Изобретение относится к шаговым устройствам для перемещения подвижных объектов.
Назначение несущих шаговых устройств описано в частности в предыдущем патенте Финляндии 87171 того же заявителя. Назначением шагового устройства данного вида является обеспечение несущей функции и функции поступательного движения. Подобные шаговые устройства, снабженные двухплечевым рычажным сочленением, обычно используют в конструкции так называемых "шагающих машин". Модель движения заимствована из устройства конечностей млекопитающих, поступательное движение которых при ходьбе основано на взаимоперемещениях бедра (верхнего рычага), соединенного с телом (рамой) через бедренный сустав (несущее шарнирное соединение) и голень (нижний рычаг), соединенную с бедром коленным суставом (коленчатым шарнирным соединением). Эти взаимоперемещения являются результатом вращательных движений в указанных шарнирных соединениях.
При заимствовании у природы траекторий движения в конструкциях машин наибольшее внимание уделяют приводам, движущим указанные подвижные части, и управлению ими. С целью получения правильных перемещений шагового устройства, имея в виду траектории движения его составных частей в зависимости от изменения нагрузки, требуются особо сложные системы контроля и управления высокой функциональной надежности, чтобы обеспечить поступательное движение нагруженных платформ без каких бы то ни было колебаний.
Техническим результатом изобретения является устранение вышеуказанных недостатков и предложение технического решения, касающегося устройства, в частности позволяющего повысить функциональную надежность ножной опоры и улучшить ее эффективность.
Указанный технический результат достигается использованием шагового устройства, включающего верхний рычаг, соединенный с корпусом или ему подобным объектом перемещения посредством несущего шарнирного соединения с возможностью перемещения корпуса за счет шагового устройства, и нижний рычаг, шарнирно присоединенный к противоположному концу верхнего рычага посредством коленчатого шарнирного соединения, при этом нижний конец нижнего рычага включает опорный элемент, контактирующий с поверхностью, относительно которой осуществляют движение, а каждое из указанных шарнирных соединений имеет привод, осуществляющий их вращательное движение, соответственно расположенный между корпусом и верхним рычагом для несущего шарнирного соединения и между верхним и нижним рычагами для коленчатого шарнирного соединения, при этом одно из шарнирных соединений содержит дополнительно к активному приводу также пассивные средства передачи усилий, обеспечивающие возможность передачи изменения угла поворота соединения под действием сил, результирующих воздействия активного привода и внешней нагрузки с учетом действия компенсационных приводов с целью принятия формы изменения положения нижнего конца нижнего рычага, компенсируя этим указанное угловое изменение.
Кроме этого, пассивные средства передачи усилий расположены в коленчатом шарнирном соединении и предназначены для передачи вращательного движения, вызываемого активным приводом, расположенным в этом соединении таким образом, чтобы принять форму изменения положения нижнего конца нижнего рычага, компенсируя изменение угла, вызываемое вращательным движением.
Компенсационный привод расположен в несущем соединении и предназначен для компенсации изменения в угле поворота верхнего рычага. Компенсационный привод расположен в нижнем конце нижнего рычага и предназначен для компенсации в изменении длины нижнего рычага. Пассивные средства передачи усилий и компенсационные приводы выполнены с возможностью изменения их длины.
В дополнение к компенсационному приводу, реагирующему на перемещение пассивных средств передачи усилий, активный привод, действующий в несущем шарнирном соединении, выполнен с возможностью изменения длины, и оба привода соединяют последовательно один за другим таким образом, чтобы суммарное изменение их длин отражало соответствующее угловое изменение в соединении.
Активные приводы, пассивные средства передачи усилий, в равной степени, как и компенсационные приводы выполнены в виде гидравлических цилиндров.
Верхний рычаг имеет конструкцию параллелограмма.
Окончание коленчатого шарнирного соединения со стороны верхнего рычага оснащено связью, образованной частью конструкции параллелограмма и служащей для присоединения одного из концов активного привода, расположенного в коленчатом шарнирном соединении, при том, что другим концом активный привод соединен с нижним рычагом. Пассивные средства передачи усилий соединены одним из своих концов с указанной связью конструкции параллелограмма, а другим концом соединены с нижним шарниром.
Нижний рычаг также имеет конструкцию параллелограмма.
Компенсационный привод, расположенный в нижней части нижнего рычага, монтируют на короткой стороне конструкции параллелограмма.
Основной идеей является обеспечение возможности передачи углового перемещения в одном из шарнирных соединений в основном пассивными средствами передачи усилий на другой привод или соединение, компенсируя указанное угловое перемещение с его преобразованием в искомую поступательную траекторию движения. При этом указанное преобразование не требует использования дополнительных активных приводов совместно с базовым приводом шарнирного соединения, а преобразование углового перемещения осуществляется автоматически.
