Данное предложение относится к области разделения твердых материалов с помощью жидкостей и может быть использовано при технологических исследованиях и переработке минерального сырья.
Известно устройство для гравитационного инерционно-динамического обогащения, включающее станину, механизм загрузки исходного материала и жидкости, наклонную рабочую поверхность с верхней загрузочной частью и нижней разгрузочной частью, высокие препятствия, расположенные по краям рабочей поверхности, с отверстиями в них для вывода фракций исходного материала, механизм для осуществления возвратно-поступательного движения, пружинную тягу, соединяющую рабочую поверхность с этим механизмом (Аполицкий В. Н., патент РФ 2085295, 1995).
Наиболее близким по техническому решению и сущности к данному предложению является устройство для гравитационного инерционно-динамического обогащения, включающее станину, механизм загрузки исходного материала и жидкости, наклонную рабочую поверхность с верхней загрузочной частью и нижней разгрузочной частью, высокие препятствия, расположенные по краям рабочей поверхности, с отверстиями в них для вывода фракций исходного материала, механизм для осуществления возвратно-поступательного движения, пружинную тягу, соединяющую рабочую поверхность с этим механизмом (Аполицкий В.Н., патент РФ 2092244, 1995).
Недостатками технических решений (аналога и прототипа) является невысокая производительность и сложность устройств.
Цель предложения - повышение производительности установки, упрощение конструкции.
Поставленная цель достигается за счет того, что устройство для инерционно-динамического обогащения, включающее станину, механизм загрузки исходного материала и жидкости, наклонную рабочую поверхность, препятствия, расположенные по краям рабочей поверхности, с отверстиями в них для вывода фракций исходного материала, механизм возвратно-поступательного движения, снабжено металлическим каркасом, с одной стороны которого выполнено ограничительное отверстие и закреплена пружинная тяга продольного движения, а с другой стороны расположена пружинная тяга поперечного движения, связанная с приводом механизма возвратно-поступательного движения, и ползунок с направляющей, закрепленной под углом к поперечному направлению рабочей поверхности и имеющей подтягивающую пружину, при этом на станине у нижней разгрузочной части рабочей поверхности закреплены ограничительные преграды поперечного возвратно-поступательного движения, а у верхней части рабочей поверхности расположена в ограничительном отверстии ограничительная преграда, соединенная с пружинной тягой продольного движения, при этом рабочая поверхность жестко установлена на металлическом каркасе.
Препятствия, расположенные по краям рабочей поверхности, установлены с образованием сужающихся желобов.
Сущность предлагаемого устройства заключается в следующем.
Устройство для гравитационного инерционно-динамического обогащения состоит из подвижной наклонной рабочей поверхности с высокими препятствиями и отверстиями в них для вывода фракций (например, наклонный сужающийся желоб, подвешенный на тросах в пространстве и имеющий поперечную перегородку в его нижнем узком конце), механизма подачи пульпы в верхнюю загрузочную часть рабочей поверхности, механизм поперечного возвратно-поступательного движения с пружинной тягой, соединенной с нижней частью рабочей поверхности, а также ограничителя (например, отверстия) и ограничительной преграды (например, штыря, который находится в отверстии), которые позволяют ограничить движение верхней загрузочной части рабочей поверхности, и ограничителя - преград, с помощью которых ограничивается поперечное возвратно-поступательное движение нижней разгрузочной части рабочей поверхности. С целью создания продольного инерционного движения тяжелой фракции относительно рабочей поверхности вниз имеется пружинная тяга, притягивающая верхний край ограничительного отверстия к ограничительной преграде-штырю, и направляющая ограниченной длины, расположенная под углом к поперечному направления рабочей поверхности, с ползунком, который, взаимодействуя с направляющей ограниченной длины во время поперечного возвратно-поступательного движения рабочей поверхности, приводит к перемещению в пространстве рабочей поверхности в продольном направлении в сторону верхней ее разгрузочной части до прекращения этого взаимодействия.
