Настоящее изобретение относится к подъемным устройствам для управления перемещениями подвижных элементов, в частности, к подъемным устройствам, предназначенным для транспортирования к месту проведения работ на транспортной платформе, являющейся составной частью транспортного средства и предназначенного для погрузочно-разгрузочных операций с подвижным элементом в месте проведения работ по крайней мере частично над поверхностью подъездного пути в вертикальном и горизонтальном измерениях с использованием подъемных элементов и элементов перемещения, являющихся составными частями рамы подъемного устройства и приводимых в действие вспомогательной силой, преимущественно гидравлического вида, кроме этого рама оснащена средствами энергетики и привода, такими как гидравлический привод и пульт управления или им подобными. Рама оснащена по крайней мере одной, преимущественно двумя парами опорных звеньев, последовательно располагаемыми в продольном измерении рамы и обладающими возможностью выдвигаться за поперечные пределы рамы, а также имеет упомянутые элементы перемещения, такие как колеса, гусеницы или подобные им устройства для маневрирования рамы по поверхности земли, при этом с целью обеспечения возможности поперечного выдвижения опорных звеньев, рама оснащена практически поперечными телескопическими штангами, также последовательно размещенными в продольном измерении рамы. В транспортном положении элементы перемещения как часть подъемного устройства поднятого на транспортную платформу, в основном, убраны на поверхность платформы и выдвигаются за пределы платформы с началом работ.
Подъемное устройство, в некоторой части аналогичное вышеописанному, известно из публикации заявки DE-2309930. Данная публикация раскрывает подъемное устройство, оснащенное одной парой параллельных гусениц, подвижных в вертикальном измерении по отношению к подъемному устройству. Подъемные элементы данного подъемного устройства, кроме этого, оснащены отдельными подъемными цилиндрами для более устойчивой опоры подъемного устройства на поверхности земли при осуществлении операций подъема или поперечного перемещения. Кроме этого, подъемное устройство оснащено ребордными колесами для перемещения подъемного устройства по подъездному пути, например, для его транспортировки к месту проведения работ, при этом упомянутые ребордные колеса выполняют функцию опоры при погрузочно-разгрузочных манипуляциях подъемного устройства.
Подъемное устройство, описанное в публикации заявки DE-3419240, также некоторым образом отличается от заявляемого, в частности тем, что последнее предназначено для транспортирования до места проведения работ на транспортной платформе, являющейся составной частью транспортного средства, движущегося по подъездным путям. В транспортном положении гусеницы подъемного устройства, поднятого на транспортную платформу, подняты на поверхность платформы и выдвигаются за пределы платформы при производстве работ.
Патент США 5127335 раскрывает подъемное устройство, особенно отличающееся от описанных выше тем, что его опорные звенья шарнирно закреплены своими концами на раме, занимающей центрально осевое положение в подъемном устройстве, при этом опорные звенья с гусеницами имеют возможность поворота в горизонтальной плоскости. Кроме этого, рама подъемного устройства в своей центральной части имеет осевой шарнир, позволяющий осуществлять поворот одного конца рамы относительно другого в продольном измерении на определенный угол.
Решение, описанное в публикации заявки DE-2309930 представляет пару гусениц, напрямую соединенных с рамой, несущей подвижные элементы. Таким образом, погрузочно-разгрузочные операции, проводимые с большей частью подвижных элементов требуют использования двух последовательно ориентированных подъемных устройств, что в свою очередь накладывает требование по синхронизации работы обоих устройств. Синхронизация отдельных подъемных устройств, например даже при работе с одним объектом на одинаковых скоростях может привести к многим известным в данной области проблемам. При этом, под большим вопросом оказывается стабильность выдерживания направления движения, особенно при использовании двух самостоятельных подъемных устройств, при перемещении подвижного элемента, подвергающегося манипуляциям, например, выбранное направление движения в продольном измерении требует постоянного наблюдения и корректировки. Управление подъемными устройствами подобного типа, выдерживая выбранное направление, обычно осложняется необходимостью движения параллельных гусениц с разной скоростью. Таким образом, управление первым подъемным устройством накладывает ограничения на управление вторым. На практике такое управление практически невозможно из-за особенностей технологии, окружающих условий и т.д., т.к. и подъемные устройства, и манипулируемый подвижный элемент подвергаются в данном случае неоправданному риску.
