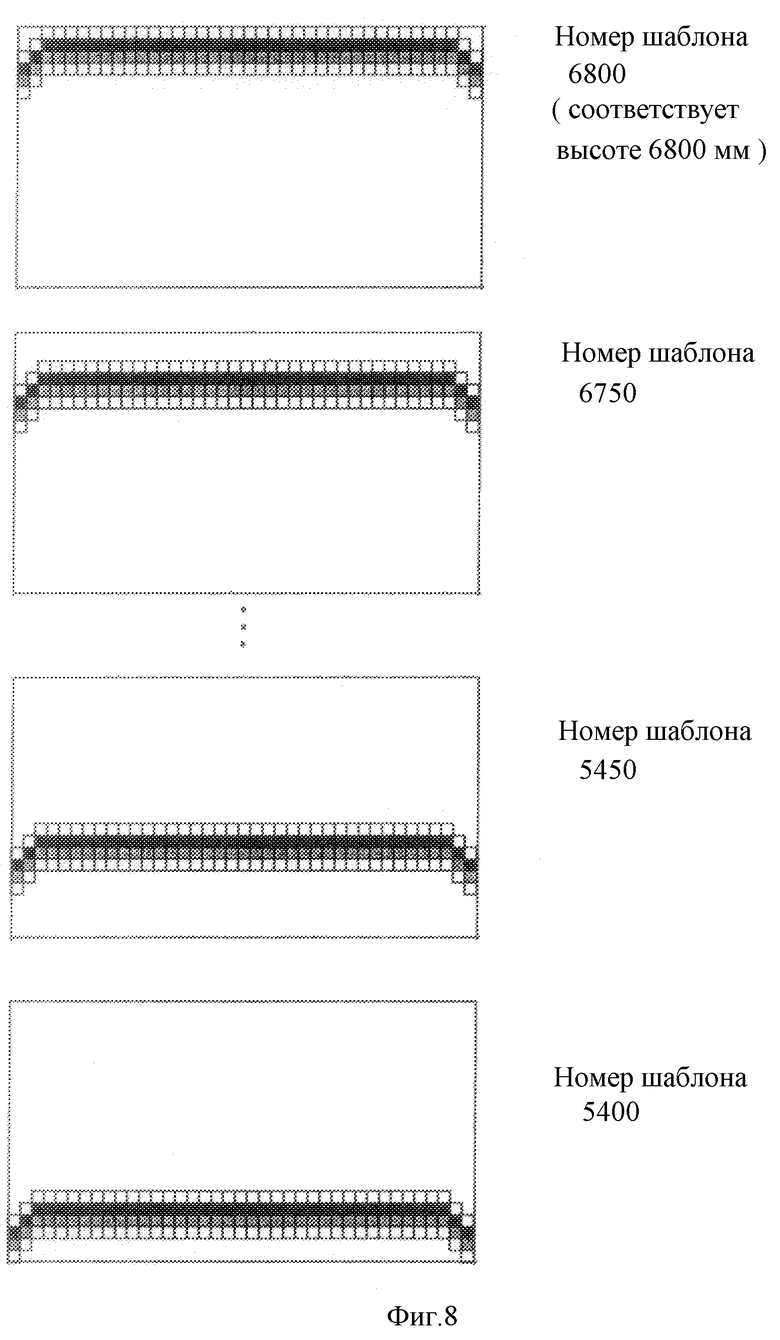
Заготавливают наборы шаблонов контурных изображений полоза токоприемника для различных высот расположения контактного провода от уровня головки рельса в диапазоне от максимально допустимого значения до минимально допустимого значения. Каждому шаблону контурного изображения полоза токоприемника присваивается свой номер, который соответствует определенной высоте расположения от контактного провода до уровня головки рельса.
На полученное изображение накладывают матрицу (сетку) из отдельных ячеек.
Осуществляют сравнение значения яркости каждой текущей ячейки со значением яркости последующей ячейки и определяют величину разностей значений этих яркостей и знаков этих разностей.
Ячейке, для которой разность яркостей по отношению к предыдущей превышает заданное значение и имеет положительный знак присваивается первый код (например, черный цвет), ячейке, для которой разность яркостей по отношению к предыдущей превышает заданное значение и имеет отрицательный знак присваивается второй код (например, серый цвет), остальным ячейкам присваивается третий код (например, белый цвет), при этом расположенные рядом (без пропусков) ячейки с первым кодом образуют в указанной матрице одну границу контурного изображения объекта, а расположенные рядом ячейки со вторым кодом образуют вторую границу контурного изображения объекта.
