Изобретение относится к неразрушающему контролю различных (промышленных, опасных, ценных и др. ) объектов, основанному на регистрации механических возмущений с помощью первичных преобразователей с хранением зарегистрированной информации в памяти автономного регистратора, и может быть использовано, в частности, для контроля нерегламентируемых ударов и вибрации транспортируемых опасных и ценных объектов.
Продолжительность работы регистратора, работающего в автономном режиме, связана с энергопотреблением его электронной части. Обеспечение его долговечности весьма проблематично в условиях ограниченного доступа к контролируемым объектам, без возможности замены батареи питания и, особенно, при контроле перевозимых железнодорожным транспортом грузов.
Данная проблема сопряжена с рядом особенностей такого контроля:
1) энергопотребление регистраторов зависит от сложности обработки сигналов и объема запоминаемой информации и, соответственно, сложности его схемы (количества элементов, требующих питания, напряжения питания и др.). Чем сложнее предварительная обработка сигнала (усиление и преобразование сигнала, сравнение с заданным уровнем, вычисление функций) и больше объем запоминаемой информации, тем выше энергопотребление регистратора и меньше срок его работы в непрерывном режиме без замены батареи питания. В настоящее время сложились тенденции к комплексной (интегральной) оценке состояния контролируемого объекта, требующей проведения сложной обработки сигнала и запоминания, при этом, больших объемов информации. Причем, такая обработка должна производиться непосредственно во время транспортировки груза неквалифицированным обслуживающим персоналом;
2) ограниченное время нахождения обслуживающего персонала рядом с опасным объектом при его осмотре и сборе информации о нерегламентированных нагрузках;
3) осмотр транспортируемого объекта и сбор информации о нерегламентируемых механических возмущениях может осуществляться через достаточно большие промежутки времени.
Решение поставленных задач усложняется еще и проблемами влияния температуры окружающей среды на показания регистратора. Изменение коэффициента преобразования, например, пьезоэлектрических преобразователей из сегнетомягкой пьезокерамики в температурном диапазоне от - 60 до +50 oС может достигать десятки процентов.
Известен автономный запоминающий датчик для измерения пиковых значений ускорения /1/, в корпусе которого размещен запоминающий чувствительный элемент - магнитный крешер. Датчик позволяет долговременно сохранять без потребления электрической энергии зарегистрированное значение ускорения, однако он мало информативен: не измеряет действующую механическую величину, как функцию времени, не регистрирует время появления механических возмущений выше заданного порогового уровня и т.п.
Известно портативное устройство для сбора данных при измерениях различных физических величин /2/, содержащее первичный преобразователь физической величины в электрический сигнал, соединенный кабелем с электронным блоком предварительной обработки сигнала, включающим источник питания, мультиплексор, аналого-цифровой преобразователь (АЦП) и микропроцессор, включающий контроллер, таймер реального времени и запоминающее устройство. Электронный блок предварительной обработки данных (электронный блок) выполнен в отдельном корпусе и может работать независимо от системы окончательной обработки сигналов (компьютера). Источник питания в виде одной или нескольких батарей обеспечивает сохранение измеренных данных в запоминающем устройстве. Регистрацию физической величины портативным прибором осуществляют следующим образом: сигналы первичных преобразователей подают на вход мультиплексора, производят аналого-цифровое преобразование и передают на вход микропроцессора, в оперативном запоминающем устройстве (ОЗУ) которого записывают информацию о регистрируемой величине. При сборе и окончательной обработке измеренных данных портативный прибор соединяют с компьютером и перезаписывают информацию в систему окончательной обработки сигналов. Недостатком данного портативного прибора и способа регистрации физической величины, основанного на использовании портативного прибора в качестве регистратора с хранением информации в ОЗУ, является ограниченный ресурс работы в непрерывном режиме без замены батареи питания.
Задача, решаемая изобретением, направлена на создание способа регистрации механической величины (ускорения, силы, давления и др.) и автономного устройства, реализующего способ, предназначенных для контроля механических возмущений транспортируемых опасных и ценных объектов.
Техническим результатом настоящего изобретения является повышение долговечности работы (времени непрерывной работы без замены батареи питания). Дополнительными техническими результатами являются снижение влияния температуры на показания регистратора и устранение несанкционированного срабатывания (записи механической величины при случайном ударе по регистратору предметами карманного пользования).
Технический результат достигается тем, что в известном способе регистрации механической величины контролируемого объекта в частотном диапазоне от f1 до f2, заключающемся в том, что измеряют механическую величину посредством первичного преобразователя, сигнал с которого преобразуют в цифровой вид с частотой дискретизации fдискр и подают на вход ОЗУ, а при сборе информации о регистрируемой величине ее передают в систему окончательной обработки сигнала, новым является то, что цифровой сигнал сравнивают с пороговым уровнем, в случае недостижения которого преобразование сигнала в цифровой вид производят при отключенном ОЗУ с частотой 2•f2<f<fдискр, а при достижении и превышении указанного уровня сигнал записывают в ОЗУ в течение времени  и перезаписывают с него в электрически программируемое энергонезависимое запоминающее устройство (ЭПЭЗУ), с которого информацию о регистрируемой величине передают в систему окончательной обработки сигнала.
и перезаписывают с него в электрически программируемое энергонезависимое запоминающее устройство (ЭПЭЗУ), с которого информацию о регистрируемой величине передают в систему окончательной обработки сигнала.
Для снижения влияния температуры на пороговый уровень срабатывания регистратора (заданный уровень механических возмущений, при равном или выше которого механические воздействия считаются нерегламентированными и записываются регистратором), дополнительно регистрируют температуру контролируемого объекта с частотой  и корректируют значение порогового уровня сигнала с учетом температурной зависимости коэффициента преобразования первичного преобразователя, записанной в ЭПЭЗУ в виде таблицы или математической формулы.
и корректируют значение порогового уровня сигнала с учетом температурной зависимости коэффициента преобразования первичного преобразователя, записанной в ЭПЭЗУ в виде таблицы или математической формулы.
