Изобретение относится к области вычислительной техники, в частности к конструкции устройств для ввода буквенно-цифровой и символьной информации в персональные электронно-вычислительные машины.
Известна клавиатура персональных электронно-вычислительных машин для ввода информации, содержащие смонтированные в корпусе функциональные и управляющие клавиши, а также "знаковый" манипулятор с клавишами для ввода букв, цифр и символов (см. RU 2088964, 6 G 06 F 3/02).
Данная клавиатура позволяет поддерживать с помощью "знакового" манипулятора достаточно высокую скорость ввода данных при условии приобретения хорошего навыка в пользовании многофункциональным манипулятором.
Однако эта клавиатура не позволяет использовать прогрессивный "слепой" десятипальцевый метод ввода информации, поскольку в ней отсутствует четкая естественная "привязка" каждого пальца к своей зоне "обслуживания" клавиш, что неизбежно приводит к появлению большого количества ошибок. Кроме того, обучиться эффективно работать на такой клавиатуре достаточно сложно.
Известна стандартная клавиатура IBM персональных электронно-вычислительных машин для ввода информации, содержащая смонтированные в корпусе узлы ввода (клавиши) букв, цифр и символов (см. , например, каталог CHERRI "Клавиатуры", стр. 10).
Данная клавиатура принята автором за прототип, так как она в какой-то мере позволяет использовать при печати прогрессивный "слепой" десятипальцевый метод ввода информации.
Эта клавиатура, несмотря на широкое распространение, все же не достаточно удобна при использовании "слепого" десятипальцевого метода ввода информации, поскольку в ней отсутствует четкая "привязка" каждого пальца к своей зоне "обслуживания", что неизбежно приводит к появлению ошибок.
Таким образом, техническим результатом заявленного изобретения является повышение производительности труда и снижение количества ошибок оператора, уменьшение габаритов устройств данной функциональной группы, при сохранении функциональных возможностей и сохранении оператором общепринятой техники слепой десятипальцевой печати при вводе буквенно-цифровой информации.
Указанный технический результат достигается за счет того, что в корпусе устройства для ввода буквенной и символьной информации смонтированы узлы ввода букв и символов, клавиши переключения регистров, выполненные с возможностью изменения набора букв и символов, соответствующему каждому упомянутому узлу ввода, при этом число упомянутых узлов ввода соответствует числу пальцев правой и левой рук, за исключением больших пальцев рук, каждый палец предназначен для обслуживания одного узла ввода букв, цифр и символов, каждый из упомянутых узлов ввода выполнен в виде тела вращения и датчика перемещения, предназначенного для регистрации направления перемещения тела вращения, при этом указанный узел ввода под мизинец левой руки предназначен для ввода следующих букв: А/Ф, Q/Й, Z/Я; указанный узел ввода под безымянный палец левой руки предназначен для ввода следующих букв: S/Ы, W/Ц, Х/Ч; указанный узел ввода под средний палец левой предназначен для ввода следующих букв: D/B, Е/У, С/С; указанный узел ввода под указательный палец левой руки предназначен для ввода следующих букв: F/A, R/K, V/M, Т/Е, G/П, В/И; указанный узел ввода под указательный палец правой руки предназначен для ввода следующих букв: J/O, U/T, М/Ь, Y/H, H/P, N/T; указанный узел ввода под средний палец правой предназначен для ввода следующих букв и символов: К/Л, I/Ш, </Б; указанный узел ввода под безымянный палец правой предназначен для ввода следующих букв и символов: L/Д, O/Щ, >/Ю; указанный узел ввода под мизинец правой руки предназначен для ввода следующих букв и символов::/Ж, Р/З, ?/, {/X, "/Э,}/Ъ.
