Изобретение относится к области геофизического приборостроения и может быть использовано для регистрации приливных и тектонических деформаций земной поверхности, прогнозирования землетрясений, при поиске и оконтуривании нефтегазовых месторождений и геофизическом мониторинге крупных гидросооружений и других промышленных объектов.
Известен наклономер, включающий основание, чувствительную систему, состоящую из маятника с зеркалом на подвесе, фотопреобразователь, устройство для эталонирования, выполненное из пережима, рамки подвеса чувствительной системы, пружины, микрометра, зеркала, жестко закрепленного на расстоянии от зеркала маятника и фотопреобразователя на вертикально расположенной оси вращения, поворотный рычаг, жестко соединенный с осью и микрометром, регистратор (см. а. с. СССР 828154, кл. G 01 V 7/02, опубл. 1981). Этот наклономер имеет низкую точность измерения из-за дрейфа нульпункта прибора и необходимости подхода оператора к наклономеру при его эталонировании. Дрейф пульпункта наклономера возникает из-за большой деформации пружины. Подход оператора к прибору приводит к нарушению температурного режима и искажениям в показаниях наклономера.
Известен наклономер, включающий пережим, рамку подвеса маятника, блок управления, рамку с упругими нитями, герметичный капилляр с закрепленными вертикально на его концах двумя магнитными стержнями с соленоидами по их осям и металлический шарик, размещенный в капилляре (см. а.с. СССР 830272, опубл. 1981). Однако данный наклономер имеет низкую точность определения масштаба записи. При изменении широты пункта наблюдения будет изменяться и угол наклона капилляра при смещении шарика из-за изменения абсолютного значения ускорения силы тяжести, будет изменяться весовой момент шарика. Это снижает точность определения масштаба записи наклономера до 0,5%. Помимо этого, закручивание нитей подвеса капилляра при смещении шарика в капилляре приводит к дрейфу нульпункта наклономера, что снижает точность определения масштаба записи и затрудняет поиск предвестников землетрясений.
Наиболее близким к предлагаемому изобретению является наклономер, включающий основание, горизонтально установленный маятник, подвешенный на упругих нитях в вертикально расположенной монтажной рамке, закрепленный на конце маятника блок эталонирования, выполненный в виде двух установленных на технологическом стержне горизонтально и перпендикулярно оси маятника постоянных магнитов и двух последовательно соединенных соленоидов, расположенных на одном из магнитов соосно его оси, блок фотоэктрического преобразователя угловых смещений маятника, состоящий из осветителя, вертикально установленного на маятнике зеркала, электронного узла и регистратора, и блок питания, соединенный с блоком эталонирования (см. а.с. СССР 1087944, опубл. 1984).
Однако данный наклономер имеет низкую точность измерения, т.к. при изменении периода собственных колебаний маятника изменяется электродинамическая постоянная блока эталонирования на 5-6%, что влияет на точность эталонирования, а следовательно, и точность измерений. Помимо этого, при наклонах земной поверхности в азимуте оси маятника происходит смещение оси магнита относительно оси соленоидов, что также изменяет электродинамическую постоянную блока эталонирования и снижает точность измерений. Использование двух магнитов блока эталонирования, разнесенных на расстояние 10 мм друг от друга, приводит к помехам в записи наклономера при больших градиентах земного и техногенных магнитных полей.
Предлагаемым изобретением решается задача повышения точности измерения за счет полного исключения влияния земного и техногенных магнитных полей и их градиентов и повышения точности определения масштаба записи наклономера.