Для повышения долговечности работы в известном регистраторе, содержащем первичный преобразователь механической величины в электрический сигнал и электронный блок предварительной обработки сигнала, включающий электрический соединитель, источник питания, усилитель, мультиплексор, АЦП и микропроцессор, включающий контроллер, таймер реального времени и ОЗУ, новым является то, что первичный преобразователь механической величины и электронный блок предварительной обработки сигнала объединены в один корпус, в электронный блок дополнительно введено электрически программируемое энергонезависимое запоминающее устройство, вход и выход которого соединены с соответствующими выходом и входом контроллера, а другой выход контроллера соединен с электрическим соединителем, установленным на корпусе с возможностью подключения портативного пульта сбора информации о регистрируемой величине (пульта сбора данных) для передачи ее в систему окончательной обработки сигналов.
Для снижения влияния температуры на показания регистратора в электронный блок дополнительно введен датчик температуры, соединенный с контроллером.
Для нормализации и снижения влияния температуры на показания первичного преобразователя механической величины первичный преобразователь выполнен в виде пьезоэлектрического преобразователя, соединенного с входной цепью усилителя, включающей, по крайней мере, шунтирующий резистор, параллельно которому дополнительно включена подстроечная емкость, величина и температурный коэффициент которой выбраны из условий сохранения заданной частоты f1 и компенсации влияния температуры на коэффициент преобразования пьезоэлектрического преобразователя.
Для устранения несанкционированного срабатывания корпус охвачен оболочкой из эластичного материала, внутренняя часть которой выполнена в виде тонкостенного полого цилиндра, а наружная часть - в виде регулярной шипообразной структуры, при этом шаг L, высота Н, диаметры нижнего D и верхнего d оснований шипов выбраны из условия невозможности случайного касания цилиндра оболочки предметами карманного пользования, причем Н>L>D≥d.
Повышение долговечности работы (времени непрерывной работы без замены батареи питания) достигается экономией электрической энергии во время действия механических нагрузок ниже заданного уровня (нормальных механических нагрузок). На время действия нормальных механических возмущений отключают ОЗУ и производят аналого-цифровое преобразование с меньшей частотой (2•f2<f<fдискр) по сравнению с частотой дискретизации fдискр, с которой производится аналого-цифровое преобразование при записи нерегламентированных нагрузок. Механические возмущения транспортируемого объекта ниже заданного порогового уровня считаются допустимыми, и их запись и обработку не производят. Длительность воздействия таких нагрузок (от нескольких часов до нескольких недель) многократно превышает длительность нерегламентируемых возмущений (до долей секунды). Отключенное на длительное время действие нормальных механических нагрузок ОЗУ и меньший расход электрической энергии при уменьшении частоты аналого-цифрового преобразования позволяют существенно увеличить время непрерывной работы регистратора без замены батареи питания. Нижняя граница частоты аналого-цифрового преобразования при воздействии нагрузок ниже заданного уровня (2•f2) обусловлена минимально допустимой частотой дискретизации, при которой распознаются сигналы колебательного характера в рабочем частотном диапазоне без существенной погрешности. Следует отметить, что погрешность измерения механической величины при частоте аналого-цифрового преобразования 2•f2<f<fдискр получается несколько большей, чем при fдискр, но достаточной для оценки действующих уровней нагрузок.
При появлении механических нагрузок амплитудой, равной и выше заданного уровня (нерегламентированных механических нагрузок), увеличивают частоту аналого-цифрового преобразования до значения fдискр, обеспечивая при этом необходимую точность измерений, и включают ОЗУ, куда записывают информацию в течение времени  а затем перезаписывают в ЭПЭЗУ. После перезаписи информации в ЭПЭЗУ уменьшают частоту аналого-цифрового преобразования и отключают ОЗУ, если механические нагрузки в пределах нормы. При превышении заданного уровня механической нагрузки цикл записи в ОЗУ и перезаписи в ЭПЭЗУ повторяют до тех пор, пока не будет заполнен весь объем памяти ЭПЭЗУ.
а затем перезаписывают в ЭПЭЗУ. После перезаписи информации в ЭПЭЗУ уменьшают частоту аналого-цифрового преобразования и отключают ОЗУ, если механические нагрузки в пределах нормы. При превышении заданного уровня механической нагрузки цикл записи в ОЗУ и перезаписи в ЭПЭЗУ повторяют до тех пор, пока не будет заполнен весь объем памяти ЭПЭЗУ.
Условие минимальной длительности записи сигнала нерегламентированных механических возмущений  обусловлено тем, что закрепленный контролируемый объект даже при однократном механическом воздействии испытывает перегрузки разных знаков: сначала движется в направлении действующей нагрузки, а затем после снятия нагрузки упруго возвращается в исходное состояние и совершает свободные затухающие колебания. В зависимости от габаритов и массы контролируемого объекта, конструкции его крепления (количества элементов крепления, их жесткости и добротности и т.п.) реакция контролируемого объекта на импульсное возмущение может носить разнообразный характер. Амплитуда колебаний контролируемого объекта в противоположном действующей нагрузке направлении не только сравнима с колебаниями в направлении возмущающей силы, но и может быть существенно выше, и особенно, если контролируемый объект установлен на жестких упорах. При этом наиболее опасными для контролируемого объекта, в большинстве случаев, являются низкочастотные колебания (при прочих равных условиях в контролируемый объект поступает больше механической энергии и выше амплитуда колебаний). Поэтому, очень важна запись реакции контролируемого объекта длительностью Тзап, охватывающей, по крайней мере, один полный период колебаний с самой низкой рабочей частотой f1.