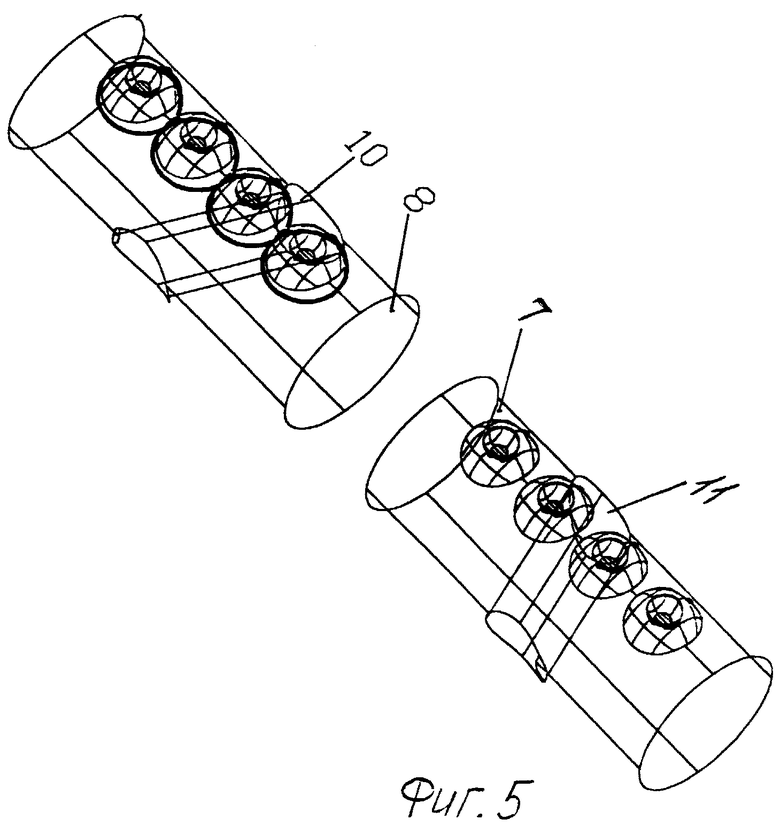
В частном варианте выполнения заявленного изобретения упомянутые тела вращения являются сферой, корпус выполнен цилиндрической формы или в виде двух полуцилиндров, соединенных шарниром или в виде двух автономных частей под правую и левую руки, причем автономные части могут иметь форму цилиндров с вырезами для их фиксации на руках оператора.
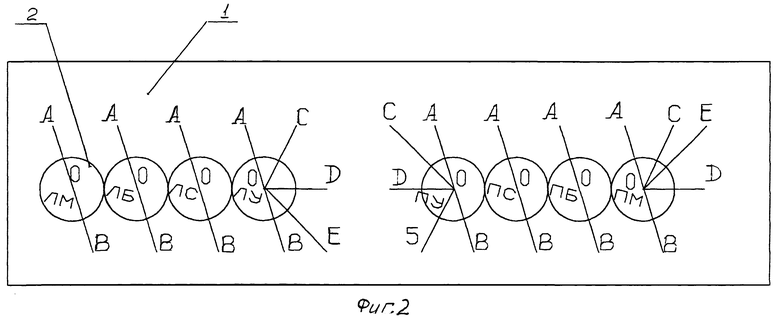
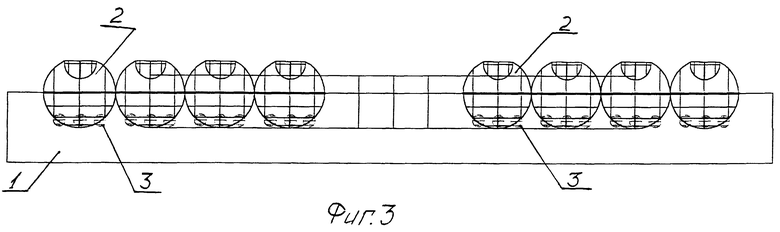
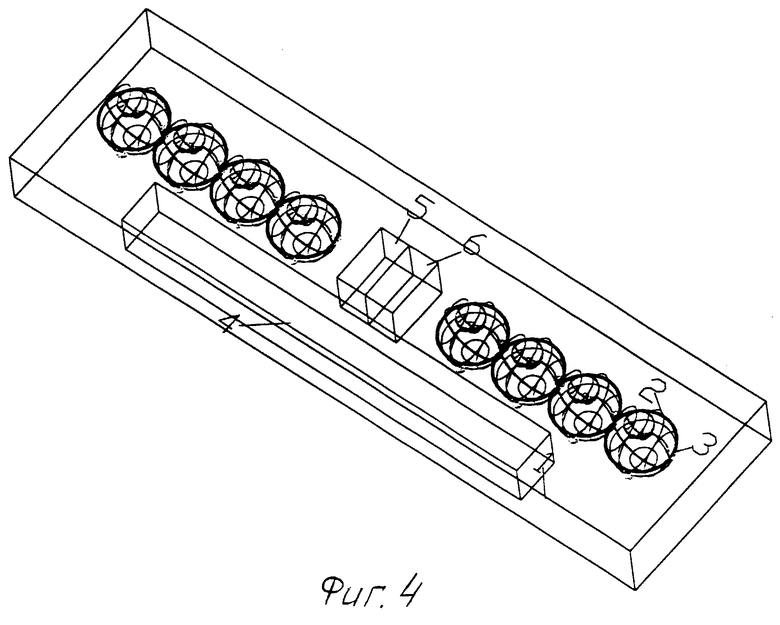
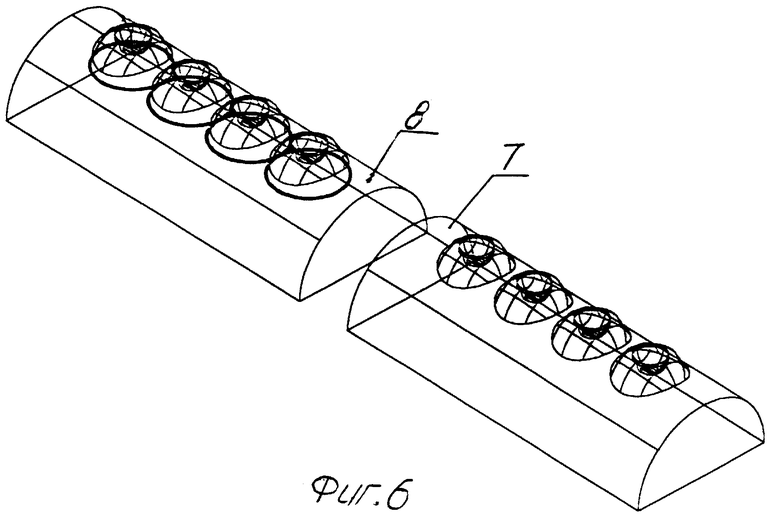
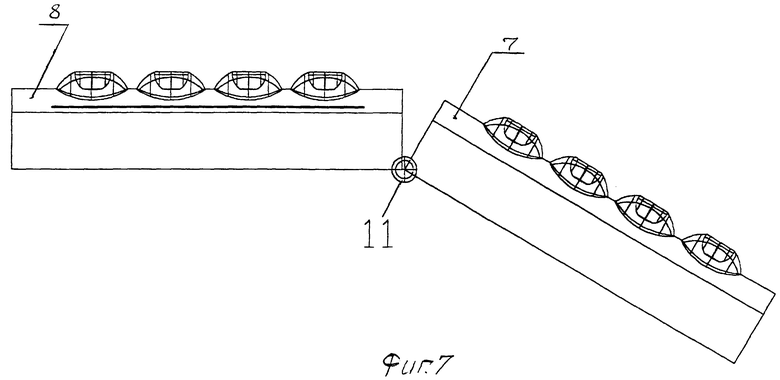
Сущность изобретения поясняется чертежами на фиг.1-7, где на фиг.1 представлен общий вид заявленного устройства; на фиг.2 - вид сверху устройства ввода с допустимыми направлениями перемещения манипуляторов и точками ввода информации; на фиг. 3 - вид спереди устройства ввода; на фиг.4 - общий вид устройства ввода с клавишами переключения регистров: клавишами пробела и переключения в режим ввода латинских и русских букв и режим ввода строчных и прописных букв; на фиг.5 - вариант устройства ввода, приспособленного под правую и левую руки; на фиг.6 - вариант устройства ввода, в котором корпус выполнен в виде двух полуцилиндров; на фиг.7 - вариант устройства ввода с полуцилиндрами, соединенными посредством шарнира.