Для достижения этого технического результата наклономер, включающий основание, горизонтально установленный маятник, подвешенный на упругих нитях в вертикально расположенной монтажной рамке, закрепленный на конце маятника блок эталонирования, выполненный в виде двух установленных на технологическом стержне горизонтально и перпендикулярно оси маятника и двух последовательно соединенных соленоидов, расположенных на одном из магнитов соосно его оси, блок фотоэлектрического преобразователя угловых смещений маятника, состоящий из осветителя, вертикально установленного на маятнике зеркала, электронного узла и регистратора, и блок питания, соединенный с соленоидами блока эталонирования, снабжен закрепленным при помощи технологического стержня на нижнем конце монтажной рамки горизонтально и перпендикулярно оси маятника дополнительным блоком эталонирования, выполненным в виде капилляра с размещенным внутри него постоянным стержневым магнитом и намотанным на нем соленоидом, установленной горизонтально и параллельно оси маятника рамкой с коническими пережимами, верхний конец которой жестко соединен с основанием, а нижний - с верхним концом монтажной рамки и дополнительным постоянным магнитом, закрепленным на технологическом стержне основного блока эталонирования параллельно основным постоянным магнитам, при этом соленоиды расположены на среднем постоянном магните, крайние постоянные магниты имеют одинаковые магнитные моменты, а магнитный момент среднего постоянного магнита равен сумме магнитных моментов крайних постоянных магнитов и полюса крайних постоянных магнитов развернуты на 180o относительно полюсов среднего постоянного магнита.
Отличительные признаки предлагаемого наклономера от указанного вышеизвестного, наиболее близкого к нему, являются наличие дополнительного блока эталонирования и его выполнение, рамки с коническими пережимами и выполнение основного блока эталонирования. Основной блок эталонирования позволяет полностью исключить влияние магнитного поля Земли и его градиентов, а также влияние техногенных магнитных полей на положение маятника наклономера, что повышает точность измерения. Это достигается тем, что в магнитную систему основного блока эталонирования введен третий постоянный магнит, расположенный в средней части магнитной системы, причем магнитные моменты крайних магнитов равны и сумма их магнитных моментов равна магнитному моменту среднего магнита, а полюса крайних магнитов развернуты на 180o относительно полюсов среднего магнита и соленоиды основного блока эталонирования размещены соосно оси среднего магнита таким образом, чтобы концы среднего магнита были размещены в средней части соленоидов когда ось маятника выведена точно в азимут наблюдения (в нулевое положение, когда сигнал на выходе электронного узла фотоэлектрического преобразователя равен нулю). Дополнительный блок эталонирования позволяет с высокой точностью определять масштаб записи наклономера при регистрации приливных наклонов Земли за счет того, что жесткое соединение капилляра с монтажной рамкой полностью исключает влияние ускорения силы тяжести на величину угла наклона монтажной рамки при смещении магнита в капилляре, т.к. изменение центра масс монтажной рамки остается постоянным при любом значении ускорения силы тяжести на пунктах наблюдений. Отсутствие закрученных нитей подвеса капилляра обеспечивает неизменность нульпункта наклономера. Рамка с коническими пережимами, расположенная параллельно оси маятника, позволяет задавать, наклон монтажной рамке при смещении магнита в капилляре только относительно конических пережимов в вертикальной плоскости перпендикулярной оси маятника, что способствует повышению точности измерения.
На чертеже приведена принципиальная схема предлагаемого наклономера.
