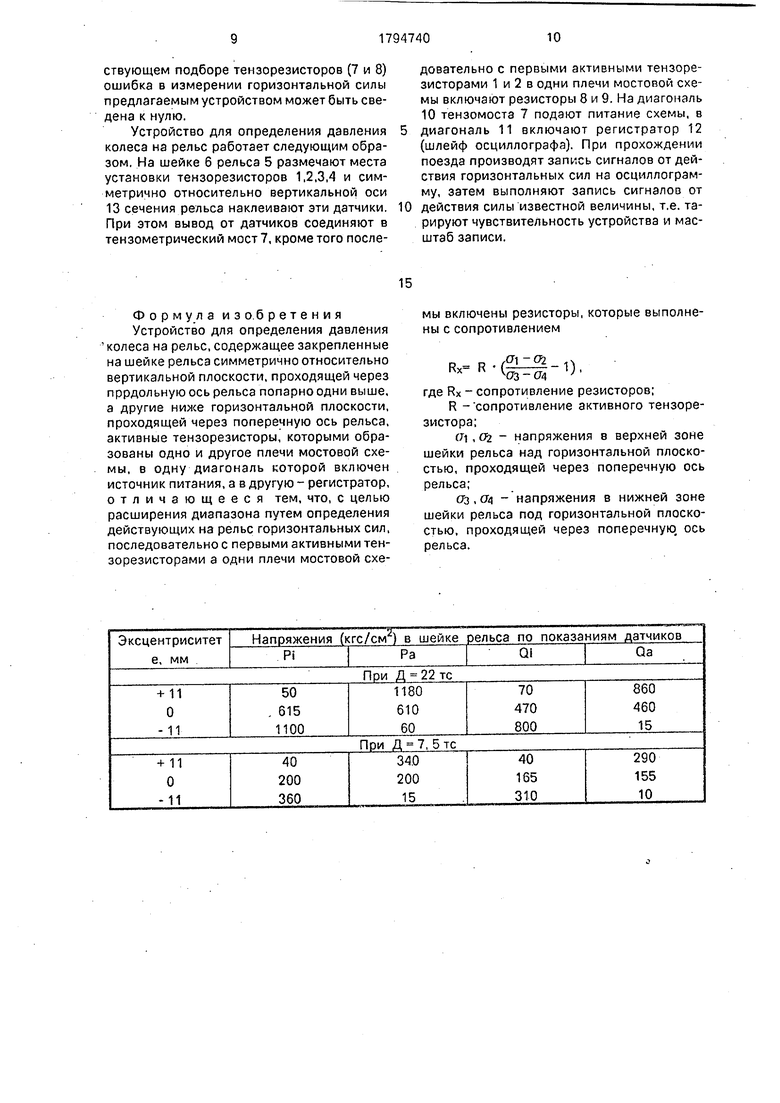
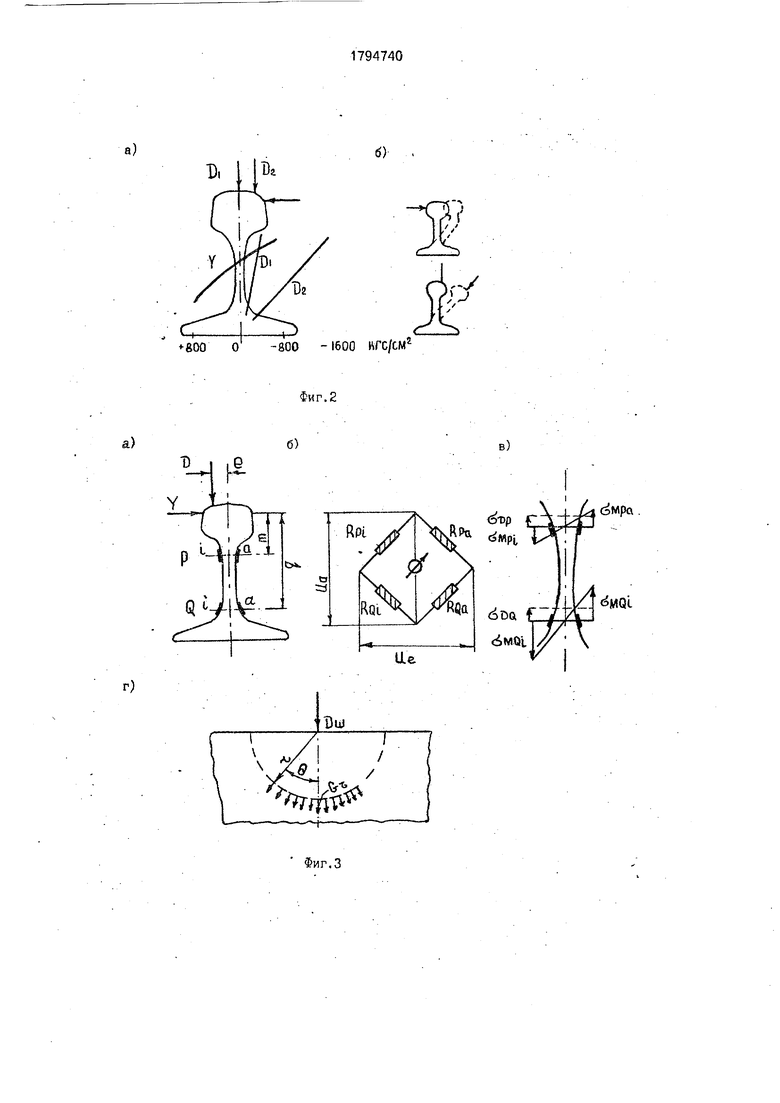
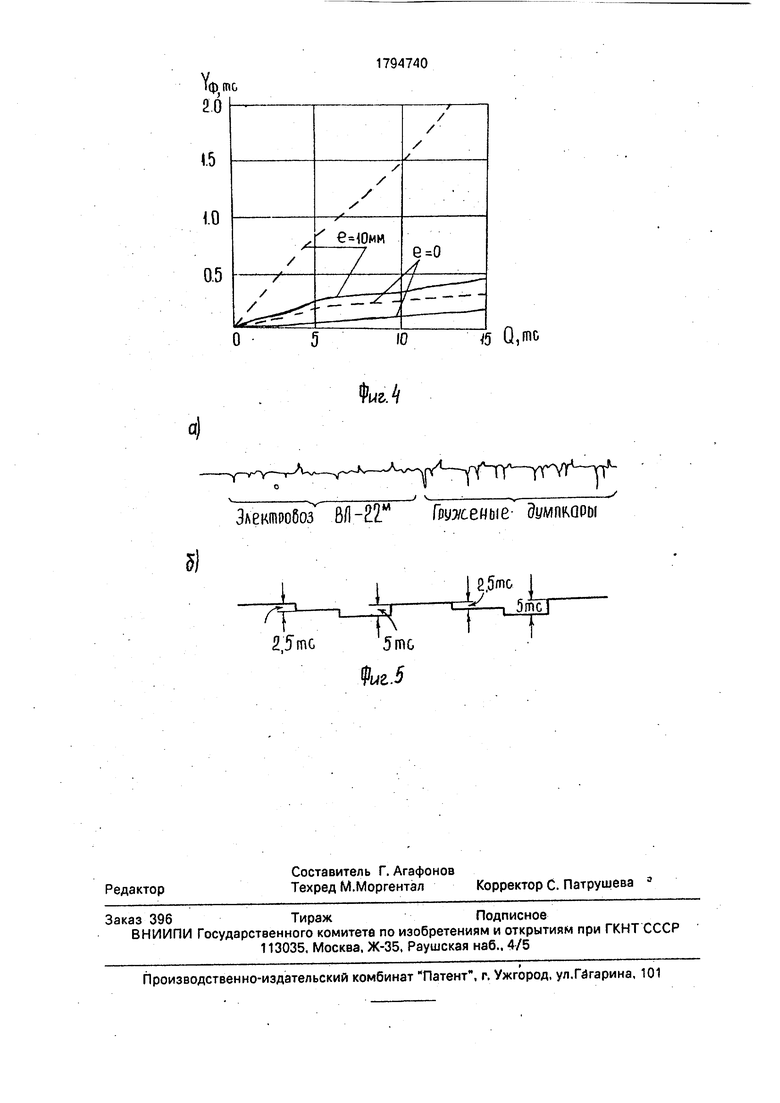
(а), характер деформации (6) ;.на фиг.З - схема Шлумпфа для измерения горизон- тальных сил, действующих в отдельном сечении рельса и распределение напряжения сжатия в шейке рельса от вертикальной на- грузки; на фиг.4 - график зависимости фик- тивной горизонтальной силы от действующей вертикальной нагрузки при измерения/ предлагаемым устройством (сплошные линии) и с помощью устройст- ва - прототипа (штриховые); на фиг.5 - копия . осциллограммы записи сил, предлагаемым устройством.
