Изобретение относится к области управления энергетическими установками тепловых электростанций и станций теплоснабжения с любым видом горючего, в том числе ядерного горючего, и может быть использовано в системах разогрева энергетических установок с принудительной и естественной циркуляцией теплоносителя.
Известны способы управления разогревом энергетической установки с заданной скоростью изменения температуры теплоносителя путем изменения мощности установки регулятором по сигналу управления, пропорционального разности измеренной и заданной мощности и сигнала разности измеренной и заданной скорости изменения температуры теплоносителя [Африкантов И.И. Судовые атомные паропроизводящие установки. Изд. "Судостроение", Л., 1965, стр.239 и 246].
Недостатком известных способов является слабая устойчивость при возникновении возмущений в системе регулирования по мощности, расходу или циркуляции теплоносителя.
Наиболее близким по технической сущности является способ управления разогревом энергетической установки с заданной скоростью изменения температуры теплоносителя путем изменения мощности установки регулятором по сигналу управления, пропорционального разности измеренной и заданной мощности и сигнала разности измеренной и заданной скорости изменения температуры теплоносителя [Африкантов И.И. Судовые атомные паропроизводящие установки. Изд. "Судостроение", Л., 1965, стр.246].
Недостатком известного способа является слабая устойчивость системы управления при возникновении возмущений по мощности, расходу или циркуляции теплоносителя из-за наличия запаздывания в канале регулирования, обусловленного наличием постоянных времени в цепях измерения скорости изменения температуры и транспортного запаздывания в контуре теплоносителя.
Задачей изобретения является повышение устойчивости системы управления.
Поставленная задача решается тем, что в способе управления разогревом энергетической установки с заданной скоростью изменения температуры теплоносителя путем изменения мощности установки регулятором по сигналу управления, пропорционального разности сигналов измеренной мощности и заданной мощности, при этом формируют разность сигналов измеренной и заданной скорости изменения температуры теплоносителя, дополнительно устанавливают заданную мощность, равной мощности разогрева, обеспечивающей заданную скорость разогрева, интегрируют разность сигналов измеренной и заданной скорости изменения температуры теплоносителя и осуществляют управление регулятором разогрева по сумме сигнала управления с сигналом результата интегрирования.
Включение разогрева энергетической установки осуществляют при достижении измеренной мощностью заданной мощности разогрева, значение которой определяют по значению мощности, при которой скорость увеличения температуры достигает заданного значения.
Кроме того, измеряют кратность циркуляции теплоносителя и в соответствии с ее значением устанавливают коэффициент усиления интегрирования.
Кроме того, при изменении отбора мощности, например, изменении расхода теплоносителя, переключении секций парогенератора, формируют сигнал, пропорциональный изменению отбора мощности и суммируют его с сигналом управления.
Кроме того, при изменении давления в процессе разогрева энергетической установки с кипящим теплоносителем измеряют давление теплоносителя и формируют сигнал скорости изменения давления, который суммируют с сигналом скорости изменения температуры.
Кроме того, вводят сигнал остановки разогрева по температуре, который вычитают из сигнала измеренной температуры, результат превышения сигнала измеренной температуры над сигналом остановки разогрева алгебраически суммируют с разностью сигналов измеренной и заданной скорости изменения температуры теплоносителя.
Кроме того, вводят сигнал остановки разогрева по давлению, который вычитают из сигнала измеренного давления, результат превышения сигнала измеренного давления над сигналом остановки разогрева алгебраически суммируют с разностью сигналов измеренной и заданной скорости изменения температуры теплоносителя.
Кроме того, в режиме остановки разогрева алгебраическую разность между сигналом остановки разогрева и сигналом измеренной температуры или сигналом измеренного давления ограничивают до значения, равного сигналу заданной скорости изменения температуры, и результат ограничения используют в качестве сигнала заданной скорости изменения температуры.
Кроме того, в процессе разогрева корректируют по сигналу измеренной температуры сигнал измеренной скорости изменения температуры или сигнал заданной мощности разогрева.
Кроме того, формируют сигнал остановки разогрева, при достижении значения которого сигналом измеренного давления или измеренной температуры отключают сигнал уставки скорости разогрева или сигнал управления.
Кроме того, при пуске энергетической установки с ядерным реактором из критического состояния до уровня мощности разогрева формируют сигнал периода изменения мощности, который алгебраически суммируют с сигналом управления и одновременно перед интегрированием разности сигналов измеренной и заданной скорости изменения температуры теплоносителя алгебраически суммируют с этой разностью сигналов.