В подъемном устройстве, описанном в заявке DE-3419240, пары гусениц подвижно смонтированы на собственных шасси, дополнительно соединяемых с рамой, несущей подвижные элементы. Высота такой рамы может оказаться причиной ухудшения устойчивости устройства, а также проведения погрузочно-разгрузочных работ в целом.
В решении, изложенном в вышеприведенном патенте США 5127335 пары гусениц, смонтированных последовательно в продольном измерении рамы, присоединены непосредственно к общей раме. Однако, описанное в патенте решение не обеспечивает необходимых преимуществ на практике, т.к. опорные звенья в данном случае имеют шарнирное соединение их концов с рамой и в силу этого шарнирные опорные звенья подвержены воздействиям моментов действующих сил. Осевой шарнир, имеющийся в серединном сечении рамы такого подъемного устройства, обеспечивает некоторое преимущество, особенно при манипуляциях с подвижным элементом парой гусениц, находящихся позади него. На практике, управляемость такого конкретного технического решения весьма проблематична в силу шарнирной подвески опорных звеньев. Так, например, согласованное взаимодействие таких опорных звеньев, имеющих общую раму, требует особой точности управления активаторами каждого из них. Даже незначительное относительное изменение угла между установкой таких опорных звеньев требует постоянных корректирующих воздействий, выдерживая заданную траекторию движения, особенно в продольном направлении.
Техническим результатом заявляемого изобретения является обеспечение качественного улучшения вышезатронутых недостатков и, соответственно, существенное повышение уровня техники в данной области.
Для достижения настоящего технического результата подъемное устройство для управления перемещениями подвижного элемента, приспособленное для транспортирования к месту работы на транспортной платформе, являющейся составной частью транспортного средства, предназначенное для погрузки и выгрузки подвижного элемента в месте проведения работ над поверхностью подъездного пути в вертикальном и горизонтальном направлениях посредством подъемных элементов и элементов перемещения, и содержащее раму, оснащенную средствами энергетики и приводами, например, гидравлическими, пультом управления по меньшей мере одной а преимущественно двумя парами опорных звеньев, имеющих возможность перемещения относительно друг друга для изменения поперечного размера между опорами рамы при помощи по меньшей мере одной пары раздвигающихся поперек подъемного устройства телескопических штанг, последовательно расположенных в продольном направлении рамы, и снабженных элементами перемещения, например колесами или гусеницами для перемещения рамы по поверхности земли, причем элементы перемещения выполнены с возможностью размещения в транспортном положении на транспортной платформе, а при работе - раздвижения за пределы платформы, имеет по меньшей мере крепление одной пары опорных звеньев на подъемном устройстве выполненным на общей балке, подвижно закрепленной на раме подъемного устройства с возможностью шарнирного движения - наклона и/или поворота пары опорных звеньев относительно рамы.
Кроме этого, рама смонтирована в нижней части телескопических штанг.
Элементы перемещения выполнены подвижными в вертикальном направлении относительно опорных звеньев с помощью подъемных элементов для изменения клиренса рамы подъемного устройства с землей, и/или, выполнены поворотными в горизонтальной плоскости для изменения направления перемещения подъемного устройства при помощи направляющих элементов, а общая балка, соединяющая опорные звенья, имеет силовое соединение с рамой подъемного устройства по меньшей мере одним связующим элементом, обеспечивающим опору преимущественно в вертикальном направлении пары опорных звеньев для осуществления их наклона и поворота.
Упомянутый связующий элемент представляет собой по меньшей мере одну шаровую опору, расположенную на пересечении поперечной и продольной осей пары опорных звеньев.