В соответствии с преимущественным альтернативным исполнением изобретения, изложенным в п.3 формулы, пассивные средства передачи усилий преобразуют активное движение коленчатого шарнирного соединения в движение несущего шарнирного соединения. Например, при увеличении абсолютной величины угла поворота коленчатого соединения, т.е. когда нижний рычаг (голень) сдвигается в сторону от некоторого среднего положения, соответствующий угол несущего соединения, сопряженного с несущей платформой, уменьшится. При этом точка опоры нижнего конца нижнего рычага приобретет траекторию движения, в этом случае близкую к линейной в зависимости от конкретного конструкторского замысла.
Другой альтернативой является исполнение нижнего конца нижнего рычага с возможностью изменения длины таким образом, что при увеличении абсолютной величины угла поворота коленчатого соединения точка опоры нижнего конца рычага будет смещена по его длине под действием привода, введенного между рычагом и точкой опоры.
Другие преимущественные исполнения изобретения изложены в прочих зависимых пунктах формулы и отражены в нижеприводимом описании.
Сущность изобретения будет изложена далее со ссылками на прилагаемые чертежи, на которых
фиг.1 - вид сбоку заявляемого шагового устройства вместе с приводами,
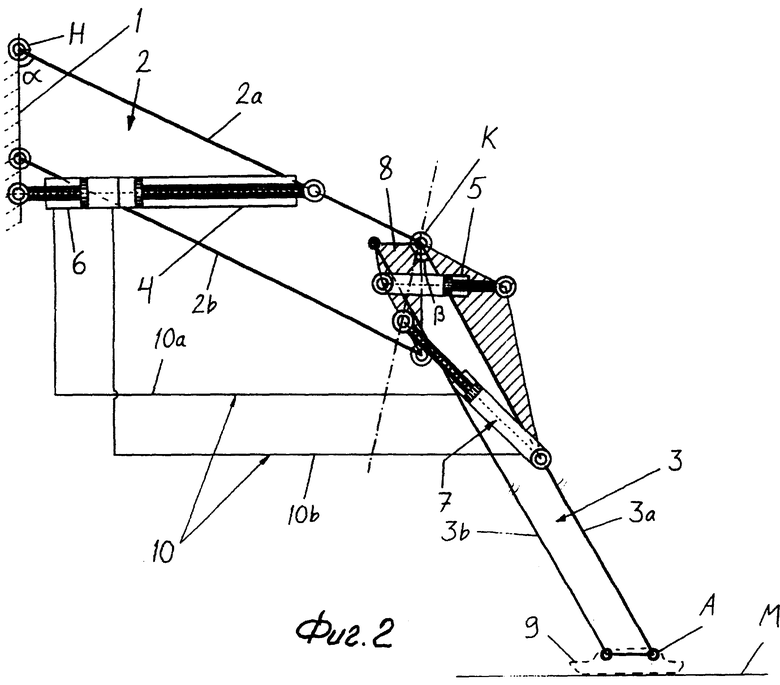
фиг. 2 - схематическая модификация исполнения изобретения, представленного на Фиг.1,
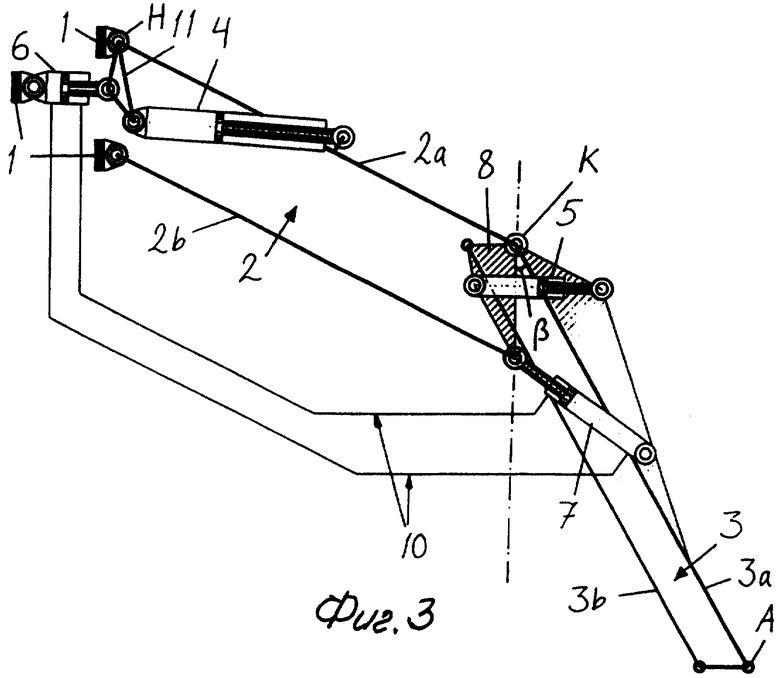
фиг. 3 - одна из возможных модификаций конструкции несущего шарнирного соединения,
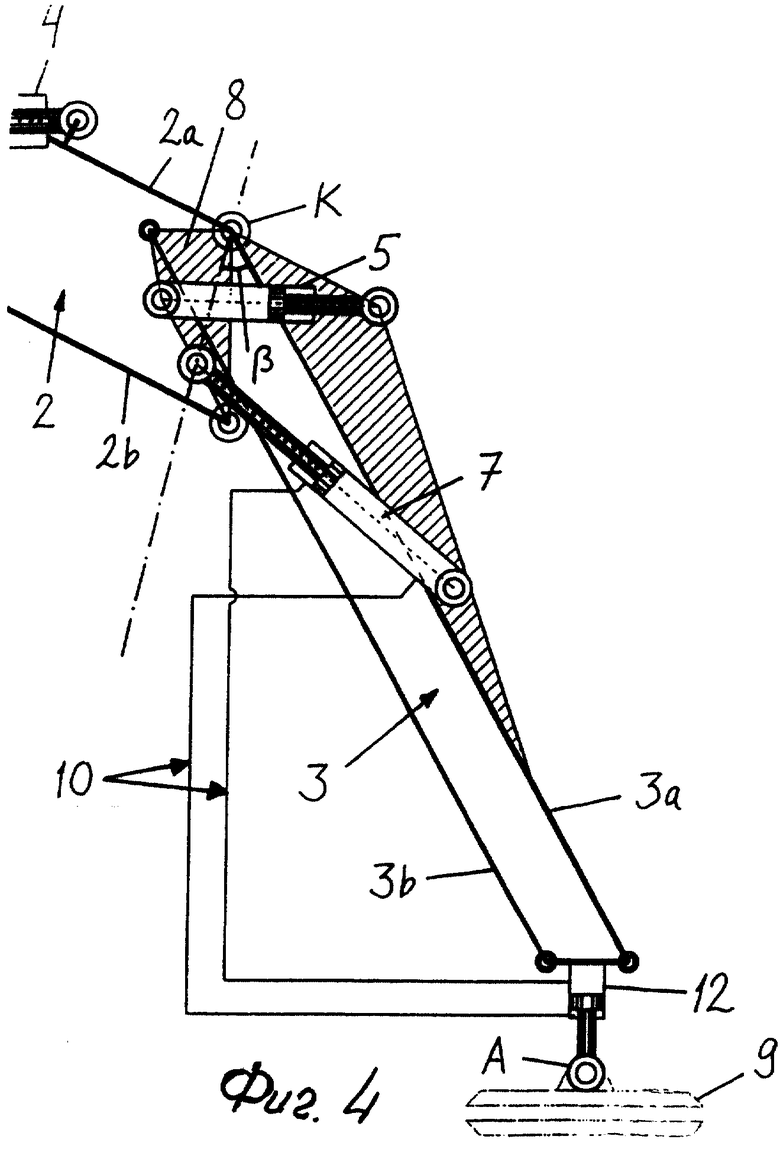
фиг. 4 - иллюстрация возможной альтернативы конструкционной компенсации перемещений,
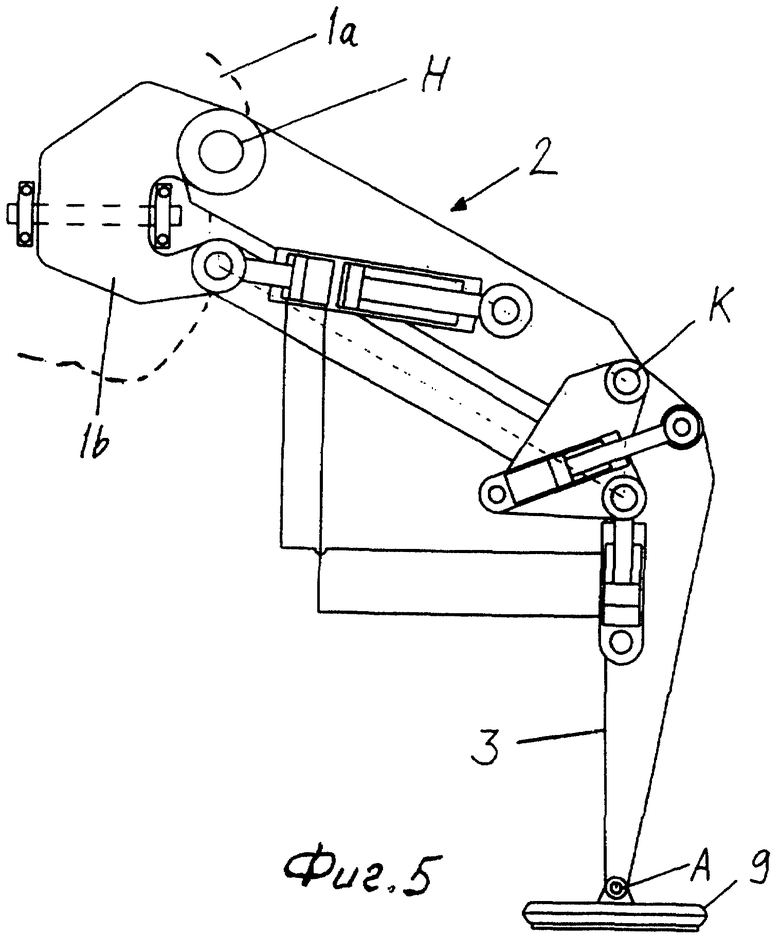
фиг. 5 показывает конструкционные альтернативы в соединении шагового устройства и несущей платформы,
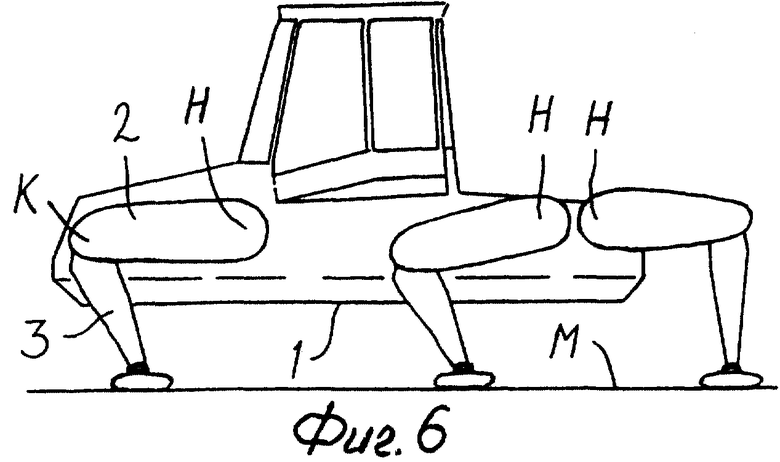
фиг. 6 показывает возможный вид машины, в которой вероятно использование заявляемого изобретения.