Кроме того, при пуске энергетической установки с ядерным реактором из подкритического состояния до уровня мощности разогрева алгебраическую сумму сигналов измеренной мощности, заданной мощности и результата интегрирования ограничивают до значения, равного по значению и противоположного по знаку сигналу заданной скорости разогрева со знаком, соответствующим превышению сигнала заданного уровня мощности разогрева над сигналом измеренной мощности, а результат ограничения перед интегрированием алгебраической суммы сигналов разности сигналов измеренной и заданной скорости изменения температуры теплоносителя и периода изменения мощности алгебраически суммируют с этой суммой сигналов.
Это позволяет практически исключить влияние постоянных времени цепей измерения скорости изменения температуры и транспортного запаздывания в контуре теплоносителя на устойчивость процесса регулирования, а все возмущения в системе регулирования отрабатывать практически по безинерционной составляющей сигнала управления, пропорциональной разности измеренной и заданной мощности. Точность поддержания заданной скорости изменения температуры теплоносителя обеспечивается составляющей сигнала управления, пропорциональной интегрируемой разности сигналов измеренной и заданной скорости изменения температуры теплоносителя. Коррекция сигнала измеренной скорости разогрева или заданной мощности разогрева по сигналу измеренной температуры позволяет сократить время разогрева при сохранении одинакового допустимого значения термических напряжений в конструкциях энергоустановки в течение всего процесса разогрева. Способ обеспечивает устойчивый процесс разогрева при любом типе и состоянии теплоносителя: при естественной и принудительной циркуляции, кипении, компенсации давления паром и практически любых известных видах возмущений в системе автоматического регулирования, а также при использовании в качестве источника энергии ядерного реактора при его автоматическом пуске из критического и подкритического состояния.