Балка прикреплена преимущественно сваркой к нижней поверхности телескопических штанг, при этом пара опорных звеньев прикреплена к подъемному устройству связующим элементом, расположенным между балкой и задней рамой, являющейся частью рамы подъемного устройства.
Рама подъемного устройства выполнена по меньшей мере из двух продольных балок, удаленных друг от друга и соединенных друг с другом по меньшей мере одной поперечной балкой, а связующий элемент выполнен с опорой на заднюю раму, связывая ее с центральной точкой упомянутой поперечной балки.
Пара опорных звеньев связана с рамой подъемного устройства по меньшей мере одним упругим элементом, позволяющим осуществлять наклон и/или поворот этой пары звеньев относительно рамы подъемного устройства.
Упомянутый упругий элемент выполнен подпружиненным для осуществления наклона и/или поворота упомянутой пары звеньев относительно рамы подъемного устройства и восстановления их положения.
Упругий элемент выполнен из резины или представляет собой пружину.
По меньшей мере два упругих элемента, смонтированных в подвеске, осуществляемой через связующий элемент по меньшей мере одной пары опорных звеньев расположены с каждой стороны подъемного устройства и соединены с продольными балками.
По меньшей мере, одна пара опорных звеньев оснащена четырьмя упругими элементами, смонтированными по углам с каждой из сторон подъемного устройства между продольными балками и опорами, продольно выступающими из телескопических штанг в противоположных друг другу направлениях.
Для управления элементами перемещения между рамой и общей балкой размещен привод в виде гидравлического цилиндра или преимущественно пары гидравлических цилиндров, расположенных с каждой стороны относительно оси поворота пары опорных звеньев.
Наиболее важные преимущества, заложенные в подъемном устройстве настоящего изобретения, включают простоту и надежность конструкции и управления. Такое подъемное устройство обладает возможностью удобного управления перемещениями подвижного элемента вплоть до его контакта с подъездными путями, например осуществляя спуск с транспортной платформы на подъездные пути, используя собственные подъемные элементы. Мощность такого подъемного устройства может быть оптимизирована, т.к. действия подъемных и перемещающих элементов направлены на совершение строго согласованных действий, что в свою очередь предотвратит нежелательные воздействия собственных реакционных моментов и сил. Особенно в случае использования подъемного устройства, снабженного двумя последовательными парами опорных звеньев, условия функционирования подъемного устройства будут наилучшими, т.к. с точки зрения маневренности, в зависимости от условий, задняя пара приобретает возможность независимого позиционирования при перемещениях подвижного элемента. Так, подъемное устройство настоящего изобретения приобретает возможность перемещать подвижные элементы в вертикальном и горизонтальном измерениях относительно подъездных путей как находясь на подъездных путях, так и опираясь только на поверхность земли.
Вышеприведенные дополнительные усовершенствования подъемного устройства отражают некоторые из возможных конкретных его реализаций.