обусловлено тем, что закрепленный контролируемый объект даже при однократном механическом воздействии испытывает перегрузки разных знаков: сначала движется в направлении действующей нагрузки, а затем после снятия нагрузки упруго возвращается в исходное состояние и совершает свободные затухающие колебания. В зависимости от габаритов и массы контролируемого объекта, конструкции его крепления (количества элементов крепления, их жесткости и добротности и т.п.) реакция контролируемого объекта на импульсное возмущение может носить разнообразный характер. Амплитуда колебаний контролируемого объекта в противоположном действующей нагрузке направлении не только сравнима с колебаниями в направлении возмущающей силы, но и может быть существенно выше, и особенно, если контролируемый объект установлен на жестких упорах. При этом наиболее опасными для контролируемого объекта, в большинстве случаев, являются низкочастотные колебания (при прочих равных условиях в контролируемый объект поступает больше механической энергии и выше амплитуда колебаний). Поэтому, очень важна запись реакции контролируемого объекта длительностью Тзап, охватывающей, по крайней мере, один полный период колебаний с самой низкой рабочей частотой f1.
Перезапись зарегистрированной информации из ОЗУ в ЭПЭЗУ позволяет долговременно сохранять данные измерений без потребления энергии и отключать ОЗУ во время действия нормальных механических нагрузок. Возможность электрического программирования ЭПЭЗУ позволяет осуществить при сборе данных перезапись информации в систему окончательной обработки сигналов, очистку ЭПЭЗУ и запись в него необходимой для работы информации (температурной зависимости коэффициента преобразования первичных преобразователей в виде таблицы или формулы, момента времени включения рабочего режима регистратора и т.п.). При этом соединение регистратора с пультом сбора данных для дальнейшей передачи зарегистрированной информации в систему окончательной обработки сигналов может осуществляться в любой момент времени в течение всего срока эксплуатации регистратора.
Для снижения влияния температуры на пороговый уровень срабатывания регистратора пороговый уровень корректируют в соответствии с температурной зависимостью коэффициента преобразования первичного преобразователя, заранее записанной в ЭПЭЗУ в виде таблицы или математической формулы. При этом периодичность регистрации температуры контролируемого объекта (окружающей среды) должна быть больше, чем время записи нерегламентированных сигналов Тзап, что позволяет исключить неоднозначность пересчета порогового уровня и одновременно сэкономить расход электрической энергии. Этому способствует медленный характер изменения температуры окружающей среды и большая теплоемкость как контролируемого объекта, так и непосредственно регистратора. Корректировка порогового уровня может производиться как смещением напряжения срабатывания контроллера в соответствии с заданной температурной характеристикой, так и соответствующим изменением коэффициента усиления предварительного усилителя-формирователя. При этом температурная зависимость коэффициента преобразования, записанная в виде таблицы, характеризует индивидуальные свойства первичного преобразователя, а математическая формула - типовые свойства преобразователя. Выбор того или иного вида записи температурной зависимости коэффициента преобразования зависит от требуемой точности температурной корректировки. Например, если температурную зависимость коэффициента преобразования первичного преобразователя с приемлемой точностью можно представить линейной моделью, то корректировку порогового уровня можно производить по формуле:
K=Kнорм•[1+α•(to-tнорм)],
где К - относительная температурная зависимость, в соответствии с которой производится корректировка напряжения срабатывания контроллера или коэффициента усиления предварительного усилителя-формирователя до заданного порогового уровня сигнала;
Кнорм - относительный коэффициент, измеренный в нормальных условиях при температуре tнорм, в большинстве случаев, Кнорм=1;
α - угол наклона прямой температурной зависимости, характеризующий конкретный тип первичного преобразователя, [1/oК];
to - измеренная в процессе эксплуатации регистратора температура окружающей среды (контролируемого объекта), [oК];
tнорм - нормальная температура, при которой производилась калибровка первичного преобразователя, в большинстве случаев, tнорм=293-298 К.
Повышение долговечности работы регистратора для осуществления описанного способа регистрации механической величины достигается введением в электронный блок регистратора ЭПЭЗУ, которое позволяет долговременно сохранять измеренные данные без потребления электрической энергии и отключать ОЗУ на время действия нормальных механических нагрузок. Объединение первичного преобразователя механической величины и электронного блока предварительной обработки сигнала в один корпус позволяет скомпоновать регистратор в приемлемых габаритах, добиться удобства крепления и эксплуатации регистратора на контролируемом объекте и, одновременно, снизить потери электрической энергии в соединительных кабелях, способствуя тем самым повышению долговечности работы регистратора.
Дополнительное введение ЭПЭЗУ, вход и выход которого соединены с соответствующими выходом и входом контроллера, и соединение другого выхода контроллера с электрическим соединителем, установленным на корпусе регистратора с возможностью подключения системы окончательной обработки сигналов, обеспечивают как долговременное сохранение измеренной информации без потребления электрической энергии и возможность отключения на время действия нормальных механических нагрузок ОЗУ, так и перезапись из него измеренной информации в систему окончательной обработки сигналов и запись в него необходимой для работы информации (температурной зависимости коэффициента преобразования, момента времени включения рабочего режима регистратора и др.) из системы окончательной обработки сигналов через портативный пульт сбора данных. Следует отметить, что контроллер микропроцессора может содержать собственную оперативную и долговременную память, обеспечивающие нормальную работу электронного блока (пуск и отключение элементов электронного блока, включая ОЗУ, сравнение измеренного сигнала с пороговым уровнем, перезапись из ОЗУ в ЭПЭЗУ, изменение тактовой частоты, расчеты уровней срабатывания, хранение служебной информации, например, идентификационных кодов и др.), однако запись измеренных данных (механической величины, времени появления нерегламентированных нагрузок и температуры) производится только в ОЗУ с последующей перезаписью через контроллер в ЭПЭЗУ.
Дополнительное введение датчика температуры, выход которого соединен с контроллером, обеспечивает регистрацию температуры контролируемого объекта в момент воздействия нерегламентированных механических нагрузок с целью дальнейшей температурной корректировки записанной информации и одновременно уточнение порогового уровня сигнала с учетом температурной зависимости коэффициента преобразования первичного преобразователя, записанной в ЭПЭЗУ в виде таблицы или математической формулы.