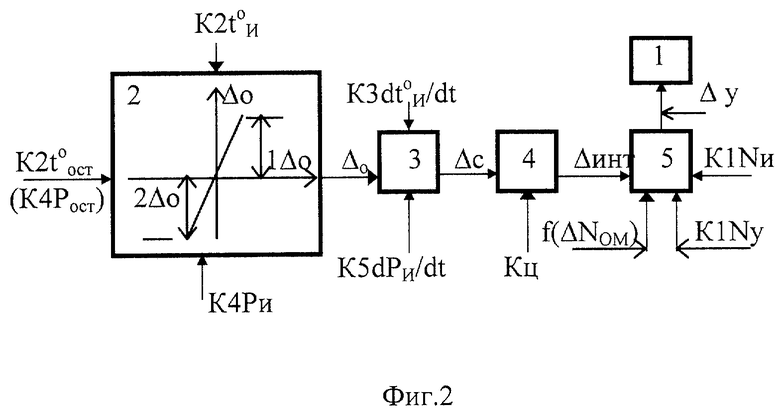
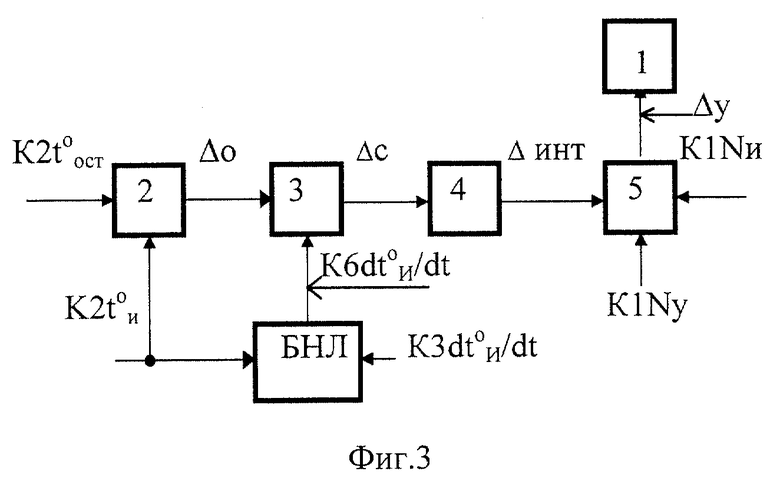
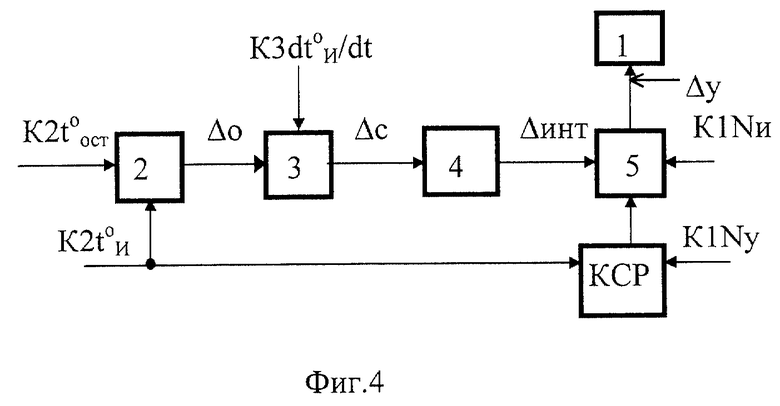
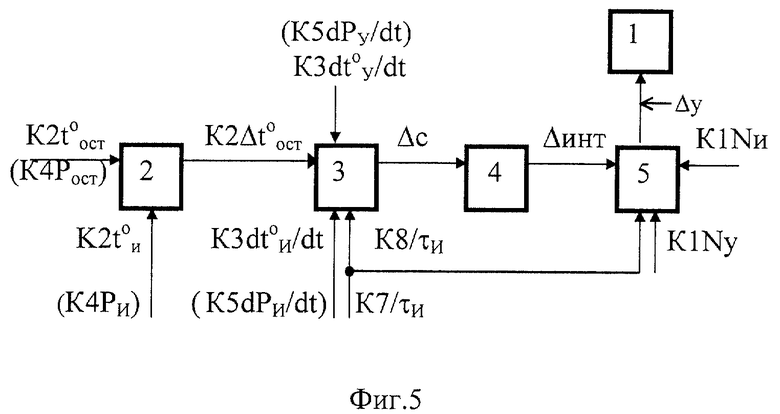
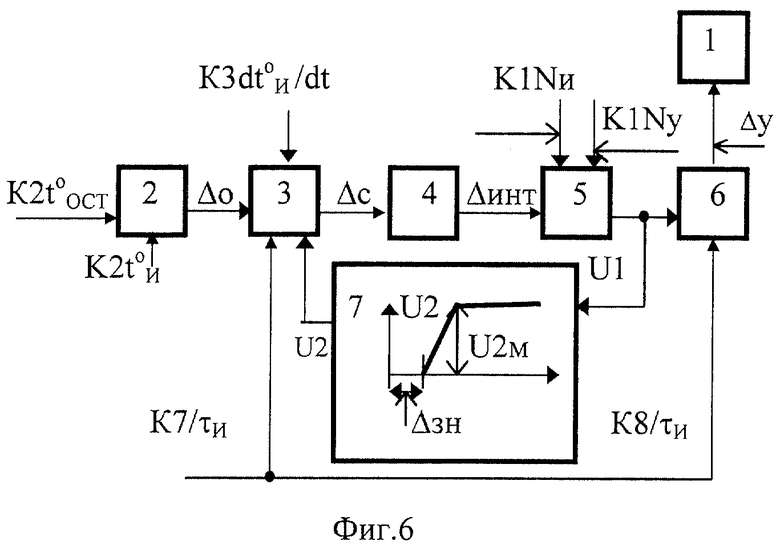
Изобретение поясняется чертежом, где на блок-схемах показаны возможности осуществления всех вариантов способа разогрева энергетической установки: на фиг. 1 по п.1; на фиг.2 по пп.1 и 3...8; на фиг.3 по пп.1, 8 и 10; на фиг.4 по пп. 1, 8 и 11; на фиг.5 по пп.1 и 13; на фиг.6 по пп.1, 13 и 14 формулы изобретения.
Устройство содержит регулятор 1, алгебраический сумматор и ограничитель амплитуды сигнала 2, алгебраические сумматоры 3 и 5, а также 6 на фиг.6, интегратор 4, блок нелинейности БНЛ, корректор скорости разогрева КСР, К1Nи - сигнал измеренной мощности, K2Ny - сигнал заданной мощности разогрева, Δу - сигнал управления, Кц - сигнал кратности циркуляции, К2to и - сигнал измеренной температуры, К2to ост - сигнал заданной температуры остановки разогрева, ΔК2to ост= K2to oc - К2to и - сигнал остановки разогрева по температуре, К3dto/dtи - сигнал скорости изменения измеренной температуры, K3dto/dty - сигнал заданной скорости изменения температуры, К4Ри - сигнал измеренного давления, К4Рост - сигнал заданного давления остановки разогрева (на фиг. 1 и 2 указан в скобках), ΔК4Рост=К4Рост-К4Ри - сигнал остановки разогрева по давлению, K5dP/dtи - сигнал скорости изменения давления, Δо=ΔК2to ост=ΔК4Рост - сигнал заданной скорости разогрева или расхолаживания (уставка скорости разогрева или расхолаживания) по температуре или давлению, 1Δо - уставка скорости разогрева, 2Δо - уставка скорости расхолаживания, Δс - сигнал на входе интегратора 4, равный разности между заданной и измеренной скоростью разогрева по температуре или давлению, сигнал результата интегрирования, сигнал коррекции уровня мощности по скорости разогрева, f(ΔNом) - сигнал коррекции уровня мощности по изменению отбора мощности.