В последующем описании изобретение будет детально рассмотрено со ссылками на прилагаемые чертежи, на которых:
фиг. 1 представляет вид сбоку одной из возможных интерпретаций предлагаемого подъемного устройства, установленного на транспортной платформе;
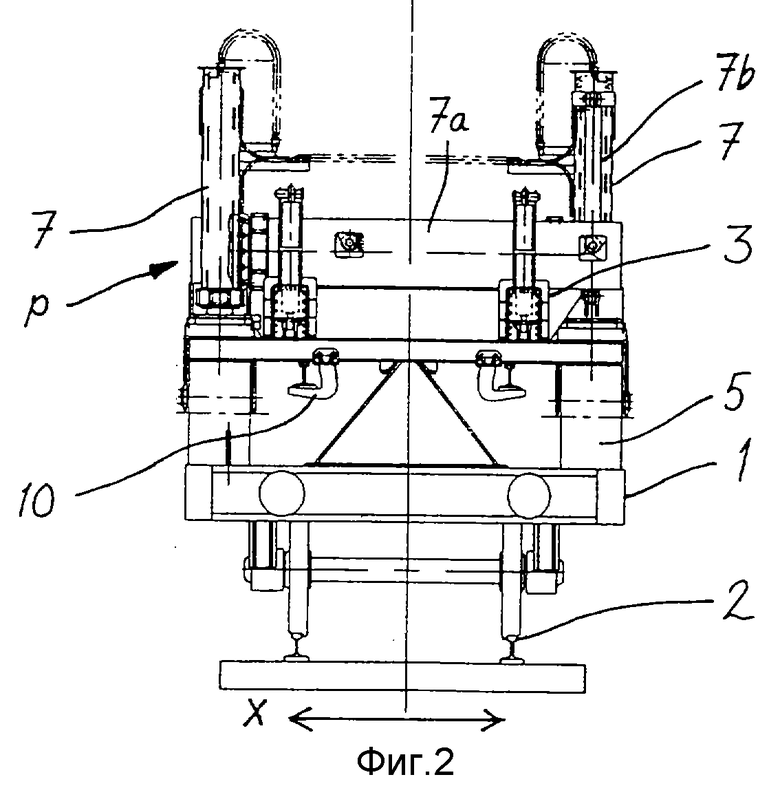
фиг.2 - торцевой вид соответствующего подъемного устройства;
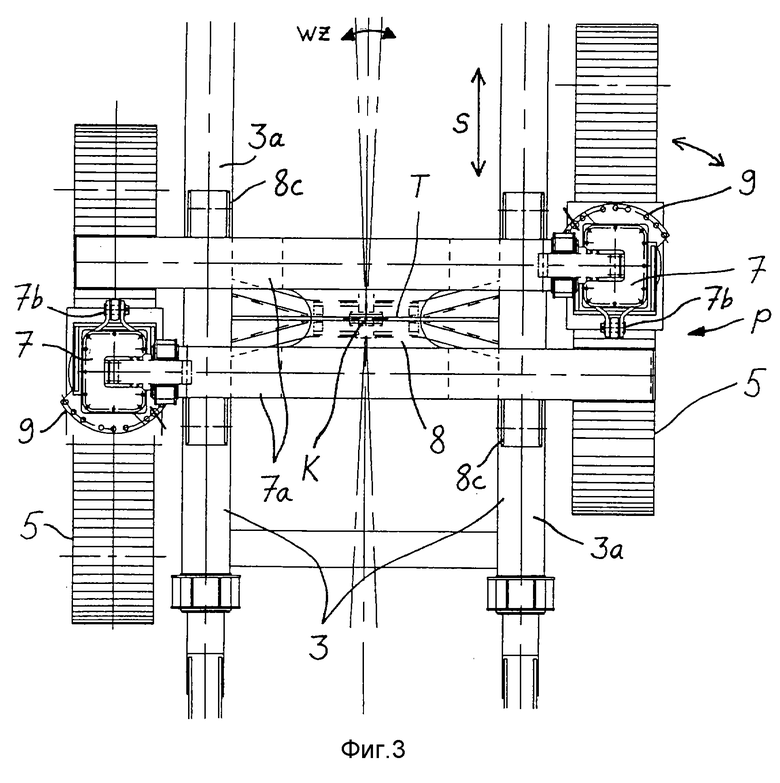