Нормализация коэффициента преобразования и снижение влияния температуры на показания первичного преобразователя механической величины достигаются тем, что первичный преобразователь выполнен в виде пьезоэлектрического преобразователя, соединенного с входной цепью усилителя, включающей, по крайней мере, шунтирующий резистор, параллельно которому дополнительно включена подстроечная емкость, обеспечивающая, одновременно, приведение индивидуальных значений коэффициента преобразования к заданному значению и компенсацию влияния температуры на коэффициент преобразования. При этом выбор первичного преобразователя механической величины на основе пьезоэлектрического эффекта позволяет также увеличить ресурс непрерывной работы регистратора без замены батареи питания, поскольку для пьезопреобразователей не требуется питание.
Наличие шунтирующего резистора во входной цепи усилителя обеспечивает формирование нижней границы рабочего частотного диапазона (f1) и, одновременно, защиту от электрического пробоя входного активного элемента предварительного усилителя-формирователя (транзистора или микросхемы). Через него стекает накопленный пироэлектрический заряд пьезопреобразователя и электрический заряд, возникший на электродах пьезоэлемента при квазистатических механических возмущениях (f<f1). Особенно это важно при отключенном питании усилителя и резких изменениях температуры.
Механизм нормализации и снижения влияния температуры на коэффициент преобразования пьезоэлектрического преобразователя сводится к следующему:
При параллельном подключении ко входу предварительного усилителя-формирователя подстроечной емкости Сn коэффициент преобразования по напряжению ξU на плоской части амплитудно-частотной характеристики равен отношению коэффициента преобразования по заряду (ξQ) к сумме всех электрических емкостей на входе активного элемента предварительного усилителя-формирователя:
где ξU - коэффициент преобразования по напряжению;
ξQ - коэффициент преобразования по заряду;
Cc - емкость пьезоэлектрического преобразователя (емкость пьезоэлемента);
Сn - подстроечная емкость;
Су - входная емкость усилителя.
В большинстве случаев входной емкостью Сy можно пренебречь. Из приведенной зависимости видно, что коэффициент преобразования ξU можно привести к любой норме (к значениям меньшим, чем  ) выбором подстроечной емкости Сn. При этом, если емкость пьезоэлектрического преобразователя Сc существенно меньше подстроечной емкости Сn, то коэффициент преобразования ξU будет определяться только подстроечной емкостью:
) выбором подстроечной емкости Сn. При этом, если емкость пьезоэлектрического преобразователя Сc существенно меньше подстроечной емкости Сn, то коэффициент преобразования ξU будет определяться только подстроечной емкостью:  Очевидно, что в этом случае с целью снижения влияния температуры на коэффициент преобразования ξU относительный температурный коэффициент подстроечной емкости (ТКЕn) следует выбирать равным или близким относительному коэффициенту влияния температуры на коэффициент преобразования по заряду (КQ):
Очевидно, что в этом случае с целью снижения влияния температуры на коэффициент преобразования ξU относительный температурный коэффициент подстроечной емкости (ТКЕn) следует выбирать равным или близким относительному коэффициенту влияния температуры на коэффициент преобразования по заряду (КQ):
где KQ - относительный коэффициент влияния температуры на коэффициент преобразования по заряду;
ТКЕn - относительный температурный коэффициент подстроечной емкости.
В случае же сравнимости значений емкости пьезоэлектрического преобразователя Сc и подстроечной емкости Сn коэффициент преобразования ξU при температуре, отличающейся от нормальной tнорм, будет определяться формулой:
где КС - относительный коэффициент влияния температуры на электрическую емкость пьезоэлектрического преобразователя.
Из приведенной формулы видно, что температурная компенсация осуществляется подбором температурного коэффициента подстроечной емкости ТКЕn из условия равенства:
Откуда:
При условии Сc ≈ Сn выбор коэффициента ТКЕn осуществляется из формулы:
TKEn ≈ 2• KQ - KC.
Выбор значения подстроечной емкости Сn осуществляется из условия сохранения нижней границы рабочего частотного диапазона f1. В общем случае частота f1 определяется на уровне спада амплитудно-частотной характеристики на 3 дБ:
где Rc - сопротивление пьезоэлектрического преобразователя (пьезоэлемента);
Rш - шунтирующий резистор;
Ry - входное сопротивление усилителя.
Откуда
При этом, если емкость пьезоэлектрического преобразователя Сc получается существенно меньше рассчитанной подстроечной емкости Сn, то ею (Сc) можно пренебречь, и окончательными условиями выбора величины Сn и температурного коэффициента подстроечной емкости ТКЕn являются:
TKEn≈KQ
В других случаях
Защита от несанкционированного срабатывания (записи механической величины при случайном ударе по регистратору предметами карманного пользования) обеспечивается демпфированием ударов оболочкой из эластичного материала. При этом конструкция оболочки выполнена такой, чтобы падающие предметы при ударе соприкасались только с шипами оболочки. Причем большая часть кинетической энергии удара трансформируется в потенциальную энергию изгиба шипов, часть превращается в тепло, а остальная, меньшая часть - в потенциальную энергию деформаций корпуса регистратора. Потери кинетической энергии, переходящие в тепловую энергию, связаны с внутренним трением материала оболочки, трением падающего предмета о шипы оболочки, а также - трением оболочки при скольжении по корпусу регистратора и при повороте основания шипов при их изгибе. Изгиб шипов при ударе падающего предмета вызывает их свободные, быстро затухающие колебания и не приводит к деформации корпуса регистратора. Этому способствуют выбранные форма и размеры оболочки: тонкостенность цилиндра оболочки, регулярность шипообразной структуры, коническая или цилиндрическая форма шипов, размеры шипов (H > L > D≥d), обеспечивающие невозможность касания падающим предметом цилиндра оболочки. Следует отметить, что размеры и масса предметов, от действия которых защищает демпфирующая оболочка, ограничены предметами карманного пользования (ключами, ручкой, карманной сумочкой, монетами и т. п.). Очевидно, что от относительно тяжелых тел (сравнимых по массе или более тяжелых, чем регистратор) или быстро летящих предметов, обладающих в момент соприкосновения с оболочкой регистратора относительно большой кинетической энергией, например, брошенный камень, указанная демпфирующая оболочка не защищает. Небольшой части кинетической энергии такого предмета, которая переходит в деформацию корпуса и, соответственно, в колебания первичного преобразователя механической величины, может быть достаточно для срабатывания регистратора и записи ложной информации. Тем не менее, при таком интенсивном ударе защитная демпфирующая оболочка предохраняет регистратор от механических повреждений, а также защищает его от случайных ударов при креплении на контролируемый объект и обслуживании в процессе эксплуатации.