Скорость изменения температуры теплоносителя пропорциональна разности между генерируемой и отбираемой мощностями. Если генерируемая мощность превышает отбираемую, то происходит разогрев теплоносителя. В случае превышения отбираемой мощности над генерируемой температура теплоносителя снижается со скоростью, пропорциональной разности между этими мощностями, происходит расхолаживание энергетической установки.
Разогрев по предлагаемому способу производится следующим образом. Сигнал заданного уровня мощности разогрева K1Ny подается на вход алгебраического сумматора 5, с выхода которого сигнал управления Δу=K1Ny поступает на вход автоматического регулятора 1. Под воздействием регулятора 1 в энергетической установке увеличивается мощность. Когда сигнал измеренной мощности К1Nи станет равным заданному значению K1Ny, сигнал управления будет равен нулю, Δу= 0. Это приведет к разогреву теплоносителя со скоростью изменения температуры, соответствующей установленной в энергетической установке мощности. Если скорость разогрева теплоносителя не будет равна заданной, это будет означать, что поступающий на вход алгебраического сумматора 3 сигнал измеренной скорости изменения температуры K3dto/dtи не будет равен сигналу заданной скорости изменения температуры K3dto/dty (сигнал Δо) (фиг.1). В этом случае разность этих сигналов Δс поступит на вход интегратора 4, с выхода которого сигнал результата интегрирования Δинт поступит на вход алгебраического сумматора 5. Рассмотрим два возможных случая. Первый, когда скорость увеличения температуры dto/dtи меньше заданной dto/dty, то сигнал Δинт на выходе интегратора 4 будет иметь такой же знак, как у сигнала заданного уровня мощности K1Ny, В результате чего сигнал управления Δу, поступающий на вход регулятора 1, станет равен алгебраической сумме сигналов K1Ny, К1Nи и Δинт, то есть Δу=К1Nу+К1Nи+Δинт. Под воздействием регулятора мощность энергетической установки будет увеличиваться до момента, когда сигнал управления Δу станет равным нулю, а сигнал результата интегрирования Δинт=const. Наступит установившийся режим регулирования заданной скорости разогрева. При этом сигнал измеренной мощности, К1Nи, будет равен сумме сигнала заданного уровня мощности, K1Ny, и сигнала результата интегрирования, Δинт, то есть К1Nи= K1Ny+Δинт. В энергетической установке установится значение генерируемой мощности, превышение которой над отбираемой мощностью обеспечивает заданную скорость изменения температуры dto/dty.
Второй случай, если скорость увеличения температуры dto/dtи окажется меньше заданной dto/dty. Тогда, по сравнению с первым случаем, поступающий на вход интегратора 4 сигнал Δс изменит свой знак. Соответственно изменит свой знак сигнал Δинт на выходе интегратора 4 и будет противоположен знаку сигнала заданного уровня мощности K1Ny. Регулятор 1 будет уменьшать мощность до наступления равенств: Δу=0, К1Nи=K1Ny-Δинт, Δинт=const, dto/dty=dto/dtи.
Таким образом, интегратор 4 позволяет установить скорость изменения температуры, равной заданному значению, путем изменения или, можно сказать, коррекции мощности энергетической установки. С помощью динамических расчетов или результатов испытаний скорость интегрирования (или коэффициент усиления интегратора) устанавливается такой малой, чтобы результат интегрирования практически не мог влиять на динамику регулирования мощности, но достаточной, чтобы обеспечить заданную точность поддержания скорости изменения температуры в течение установленного времени для данной системы автоматического регулирования. Быстродействие и устойчивость процесса регулирования мощности обеспечивает сигнал измеренной мощности K1Nи.
Если в процессе разогрева теплоносителя произойдет его кипение, в результате чего будет увеличиваться давление, а скорость изменения температуры, следовательно, и сигнал скорости изменения температуры уменьшатся практически до нуля, на вход интегратора 4 будет поступать сигнал заданной скорости изменения температуры K3dto/dty, a не разность между этим сигналом и сигналом скорости изменения измеренной температуры K3dto/dtи. Интегратор 4 будет интегрировать до наступления в нем насыщения, с его выхода на вход алгебраического сумматора 5 будет постоянно поступать сигнал, в результате чего возникнет такое значение сигнала управления, которое может заставить регулятор 1 увеличивать мощность до недопустимого значения. Чтобы этого не произошло, измеряется давление, по сигналу которого К4Ри формируется сигнал скорости изменения давления K5dP/dtи, который подается на вход алгебраического сумматора 3. Масштаб этого сигнала устанавливается таким, чтобы при равенстве сигналов K3dto/dty и K5dP/dtи скорость изменения давления dP/dtи была равна заданной для данного процесса, dP/dty. Интегратор 4 прекратит изменение сигнала на своем выходе, когда сигнал на его входе Δс станет равным нулю и установится соотношение сигналов K3dto/dty=K3dto/dtи+K5dP/dtи=const. Так как при кипении dto/dtи= 0, то K3dto/dty=K5dP/dtи. Когда сигнал управления Δу станет равным нулю, это будет означать, что регулятор 1 установил значение генерируемой мощности, превышение которой над отбираемой обеспечивает поддержание заданной скорости изменения давления dP/dty.