Предлагаемое устройство (фиг.1) для измерения горизонтальных сил, действующих на рельс, содержит рабочие тензорезисто- ры 1,2,3,4, наклеенные на шейке б рельса 5 и расположенные по разные стороны относительно оси симметрии 13 и центра тяжести рельса. Тензорезисторы 8. 9 смонтированы в тензометрический мост 7. Измерительный мост 7 подключен к источнику питания. Для записи сигнала от воздействия горизонтальной нагрузки 14 в измерительную схему тензомоста 7 предус- мотрено напряжение питания а диагональ 10Х а в другую диагональ 11 включен шлейф 12. Для достоверности достигаемого положительного эффекта при измерении горизонтальных поперечных сил, действующих на рельс, с помощью предлагаемого уст- ройства авторами были проанализированы теоретические допущения и экспериментальные данные измерений динамических сил взаимодействия колеса и рельса.
Измерение горизонтальных сил, действующих на железнодорожный рельс от колес подвижного состава, выполняют например, методом Шлумпфа с помощью тензодатчиков, наклеиваемых вертикально на шейку, рельса и включаемых по электрической схеме моста Уинстона (фиг.З). При этом принято допущение, что на результаты измерения горизонтальных сил с помощью указанного устройства не влияют величина и место приложения вертикальной нагрузки. В действительности это не так.
Относительное изменение омического сопротивления проволоки dR датчика про- порционально относительному ее удлинению Ј
dR/R gdl/l g e,(2) где R - омическое сопротивление датчика;
I и dl - соответственно длина и удлинение проволоки;
g - коэффициент тензочувствительно- сти;
Е - относительное удлинение проволо ки.
Сигнал на клеммах измерительного прибора при включении всех четырех датчиков в мост (фиг.З) определяются следующим выражением
Y (eQa-eQ.)-(epa-epi), (3)
где с - коэффициент пропорциональности. Этот сигнал равен величине внешней горизонтальной силы и не зависит от влияния вертикальной силы. Выражение для изгибающих моментов в сечениях Р и G будут равны (фиг.З)
мр Y m - D е(4) MG Y-q-D-e (5) Отсюда при вычитании моментов получено выражение для горизонтальной силы V - Мз Ыр ,-, Ґ- сГПт7-- Ю Аналогичное выражение для горизонтальной силы получено при постановке в формулу (3) выражений для относительных деформаций датчиков, записанных в виде
„ 1 f® J.MQV
4xJ Wo 1
Fo -If-DL + MPv epa-ElFp .
lf-D- E Fo
(7):
(8);
(9); 00).
... - ( - - MQy ЈQI WQJ
г - 1 (D 4-M
ЈР|-Ё%+Щ). где Е - модуль упругости;
Fp и FQ - площади сечений Р и Q на единице длины;
Wp и WQ - моменты сопротивления тех же сечений.
При подстановке в (3) выражений (7-10) после преобразований выражения для силы будут иметь вид
Y-ЈS
I - тт-rr
,Ма МЛ/Q
Мр
л
(11)
Z t МЛ/Q Wp Р
Из формулы (11) следует, что электрический сигнал на зажимах измерительного прибора не зависит от вертикальных нагрузок и эквивалентен величине горизонтальной силы. По Шлумпфу напряжения, а следовательно, и деформации в шейке рельса при указанном на фиг.За силовом воздействии распределяются, как показано на фиг.Зв. Суммарные напряжения складываются из напряжений сжатия от вертикальной силы и напряжений от изгибающего момента. При этом из формул (7-10) видно, что распределение напряжений сжатия в шейке по всей высоте принято равномерным. Первые члены в скрбках выражений (7,8,9,10) ео всех четырех формулах величин относительных деформаций равны между
собой при равенстве площадок сечений, т.е. , что задается по условию. В действительности имеет место другая картина распределения напряжений сжатия в шейке (фиг.З). Напряжения в шейке рельса от действия вертикальной нагрузки, приложенной по оси симметрии, уменьшаются по мере удаления от места приложения силы. Величины этих напряжений могут быть определены по формуле
2 Рщ cos в. .