Суть заявляемого способа регистрации механической величины и регистратора для осуществления способа будет ясна из прилагаемых чертежей.
На фиг. 1 изображена структурная схема регистратора ускорений. На ней стрелками  показаны измеренные сигналы; а стрелками (__→) - служебные сигналы (например, управляющие).
показаны измеренные сигналы; а стрелками (__→) - служебные сигналы (например, управляющие).
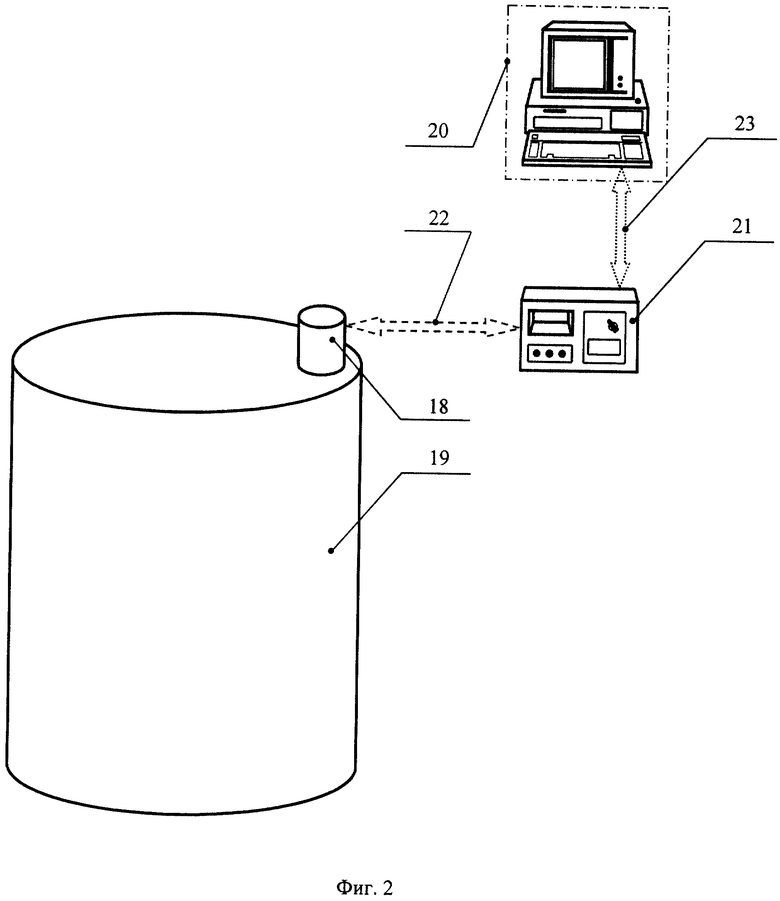
На фиг. 2 изображена блок-схема соединения регистратора с системой окончательной обработки сигналов посредством портативного пульта сбора данных. На фиг. 2 показано: 18 - регистратор механической величины; 19 - контролируемый объект; 20 - система окончательной обработки сигналов; 21 - пульт сбора данных; 22 - интерфейс, связывающий во время периодического сбора данных регистратор и пульт сбора данных; 23 - интерфейс, связывающий во время передачи измеренных данных пульт сбора данных и систему окончательной обработки сигналов (компьютер).
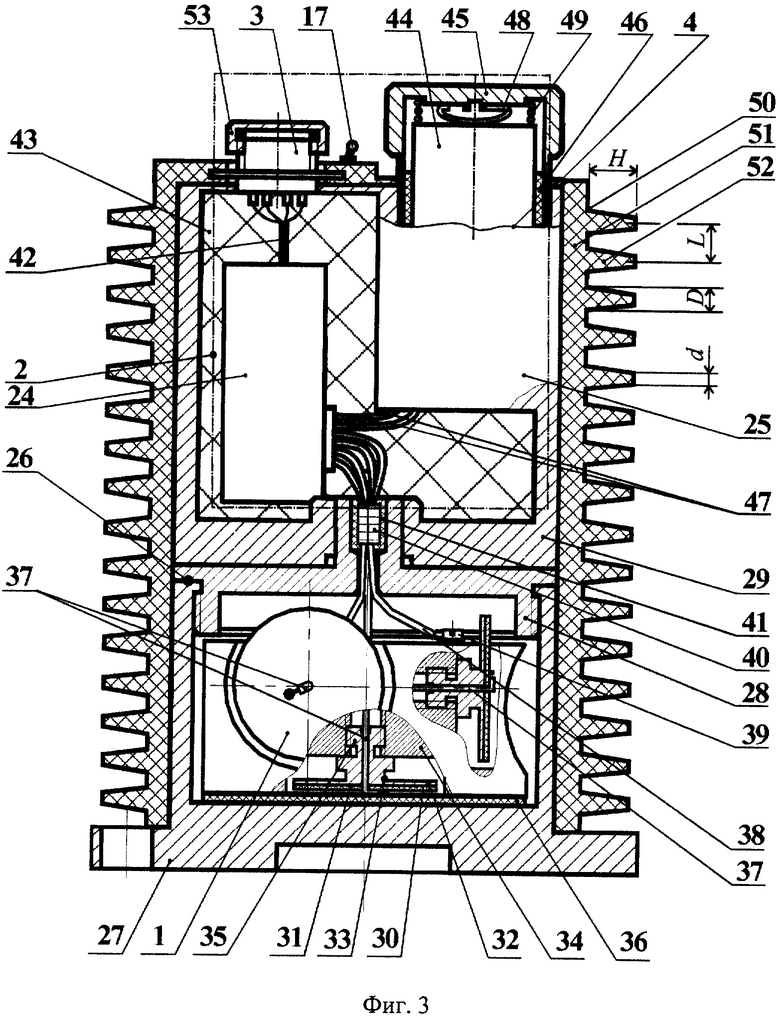
На фиг.3 приведена конструктивная схема регистратора ускорений. На фиг.3 показано: 1 - первичный трехкомпонентный пьезоэлектрический преобразователь ускорения; 2 - электронный блок; 3 - электрический соединитель; 4 - источник питания; 17 - выключатель питания; 24 - сборка печатных плат; 25 - стакан источника питания; 26 - корпус регистратора; 27 - нижняя часть корпуса; 28 - внутренняя крышка корпуса; 29 - верхняя часть корпуса; 30 - чувствительный элемент; 31 - пьезоэлемент; 32 - упругая мембрана; 33 - цилиндрическая опора; 34 - опора преобразователя; 35 - резьбовой хвостовик чувствительного элемента; 36 - изолятор преобразователя; 37 - проводник чувствительного элемента; 38 - проводник опоры преобразователя; 39 - винт; 40 - бандаж; 41 - герметизирующий клеевой слой; 42 - выходной кабель; 43 - герметик; 44 - батарея питания; 45 - колпачок; 46 - эластичная прокладка; 47 - проводник питания; 48 - плоская пружина; 49 - цилиндрическая пружина; 50 - эластичная оболочка; 51 - цилиндр оболочки; 52 - шип оболочки, 53 - крышка соединителя.
