Изобретение относится к конструкциям тензометрических датчиков силы и может быть использовано в испытательной и силоизмерительной технике.
Из уровня техники известен тензорезисторный датчик силы типа C1D фирмы НВМ (Германия), имеющий два тензомоста для измерения только осевой составляющей вектора силы, а для снижения влияния поперечных нагрузок на величину измеряемого параметра применен мембранный узел, однако, даже наличие последнего только снижает, а не исключает погрешность измерения осевой компоненты вектора силы от поперечных составляющих. В качестве аналога следует отметить известную схему многокомпонентного тензорезисторного датчика вектора силы, который содержит корпус, балочный упругий элемент с размещенными на нем тензорезисторами, соединенными в мостовые цепи, предназначенные для измерения осевой и поперечной составляющей вектора силы (Э. Бауманн. Измерение сил электрическими методами. - Мир, с.344). Основным недостатком данного датчика является малый предел измерения - до 0,1-0,15 МН. В качестве аналогов следует упомянуть датчики, измеряющие только осевую компоненту вектора силы и в качестве упругого элемента имеющие балки на двух опорах (авт. св. 1654658, БИ 21, 1991 г.), дугообразный упругий элемент-пружину (авт. св. 620947, БИ 31, 1978 г. ). Общими недостатками этих датчиков является измерение только одной компоненты вектора силы и малый предел измерения.
В качестве прототипа взята конструкция тензорезисторного датчика вектора силы (Э. Бауманн. Измерение сил электрическими методами. - Мир, с. 344). Датчик содержит корпус, цилиндрический упругий элемент с размещенными на нем тензорезисторными мостами для измерения осевой и поперечных составляющих вектора силы, а также силоопорную и силовоспринимающую части. Недостатками данного датчика является низкая достоверность и надежность измерения осевой и поперечной составляющих вектора силы, что обусловлено применением одного тензорезисторного моста для измерения указанных составляющих вектора силы. Кроме того, схема расположения тензомостов измерения поперечных составляющих вектора силы не позволяет определить координаты точки приложения последнего, т. е. наличия эксцентриситета в приложении нагрузки на датчик. Это не дает возможности корректировки результатов измерения.
Задачей заявляемого изобретения является разработка датчика, обеспечивающего высокоточное и надежное измерение вектора силы и определение точки ее приложения (эксцентриситета) относительно оси датчика.
Поставленная задача решается тем, что в предлагаемом тензорезисторном датчике вектора силы, содержащем корпус, цилиндрический упругий элемент с размещенными на нем тензорезисторными мостами для измерения осевой и поперечных составляющих вектора силы, а также силоопорную и силовоспринимающую части, при этом силоопорная часть выполнена диаметром (1,2-1,3)d и высотой (0,3-0,4)d, где d - диаметр упругого элемента. Высота упругого элемента от силоопорной до силовоспринимающей поверхности составляет (2,5-2,7)d, два тензорезисторных моста измерения осевой составляющей вектора силы размещены в поперечном сечении упругого элемента, находящемся на расстоянии (1,85-1,90)d от силоопорной поверхности, со смещением относительно друг друга на 90o, два тензорезисторных моста измерения поперечной составляющей вектора размещены в этом же сечении также со смещением на угол 90o относительно друг друга.
Кроме того, с целью повышения точности измерения осевой составляющей вектора силы и определения точки его приложения, тензорезиторный датчик вектора силы снабжен двумя дополнительными тензорезисторными мостами измерения поперечной составляющей вектора силы, размещенными в дополнительном сечении на расстоянии (0,8-0,9)d от мостов первого сечения в направлении силоопорной поверхности и имеющие топологию наклейки аналогичных тензомостов в первом сечении.
Выполнение тензорезисторного датчика силы с цилиндрическим упругим элементом с указанным соотношением размеров позволяет повысить помехоустойчивость поперечного сечения, в котором размещены тензорезисторы измерения осевой составляющей вектора силы к влиянию неинформативного изгибающего момента от действия поперечных составляющих вектора силы и его внецентрового приложения.
Сравнение заявляемого технического решения с прототипом показывает, что оно отличается от последнего иным расположением тензорезисторных мостов друг относительно друга, что повышает точность измерения, их конкретным местом расположения от силоопорной поверхности, постановкой в зависимость габаритов силоопорной части и высоты упругого элемента относительно его диаметра, при этом введение тензорезисторных мостов, измеряющих поперечные составляющие вектора силы и расположенных в дополнительном сечении строго под аналогичными мостами в первом сечении, позволяет определить эксцентриситет точки приложения вектора силы относительно оси датчика, т.е. данное решение соответствует критерию "новизна".