Разогрев энергетической установки может быть остановлен, когда температура или давление теплоносителя достигнут заданного значения, то есть to ост или Рост.
Если окончание разогрева определяется заданным значением температуры теплоносителя, фиг. 1, то этот процесс осуществляется следующим образом. Сигнал измеренной температуры К2to и поступает на вход алгебраического сумматора 3, на который поступает и сигнал остановки разогрева по температуре К2to ост (сигнал Δо). Когда сигнал измеренной температуры К2to и превысит значение сигнала остановки разогрева K2to ocт, сигнал этого превышения К2Δto ост= К2to и-К2to ост с выхода алгебраического сумматора 2 поступит на вход алгебраического сумматора 3, где произойдет алгебраическое сложение сигнала превышения К2Δto ост с сигналом скорости изменения измеренной температуры K3dto/dtи. Разность Δс между результатом этого сложения и сигналом заданной скорости изменения температуры K3dto/dty поступит на вход интегратора 4. Интегратор 4 будет изменять на своем выходе сигнал Δинт таким образом, что регулятор 1 станет уменьшать мощность энергетической установки, скорость увеличения температуры dto/dtи тоже будет уменьшаться. Соответственно будет уменьшаться сигнал K3dto/dtи и увеличиваться сигнал К2Δto ост на входе алгебраического сумматора 3. Будет происходить замещение сигнала K3dto/dtи сигналом К2Δto oст. Этот процесс будет продолжаться до наступления в системе автоматического регулирования установившегося режима, когда скорость изменения температуры теплоносителя станет равна нулю, dto/dtи=0, и установятся следующие равенства сигналов: Δу= 0, K3dto/dtи=0, Δинт=const, тогда K3dto/dty= К2Δto ост, то есть сигнал на входе интегратора 4 равен нулю, ΣKto, P=0. При этом регулятор 1 при установленном уровне мощности будет поддерживать уровень температуры, соответствующий сигналу остановки разогрева плюс значение превышения сигнала измеренной температуры над сигналом остановки разогрева, to ост+Δto ост.
В случае, когда окончание разогрева при компенсации давления паром теплоносителя определяется наперед заданным значением давления, Рост, на вход алгебраического сумматора 2 подаются сигнал измеренного давления К4Ри и сигнал остановки разогрева по давлению К4Рост (на фиг.1 и 2 этот сигнал указан в скобках). Сигнал К4ΔРост=К4Ри-К4Рост превышения сигнала измеренного давления К4Ри над сигналом остановки разогрева по давлению К4Рост с выхода алгебраического сумматора 2 поступает на вход алгебраического сумматора 3, где арифметически суммируется с сигналом скорости изменения измеренного давления K5dP/dtи. На вход интегратора 4 будет поступать сигнал Δс, равный алгебраической сумме сигналов К4ΔРост; K3dto/dtи; K3dto/dty; K5dP/dtи, а на его выходе сигнал начнет изменяться, заставляя регулятор 1 уменьшать генерируемую мощность. Скорости изменения давления и температуры уменьшатся до нуля, произойдет замещение сигналов K3dto/dtи и K5dP/dtи сигналом К4ΔРост на входе алгебраического сумматора 3. Процесс остановки разогрева закончится, когда сигнал управления Δу станет равным нулю, сигнал на входе интегратора ΣKto, P= 0, а на выходе Δинт= const, сигналы K3dto/dtи=K5dP/dtи=0, K3dto/dtу= К4ΔРост. Регулятор 1 при установленной мощности будет поддерживать заданное значение давления, равное Рост+ΔРост.
Для обеспечения регулирования не только скорости увеличения температуры, но и скорости уменьшения температуры, фиг. 2, амплитуда сигнала K2Δt
Когда производится ограничение амплитуды сигнала превышения сигнала остановки разогрева K2Δt
Ограничение амплитуды сигнала превышения сигнала измеренной температуры К2to и над сигналом остановки разогрева K2Δt
Для обеспечения расхолаживания энергетической установки с кипящим теплоносителем и поддержанием заданной скорости уменьшения давления амплитуду разности между сигналами остановки разогрева и измеренного давления К4ΔРост= К4Ри-К4Рост формируют ограничителем 2 так же, как это производилось при ограничении сигнала K2Δt
Ограничение сигнала разной полярности K2Δt
Скорость интегрирования пропорциональна скорости циркуляции теплоносителя и, соответственно, обратно пропорциональна кратности циркуляции. Поэтому при изменении кратности циркуляции, для сохранения скорости коррекции и устойчивости процесса регулирования мощности, необходимо изменять скорость интегрирования. С этой целью измеритель кратности циркуляции подает на корректирующий вход интегратора 4 сигнал кратности циркуляции Кц, по которому соответственно изменяется скорость интегрирования интегратора 4.