При включении механизма поперечного возвратно-поступательного движения его привод через пружинную тягу осуществляет поперечное возвратно-поступательное движение нижней части рабочей поверхности, которое прерывается при ударах об ограничительные преграды, одновременно за счет взаимодействия ползунка с направляющей происходит смещение рабочей поверхности в продольном направлении в сторону верхней загрузочной части, при этом верхний край ограничительного отверстия удаляется от ограничительного штыря, растягивается пружинная тяга продольного движения рабочей поверхности. Далее взаимодействие ползунка за счет ограниченной длины направляющей прекращается, рабочая поверхность натянутой пружинной тягой перемещается в продольном направлении вниз в сторону разгрузочной части до тех пор, пока ограничитель продольного движения не ударится об ограничительную преграду-штырь. Движение рабочей поверхности вниз резко прекращается. Таким образом, создается движение рабочей поверхности с прерыванием его как в поперечном, так и продольном направлениях, как это необходимо для осуществления гравитационного инерционно-динамического способа обогащения.
С целью увеличения производительности установки в нижней разгрузочной части форма рабочей поверхности с высокими препятствиями по ее краям образует несколько желобов, при этом число отверстий для вывода фракций исходного материала увеличивается. Это позволяет ускорить разгрузку легкой и тяжелой фракций, повысить производительность установки.
Пример реализации предлагаемого устройства.
Изготавливают плоскую рабочую поверхность 1 (см. чертеж) с высокими препятствиями (стенками) 2, расположенными по ее краям (нержавеющая сталь), которые образуют два разгрузочных сужающихся желоба 3 и 4, перекрытых препятствиями (перегородками 5 и 6). Длина рабочей поверхности 1 равна 700 мм, а ширина широкой верхней загрузочной части рабочей поверхности - 500 мм, нижних узких разгрузочных концов сужающихся желобов 3 и 4 (препятствий-перегородок 5 и 6) - 40 мм. Вблизи перегородок 5 и 6 в верхних частях боковых стенок желобов 3 и 4 делают регулируемые отверстия 7 для вывода легкой фракции, а в нижней части перегородок 5 и 6 у рабочей поверхности 1 делают регулируемые отверстия с шибером 8 для вывода тяжелой фракции. Рабочую поверхность 1 жестко устанавливают в металлический каркас 9, у которого имеется ограничительное отверстие 10 и закрепленная вблизи него пружинная тяга 11 продольного движения. С другой стороны каркаса 9 расположена пружинная тяга 12 и ползунок (ролик) 13. Каркас 9 с рабочей поверхностью 1 подвешивают в пространстве под углом к горизонту в 7o с помощью тросов, закрепленных к станине (не показано) так, чтобы широкая загрузочная часть рабочей поверхности 1 была выше разгрузочной части. На станине закрепляют ограничительные преграды 14 поперечного возвратно-поступательного движения у нижней разгрузочной части рабочей поверхности, а также ограничительную преграду (штырь) 15, которая должна находиться в ограничительном отверстии 10, а второй конец пружинной тяги 11 подсоединяют к штырю 15 так, чтобы верхний край отверстия 10 был притянут пружинной тягой 11 к штырю 15. Кроме этого, на станине у ползунка 13 закрепляют направляющую 16 (с подтягивающей пружиной 17), длина направляющей 16-50 мм, и она закреплена под углом к поперечному направлению рабочей поверхности 1, а вблизи пружинной тяги 12 поперечного движения размещают механизм поперечного возвратно-поступательного движения (частота 100 кол/мин, амплитуда 100 мм), (не показан) с приводом 18, который прикрепляют к второму концу пружинной тяги 12 поперечного движения. Вблизи верхней загрузочной части рабочей поверхности 1 располагается механизм загрузки исходного материала с жидкостью (не показан).