Исключают объекты, верхняя и нижняя границы контурных изображений которых не достигают правой и левой границ прямоугольной плоскости изображения.
Полученное контурное изображение оставшихся объектов сравнивают поочередно с набором шаблонов контурных изображений полоза токоприемника путем последовательного наложения шаблонов на контурное изображение объектов и подсчета числа совпавших по цвету ячеек контурного изображения полоза и шаблона. Определяют высоту контактного провода по номеру того шаблона, для которых разность этих чисел минимальна.
Предлагаемый способ позволяет упростить измерение высоты контактного провода, так как вместо стереотелевизионной системы из трех линейных оптических камер используется одна стандартная видеокамера. Данный способ повышает помехоустойчивость при измерениях высоты, так как вместо просмотра узкой линии (у прототипа) в предлагаемом способе просматривается и анализируется поле в пространстве предметов, что позволяет по наличию указанных признаков исключить помехи.
Предлагаемый способ поясняется на фиг.1-8.
На фиг. 1 схематично показано: транспортное средство 1, видеокамера с системой обработки видеоизображений 2, контактный провод 3, полоз токоприемника 4. Видеокамера установлена так, что контактный провод 3 и полоз токоприемника 4 попадают в ее поле обзора, ограниченное линиями 5. При движении транспортного средства в поле обзора видеокамеры 2 попадают также опоры 6, изоляторы 7, несущий трос 8, облака 9 и другие объекты, которые являются помехами.
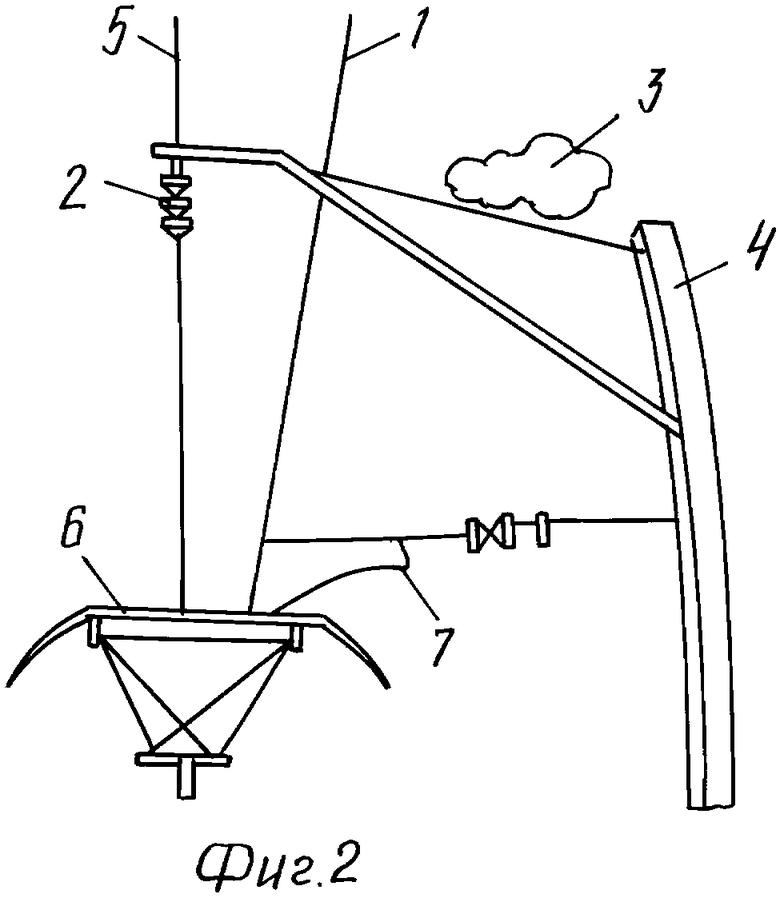
На фиг. 2 показано изображение, полученное с помощью видеокамеры, установленной в вышке вагона-лаборатории. Здесь: 1 - изображение контактного провода, 2 - изображение изолятора, 3 - изображение облака, 4 - изображение опоры, 5 - изображение фона, 6 - изображение полоза токоприемника, 7 - изображение фиксатора и его изолятора.