Вид сбоку первого варианта исполнения заявляемого шагового устройства показан на фиг. 1. Шаговое устройство присоединено к несущей платформе 1, которая предназначена для транспортирования такого рода. Соединение осуществлено через несущее шарнирное соединение Н, к которому шарнирно крепится верхний рычаг 2 устройства с возможностью вращательных движений в вертикальной плоскости. Нижний рычаг 3 шарнирно крепится к другому концу верхнего рычага 2 через коленчатое шарнирное соединение К, также с возможностью вращательных движений в вертикальной плоскости. Нижний рычаг 3 переходит снизу в опорную точку А, принимающую нагрузку, результирующую контакты с опорной поверхностью движения М и шарнирно соединенную с опорным элементом 9. Изменение угла α, образованного продольной осью верхнего рычага 2 с вертикальной плоскостью и сопряженного с плоскостью движения М, осуществляют активным приводом изменения длины 4, один конец которого присоединен к несущей платформе 1, а другой к верхнему рычагу 2. Соответственно в коленчатом шарнирном соединении К расположен другой активный привод изменения длины 5, один конец которого смонтирован на верхнем рычаге 2, а другой на нижнем рычаге 3. Изменение длины этого последнего привода вызывает изменение угла β, сопряженного с поверхностью движения М и образованного некоторой нулевой линией, например вертикальной линией, параллельной любой из вертикалей, образующих несущую платформу 1, и продольной осью нижнего рычага. В положении, изображенном на фиг.1, угол β имеет нулевое значение, поскольку продольная ось нижнего рычага 3 совпадает с линией, выбранной в качестве нулевой.
Вышеописанные функции, определяемые действием активных приводов, известны и могут быть реализованы с использованием приводов 4, 5, имеющих рабочую среду высокого давления, таких как гидравлические цилиндры, соединенные с источником подачи среды высокого давления, и управляемых клапанами по известным для этих целей схемам.
Пассивные средства передачи усилий 7 размещают в шарнирном соединении К. Они представляют средства, принимающие воздействие усилий внешних нагрузок, действующих на опорный элемент, в равной степени как и от действия активного привода 5, расположенного в этом же соединении К для изменения угла β. Средства предназначены также для передачи перемещений на компенсационный привод 6, располагаемый в несущем шарнирном соединении Н. Это вызывает изменение в величине угла α в соединении Н, компенсируя изменение величины угла β коленчатого соединения К.
На фиг. 1 показана ситуация, при которой нога оторвана от поверхности движения М. Если, например, угол β начнет увеличиваться, что означает поступательное движение ноги вперед относительно ее некоторого среднего положения, при котором значение угла β имеет нулевое значение, угол α будет уменьшаться, что означает шарнирное опускание верхнего рычага 2, как показано стрелками на фиг.1. При правильной передаче вышеупомянутых усилий заявляемыми пассивными средствами точка опоры А, завершающая снизу нижний рычаг 3, будет совершать движение по траектории, близкой к горизонтальной, проиллюстрированной на фиг. 1 прерывистой линией. В этом случае для совершения указанного движения действие активного привода в несущем соединении не требуется, но может быть использовано в качестве компенсационного привода для суммарного выравнивания изменяющейся высоты шагового устройства. Таким образом, перед тем как сделать следующий шаг, активный привод может быть задействован для подъема ноги вверх от плоскости движения М. И далее, если возникает необходимость поднять ногу шагового устройства еще выше, например для преодоления возникшего препятствия, опять приводят в действие активный привод 4 несущего соединения, поднимающего вверх верхний рычаг и с ним вместе присоединенный к нему нижний рычаг 3. При этом описанное выше сложное связанное движение нижнего рычага 3 и верхнего рычага 2 может быть осуществлено и независимо с помощью одного только активного привода 5 коленчатого соединения К для каждого соответствующего мгновенного положения по высоте верхнего рычага 2, т.е. без влияния на величину угла α.