Способ регистрации механической величины состоит в том, что измеряют ускорение вибрации контролируемого объекта 19 посредством первичного пьезоэлектрического преобразователя ускорений 1, сигналы с которого передают в электронный блок 2, включающий электрический соединитель 3, источник питания 4, предварительный усилитель - формирователь 6; мультиплексор 7, АЦП 8, микропроцессор 9, датчик температуры 15 и ЭПЭЗУ 16. При этом сигнал пьезоэлектрического преобразователя ускорений 1 подают на входную цепь усилителя 5, включающую параллельно соединенные входу усилителя 6 шунтирующий резистор 10 и подстроечную емкость 11, величина и температурный коэффициент которой выбраны из условий сохранения заданной нижней границы рабочего частотного диапазона (f1) и компенсации влияния температуры на коэффициент преобразования по напряжению преобразователя. Усиленные сигналы передают на вход мультиплексора 7, получающего от контроллера 12 через АЦП 8 тактовые сигналы для открытия соответствующих временных окон по каждому каналу. С выхода мультиплексора 7 сигнал подают на вход АЦП 8, где его преобразуют в цифровой вид. Цифровой сигнал поступает на вход микропроцессора 9, включающего контроллер 12; таймер реального времени 13 и ОЗУ 14. Цифровым датчиком температуры 15 с частотой  регистрируют температуру контролируемого объекта 19. По фактическому значению температуры корректируют пороговый уровень сигнала с учетом температурной зависимости коэффициента преобразования первичного преобразователя, записанной в ЭПЭЗУ 16 в виде таблицы или математической формулы. Затем в контроллере 12 производят сравнение цифрового сигнала с пороговым уровнем, скорректированным с учетом влияния температуры. При этом, если сигнал меньше порогового уровня, то преобразование сигнала в цифровой вид производят при отключенном ОЗУ 14 с частотой 2•f2<f<fдискр, а при достижении и превышении указанного уровня увеличивают частоту аналого-цифрового преобразования до значения fдискр, включают ОЗУ 14 и сигнал записывают в него в течение времени
регистрируют температуру контролируемого объекта 19. По фактическому значению температуры корректируют пороговый уровень сигнала с учетом температурной зависимости коэффициента преобразования первичного преобразователя, записанной в ЭПЭЗУ 16 в виде таблицы или математической формулы. Затем в контроллере 12 производят сравнение цифрового сигнала с пороговым уровнем, скорректированным с учетом влияния температуры. При этом, если сигнал меньше порогового уровня, то преобразование сигнала в цифровой вид производят при отключенном ОЗУ 14 с частотой 2•f2<f<fдискр, а при достижении и превышении указанного уровня увеличивают частоту аналого-цифрового преобразования до значения fдискр, включают ОЗУ 14 и сигнал записывают в него в течение времени  Одновременно производят запись текущего времени по показаниям таймера реального времени 13. По окончании записи в ОЗУ 14 зарегистрированную информацию перезаписывают в ЭПЭЗУ 16, с которого данные о регистрируемой величине, времени появления нерегламентированных нагрузок и температуре в данный момент времени передают в систему окончательной обработки сигналов 20 при периодическом сборе информации посредством пульта сбора данных 21. При этом соединение регистратора 18 с пультом сбора данных 21 производят только на время передачи зарегистрированной информации, в остальное время регистратор 18 работает независимо от пульта сбора данных 21 и системы окончательной обработки сигналов 20. С целью исключения записи механических воздействий при монтаже регистратора на контролируемый объект 19 в электронном блоке 2 предусмотрен выключатель питания 17, который выключают на время хранения в нерабочем состоянии, монтажа, демонтажа и замены батареи питания.
Одновременно производят запись текущего времени по показаниям таймера реального времени 13. По окончании записи в ОЗУ 14 зарегистрированную информацию перезаписывают в ЭПЭЗУ 16, с которого данные о регистрируемой величине, времени появления нерегламентированных нагрузок и температуре в данный момент времени передают в систему окончательной обработки сигналов 20 при периодическом сборе информации посредством пульта сбора данных 21. При этом соединение регистратора 18 с пультом сбора данных 21 производят только на время передачи зарегистрированной информации, в остальное время регистратор 18 работает независимо от пульта сбора данных 21 и системы окончательной обработки сигналов 20. С целью исключения записи механических воздействий при монтаже регистратора на контролируемый объект 19 в электронном блоке 2 предусмотрен выключатель питания 17, который выключают на время хранения в нерабочем состоянии, монтажа, демонтажа и замены батареи питания.