На фиг.3 показано для примера упрощенное изображение одного из видеокадров, формируемых видеокамерой в ее фокальной плоскости. Здесь: 1 - изображение контактного провода, 2 - изображение полоза токоприемника, 3 - изображение облака.
На фиг. 4 показана сетка для сегментации изображения видеокадра виде матрицы ячеек.
На фиг. 5 показано матричное изображение, у которого отдельные участки (ячейки), имеют различную яркость и соответствуют прямоугольной плоскости видеоизображения, создаваемой видеокамерой. Здесь: 1 - изображение контактного провода, 2 - изображение полоза токоприемника, 3 - изображение облака, 4 - изображение фона.
На фиг. 6 показано контурное изображение объектов. Здесь: 1 - верхняя граница объекта (участки матрицы, закрашенные черным цветом), 2 - нижняя граница объекта (участки матрицы, закрашенные серым цветом).
На фиг.7 показан результат исключения (отфильтровывания) объектов, контурное изображение которых не достигает левой и правой границ прямоугольной плоскости изображения.
На фиг. 8 показаны образцы из набора матричных шаблонов контурных изображений полоза токоприемника для различной высоты контактного провода. Эти образцы отличаются друг от друга тем, что при различной высоте контактного провода шаблон контурного изображения полоза токоприемника занимает различное местоположение в прямоугольной рамке.
Данный способ реализован с помощью микропроцессорной техники, его работоспособность подтверждается актом испытаний.
Предлагаемый способ позволяет упростить измерение высоты контактного провода и повысить помехоустойчивость при измерениях высоты контактного провода.
ЛИТЕРАТУРА
1. Инструктивные указания по регулировке контактной сети. М.: Трансиздат, 1998.
2. Борц Ю.В., Чекулаев В.Е., Контактная сеть. Иллюстрированное пособие. М.: Транспорт, 1981.
3. Интегральные роботы. Сборник статей. Выпуск 2. Перевод с английского и японского. Под редакцией Г.Е. Поздняка. М.: "Мир", 1975.
4. Техническое зрение роботов. В.И. Мошкин, А.А. Петров, B.C. Титов, Ю. Г. Якушенков. Под общ. ред. Ю.Г. Якушенкова. М.: Машиностроение, 1990.
5. Вагон-лаборатория нового поколения для испытаний контактной сети. В. П. Герасимов, А.В. Пешин, Ю.М. Федоришин, Научно-исследовательский институт электрофизической аппаратуры, Н.А. Бондарев, ЦЭ МПС РФ. Железные дороги мира - 1998, 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ЗИГЗАГА КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2167773C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ЗИГЗАГА КОНТАКТНОГО ПРОВОДА | 2000 |
|
RU2180622C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ ИЗОЛЯЦИИ НА КОНТАКТНОЙ СЕТИ | 2000 |
|
RU2187438C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ЗИГЗАГА КОНТАКТНОГО ПРОВОДА | 1994 |
|
RU2089410C1 |
| Способ обнаружения нагревающихся соединений проводов | 1985 |
|
SU1275331A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ ОДНОФАЗНОГО ЗАМЫКАНИЯ В ТРЕХФАЗНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2003 |
|
RU2249226C2 |
| СИГНАЛИЗАТОР ОПАСНОГО ПРИБЛИЖЕНИЯ К ВЫСОКОВОЛЬТНЫМ УСТАНОВКАМ | 2011 |
|
RU2496202C2 |
| Устройство для измерения износа контактного провода | 1980 |
|
SU921900A1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ КАЧЕСТВА ВЗАИМОДЕЙСТВИЯ КОНТАКТНОЙ ПОДВЕСКИ И ТОКОПРИЕМНИКОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249511C2 |
| Устройство для регистрации искренияТОКОпРиЕМНиКА | 1979 |
|
SU815501A1 |





Способ предназначен для использования на электрифицированном транспорте для измерения высоты контактного провода относительно головки рельса. Сущность способа оптического измерения высоты контактного провода с помощью видеокамеры, устанавливаемой на транспортном средстве с токоприемником, заключается в том, что видеокамеру устанавливают так, что оптическая ось объектива располагается в плоскости, которая проходит вдоль оси пути перпендикулярно его поверхности и направлена в сторону поднятого токоприемника, прижимающегося своим полозом к контактному проводу так, чтобы изображение полоза токоприемника и контактного провода при всех их нормативных положениях по вертикали и горизонтали не выходило из поля зрения объектива. Заготавливают наборы шаблонов контурных изображений полоза токоприемника для различных высот расположения контактного провода от уровня головки рельса в диапазоне от максимально допустимого значения до минимально допустимого значения, причем каждому