Необходимость применения двух тензомостов, повернутых друг относительно друга на 90o, обусловлена влиянием на показания осевых тензомостов изгибающих компонент вектора силы, действующих под любым азимутным углом, к плоскостям расположения тензорезисторов. Применение тензомостов, измеряющих поперечные составляющие вектора силы и расположенных в дополнительном сечении упругого элемента, позволяет определить эксцентриситет точки приложения силы.
Это позволило составить полную систему уравнений для расчета вектора силы. Координата высоты размещения тензорезисторных мостов измерения осевой составляющей вектора силы выбрана из условия минимального влияния неинформативных поперечных силовых помех на формирование сигналов тензорезисторов.
Таким образом, предлагаемая конструкция датчика с заявляемой в нем совокупностью признаков позволяет достичь технический результат - обеспечить высокоточное и надежное измерение вектора силы и определение точки ее приложения (эксцентриситета) относительно оси датчика. Такое выполнение конструкции из уровня техники явным образом не вытекает и не было очевидным для специалистов, а имеющиеся отличия непосредственно влияют на решение поставленной задачи. Это дает основание считать данное техническое решение обладающим изобретательским уровнем.
Сущность предлагаемого изобретения поясняется графическим материалом (см. чертеж), на котором приняты следующие обозначения:
1 - силовоспринимающая часть упругого элемента;
2 - цилиндрический упругий элемент;
3 - первое поперечное сечение;
4 - тензомосты осевых составляющих вектора силы;
5 - тензомосты поперечных составляющих вектора силы;
6 - дополнительное сечение упругого элемента;
7 - тензомосты поперечных составляющих вектора силы в дополнительном сечении;
8 - силоопорная часть упругого элемента;
d - диаметр упругого элемента:
α - угол, под которым сила воздействует на чувствительный элемент датчика;
а - эксцентриситет (расстояние от оси датчика до точки приложения вектора силы).
Предложенная конструкция датчика силы работает следующим образом. При воздействии на датчик вектора силы под углом α упругий элемент 2 испытывает как сжимающее, так и изгибающее воздействие данного вектора. Сжатие чувствительного элемента по оси воспринимается тензорезисторными мостами 4, расположенными в сечении 3 на расстоянии (1,85-1,90)d от силоопорной части датчика. Тензомосты 4 дублируют друг друга, что повышает достоверность и надежность измерения осевой составляющей вектора силы. Под воздействием поперечной составляющей вектора силы, появляются изгибающие моменты, величина которых измеряется тензорезисторами мостов 5 и 7, расположенными в основном 3 и дополнительном 6 сечениях соответственно, по показаниям которых определяют эксцентриситет точки приложения вектора силы к упругому элементу 2 датчика.
Из анализа результатов испытаний экспериментальных образцов заявляемого датчика установлено:
- нелинейность и гистерезис выходного сигнала датчика при измерении осевой нагрузки не превышает 0,07-0,1%;
- величина среднеквадратичного отклонения случайной составляющей погрешности каналов измерения осевой составляющей вектора силы не превышает 0,12%;
- нелинейность и гистерезис выходного сигнала канала измерения поперечных составляющих вектора силы датчиков находятся в пределах: 0,07-0,54% и 0,09-0,68% соответственно для основных (первое поперечное сечение) и дополнительных (второе сечение) тензомостов.
Таким образом, категория точности экспериментальных образцов датчика вектора силы составляет:
- по каналам измерения осевой составляющей вектора силы - 0,15;
- по каналам измерения поперечных составляющих вектора силы - 1,0.