Для осуществления гравитационного инерционно-динамического обогащения алюмосиликатной руды включают механизм поперечного возвратно-поступательного движения и подают исходный материал, смешанный с водой. Во время поперечного возвратно-поступательного движения привода 18 каркас 9, рабочая поверхность 1 и ползунок 13 совершают поперечные возвратно-поступательные движения, при этом ползунок 13 периодически взаимодействует с направляющей 16, в течение времени упирания ползунка 13 в направляющую 16 перемещает каркас 9, а вместе с ним и рабочую поверхность 1 в продольном направлении. Дойдя до конца направляющей 16, ползунок 13 выходит из соприкосновения с направляющей 16, при этом пружинная тяга 11 оказывается натянутой. Пружинная тяга 11 при выходе из взаимодействия ползунка 13 с направляющей 16 ускоренно перемещает рабочую поверхность 1 в продольном направлении в сторону нижнего края разгрузочной части рабочей поверхности до тех пор, пока верхний край ограничительного отверстия 10 не ударится об ограничительную преграду - штырь 15. При такой остановке движения рабочей поверхности 1 находящаяся на этой поверхности тяжелая фракция по инерции будет периодически продолжать свое движение вниз. Рабочая поверхность 1 после выхода из зацепления ползунка 13 с направляющей 16 будет продолжать свое движение и в поперечном направлении до тех пор, пока нижний боковой край каркаса 8 не ударится о преграду 14 поперечного возвратно-поступательного движения, при этом рабочая поверхность резко прекращает свое движение в поперечном направлении. Привод 18 натягивает пружинную тягу 12, а за тем при возвратном движении привода 18 пружинная тяга 12 сжимается, а затем растягивается и возобновляет движение рабочей поверхности 1, но уже в другую сторону. При этом движении ползунок 13 свободно проходит с обратной стороны направляющей 16, имеющей пружину 17, которая позволяет отсторонить направляющую 16 ползунком 13 (это кратковременное воздействие их не приводит к перемещению рабочей поверхности). Поперечное движение рабочей поверхности 1 продолжается до тех пор, пока не встретится на ее пути другая преграда 14, при этом движение поверхности 1 резко прекращается. Далее процесс движения и его прекращение периодически повторяются, согласуясь с возвратно-поступательным движением привода 18.
Таким образом, выполняются основные условия для осуществления гравиционного инерционно-динамического обогащения - происходит поперечное и продольное возвратно-поступательное движение рабочей поверхности 1 с резкими отрицательными ускорениями в моменты удара о преграды 14 и 15. Пульпа, сбегая вниз по рабочей поверхности под действием гравитационных и динамических сил, вначале расслаивается по высоте в верхней части, а затем и в нижней части рабочей поверхности под действием сегрегации, которой способствует инерционное движение частиц в моменты резкого движения рабочей поверхности при ударах о преграды. Легкая фракция исходного материала выводится через отверстия 7 боковых стенок нижних частей сужающихся желобов 3 и 4, а тяжелая - через отверстия 8, расположенные в нижней части перегородок 5 и 6.
В результате проведенного обогащения алюмосиликатной руды в легкой фракции оказались минералы, имеющие удельный вес менее 3 г/см (кварц, полевой шпат и др. алюмосиликатные минералы), а в тяжелой - касситерит, вольфрамит, галенит, а также частицы самородных металлов.
Наличие нескольких сужающих желобов 3 и 4 в предлагаемом устройстве позволит увеличить количество загружаемого исходного материала и таким образом повысить производительность установки.
Таким образом, предлагаемое устройство упрощает конструкцию устройства для осуществления гравитационного инерционно-динамического обогащения, одновременно позволяет снизить энергозатраты за счет использования одного механизма возвратно-поступательного движения, а также повысить производительность за счет особой формы рабочей поверхности (нескольких желобов) и большого числа отверстий для вывода фракций по сравнению с прототипом.