Наклономер включает основание 1, рамку 2 с коническими пережимами 3, верхний конец которой жестко соединен с основанием 1, а нижний - с верхним концом монтажной рамки 4, расположенной вертикально. В монтажной рамке 4 подвешен на упругих нитях 5 маятник 6, установленный горизонтально. Рамка 2 установлена горизонтально и параллельно оси маятника 6. На конце маятника 6 закреплен основной блок эталонирования, выполненный в виде трех установленных на технологическом стержне 7 горизонтально и перпендикулярно оси маятника 6 параллельных магнитов 8 и двух последовательно соединенных соленоидов 9, расположенных на среднем постоянном магните 8 соосно его оси. Крайние постоянные магниты 8 имеют одинаковые магнитные моменты. Магнитный момент среднего постоянного магнита 8 равен сумме магнитных моментов крайних постоянных магнитов 8, а полюса крайних постоянных магнитов 8 развернуты на 180o относительно полюсов среднего постоянного магнита 8, длина которого вдвое больше длин каждого из крайних магнитов. Расстояние между осями постоянных магнитов 8 не более 5 мм. Соленоиды 9 посредством технологического стержня 10 жестко соединены с рамкой 2. На нижнем конце монтажной рамки 4 посредством технологического стержня 11 закреплен горизонтально и перпендикулярно оси маятника 6 дополнительный блок эталонирования, выполненный в виде герметичного капилляра 12 с размещенным внутри него постоянным магнитом 13 и намотанным ни нем соленоидом 14. Блок фотоэлектрического преобразователя угловых смещений маятника 6 состоит из осветителя 15, вертикально установленного на маятнике 6 зеркала 16, электронного узла 17, выход которого подключен к регистратору 18. Питание лампы осветителя 15 и электронного узла 17 осуществляется от блока питания 19. Блок питания 19 соединен с соленоидами 9 через цифровой вольтметр 20 и магазин сопротивлений 21 и соленоидом 14.
Наклономер работает следующим образом.
На пункте наблюдении наклономер устанавливается на бетонном постаменте. Подключается блок питания 19 наклономера к сети переменного тока на 220 В или к сети постоянного тока на 24 В. Включается питание лампы осветителя 15 наклономера (2 В постоянного тока) и электронного узла 17 (24 В постоянного тока). На выход электронного узла 17 подключается регистратор 18. Наклономер при помощи установочных винтов (на чертеже не показано) выводится в нулевое положение, при таком положении ток в цепи регистратора 18 равен нулю. Задается период собственных колебаний маятника наклономера винтом чувствительности (не показано) основания наклономера около 4 с. На магазине сопротивлений 21, включенном в цепь соленоидов 9 основного блока эталонирования наклономера, задается сопротивление 4000 Ом. От блока питания 19 в цепь соленоидов 9 подается 2 В постоянного тока, что контролируется пятиразрядным цифровым вольтметром 20, включенным в цепь соленоидов 9. При этом магнитное поле соленоидов 9 воздействует на средний постоянный магнит 8 основного блока эталонирования и маятник 6 наклономера отклонится на некоторый угол от нулевого положения, причем знак отклонения маятника будет зависеть от полярности подключения соленоидов 9. Установочными винтами основания наклономера маятник 6 снова приводится и нулевое положение (или близкое к нулевому). При наклоне постамента маятник 6 будет отклонятся от нулевого положения и в цепи регистратора 18 появится электрический сигнал, пропорциональный углу отклонения маятника 6. Наклономер начинает регистрировать наклоны постамента в заданном азимуте. Обычно на постамент устанавливают два наклономера в азимутах север-юг (С-Ю) и восток-запад (В-З) для того, чтобы знать не только составляющие наклонов по С-Ю и В-З, но и векторный ход наклонов постамента. Показания наклономера при периоде собственных колебаний маятника 6 4 с линейны в пределах ±20 с дуги. Электродинамическая постоянная основного блока эталонирования, Im, порядка 50 мс дуги/мкА, поэтому при напряжении 2 В в цепи соленоидов 9 и сопротивлении на магазине 21 сопротивления 4000 Ом наклономер может работать в пределах ± 10 с дуги. При наклонах постамента более +10 с дуги необходимо заново установить наклономер, как описано выше, при наклонах более 10 с дуги необходимо сменить полярность питания соленоидов 9 основного блока эталонирования наклономера.
Для того чтобы знать масштаб записи наклономера, необходимо наклономер проэталонировать. Для этого, зная сопротивление цепи соленоидов 9 (на магазине сопротивлений 21 и сопротивление соленоидов 9), напряжение, поданное в цепь соленоидов 9 (по цифровому вольтметру 20), можно определить начальный ток I1 в цепи соленоидов 9. Затем изменяют величину сопротивления цепи соленоидов 9 (на магазине сопротивлении 21). При этом на регистраторе 18 изменится отсчет на ΔS. Определяют новое значение тока I2 в цепи соленоидов 9 и изменение тока ΔI. Используя известные величины Im,ΔI,ΔS определяют масштаб записи наклономера К
Эта величина при аналоговой записи выражается в мм/м дуги и при цифровой - в байтах/м дуги, если регистрация ведется на компьютере.