фиг.3 представляет вид сверху пары опорных звеньев;
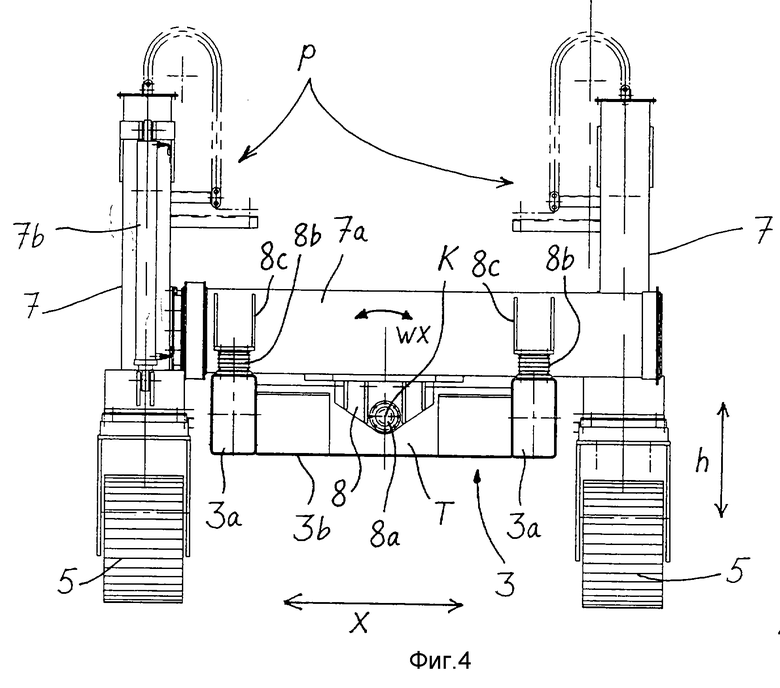
фиг.4 - торцевой вид соответствующей пары;
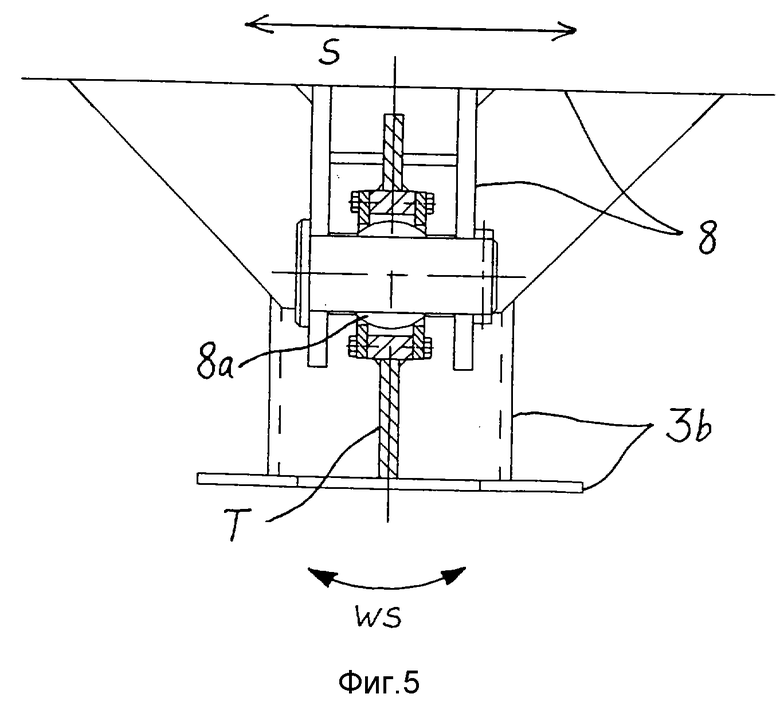
фиг. 5 - поперечное сечение устройства связующего элемента, использованное в вышерассмотренной паре;
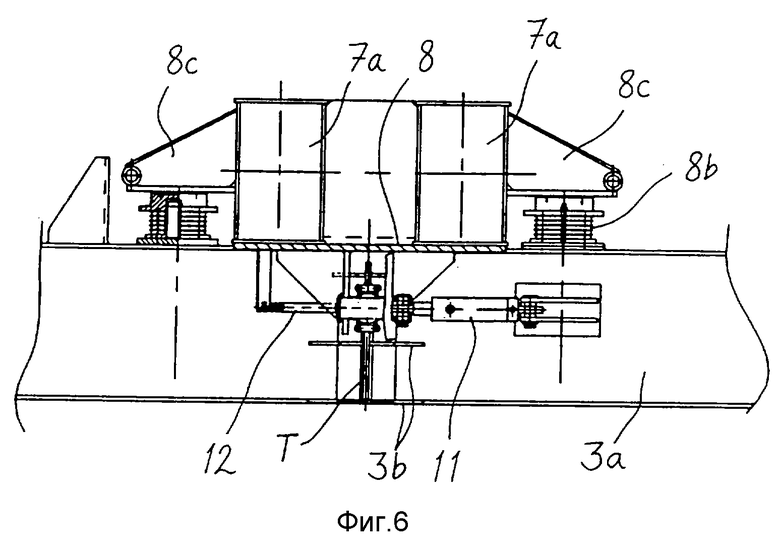
фиг.6 представляет продольное сечение одной из преимущественных схем управления подъемным устройством.