Последовательность действий при контакте ноги с поверхностью движения М следующая. В начале опорной фазы шага шаговое устройство может быть позиционировано относительно поверхности движения посредством активного привода 4 несущего соединения Н так, что верхний рычаг 2 опускается в основном преимущественно из исходного вертикального положения при одновременном шарнирном движении вперед нижнего рычага 3, который удаляется от верхнего рычага 2 на величину угла β. В этом случае нагрузка несущей платформы 1 распределяется между рассматриваемой ножной опорой и другими опорами шагового устройства. Коленчатое шарнирное соединение К сгибается под действием активного привода 5, вызывающего уменьшение угла β, который в зависимости от длины шага может приобретать значение от нуля, соответствующее некоторому среднему положению нижнего рычага 3, до отрицательного, в результате чего абсолютное значение угла β снова увеличивается. Следуя в аналогичном порядке, угол α увеличивается, достигает своего максимального значения и снова уменьшается. В идеальном случае высота положения несущей платформы 1, оснащенной шаговыми устройствами, остается неизменной в результате компенсации, другими словами, заявляемое шаговое устройство функционально эквивалентно колесному приводу.
Активные приводы верхнего рычага 2, а именно активный привод 4 и привод 6, компенсирующий воздействие пассивных средств передачи усилий 7, имеют конструкцию изменяющейся длины и располагаются последовательно один за другим таким образом, что точка крепления активного привода 4 к несущей платформе 1 одновременно является окончанием компенсационного привода 6, следующим за цилиндром и направленным в сторону верхнего рычага 2, при том, что его второй конец непосредственно закреплен на несущей платформе 1. Изменение длины компенсационного привода 6 не приводит автоматически к изменению длины активного привода 4 и, таким образом, суммарное изменение длин приводов, действующих на верхний рычаг 2, полностью компенсируется приводом 6. Соответствующая ситуация возникает, когда общее изменение длины имеет место за счет воздействия только одного привода, например активного привода 4, воздействующего на верхний рычаг 2, т.к. указанные приводы соединены вместе чисто механически и каждый из них имеет независимое управление. При одновременном действии активных приводов 4 и 5 результирующее изменение длин компенсируется совместным действием приводов 4 и 6.
На практике передача усилий, формирующих траекторию движения, от коленчатого соединения К к несущему соединению Н осуществляется посредством среды высокого давления, например гидравлического масла, с использованием так называемой пассивной цепи 10. Привод, выполняющий роль пассивных средств передачи усилий 7, одним своим концом закреплен на верхнем рычаге 2, а другим на нижнем рычаге 3. По мере увеличения угла β в коленчатом соединении К, принимая за нулевой отсчет некоторое среднее положение нижнего рычага 3, показанное на фиг.1, при котором продольная ось указанного рычага имеет вертикальное положение относительно несущей платформы 1, среда высокого давления поступает из камеры, охватывающей поршневой шток средств 7, в камеру компенсационного привода, охватывающую поршневой шток последнего, используя технологическую линию 10а цепи 10, таким образом, что компенсационный привод 6 реагирует на растяжение средств 7. Противоположные концы соответствующих поршней при этом также взаимно соединены линией обратной связи 10b, заполненной средой высокого давления. Размеры поршней и цилиндров выбирают из условия эквивалентности изменяющихся соответствующих друг другу объемов, а также из условия пропорциональности угловой компенсации угла α при изменениях угла β. При этом комбинации приводов 4 и 5 образуют так называемый тандем цилиндров.
В дополнение к соблюдению заданных преимущественных траекторий движения изобретение обеспечивает функцию торможения. Например, при опоре машины на поверхность движения М шаговым устройством отклонение нижнего рычага 3 от некоторого среднего положения, показанного на фиг.1, немедленно вызовет опускание верхнего рычага 2 по отношению к несущей платформе 1. Аналогичное явление имеет место при ориентации нижнего рычага навстречу движению и против него при увеличении абсолютной величины угла β. Это явление сказывается на перераспределении сил таким образом, что активный привод 5 в коленчатом соединении К может быть выполнен меньшего размера, чем обычно.
Фиг. 1 также показывает способ преимущественного крепления верхнего 2 и нижнего 3 рычагов друг к другу и к несущей платформе. Верхний рычаг 2 образован механизмом параллелограмма, включающего основной рычаг 2а, воспринимающего основную нагрузку и выполненного в виде большого плеча параллелограмма, а также включающего точку крепления активного привода 4. Кроме этого, механизм включает вспомогательный рычаг 2b, образованный вторым длинным плечом параллелограмма. Основной и вспомогательный рычаги шарнирно соединены с несущей платформой 1, при том, что другие их стороны замкнуты связью 8, также имеющей шарнирные соединения и одновременно образующей короткое плечо параллелограмма. Ось шарнирного соединения связи 8 с основным рычагом 2а совпадает одновременно с осью вращения основного рычага 2а относительно нижнего рычага 3 в коленчатом соединении К.