Изготовление датчиков не вызовет затруднений, так как его составные элементы выпускаются отечественной промышленностью. Упругий элемент может быть изготовлен из стали типа 30ХГСА, 40Х13 или аналогичной им. Необходимость же в использовании датчика, обеспечивающего достоверное и надежное измерение вектора силы, особенно для испытательной техники, не вызывает сомнений, а значит предложение обладает промышленной применимостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК СДВИГОВЫХ НАПРЯЖЕНИЙ | 2003 |
|
RU2252400C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК ДАВЛЕНИЯ | 1997 |
|
RU2174220C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 2009 |
|
RU2396527C1 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ НАГРУЗКИ, ДЕЙСТВУЮЩЕЙ НА БУРОВОЕ ДОЛОТО | 2014 |
|
RU2566646C2 |
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794739A1 |
| ФЕЙЕРВЕРОЧНАЯ РАКЕТА | 2001 |
|
RU2203472C2 |
| УПРУГИЙ ЭЛЕМЕНТ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА СИЛЫ | 2013 |
|
RU2526228C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ УСИЛИЙ | 2009 |
|
RU2404415C1 |
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794740A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 1997 |
|
RU2114406C1 |
Изобретение относится к тензометрическим датчикам силы и может быть использовано в испытательной и силоизмерительной технике. Датчик содержит корпус, помещенный в него цилиндрический упругий элемент 2 с размещенными на нем тензорезисторными мостами 4, 5 для измерения осевой и поперечных составляющих вектора силы. Упругий элемент 2 содержит силоопорную 8 и силовоспринимающую 1 части. Силоопорная часть 8 выполнена диаметром (1,2-1,3)d и высотой (0,3-0,4)d, где d - диаметр упругого элемента. Высота упругого элемента 2 от силоопорной до силовоспринимающей поверхности составляет (2,5-2,7)d. Два тензорезисторных моста 4 измерения осевой составляющей вектора силы размещены в поперечном сечении упругого элемента 2, находящемся на расстоянии (1,85-1,90)d от силоопорной поверхности, со смещением относительно друг друга на 90o. Два тензорезисторных моста 5 измерения поперечной составляющей вектора размещены в этом же сечении также со смещением на угол 90o относительно друг друга. Технический результат - повышение точности измерений и надежности работы датчика. 1 з.п. ф-лы, 1 ил.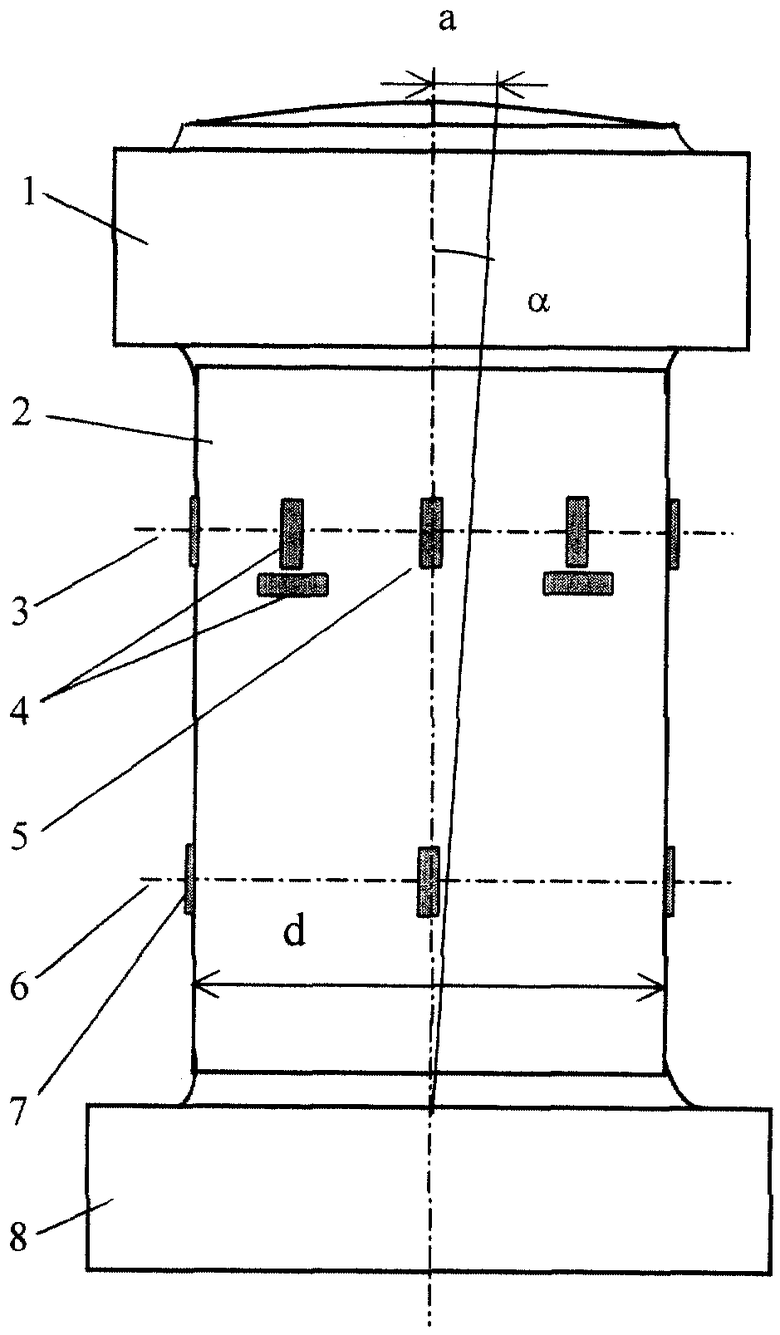
| Динамометр к протяжным станкам | 1976 |
|
SU620846A1 |
| Динамометр к протяжным станкам | 1978 |
|
SU718733A2 |
| Устройство для измерения механических нагрузок | 1974 |
|
SU493663A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА ГРЕБНОГО ВИНТА СУДНА | 1996 |
|
RU2115900C1 |