От--яьТ - -{12)
где 0- угол между вертикалью и направлением, по которому измерено давление;
Dui равнодействующая давления, передаваемого от головки рельса на шейку;
о --толщина шейки;
г- расстояние от действующей силы до места, измерения напряжений.
Вертикальная сила, приложения с эксцентриситетом, одновременно со сжатием вызывает также вертикальный изгиб шейки и кручение. Эпюры распределения поперечных нормальных напряжений в шейке рельса при действии центральной и эксцентрично приложенной вертикальной нагрузки, а также боковой силы представлены на фиг.2. Кривая изменения напряжения в среднем участке шейки рельса в зависимости от эксцентриситета приложения верти-: кальной нагрузки также показана на фиг.2а.
На основе анализа результатов иссле: дований напряженного состояния рельсов установлено, что вертикальная эксцентрично приложенная сила вызывает в шейке рельса деформации; от сжатия, прогрессивно уменьшающиеся по мере удаления от места приложения нагрузки, от кручения рельса, от изгиба в вертикальной плоскости. Горизонтальная нагрузка вызывает деформации; от кручения рельса, от изгиба рельса в горизонтальной плоскости. В методе Шлумпфа в формулах (7-10) для относительных деформаций в измеряемых точках учитывается только равномерное сжатие от вертикальной силы (первое слагаемое) и из- гибной момент, изменяющийся по линейному закону, как для защемленной крнсоли (второе слагаемое). Таким образом, формулы для этих деформаций (7-10) не точны, что и приводит к неверному конечному выводу об эквивалентности сигнала только горизонтальной силе без учета влияния вертикальной нагрузки.
Для выяснения влияния вертикальной нагрузки на результаты измерения горизонтальных сил с помощью устройства Шлумп- фз экспериментально изучены напряжения в шейке рельса при действии вертикальной
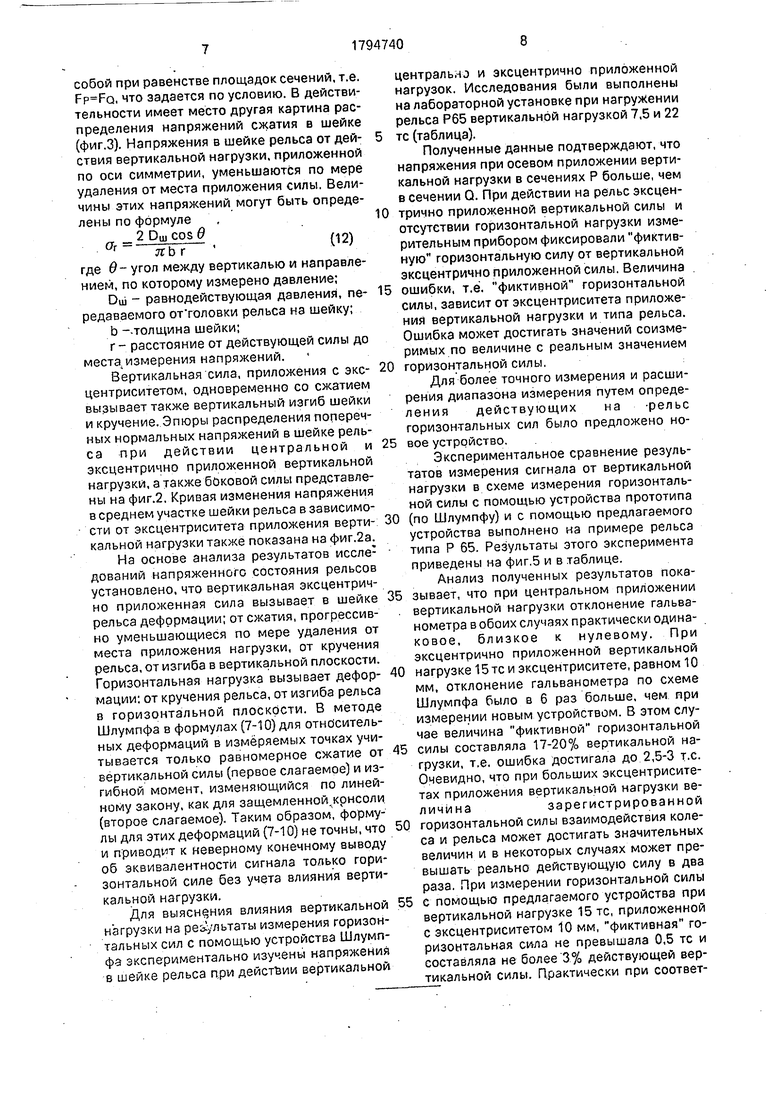
центрально и эксцентрично приложенной нагрузок. Исследования были выполнены на лабораторной установке при нагружении рельса Р65 вертикальной нагрузкой 7,5 и 22
тс (таблица).