Связь 8 выполнена в виде плоского элемента, образующая плоскость которого имеет основное положение, совпадающее с плоскостью шарнирного вращения механизма. Активный привод 5 коленчатого соединения К присоединен одним своим концом к этому плоскому элементу, а другим концом к нижнему рычагу 3.
Пассивные средства передачи движущих усилий 7 в свою очередь шарнирно соединены одним своим концом со связью 8, а другим концом с нижним рычагом 3. Кроме этого, ось вращения в точке соединения средств 7 и связи 8 может совпадать с осью шарнирного вращения связи 8 относительно вспомогательного рычага 2b, как показано на фиг.1.
Средства 7 изменяемой длины, кроме этого, располагают в мертвой зоне или, другими словами, на линии кратчайшего расстояния между осью шарнирного соединения К и точкой опоры А на нижнем конце нижнего рычага 3 в момент его нахождения в среднем положении, показанном на фиг.1. В одном из возможных конструкторских решений, представленных на фиг.1, подобный подход реализован так, что точка шарнирного соединения средств 7 и нижнего рычага 3 расположена на упомянутой линии, а точка шарнирного соединения верхнего рычага 2 расположена в нижней точке сочленения связи 8 с коротким плечом параллелограмма. Это короткое плечо совпадает с линией или продольной осью нижнего рычага 3 в его среднем положении, когда угол β имеет нулевое значение. При сжатом до максимума состоянии средств 7 компенсационный привод 6 наоборот имеет наиболее вытянутое положение. Совершенно очевидно, что ориентация продольной оси нижнего рычага в его среднем положении может быть другой по отношению к короткому плечу параллелограммных связей, а точка соединения пассивных средств 7 с верхним рычагом 2 может находится в любом ином месте, чем в точке сочленения параллелограммных связей. Кроме этого, представляется возможным совпадение продольной оси средств 7 с продольной осью нижнего рычага 3 в определенном среднем положении нижнего рычага 3.
На фиг.2 схематически показано решение, отличное в некоторой степени от представленного на фиг.1. Разница в соединении компенсационного привода 6 и активного привода 4 с несущей платформой 1 на фиг.2 по сравнению с решением, представленным на фиг. 1, заключается в том, что последнее решение предусматривает совпадение точек шарнирного соединения вспомогательного рычага 2b и несущей платформы с точкой присоединения к платформе приводов, а решение фиг. 2 предусматривает раздельное размещение указанных точек. Однако такое размещение не изменяет основных функций заявляемого устройства. Кроме этого, нижний рычаг 3 также имеет в этом варианте конструкцию параллелограмма, включая основной рычаг 3а, соединяющий коленчатое соединение К и точку опоры А и несущий основную нагрузку, и параллельный ему вспомогательный рычаг 3b, верхний конец которого шарнирно соединен со связью 8 при том, что его нижний конец шарнирно соединен с опорным элементом 9 в точке опоры А. Отличиями данного решения являются форма опорного элемента в виде плоской пяты или элемента любой другой формы, отвечающей особенностям поверхности движения М, и его ориентация в соответствии с направлением движения несущей платформы. Кроме этого, пассивные средства передачи усилий 7 одним своим концом, направленным к верхнему рычагу 2, имеют шарнирное соединение в произвольной точке на поверхности связи 8, а другим концом соединены с рычагом 3а. Во всех других отношениях действие механизма устройства в данном варианте аналогично рассмотренному ранее.
Фиг. 3 показывает альтернативный вариант конструкции несущего соединения Н. Верхний 2 и нижний 3 рычаги состоят из конструкций в виде параллелограммов, аналогично показанным на фиг. 2. Верхний рычаг 2 имеет шарнирное соединение с несущей платформой 1 в точках сочленения короткого плеча конструкции параллелограмма. Активный привод 4 и компенсационный привод 6 механически соединены вместе так, что компенсационный привод 6 имеет шарнирное соединение с несущей платформой 1 при том, что его другой конец шарнирно соединен с коротким рычагом 11, который в свою очередь шарнирно соединен с несущей платформой 1 в точке, совпадающей в данном случае с одним из сочленений конструкции параллелограмма. К противоположному концу короткого рычага крепится активный привод 4. Представленное решение отличается от тандема цилиндров, показанного на фиг.1 и 2, хотя его основные функции остаются прежними: активный привод 4 и компенсационный привод 6 совместно воздействуют на шарнирное движение верхнего рычага 2, сохраняя возможность независимого действия при том, что именно их совместное изменение длины влияет на положение верхнего рычага 2 и изменение угла α. Кроме этого, пассивные средства передачи усилий в конструкции коленчатого соединения, представленной на фиг. 3, имеют точку соединения с рычагом 3, лежащую в стороне от его продольной оси. Это также не влияет на основные функции заявляемого устройства.