На некоторые возмущения в системе автоматического регулирования сигнал управления реагирует с запаздыванием. Это может вызвать значительные отклонения регулируемого параметра от заданного значения, увеличение времени переходного процесса, ухудшение качества регулирования. К таким возмущениям в системе автоматического разогрева относятся изменение отбора тепла при включении или отключении секций парогенераторов, изменение расхода первичного или вторичного теплоносителя. Если во время переключения секций парогенераторов или изменения циркуляции, расхода теплоносителя одновременно на соответствующую величину мощности, сигнал f(ΔN), изменить заданный уровень мощности при разогреве, то тем самым будет введено опережение, компенсирующее запаздывание реакции сигнала управления на возмущения, создаваемые переключением секций парогенераторов и изменением расхода теплоносителя.
По мере разогрева конструкции энергоустановки прогреваются, термические напряжения в них становятся меньше. Это означает что скорость изменения температуры в процессе увеличения температуры можно увеличивать. Характер и величина зависимости скорости изменения температуры от значения измеренной температуры определяются, фиг. 3, нелинейным блоком БЛН, на вход которого подается сигнал измеренной скорости изменения температуры, K3dto/dtи, а на управляющий вход поступает сигнал измеренной температуры К2to и. С измененным масштабом сигнал измеренной скорости изменения температуры, K6dto/dtи, поступает на вход блока алгебраического суммирования 3. Далее процесс разогрева производится аналогично рассмотренному. Другой вариант изменения скорости разогрева заключается в коррекции заданной мощности разогрева K1Ny по сигналу измеренной температуры К2to и через корректор скорости разогрева КСР, фиг. 4. Сигнал коррекции, поступающий с выхода КСР на вход алгебраического сумматора 5, изменяя тем самым заданную мощность разогрева в зависимости от температуры to и, определяет характеристику изменения скорости разогрева при увеличении температуры.
При использовании в энергетической установке ядерного реактора в качестве источника тепловой энергии необходимо осуществить пуск установки для установления мощности, равной мощности разогрева энергетической установки. Для обеспечения плавного перехода из режима автоматического пуска из критического состояния ядерного реактора в режим автоматического разогрева следует на входе интегратора к разности сигналов заданной и измеренной скоростей изменения температуры прибавить сигнал скорости изменения мощности, точнее сигнал, обратно пропорциональный измеренному периоду изменения мощности K7/τу ядерного реактора, фиг.5. Масштаб коэффициента К7 устанавливается таким, что когда сигнал измеренного значения периода увеличения мощности K7/τи при автоматическом пуске ядерного реактора будет равен сигналу заданного значения скорости разогрева, K3dto y/dt=К2Δto=1Δо, измеренный сигнал периода τИ будет равен заданному значению периода τу автоматического пуска. Тогда с начала и в процессе автоматического пуска на входе интегратора 4 сигнал Δс= 0, так как сигналы K7/τИ = K3dt
При автоматическом пуске и разогреве ядерного реактора сигнал, обратно пропорциональный периоду, используется не только в цепи коррекции мощности по сигналу разогрева, но также в прямом управлении регулятором, сигнал K8/τи. Масштаб коэффициента К8 выбирается таким, что, когда сигнал, обратно пропорциональный измеренному периоду мощности ядерного реактора, K8/τи, установится равным сигналу заданного уровня мощности при разогреве K1Ny, измеренный период τи будет равен заданному значению периода ty при автоматическом пуске ядерного реактора. При рассмотрении работы системы автоматического пуска и разогрева приняты условия, что перед включением системы вход регулятора 1 отключен, а вход интегратора 4 закорочен. При этом состояние сигналов следующее:
Δc = K2Δt
Δу=K1Ny.
При включении системы под действием сигнала управления Δy регулятор 1 начнет вводить положительную реактивность, произойдет увеличение мощности, появится сигнал, обратно пропорциональный периоду, 1/τи. В масштабе К7 он поступит на вход алгебраического сумматора 3 цепи коррекции, а в масштабе К8 на вход алгебраического сумматора 5 цепи управления регулятором 1. Если включение системы производилось, когда ядерный реактор находился в критическом состоянии, то период ядерного реактора быстро достигнет заданного значения, наступит установившийся режим автоматического пуска при равенстве сигналов:
K8/τи = K1Nу,
K7/τи = K2Δt
Δу = Δc = Δинт = K1NИ = 0,
τи = τу.