Дополнительный блок эталонирования позволяет наклонять монтажную рамку 4 подвеса маятника 6 на некоторый угол α (порядка 0,15-0,20 с дуги) смещением магнита 13 из одного в другой конец капилляра 12. Для этой цели в цепь соленоида 14 на 1 с подается ток от блока 19 соответствующей полярности (2 В постоянного тока). Магнит смещается в другой конец капилляра 12, что приводит к смещению центра масс монтажной рамки 4 и рамка наклоняется в азимуте, перпендикулярном оси маятника 6 на некоторый угол α. Наклон монтажной рамки 4 приводит к отклонению маятника 6 на некоторый угол θ и кривая наклона, регистрируемая регистратором 18, сместится на некоторую величину ΔS1, откуда определяется масштаб записи наклономера 
Электродинамическая постоянная Im основного блока эталонирования и угол наклона монтажной рамки α дополнительного блока эталонирования определяются при изготовлении наклономера.
Предлагаемый наклономер позволяет повысить точность измерения за счет полного исключения влияния магнитного поля Земли и техногенных магнитных полей, а также их градиентов на показания наклономера и повысить точность определения масштаба записи наклономера.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОБАРОГРАФ | 2002 |
|
RU2231032C1 |
| Наклономер | 1983 |
|
SU1087944A1 |
| ГРАВИМЕТР | 2007 |
|
RU2345387C1 |
| ДЕФОРМОГРАФ | 2005 |
|
RU2298814C1 |
| ДЕФОРМОГРАФ | 2009 |
|
RU2386150C1 |
| ГРАВИМЕТР | 2008 |
|
RU2370794C1 |
| Наклономер | 1979 |
|
SU828154A1 |
| Устройство для дистанционного управления и определения масштаба записи приливного гравиметра | 1978 |
|
SU741220A1 |
| Устройство для эталонированияСЕйСМОНАКлОНОМЕРА | 1979 |
|
SU830272A1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 1996 |
|
RU2099751C1 |
Использование: геофизическое приборостроение для регистрации приливных и тектонических деформаций земной поверхности, прогнозирования землетрясений, при поиске и оконтуривании нефтегазовых месторождений и геофизическом мониторинге крупных гидросооружений и других промышленных объектов. Сущность: наклономер включает основание, рамку с коническими пережимами, верхний конец которой жестко соединен с основанием, а нижний - с верхним концом монтажной рамки, расположенной вертикально. В монтажной рамке подвешен на упругих нитях маятник, установленный горизонтально. Рамка установлена горизонтально и параллельно оси маятника. На конце маятника закреплен основной блок эталонирования, выполненный в виде трех установленных на технологическом стержне горизонтально и перпендикулярно оси маятника параллельных постоянных магнитов и двух последовательно соединенных соленоидов, расположенных на среднем постоянном