При периодическом сборе информации (см. фиг.2) о нерегламентированных механических возмущениях контролируемого объекта 19 с помощью соответствующего интерфейса 22 соединяют регистратор 18 с пультом сбора данных 21, куда перезаписывают зарегистрированную информацию. С пульта сбора данных 21 считанная информация передается в компьютер системы окончательной обработки сигналов 20, который соединяется с пультом сбора данных 21 с помощью соответствующего интерфейса 23. В компьютере системы окончательной обработки сигналов 20 переданные данные обрабатываются специальной программой и выводятся на экран дисплея или принтер в виде осциллограмм ускорений по каждой из трех осей ортогональной системы координат для конкретного контролируемого объекта. Идентификация конкретного контролируемого объекта 19, типа регистратора 18 и его индивидуальных характеристик осуществляется по идентификационному коду, записанному в соответствующий регистр долговременной памяти контроллера 12 регистратора 18.
Регистратор (см. фиг.3 и 1) содержит первичный трехкомпонентный пьезоэлектрический преобразователь ускорения 1 и электронный блок 2, осуществляющий предварительную обработку и запоминание измеренных сигналов. Электронный блок 2 включает электрический соединитель 3, источник питания 4 в виде батареи питания 44, размещенной в стакане 25, усилитель 6 с входными цепями 5, включающими параллельно соединенные шунтирующий резистор 10 и подстроечную емкость 11, мультиплексор 7, АЦП 8, микропроцессор 9, датчик температуры 15 и ЭПЭЗУ 16. Усилитель и его входные цепи, мультиплексор, АЦП, микропроцессор, датчик температуры и ЭПЭЗУ (на фиг.3 не показаны) установлены на сборке печатных плат 24. Вход и выход ЭПЭЗУ 16 соединены с соответствующими выходом и входом контроллера 12, а другой выход контроллера 12 соединен с электрическим соединителем 3. При этом контроллер 12 соединен на сборке печатных плат 24 с выходным кабелем 42, который распаивается на электрический соединитель 3, установленный на верхней части корпуса 29 с возможностью подключения портативного пульта сбора данных 21. Пьезоэлектрический преобразователь ускорения 1 и электронный блок 2 объединены в один корпус 26, состоящий из нескольких частей (нижней части 27, внутренней крышки 28 и верхней части 29) для обеспечения последовательной сборки регистратора. Первичный трехкомпонентный пьезоэлектрический преобразователь ускорения 1 выполнен на основе чувствительных элементов 30 в виде биморфной мембраны с центральной цилиндрической опорой 33. Чувствительный элемент 30 выполнен из жестко соединенных между собой (склеенных) пьезоэлемента 31 в виде тонкого диска и подкрепляющей тонкой упругой мембраны 32. Чувствительные элементы 30 закреплены в трех взаимно перпендикулярных направлениях на опоре преобразователя 34 с помощью резьбовых хвостовиков чувствительного элемента 35. Первичный трехкомпонентный пьезоэлектрический преобразователь ускорения 1 жестко закреплен на основании нижней части корпуса 27 через изолятор преобразователя 36, обеспечивающий электрическую развязку опоры преобразователя 34 и корпуса 26. Электрический сигнал с пьезоэлементов 31 снимается посредством проводников чувствительного элемента 37, подпаянных к наружным обкладкам пьезоэлемента 31, и проводника опоры преобразователя 38, который электрически соединен с нижними обкладками пьезоэлемента 31 через опору преобразователя 34 и упругий элемент 33. Проводник 38 закреплен на опоре преобразователя 34 с помощью винта 39. Проводники чувствительного элемента 37 и проводник опоры преобразователя 38 закреплены во внутренней крышке корпуса 28 с помощью вклеенного бандажа 40. Одновременно клеевой слой 41 герметизирует внутреннюю полость нижней части корпуса 27. Проводники 37 и 38 соединены со входом предварительных усилителей - формирователей 6 (на фиг.3 не показаны), установленных на сборке печатных плат 24. Сборка печатных плат 24 и внутренняя полость верхней части корпуса 29 залита герметиком 41. Источник питания 4 выполнен отдельным блоком, размещенным внутри верхней части корпуса 29, в виде стакана 25, внутри которого размещена батарея питания 44. Батарея питания 44 подпружинена цилиндрической пружиной 49 и плоской пружиной 48, выполняющей роль электрода. Сверху стакан источника питания 25 закрывается колпачком 45. Электрическая энергия подается в электронный блок 2 с помощью проводников питания 47. Электрическая развязка положительного электрода батареи питания 44 обеспечивается нижним изолятором (на фиг.3 не показан). Для снижения влияния вибраций на показания регистратора батарея питания 44 устанавливается внутри стакана источника питания 25 через эластичную прокладку 46. Снаружи корпус 26 охвачен эластичной оболочкой 50, внутренняя часть которой выполнена в виде тонкостенного полого цилиндра 51, наружная часть - в виде регулярной шипообразной структуры, при этом шаг L, высота Н, диаметры нижнего D и верхнего d оснований шипов 52 выбраны из условия невозможности случайного касания цилиндра оболочки 51 предметами карманного пользования, причем Н > L > D≥d. Сверху электрический соединитель 3 закрывается металлической крышкой 53, предохраняющей от электрических наводок внутренние элементы электронного блока 2. Одновременно, крышка служит для предохранения соединителя 3 от внешних воздействий.
Электронный блок выполнен на известной элементной базе, широко используемой в аналогичных устройствах.
Регистратор механической величины работает следующим образом:
Под действием инерционных сил чувствительные элементы 30 трехкомпонентного пьезоэлектрического преобразователя 1 испытывают деформации изгиба и генерируют электрический заряд, пропорциональный действующему ускорению контролируемого объекта 19. Преобразователь 1 соединен с электронным блоком 2, где производится предварительная обработка данных: усиление сигнала, преобразование в цифровой вид, регистрация температуры контролируемого объекта 19 с помощью датчика температуры 15, температурная коррекция порогового уровня, сравнение цифрового сигнала с пороговым уровнем, фиксация времени появления нерегламентированных механических нагрузок и запись зарегистрированной информации. Одновременно электронный блок 2 обеспечивает перезапись зарегистрированной информации в систему окончательной обработки сигналов 20 и запись из нее исходной информации, необходимой для новых циклов работы регистратора.