Регулятор 1 будет поддерживать период увеличения мощности, τ, равный заданному значению τу. Когда мощность ядерного реактора превысит отбираемую, начнется разогрев теплоносителя, появится сигнал скорости увеличения температуры K3dto н/dt, который поступит на вход алгебраического сумматора 3, где будет суммироваться с сигналом K7/τи. На входе интегратора 4 сначала появится и, по мере увеличения мощности, соответственно, сигнала K3dto и/dt, будет увеличиваться сигнал Δс. На выходе интегратора появится и будет увеличиваться сигнал Δинт, который имеет такой же знак, как сигнал K8/τи в алгебраическом сумматоре 5. Появится сигнал управления Δу, заставляющий регулятор 1 уменьшать положительную реактивность, увеличивая период τи, уменьшая сигнал K7/τи и K8/τи до тех пор, пока реактивность не станет равной нулю. Наступит установившийся процесс автоматического разогрева при равенстве сигналов
Δу = K7/τи = K8/τи = Δc = 0; Δинт=const; Δинт+K1Ny=K1Nи; Δo=K3dto и/dt.
Далее процесс разогрева продолжается, как изложено выше.
Способ автоматического регулирования по схеме фиг.5 непригоден при пуске ядерного реактора из подкритического состояния. При включении системы в работу на входе интегратора 4 действует сигнал Δc = Δo = K7/τи, равный сигналу заданного периода увеличения мощности. За время вывода регулятором 1 ядерного реактора в критическое состояние интегратор 4 на своем выходе может получить большое значение сигнала Δинт, которое будет суммироваться с одинаковым по знаку сигналом K1Ny. Это приведет к увеличению фактического значения заданного сигнала, обратно пропорционального периоду (уменьшению фактического значения заданного периода). Во время выхода ядерного реактора в надкритическое состояние заданный период может быть настолько малым, что регулятор 1 создаст такую большую надкритичность, которая вызовет срабатывание аварийной защиты установки.
Способ, исключающий возможность возникновения такого процесса, показан на примере фиг. 6. Он отличается от способа по фиг.5 наличием ограничителя амплитуды сигнала 7, который пропускает сигнал
U1=Δинт+K1Ny-К1Nи
только одного знака: превышение сигнала заданного уровня мощности разогрева K1Ny над сигналом измеренной мощности К1Nи с учетом зоны нечувствительности Δзн. На выходе ограничителя 7 сигнал U2 ограничивается до максимального значения U2м, равного по значению и противоположного по знаку сигналам K3dtoy/dt,  Перед включением системы в работу состояние сигналов следующее:
Перед включением системы в работу состояние сигналов следующее:
Δу = U1 = K1Nу = K8/τи;
U2 = U2м = Δo = 1Δo = K7/τи = K3dt
Так как на вход сумматора 3 поступают равные по величине и разные по знаку сигналы U2м и Δо, то на входе и выходе интегратора 4 сигналы равны нулю. После включения системы в работу на регулятор 1 подается сигнал управления Δу = K1Nу = K8/τи, заставляющий органы регулирования уменьшать отрицательную реактивность, выводить ядерный реактор из подкритического состояния. Пока подкритичность реактора составляет более 2β, при допустимой скорости изменения реактивности по условиям безопасности и обычных параметрах аппаратуры формирования сигнала периода, сигнал измеренного периода практически будет равен нулю, K7/τи = 0. По мере уменьшения подкритичности менее 2β будет увеличиваться сигнал K7/τи на входе сумматора 3 и K8/τи на входе сумматора 5. Сигнал K8/τи будет вычитаться из сигнала K1Nу = K8/τи, уменьшая его, следовательно, увеличивая заданное значение периода tу, уменьшая сигнал управления Δу. Если масштабы сигналов выбраны правильно, то уменьшение сигналов U1 на входе ограничителя 7 и U2 на входе сумматора 3 будут соответствовать увеличению сигналов K7/τи и K8/τи. На входе и выходе интегратора 4 сигналы будут оставаться равными нулю. Когда период ядерного реактора достигнет заданного значения, наступит равенство сигналов:
K8/τи = K1Nу;
Δo = 1Δo = K7/τу;
Δу = Δc = Δинт = U1 = U2 = 0.
Наступит установившийся режим автоматического пуска. Далее система работает, как при пуске из критического состояния.