Устройство содержит корпус 1, в котором смонтированы восемь узлов ввода букв и символов 2, выполненных в виде тел вращения, например сфер, взаимодействующих с датчиками перемещений 3, клавиша пробела 4 и клавиши переключения на режим ввода русских и латинских букв и символов и режим ввода строчных и прописных букв 5 и 6.
Заявленное устройство может быть выполнено в виде двух автономных частей 7 и 8 с вырезами 10 и 11 для фиксации на руках оператора и шарниром 12, позволяющим их связывать.
На фиг.2 приняты следующие обозначения: М - мизинец, Б - большой палец, С - средний палец, У - указательный палец, Л - левая, П - правая рука. Значащие точки для каждого узла ввода обозначены латинскими буквами А, В, С, D, Е, О. Линии между значащими точками соответствуют траектории движения концов пальцев оператора.
Для ввода букв и символов в компьютер оператор вращает в определенных направлениях соответствующие узлы ввода. Так, например, для ввода буквы латинской буквы А оператор вращает тело вращения, например сферу, узла ввода под мизинец левой руки в первом направлении, которое регистрируется датчиком перемещения. Затем этот датчик формирует сигнал, соответствующий вводимой букве А, и передает его на аналого-цифровой преобразователь (АЦП), который преобразует этот сигнал в цифровой код. Полученный цифровой код далее поступает в компьютер и выводится на дисплей.
Для ввода латинской буквы Q оператор вращает тело вращения узла ввода под мизинец левой руки во втором направлении. Это направление также регистрируется соответствующим датчиком перемещения, который затем формирует сигнал, соответствующий вводимой букве Ф, и передает этот сигнал на АЦП, преобразующий этот сигнал в соответствующий цифровой код и передающий этот код в компьютер. Ввод латинской буквы Z осуществляется аналогичным образом, при этом тело вращения узла ввода под левый мизинец вращается в третьем направлении.
Для ввода русских букв и символов оператору, если он работает в режима ввода латинских букв, необходимо нажать на клавишу переключения в режим ввода русских и латинских букв и символов.
Дале ввод букв и символов осуществляется аналогичным образом. Так, например, для ввода русской буквы Ф оператор вращает тело вращения узла ввода под мизинец левой руки в первом направлении. Это направление также регистрируется датчиком перемещения, который вырабатывает сигнал, поступающий на АЦП, преобразующий полученный сигнал в соответствующий цифровой код, поступающий затем в компьютер. Ввод русских букв Й и Я осуществляется аналогичным образом, при этом упомянутые тела вращения узла ввода под мизинец левой руки перемещаются соответственно во втором направлении и третьем направлении.
Ввод других латинских и русских букв производится аналогичным образом, путем вращения соответствующих тел вращения узлов ввода соответствующих пальцев руки в соответствующие направления.
Для ввода прописных букв оператор нажимает другую клавишу переключения в режим ввода строчных и прописных букв и вращает соответствующие тела вращения в определенные направления. Для ввода пробелов между словами оператор нажимает клавишу пробела
Представленные на фиг. 4-7 варианты конструкций заявленного устройства призваны показать достаточно широкую область его применения в зависимости от конкретных нужд и вкусов потенциальных пользователей.