Увеличение долговечности работы регистратора достигается отключением ОЗУ 14 и уменьшением частоты аналого-цифрового преобразования на время действия нормальных механических нагрузок, которые считаются механическим шумом и не записываются регистратором 18. Информативные сигналы регистрируются и записываются в ЭПЭЗУ 16 и перезаписываются в систему окончательной обработки сигналов 20 посредством пульта сбора данных 21.
Источники информации
1. Патент РФ 2123189 "Автономный запоминающий датчик для измерения пиковых значений ускорения", МПК 6 G 01 Р 15/04, опубл. в БИ 34 от 10.12.98, приоритет от 10.06.97.
2. Патент США 5526287 "Портативное устройство сбора данных", МПК 6 G 01 D 9/00, опубликовано в 1996 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ КОДОВЫЙ ЗАМОК | 2000 |
|
RU2179224C2 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА В ВОЛОКОННО-ОПТИЧЕСКИХ ЛИНИЯХ СВЯЗИ | 1995 |
|
RU2110894C1 |
| ЭЛЕКТРОННЫЙ КОДОВЫЙ ЗАМОК | 1999 |
|
RU2159315C1 |
| ГЕНЕРАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2103801C1 |
| СПОСОБ РЕГИСТРАЦИИ ДОСТИЖЕНИЯ ОБЪЕКТОМ ПОРОГОВОГО ЗНАЧЕНИЯ ТЕМПЕРАТУРЫ | 1997 |
|
RU2150681C1 |
| РЕГУЛЯТОР КОНЦЕНТРАЦИИ ОЗОНА | 2000 |
|
RU2189070C2 |
| СПОСОБ РЕГИСТРАЦИИ ДАВЛЕНИЯ И ПЕРЕМЕЩЕНИЯ УДАРНОЙ ВОЛНЫ | 1996 |
|
RU2168158C2 |
| ПРЕОБРАЗОВАТЕЛЬ БИНАРНОГО КОДА В ФАЗОМАНИПУЛИРОВАННЫЙ КОД | 1999 |
|
RU2159988C1 |
| ЭЛЕКТРОННЫЙ КОДОВЫЙ ЗАМОК | 1999 |
|
RU2156851C1 |
| ВЗРЫВНОЙ ПЬЕЗОГЕНЕРАТОР | 1997 |
|
RU2154887C2 |
Изобретение относится к неразрушающему контролю объектов. Согласно способу измеряют величину в частотном диапазоне от f1 до f2посредством первичного преобразователя, сигнал с которого преобразуют в цифровой вид с частотой дискретизации fдискр и подают в оперативное запоминающее устройство. При этом цифровой сигнал сравнивают с пороговым уровнем, в случае недостижения которого аналого-цифровое преобразование сигнала производят при отключенном запоминающем устройстве с частотой 2f2<f<f дискр, а при достижении и превышении указанного уровня сигнал записывают в запоминающее устройство в течение времени Tзап≥1/f1 и перезаписывают с него в энергонезависимое запоминающее устройство. Регистратор содержит первичный преобразователь величины и электронный блок предварительной обработки сигнала. Первичный преобразователь и электронный блок объединены в один корпус. В электронный блок дополнительно введено электрически программируемое энергонезависимое запоминающее устройство. Технический результат проявляется в повышении долговечности работы без замены батареи питания, а также в снижении влияния температуры на показания и исключении несанкционированного срабатывания. 2 с. и 4 з.п. ф-лы, 3 ил.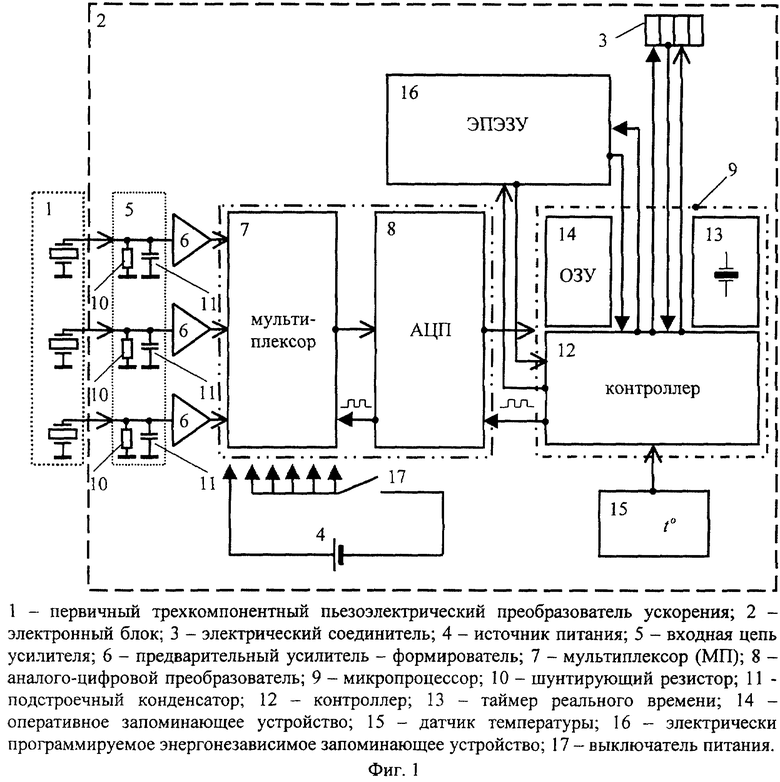
| US 5526287 А, 11.06.1996 | |||
| АВТОНОМНЫЙ ЗАПОМИНАЮЩИЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПИКОВЫХ ЗНАЧЕНИЙ УСКОРЕНИЯ | 1997 |
|
RU2123189C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 1997 |
|
RU2125238C1 |
| RU 2060479 C1, 20.05.1996. | |||