Предложенный способ управления разогревом энергетической установки позволяет оптимизировать скорость разогрева относительно температурной напряженности конструкций энергоустановки, производить разогрев и расхолаживание с заданной скоростью изменения температуры теплоносителя любого вида и состояния, с любой скоростью циркуляции от принудительной до естественной, под давлением без кипения и с кипением, с обеспечением заданной скорости изменения давления в случае компенсации давления паром теплоносителя. Во всех вариантах разогрева и расхолаживания способ обеспечивает высокую устойчивость за счет быстродействующей составляющей сигнала управления регулятором в виде сигнала измеренной мощности. Одновременно обеспечивается высокая точность поддержания заданной скорости изменения температуры и давления без нарушения устойчивости процесса регулирования путем введения интегратора с необходимой скоростью интегрирования, который создает другую, корректирующую составляющую сигнала управления. Это позволяет практически исключить влияние постоянных времени цепей измерения скорости изменения температуры и транспортного запаздывания в контуре теплоносителя на устойчивость процесса регулирования. Способ обеспечивает устойчивый процесс регулирования при использовании в качестве источника энергии ядерного реактора при плавном переходе с автоматического пуска из критического и подкритического состояния реактора в разогрев энергетической установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАЗОГРЕВОМ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2013 |
|
RU2523625C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2000 |
|
RU2190267C2 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2565772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БЫСТРОДЕЙСТВИЯ ФОРМИРОВАНИЯ АВАРИЙНОГО СИГНАЛА ПО ПЕРИОДУ ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2190265C2 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2013 |
|
RU2529555C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2011 |
|
RU2470392C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2565605C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2013 |
|
RU2539567C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2012 |
|
RU2482558C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА | 2015 |
|
RU2589038C1 |
Изобретение относится к области управления энергетическими установками тепловых электростанций и станций теплоснабжения с любым видом горючего, в том числе ядерного горючего, и может быть использовано в системах разогрева энергетических установок с принудительной и естественной циркуляцией кипящего и некипящего теплоносителя, а также при автоматическом переходе из режима пуска энергетической установки с ядерным реактором из критического или подкритического состояния в режим автоматического разогрева. Техническим результатом изобретения является повышение устойчивости системы управления. Управление разогревом энергетической установки с заданной скоростью изменения температуры теплоносителя осуществляют путем изменения мощности установки регулятором по сигналу управления, пропорционального разности сигналов измеренной мощности и заданной мощности. При этом формируют разность сигналов измеренной и заданной скорости изменения температуры теплоносителя, устанавливают заданную мощность, равную мощности разогрева, обеспечивающей заданную скорость разогрева, интегрируют разность сигналов измеренной и заданной скорости изменения температуры теплоносителя и осуществляют управление регулятором по сумме сигнала управления с сигналом результата интегрирования. В процессе разогрева энергетической установки с кипящим теплоносителем измеряют давление теплоносителя и формируют сигнал скорости изменения давления, который суммируют с сигналом скорости изменения температуры. Остановку разогрева производят по сигналу температуры или давления. При автоматическом переводе из режима пуска энергетической установки с ядерным реактором в режим разогрева в сигнал управления вводят сигнал периода изменения мощности. 11 з.п. ф-лы, 6 ил.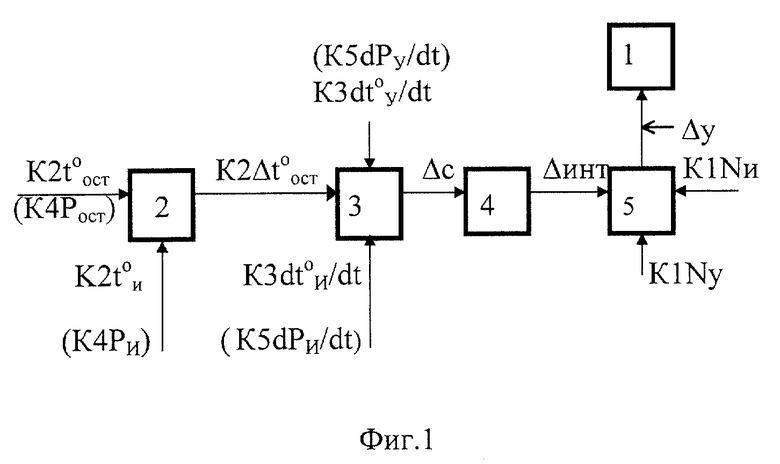
| АФРИКАНТОВ И.И | |||
| Судовые атомные паропроизводящие установки | |||
| - Л.: Судостроение, 1965, с.246 | |||
| RU 2071129 C1, 27.12.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ РАЗОГРЕВОМ РЕАКТОРА | 1993 |
|
RU2068204C1 |
| СПОСОБ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТЕПЛООБМЕННОЙ ПОВЕРХНОСТИ ПАРОГЕНЕРАТОРА РЕАКТОРНОЙ УСТАНОВКИ С ТЯЖЕЛЫМ ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2013 |
|
RU2547447C1 |
| DE 1233069 A, 26.01.1967. | |||