Полученные данные подтверждают, что напряжения при осевом приложении вертикальной нагрузки в сечениях Р больше, чем в сечении Q. При действии на рельс эксцен0 трично приложенной вертикальной силы и отсутствии горизонтальной нагрузки измерительным прибором фиксировали фиктивную горизонтальную силу от вертикальной эксцентрично приложенной силы. Величина
5 ошибки, т.е. фиктивной горизонтальной силы, зависит от эксцентриситета приложения вертикальной нагрузки и типа рельса. Ошибка может достигать значений соизмеримых по величине с реальным значением
0 горизонтальной силы.
Для более точного измерения и расширения диапазона измерения путем определения действующих на -рельс горизонтальных сил было предложено но5 вое устройство.
Экспериментальное сравнение результатов измерения сигнала от вертикальной нагрузки в схеме измерения горизонтальной силы с помощью устройства прототипа
0 (по Шлумпфу) и с помощью предлагаемого устройства выполнено на примере рельса типа Р 65. Результаты этого эксперимента приведены на фиг.5 и в таблице.
Анализ полученных результатов пока5 зывает, что при центральном приложении . вертикальной нагрузки отклонение гальванометра в обоих случаях практически одинаковое, близкое к нулевому. При эксцентрично приложенной вертикальной
0 нагрузке 15 тс и эксцентриситете, равном 10 мм, отклонение гальванометра по схеме Шлумпфа было в 6 раз больше, чем при измерении новым устройством. В этом случае величина фиктивной горизонтальной
5 силы составляла 17-20% вертикальной нагрузки, т.е. ошибка достигала до 2,5-3 т.е. Очевидно, что при больших эксцентриситетах приложения вертикальной нагрузки величиназарегистрированной
0 горизонтальной силы взаимодействия колеса и рельса может достигать значительных величин и в некоторых случаях может превышать реально действующую силу в два раза. При измерении горизонтальной силы
5 с помощью предлагаемого устройства при вертикальной нагрузке 15 тс, приложенной с эксцентриситетом 10 мм, фиктивная горизонтальная сила не превышала 0,5 тс и составляла не более 3% действующей вертикальной силы. Практически при соответствующем подборе тензорезисторов (7 и 8) ошибка в измерении горизонтальной силы предлагаемым устройством может быть сведена к нулю.
Устройство для определения давления колеса на рельс работает следующим образом. На шейке 6 рельса 5 размечают места установки тензорезисторов 1,2,3,4 и симметрично относительно вертикальной оси 13 сечения рельса наклеивают эти датчики. При этом вывод от датчиков соединяют в тензометрический мост 7, кроме того после