магните соосно его оси. Крайние постоянные магниты имеют одинаковые магнитные моменты. Соленоиды при помощи технологического стержня жестко соединены с рамкой. На нижнем конце монтажной рамки посредством технологического стержня жестко закреплен горизонтально и перпендикулярно оси маятника дополнительный блок эталонирования, выполненный в виде герметичного капилляра с размещенным внутри него постоянным магнитом и намотанным на нем соленоидом. Блок фотоэлектрического преобразователя угловых смещений маятника состоит из осветителя, вертикально расположенного на маятнике зеркала, электронного узла, выход которого подключен к регистратору. Технический результат: повышение точности измерений и определение масштаба записи наклономера. 1 ил.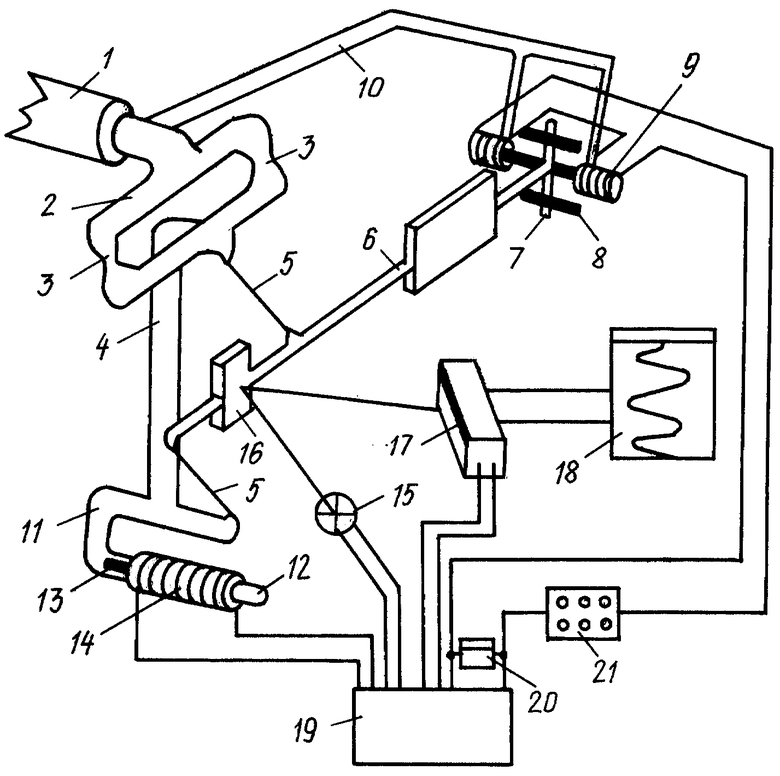
Наклономер, включающий основание, горизонтально установленный маятник, подвешенный на упругих нитях в вертикально расположенной монтажной рамке, закрепленный на конце маятника блок эталонирования, выполненный в видео двух установленных на технологическом стержне горизонтально и перпендикулярно оси маятника постоянных магнитов и двух последовательно соединенных соленоидов, расположенных на одном из магнитов соосно его оси, блок фотоэлектрического преобразователя угловых смещений маятника, состоящий из осветителя, вертикально установленного на маятнике зеркала, электронного узла и регистратора, и блок питания, соединенный с блоком эталонирования, отличающийся тем, что он снабжен закрепленным на нижнем конце монтажной рамки горизонтально и перпендикулярно оси маятника дополнительным блоком эталонирования, выполненным в виде капилляра с размещенным внутри него постоянным магнитом и намотанным на нем соленоидом, установленной горизонтально и параллельно оси маятника рамкой с коническими пережимами, верхний конец которой жестко соединен с основанием, а нижний конец - с верхним концом монтажной рамки, и дополнительным постоянным магнитом, закрепленным на технологическом стержне основного блока эталонирования параллельно основным постоянным магнитам, при этом соленоиды расположены на среднем постоянном магните, крайние постоянные магниты имеют одинаковые магнитные моменты, магнитный момент среднего постоянного магнита равен сумме магнитных моментов крайних постоянных магнитов, а полюса крайних постоянных магнитов развернуты на 180o относительно полюсов среднего постоянного магнита.
| Наклономер | 1983 |
|
SU1087944A1 |
| Наклономер | 1979 |
|
SU828154A1 |
| Устройство для эталонированияСЕйСМОНАКлОНОМЕРА | 1979 |
|
SU830272A1 |
| Горный компас | 0 |
|
SU81A1 |
| СЕЯЛКА | 1995 |
|
RU2089057C1 |
| US 3926054 А, 16.12.1975. | |||