Использование: разделение твердых материалов с помощью жидкости при технологической переработке минерального сырья и его исследовании. Технический результат - повышение производительности установки, упрощение конструкции. Устройство включает станину, механизм загрузки исходного материала и жидкости, наклонную рабочую поверхность, препятствия, расположенные по краям рабочей поверхности, с отверстиями в них для вывода фракций исходного материала, механизм возвратно-поступательного движения. Оно снабжено металлическим каркасом, с одной стороны которого выполнено ограничительное отверстие и закреплена пружинная тяга продольного движения, а с другой стороны расположена пружинная тяга поперечного движения, связанная с приводом механизма возвратно-поступательного движения, и ползунок с направляющей, закрепленной под углом к поперечному направлению рабочей поверхности и имеющей подтягивающую пружину. На станине у нижней разгрузочной части рабочей поверхности закреплены ограничительные преграды поперечного возвратно-поступательного движения, а у верхней части рабочей поверхности расположена в ограничительном отверстии ограничительная преграда, соединенная с пружинной тягой продольного движения, при этом рабочая поверхность жестко установлена на металлическом каркасе. Препятствия, расположенные по краям рабочей поверхности, установлены с образованием сужающихся желобов. 1 з.п. ф-лы, 1 ил.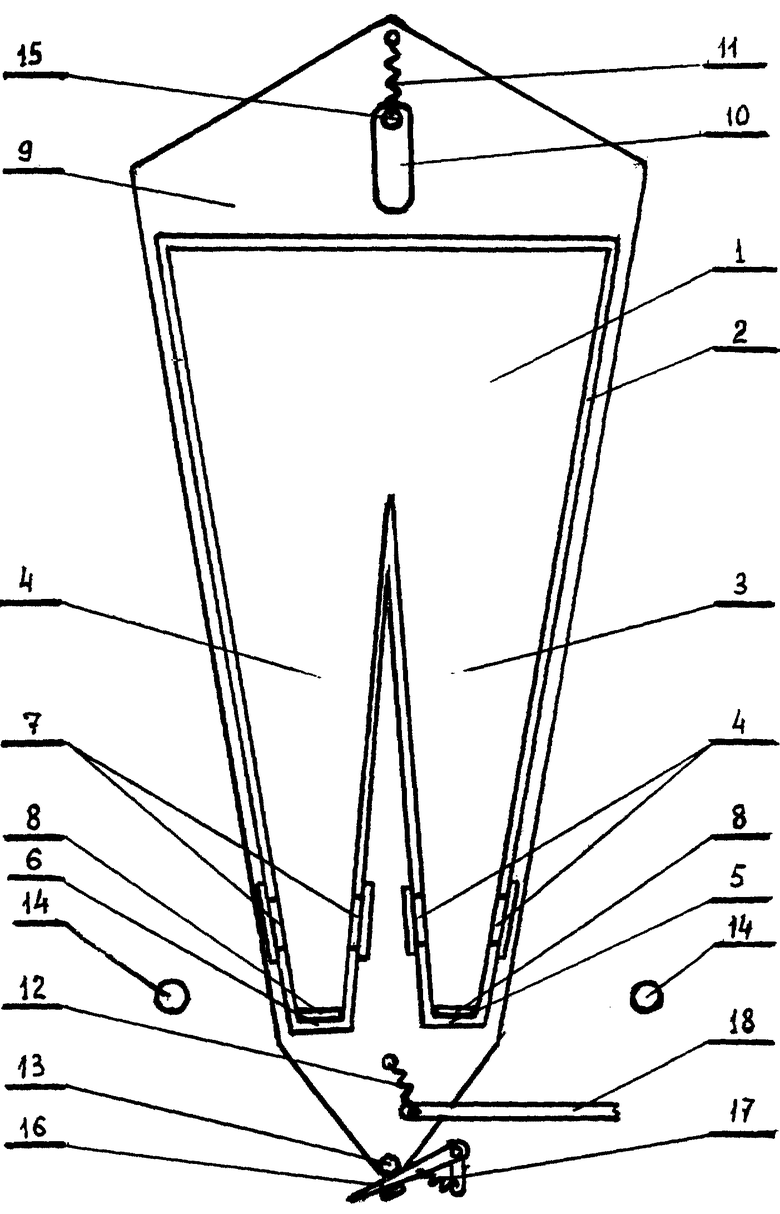
| СПОСОБ ГРАВИТАЦИОННОГО РАЗДЕЛЕНИЯ ЧАСТИЦ ПОРОШКОВОГО МАТЕРИАЛА | 1995 |
|
RU2092244C1 |
| Концентрационный стол для флотогравитации | 1989 |
|
SU1671351A1 |
| СПОСОБ ГРАВИТАЦИОННОГО ОБОГАЩЕНИЯ РУД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1984 |
|
SU1438062A1 |
| SU 1200980 А1, 30.12.1995 | |||
| Вибрационный наклонный струйный концентратор | 1991 |
|
SU1836984A1 |
| СПОСОБ КЛАССИФИКАЦИИ ЧАСТИЦ ПОРОШКОВОГО МАТЕРИАЛА | 1995 |
|
RU2085295C1 |
| СПОСОБ ГРАВИТАЦИОННОГО ОБОГАЩЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЖЕЛОБА | 1995 |
|
RU2148436C1 |
| БОГДАНОВ О.С | |||
| Справочник по обогащению руд | |||
| - М.: Недра, т.2, 1974, с.97 | |||