довательно с первыми активными тензоре- зисторами 1 и 2 в одни плечи мостовой схемы включают резисторы 8 и 9. На диагональ 10 тензомоста 7 подают питание схемы, в диагональ 11 включают регистратор 12 (шлейф осциллографа). При прохождении поезда производят запись сигналов от действия горизонтальных сил на осциллограмму, затем выполняют запись сигналов от действия силы известной величины, т.е. тарируют чувствительность устройства и масштаб записи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794739A1 |
| Устройство для поколесного взвешивания железнодорожных составов | 1988 |
|
SU1509613A1 |
| Устройство для измерения усилий | 1981 |
|
SU972273A1 |
| Способ измерения забега касания гребня железнодорожного колеса и рельса | 1988 |
|
SU1721435A1 |
| Измерительная система для определения коэффициента сцепления колеса с рельсом | 1989 |
|
SU1646934A1 |
| Способ ввода рельсовой плети бесстыкового пути в режим эксплуатации и устройство для его осуществления | 1983 |
|
SU1172978A1 |
| Устройство для измерения контактных напряжений в рельсах | 1979 |
|
SU894407A1 |
| Способ определения продольных усилий в трубчатых элементах | 1978 |
|
SU949358A1 |
| Датчик для измерения продольного усилия в шланге | 1981 |
|
SU979906A1 |
| Устройство для определения давления колес подвижного состава на рельсы | 1988 |
|
SU1654673A1 |
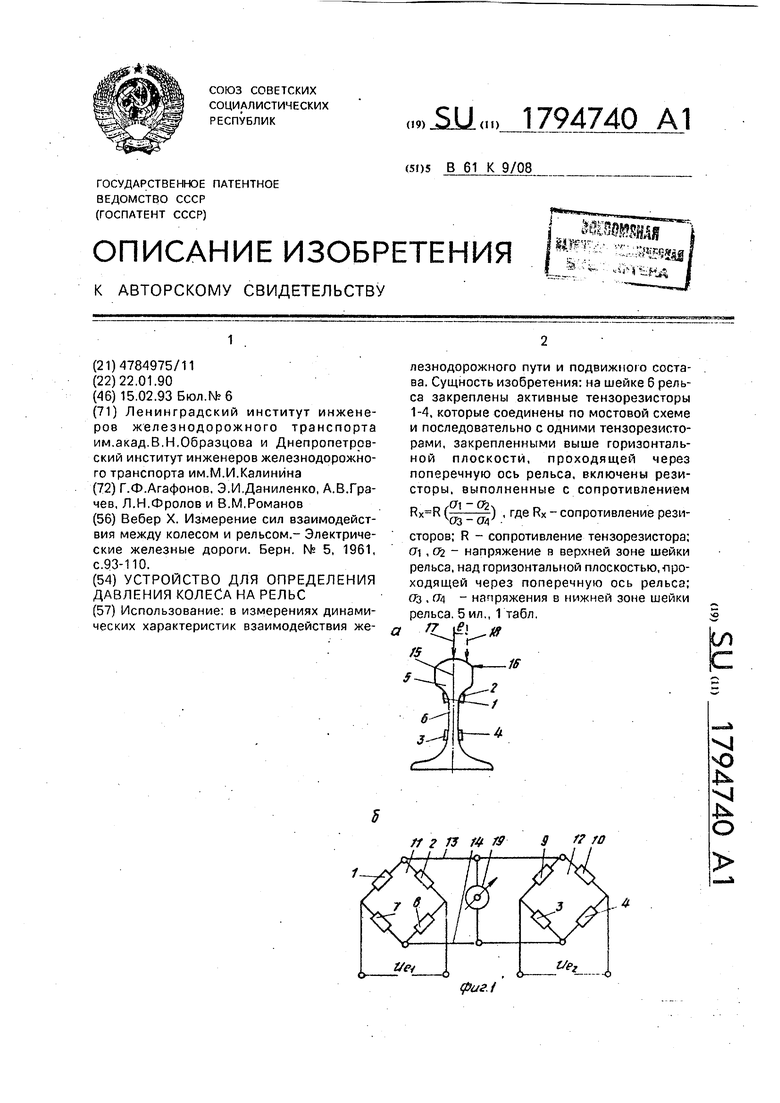
Формула изо.бретения Устройство для определения давления колеса на рельс, содержащее закрепленные на шейке рельса симметрично относительно вертикальной плоскости, проходящей через пррдольную ось рельса попарно одни выше, а другие ниже горизонтальной плоскости, проходящей через поперечную ось рельса, активные тензорезисторы, которыми образованы одно и другое плечи мостовой схемы, в одну диагональ которой включен источник питания, а в другую - регистратор, отличающееся тем, что, с целью расширения диапазона путем определения действующих на рельс горизонтальных сил, последовательно с первыми активными тен- зорезисторами а одни плечи мостовой схемы включены резисторы, которые выполнены с сопротивлением
Rx R
r2LzЈ -n
где RX - сопротивление резисторов;
R - сопротивление активного тензоре- зистора;
01,О2 - напряжения в верхней зоне шейки рельса над горизонтальной плоскостью, проходящей через поперечную ось рельса;
оз, щ - напряжения в нижней зоне шейки рельса под горизонтальной плоскостью, проходящей через поперечную ось рельса.
Б, |В
+ 800 0-800 -I600 КГС/С/Г
Фиг.З
Здектвобоз B(1-2Z Гтосеные- Зшлшм
fe. 4