Фиг. 4 показывает конструкцию, в которой функция компенсации может быть обеспечена иначе, чем путем воздействия на несущее соединение Н через пассивные средства передачи усилий 7. В этом случае все, что необходимо - это активный привод 4, один из концов которого соединен с верхним рычагом 2, как показано на чертеже. Функция компенсации при этом достигается путем оснащения нижнего конца нижнего рычага 3 компенсационным приводом изменения длины 12. По мере увеличения угла β, изменение длины пассивных средств передачи усилий 7 отражается в эквивалентном изменении длины компенсационного привода 12, что влечет суммарную компенсацию движения нижнего рычага 3 в виде его удлинения за счет удлинения привода 12, соответственно сдвигая вниз точку опоры А и состыкованный с ней опорный элемент 9. По мере уменьшения угла β изменение длин происходит в обратном порядке. Данная конструкция также позволяет определить некоторое среднее положение, или нулевую линию, при которой угол β принимается равным нулю, а компенсационный привод 12 имеет наиболее короткую форму при том, что любое отклонение в положении нижнего рычага 3 в любом направлении вызовет смещение точки опоры А на нижнем конце рычага на некоторое пропорциональное расстояние.
Кроме этого, исполнение заявляемого устройства, показанное на фиг.4 позволяет передачу усилий между коленчатым соединением К и нижним концом нижнего рычага 3 посредством среды высокого давления, например гидравлического масла, используя пассивную цепь 10. Принцип действия аналогичен описанному выше применительно к ссылкам на чертежи фиг.1-3.
Нижний конец нижнего рычага 3 образован конструкционно жестким креплением указанного компенсационного привода 12 на коротком плече параллелограмма, образующего рычаг 3, при том, что нижний конец привода, представляющий в настоящем варианте торцевое окончание штока клапана гидравлического цилиндра, шарнирно соединен с опорным элементом 9 в виде плоской пяты в точке опоры А, в качестве которой может быть принят нижний конец рычага 3 и которая обеспечивает сообщение сил между поверхностью движения М и несущей платформой 1.
Заявляемое изобретение не ограничивается вышеописанным, имея в виду ограничения движения шагового устройства. Шаговое устройство имеет такую преимущественную конструкцию, при которой возможно задать среднее положение нижнего рычага 3, которое в свою очередь является экстремальным положением компенсационных движений, при которых угол α в несущем соединении Н в результате компенсаций приобретает максимальное значение, или соответственно изменение длины нижнего конца нижнего рычага 3 приобретает минимальное значение при угле β, равном нулю. Это среднее положение, при котором продольная ось рычага 3 совпадает с выбранной нулевой линией, может быть выбрано из соображений статической устойчивости, например это может быть любая линия, исходящая из несущей платформы 1. Это возможно за счет выполнения верхнего рычага 2 в виде параллелограмма, т.к. нижний рычаг 3, имеющий некоторый угол с верхним рычагом 2, при любых обстоятельствах в данном случае имеет строго заданный угол по отношению к несущей платформе 1.
На фиг. 5 показан способ крепления несущего соединения Н к несущей платформе 1 путем его шарнирного соединения с вспомогательным элементом 1b, который также в свою очередь шарнирно крепится к основной части несущей платформы 1а. В результате этого заявляемое шаговое устройство с присущими ему траекториями движения приобретает еще одну степень свободы в виде вращения вспомогательного элемента 1b относительно основной части несущей платформы 1а.
В качестве примера на фиг.6 показана машина, в которой может быть использовано заявляемое устройство. Предполагается, что подобная машина будет иметь возможность двигаться в условиях бездорожья и леса. Машина снабжена шестью ногами, по три с каждой стороны. Плоскость вращательных движений сочленений шагового устройства ориентирована в данном случае в направлении движения одновременно с возможностью вращения по крайней мере еще в одной плоскости, например, как вспомогательный элемент 1b, показанный на фиг.5. При этом заявляемое устройство может быть с равным успехом применено в машинах другого типа, которые могут иметь разное количество ног и обладать различными способами их сочленения с несущей платформой.
Само по себе заявляемое шаговое устройство не ограничивается лишь примерами его исполнения, описанными выше, но может иметь и другие модификации в рамках изобретательского замысла, охватываемого формулой в целом. Например, необязательно, чтобы пара приводов 4, 6 имела последовательное механическое соединение один за другим, как показано на фиг.1-3. Однако если они имеют независимые точки их сочленений, должна быть обеспечена возможность свободы движения активного привода 4, например в случае использования гидравлического цилиндра должна быть обеспечена свобода перетекания среды высокого давления между камерами с обеих сторон поршня, т.к. он будет перемещаться также и во время работы компенсационного привода 6.
Конструкция заявляемого устройства может предполагать также размещение приводов внутри рычагов 2 и 3. Например фиг.1 можно понимать как вид сбоку, предполагая наружное размещение приводов относительно рычагов, а можно считать его как вертикальное сечение рычагов, имеющих полую конструкцию, заключающую в себе приводы.