В частном случае выполнения корпуса устройства ввода в виде двух автономных частей под правую и левую руки на каждой части клавиатуры располагаются четыре манипулятора, две клавиши переключения в режим ввода латинских и русских букв и символов и в режим ввода строчных и прописных букв и клавиши пробела.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАМКА ЭРГОНОМИЧЕСКАЯ СЪЕМНАЯ ДЛЯ КЛАВИАТУРЫ ПЭВМ | 2013 |
|
RU2547630C2 |
| УСТРОЙСТВО СВЕРХСКОРОСТНОГО ВВОДА БУКВ ДЛЯ СОТОВОГО ТЕЛЕФОНА | 2002 |
|
RU2298822C2 |
| Тактильный дисплей и реализуемый им способ | 2016 |
|
RU2841338C2 |
| Тактильный дисплей и реализуемый им способ | 2016 |
|
RU2644532C9 |
| СПОСОБ ВВОДА БУКВЕННО-ЦИФРОВОЙ И СИМВОЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2182351C1 |
| ПОРТАТИВНАЯ ПИШУЩАЯ МАШИНА | 1991 |
|
RU2008228C1 |
| КЛАВИАТУРА ДЛЯ ПЕРСОНАЛЬНЫХ И ДРУГИХ ЭЛЕКТРОННЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН И СРЕДСТВ | 1994 |
|
RU2088964C1 |
| ПИШУЩАЯ МАШИНКА | 1995 |
|
RU2107628C1 |
| КЛАВИАТУРА ДЛЯ КОМПЬЮТЕРА (GLEAM - КЛАВИАТУРА А. ПРОХОРОВА) | 2006 |
|
RU2309449C1 |
| УЧЕБНАЯ КЛАВИАТУРА | 2016 |
|
RU2630164C1 |
Изобретение относится к вычислительной технике, в частности к конструкции устройств ввода. Техническим результатом является повышение производительности труда и снижение количества ошибок оператора, уменьшение габаритов устройства ввода при сохранении функциональных возможностей и сохранении оператором общепринятой техники слепой десятипальцевой печати при вводе информации. Для этого в устройстве ввода число узлов ввода соответствует числу пальцев правой и левой рук, за исключением больших пальцев рук, при этом каждый палец предназначен для обслуживания одного узла ввода букв и символов, каждый из упомянутых узлов ввода выполнен в виде тела вращения и датчика перемещения, предназначенного для регистрации направления перемещения тела вращения. 5 з.п.ф-лы, 7 ил.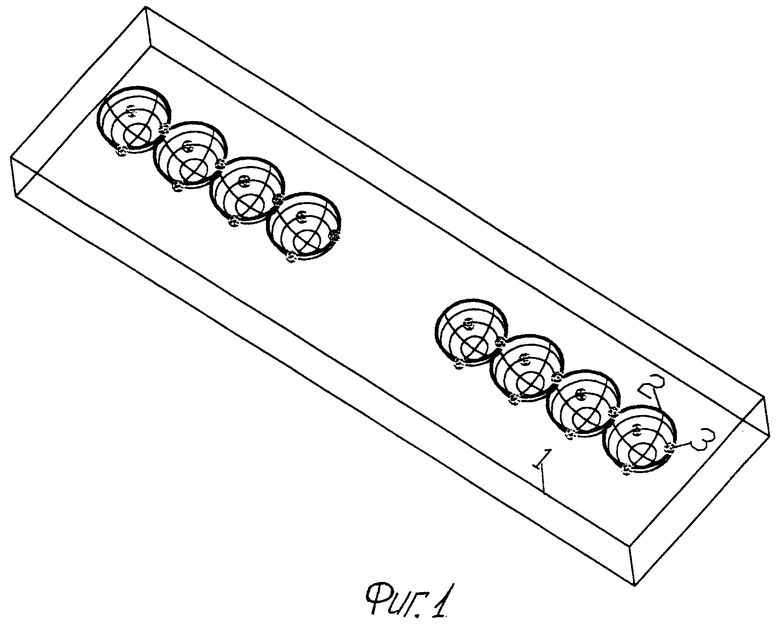
| US 4849732 А, 18.07.1989 | |||
| КЛАВИАТУРА ДЛЯ ПЕРСОНАЛЬНЫХ И ДРУГИХ ЭЛЕКТРОННЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН И СРЕДСТВ | 1994 |
|
RU2088964C1 |
| US 5644338 A, 01.07.1997 | |||
| КЛАВИАТУРА ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА | 1996 |
|
RU2121707C1 |
| US 5847697 A, 08.12.1998 | |||
| US 5535421 А, 09.07.1996. | |||