шаблону контурного изображения полоза токоприемника присваивают свой номер, который соответствует определенной высоте расположения от контактного провода до уровня головки рельса. Фиксируют изображение полоза токоприемника с контактным проводом, получаемое в фокальной плоскости объектива. На полученное изображение накладывают матрицу (сетку) из отдельных ячеек, последовательно осуществляют сравнение значения яркости каждой текущей ячейки со значением яркости последующей ячейки и определяют величину разностей значений этих яркостей и знаков этих разностей, при этом расположенные рядом ячейки с первым кодом образуют в указанной матрице одну границу контурного изображения объекта, а расположенные рядом ячейки со вторым кодом образуют вторую границу контурного изображения объекта. Исключают объекты, верхняя и нижняя границы которых не достигают правой и левой границ прямоугольной плоскости изображения. Полученное контурное изображение объектов сравнивают поочередно с набором шаблонов контурных изображений полоза токоприемника путем последовательного наложения шаблонов на контурное изображение объектов и подсчета числа совпавших по коду выделенных ячеек контурного изображения полоза и шаблона и определяют высоту контактного провода по номеру того шаблона, для которого разность этих чисел минимальна. Технический результат - упрощение и повышение помехоустойчивости при измерении высоты контактного провода относительно головки рельса из движущегося транспортного средства. 8 ил.
Способ оптического измерения высоты контактного провода с помощью видеокамеры, устанавливаемой на транспортном средстве с токоприемником, отличающийся тем, что видеокамеру устанавливают так, что оптическая ось объектива располагается в плоскости, которая проходит вдоль оси пути перпендикулярно его поверхности и направлена в сторону поднятого токоприемника, прижимающегося своим полозом к контактному проводу так, чтобы изображение полоза токоприемника и контактного провода при всех их нормативных положениях по вертикали и горизонтали не выходило из поля зрения объектива, заготавливают наборы шаблонов контурных изображений полоза токоприемника для различных высот расположения контактного провода от уровня головки рельса в диапазоне от максимально допустимого значения до минимально допустимого значения, причем каждому шаблону контурного изображения полоза токоприемника присваивают свой номер, который соответствует определенной высоте расположения от контактного провода до уровня головки рельса, фиксируют изображение полоза токоприемника с контактным проводом, получаемое в фокальной плоскости объектива, на полученное изображение накладывают матрицу (сетку) из отдельных ячеек, последовательно осуществляют сравнение значения яркости каждой текущей ячейки со значением яркости последующей ячейки и определяют величину разностей значений этих яркостей и знаков этих разностей ячейке, для которой разность яркостей по отношению к предыдущей превышает заданное значение и имеет положительный знак, присваивается первый код (например, черный цвет), ячейке, для которой разность яркостей по отношению к предыдущей превышает заданное значение и имеет отрицательный знак, присваивается второй код (например, серый цвет), остальным ячейкам присваивается третий код (например, белый цвет), при этом расположенные рядом (без пропусков) ячейки с первым кодом образуют в указанной матрице одну границу контурного изображения объекта, а расположенные рядом ячейки со вторым кодом образуют вторую границу контурного изображения объекта, исключают объекты, верхняя и нижняя границы которых не достигают правой и левой границ прямоугольной плоскости изображения, полученное контурное изображение объектов сравнивают поочередно с набором шаблонов контурных изображений полоза токоприемника путем последовательного наложения шаблонов на контурное изображение объектов и подсчета числа совпавших по коду выделенных ячеек контурного изображения полоза и шаблона, и определяют высоту контактного провода по номеру того шаблона, для которого разность этих чисел минимальна.
| RU 94021370 А1, 27.06.1996 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗНОСА КОНТАКТНОГО ПРОВОДА | 1996 |
|
RU2138410C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ КОНТРОЛЯ КАЧЕСТВА ИЗОБРАЖЕНИЙ | 1992 |
|
RU2109341C1 |
| 0 |
|
SU281725A1 | |
| АВТОКОЛЛИМАЦИОННЫЙ НУТРОМЕР | 0 |
|
SU194331A1 |