Заявляемое изобретение может при соответствующих изменениях быть использовано в приложении к шаговому устройству, содержащему пары активных приводов, описанных в более раннем патенте заявителя 87171.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУПРИЦЕП | 1991 |
|
RU2012510C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ ПОДВИЖНОГО ЭЛЕМЕНТА | 1994 |
|
RU2132894C1 |
| Механизм для направления и центрирования буровых штанг | 1982 |
|
SU1329626A3 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ | 2005 |
|
RU2297340C1 |
| ПРИВОДНОЕ СРЕДСТВО И ЦЕПНОЙ ПРИВОД | 2008 |
|
RU2438054C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2096310C1 |
| ВЫКЛЮЧАТЕЛЬ | 2012 |
|
RU2590908C2 |
| ПОДМОСТИ | 2014 |
|
RU2668608C2 |
| СМЕННАЯ ПЛАТФОРМА И СРЕДСТВО ТРАНСПОРТИРОВКИ СМЕННОЙ ПЛАТФОРМЫ | 2013 |
|
RU2617768C2 |
| ЭКЗОСКЕЛЕТОН | 1995 |
|
RU2110244C1 |
Изобретение относится к устройствам для перемещения подвижных объектов. Шаговое устройство включает верхний рычаг, соединенный с корпусом или ему подобным объектом перемещения посредством несущего шарнирного соединения с возможностью перемещения корпуса за счет шагового устройства. Также включает нижний рычаг, шарнирно присоединенный к противоположному концу верхнего рычага посредством коленчатого шарнирного соединения. При этом нижний конец нижнего рычага включает опорный элемент, контактирующий с поверхностью, относительно которой осуществляют движение. Каждое из указанных шарнирных соединений имеет привод, осуществляющий их вращательное движение, соответственно расположенный между корпусом и верхним рычагом для несущего шарнирного соединения и между верхним и нижним рычагами для коленчатого шарнирного соединения. Одно из шарнирных соединений содержит дополнительно к активному приводу также пассивные средства передачи усилий, обеспечивающие возможность передачи изменения угла поворота соединения под действием сил, результирующих воздействия активного привода и внешней нагрузки с учетом действия компенсационных приводов с целью принятия формы изменения положения нижнего конца нижнего рычага, компенсируя этим указанное угловое изменение. В результате повышается надежность ножной опоры и повышается ее эффективность. 11 з.п.ф-лы, 6 ил.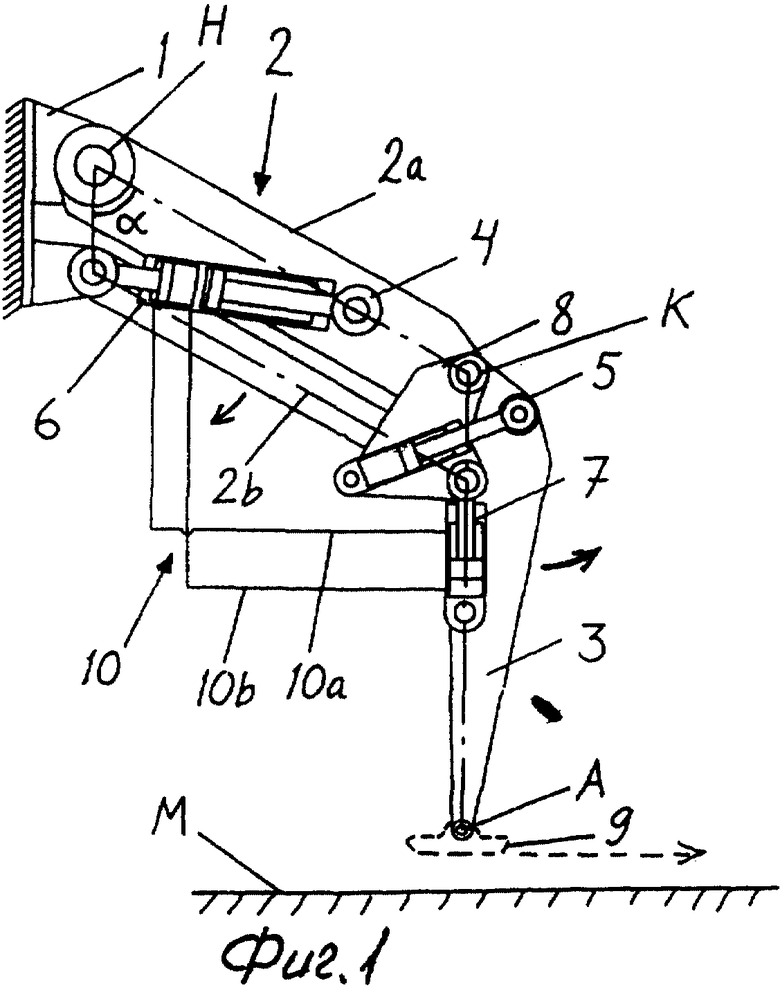
| US 4202423 А, 13.05.1980 | |||
| WO 9203328 F1, 05.03.1992 | |||
| DE 4028773 A1, 18.04.1991 | |||
| US 4779691 A, 25.10.1988 | |||
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |