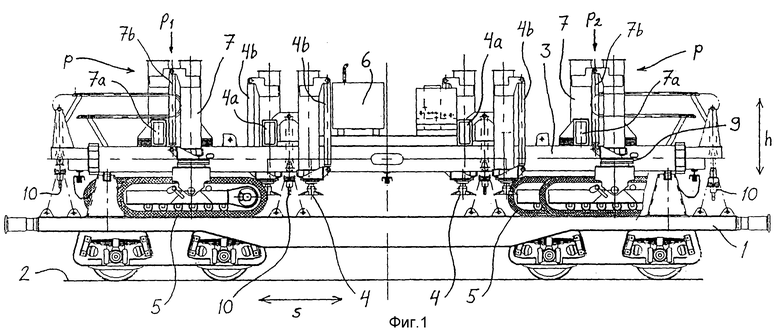
Обращаясь к фиг.1 и 2, изображенное на них подъемное устройство, предназначенное для управления перемещениями подвижного элемента, транспортируют к месту проведения работ на транспортной платформе 1, являющейся составной частью транспортного средства. Подъемное устройство, самостоятельно или совместно с несколькими другими подъемными устройствами, предназначено для погрузочно-разгрузочных операций с одним или несколькими подвижными элементами в месте проведения работ над поверхностью подъездных путей 2 в вертикальном и горизонтальном измерениях с помощью подъемных элементов 4 и элементов перемещения 5, включенных в состав рамы подъемного устройства 3 и приводимых в действие вспомогательной силой, преимущественно гидравлического вида. С этой целью, рама 3 оснащена средствами привода и энергетики 6, такими как гидравлический привод и пульт управления или им подобными устройствами. Рама 3 оснащена по крайней мере одним, преимущественно, как показано на фиг.1, двумя последовательными парами p1, p2 опорных звеньев 7 в продольном измерении рамы, при этом упомянутые звенья имеют возможность выдвигаться в поперечном измерении x рамы 3 и снабжены упомянутыми элементами перемещения 5, такими как колеса, гусеницы или им подобными устройствами для перемещения рамы по поверхности земли. Так, с целью обеспечения возможности выдвижения опорных звеньев 7, рама 3 оснащена для каждой пары p1, p2 в основном поперечными телескопическими штангами 7а, смонтированными последовательно в продольном измерении s рамы 3 и расположенными сверху по длине рамы 3. Подъемные элементы 4, способные выполнять функции опоры, подъема и спуска всего подъемного устройства, присоединены к поперечным телескопическим штангам 4а, смонтированным в верхней части рамы для смещения упомянутых элементов в боковых направлениях.
На фиг.1 и 2 также показаны захваты 10, подвижные в поперечном измерении и смонтированные в нижней части по длине рамы 3 для транспортной фиксации подвижных элементов.
В транспортном положении, как показано на фиг.2, элементы перемещения 5 подъемного устройства, размещенного на транспортной платформе 1, убраны на поверхность транспортной платформы 1 и выдвигаются за ее пределы в момент проведения рабочих операций. В соответствии с фиг. 3-5, пара p опорных звеньев 7, смонтированная на каждом из противоположных концов рамы подъемного устройства, соединена с рамой 3 через общую балку 8, соединяющую последовательно размещаемые телескопические штанги 7а в единую рамную конструкцию, при этом балка 8 подвижно закреплена на раме 3 с возможностью осуществления шарнирного движения, наподобие наклона wx, ws и/или поворота wz пары p опорных звеньев 7. Так, рама 3 размещается ниже рамных конструкций, образуемых телескопическими штангами 7а последовательно размещенных пар p1, p2.
Обращаясь, в частности, к фиг. 3-5, элементы перемещения 5 подъемного устройства выполнены подвижными относительно опорных звеньев 7 с использованием подъемных элементов 7b, размещенных между опорными звеньями 7 и элементами перемещения 5, осуществляющих подъем элементов перемещения 5 в основном в вертикальном измерении h, например для изменения клиренса с землей рамы 3 подъемного устройства. В добавление, а также для пояснения фиг. 3, подъемное устройство включает направляющие элементы 9 для осуществления поворота элементов перемещения 5 в горизонтальной плоскости, а также для блокирования возможности отклонения от заданной продольной траектории s движения подъемного устройства. Например, гусеницы, выполняющие функцию элементов перемещения, могут быть повернуты перпендикулярно по отношению к продольному измерению s, тем самым позволяя подъемному устройству двигаться в стороны. Балка 8, соединяющая опорные звенья 7, имеет силовое соединение с рамой подъемного устройства 3 через связующий элемент 8а, осуществляющего подвеску пары p опорных звеньев 7 в практически вертикальном измерении h, обеспечивая возможность наклона wx, ws и поворота wz. Таким образом, рама 3 имеет возможность качания около двух взаимно перпендикулярных горизонтальных осей и поворота в горизонтальной плоскости вокруг вертикальной оси относительно балки 8. На фиг.5, в частности, показан связующий элемент 8а в виде шарового шарнира, располагаемого в центральной точке K пары p опорных звеньев 7, как правило, на центральной оси подъемного устройства.
Как показано на фиг.4, балка 8 соединена сварным соединением к нижней поверхности телескопических штанг 7а, тем самым осуществляя связь пары p опорных звеньев 7 с подъемным устройством через шаровой шарнир 8a, размещаемый между балкой 8 и задней рамой T, являющейся составной частью рамы подъемного устройства 3.
В основном на фиг.3 и 4 показано, что рама подъемного устройства 3 включает две продольных балки 3a, удаленных друг от друга и проходящих, как правило, в продольном направлении s подъемного устройства, при этом упомянутые балки соединены друг с другом одним или несколькими поперечными балками 3b, выступающими в поперечном измерении x. Так, шарнир 8a установлен на поперечную заднюю раму T, связывая центральную точку поперечной балки 3b, соединяющую упомянутые продольные балки 3а рамы 3 подъемного устройства.
Другой пример конкретного исполнения включает по крайней мере одну пару p опорных звеньев 7, соединяемую с рамой подъемного устройства 3 через по крайней мере один упругий элемент 8b, позволяющий качание wx, ws и/или поворот wz упомянутой пары p относительно рамы подъемного устройства 3. Действие данного упругого элемента 8b преимущественно автоматическое с использованием пружины, обеспечивая тем самым подвижность пары p опорных звеньев 7 с одной стороны и восстановление первоначального положения пары p относительно рамы подъемного устройства 3 с другой.
Упругий элемент 8b преимущественно представляет собой резиновую или металлическую пружину или аналогичное устройство для обеспечения функций качания ws, wx и вращения wz для пары p, при этом пружина работает пропорционально отклоняющему усилию по восстановлению первоначального положения пары р. На фиг.3 и 4, в частности, показана пара p опорных звеньев 7, снабженная четырьмя упругими элементами 8b, смонтированных в углах каждой из сторон подъемного устройства. В иллюстрируемом примере, упругие элементы 8b расположены во встречных направлениях по длине s, в основном между первичными балками 3а и опорами 8c, выступающими из телескопических штанг 7a.
Изменение направления элементов перемещения 5 может быть осуществлено также гидравлическими цилиндрами, как показано на фиг.6. Верхние поверхности упругих элементов 8b, смонтированных снизу опор 8c снабжены пластиковыми скользящими прокладками, осуществляющими скольжение по отношению к телескопическим штангам 7a. Пружины фиксируют штифтами, закрепляемыми на верхней поверхности первичных балок 3а.
Пара p поворачивается в горизонтальной плоскости по отношению к раме 3 двумя гидравлическими цилиндрами 11, установленными между продольными балками 3а и балкой 8 и управляемыми от общего клапана управления. Система включает также линейный манометрический преобразователь 12, постоянно дающий информацию о положении пары p опорных звеньев 7, а следовательно, и о положении элементов перемещения 5 по отношению к раме 3. Управляющий сигнал поступает на гидравлический клапан одновременно с пульта управления, задаваемый оператором и от линейного преобразователя. Сравнивая эти сигналы, система автоматически поддерживает заданное с пульта направление элементов перемещения, выполненных, например, в виде гусениц.
Очевидно, что подъемное устройство настоящего изобретения не ограничивается описанными выше примерами исполнения, но может быть развито и другими модификациями, укладывающимися в рамки основного изобретательского замысла. Действительно, подъемное устройство настоящего изобретения может быть оснащено дополнительными ребордными колесами для перемещения подъемного устройства непосредственно по имеющимся подъездным путям, тем самым как бы оснащая подвижный элемент, предназначенный для перемещения, такими колесами. Совершенно необязательно оснащать описываемое подъемное устройство отдельными подъемными элементами 4, как показано на фиг.1, которые осуществляют опору на поверхность земли и приводятся в действие гидравлическими цилиндрами 4b в вертикальном направлении по отношению к раме 3. Подъемные элементы 4 могут быть замещены большей нагрузкой в вертикальном направлении на подъемные элементы 7b, выполняемые в виде гидравлических цилиндров, воздействующих на упомянутые элементы перемещения 5. В этом случае, однако, устойчивость опоры подъемного устройства на поверхность земли оказывается недостаточной, например, будет возможно боковое смещение подъемного устройства при альтернативном использовании в качестве опоры подъемных элементов 4 и элементов перемещения 5. Кроме этого, отдельные подъемные цилиндры 4b позволяют производить изменение положения направляющих элементов во время действия опоры подъемных цилиндров.
Практически, при выполнении одной и той же операции двумя и более подъемными устройствами, последние гидравлически соединены для пространственного перераспределения усилия воздействия, тем самым позволяя автоматически осуществлять управление подъемными устройствами. Подобные схемы могут быть построены по принципу, например, приема-передачи или любым аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| ПЛАВУЧЕЕ СРЕДСТВО ГУСЕНИЧНОГО ТИПА С ЗЕМЛЕРОЙНЫМ ОБОРУДОВАНИЕМ | 2016 |
|
RU2612548C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ И ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1992 |
|
RU2072015C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| ПОСТ РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ РАБОЧЕЙ МАШИНЫ | 1994 |
|
RU2139801C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ С ШАГАЮЩИМИ ЗВЕНЬЯМИ | 2004 |
|
RU2362703C2 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| АВТОМАТИЗИРОВАННАЯ СТОЯНКА ДЛЯ АВТОМОБИЛЕЙ | 2017 |
|
RU2641155C1 |
Подъемное устройство предназначено для погрузки и выгрузки подвижного элемента в месте проведения работ над поверхностью подъездного пути в вертикальном и горизонтальном направлениях посредством подъемных элементов и элементов перемещения. Устройство содержит раму, оснащенную двумя парами опорных звеньев, имеющих возможность перемещения относительно друг друга для изменения поперечного размера между опорами рамы при помощи одной пары раздвигающихся поперек устройства телескопических штанг и имеющих элементы перемещения рамы по поверхности земли. Элементы перемещения выполнены с возможностью размещения в транспортном положении на транспортной платформе, а при работе - раздвижения за пределы платформы. Крепление одной пары опорных звеньев на подъемном устройстве выполнено на балке, подвижно закрепленной на раме подъемного устройства с возможностью наклона и/или поворота пары опорных звеньев относительно рамы. Обеспечивается качественное улучшение устройства. 11 з.п.ф-лы, 6 ил.