Устройство предназначено для применения в качестве чувствительного элемента в системах стабилизации, наведения и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (а.с. 742801, МПК7 G 01 P 15/00, опубл. в БИ 23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент, причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель подключен к управляющему входу электронного ключа.
Недостатком устройства является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации.
Наиболее близким по техническому решению является устройство (патент RU 2163380 С1, МПК7 G 01 Р 15/00, опубл. 20.02.2001, бюл. 5), содержащее аналоговый и цифровой каналы. Цифровой содержит схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр. В аналоговый канал введены интегратор, фильтр и преобразователь напряжение-ток, последовательно включенные, причем выход преобразователя напряжение-ток соединен с входом датчика момента, выход усилителя соединен с входом интегратора, второй выход соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, второго дискретизатора, компаратора, итогового регистра, реверсивного счетчика, схемы совпадения соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым и седьмым выходами схемы синхронизации, второй выход первого дискретизатора соединен с первым входом схемы синхронизации, второй выход асинхронного D-триггера соединен с вторым входом схемы синхронизации.
Недостатком данного устройства является низкая точность измерения, обусловленная точностью работы интегратора, связанная с конечностью времени заряда конденсатора. Эта погрешность приводит к апертурной ошибке, соответственной подобной схеме выборки и обработки информации.
Настоящее изобретение решает задачу повышения быстродействия устройства для измерения ускорений.
Это достигается тем, что в устройство для измерения ускорений, содержащее аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла, усилитель, интегратор, стабилизирующий фильтр, преобразователь напряжение-ток и датчик момента, и цифровой канал, включающий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр, причем второй выход интегратора, являющийся аналоговым выходом, соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, второго дискретизатора и компаратора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, второй выход первого дискретизатора соединен с входом схемы синхронизации, а выход итогового регистра является выходом цифрового кода, введен управляющий автомат, первый вход которого соединен с пятым выходом схемы синхронизации, второй вход - с вторым выходом асинхронного D-триггера, а первый, второй и третий выходы управляющего автомата соединены соответственно с вторыми входами итогового регистра, реверсивного двоичного счетчика и схемы совпадения.
Введение в цифровой канал управляющего автомата повышает быстродействие, расширяет полосу пропускания, а введение в отрицательную обратную связь интегратора со стабилизирующим фильтром обеспечивает устойчивость устройства для измерения ускорений.
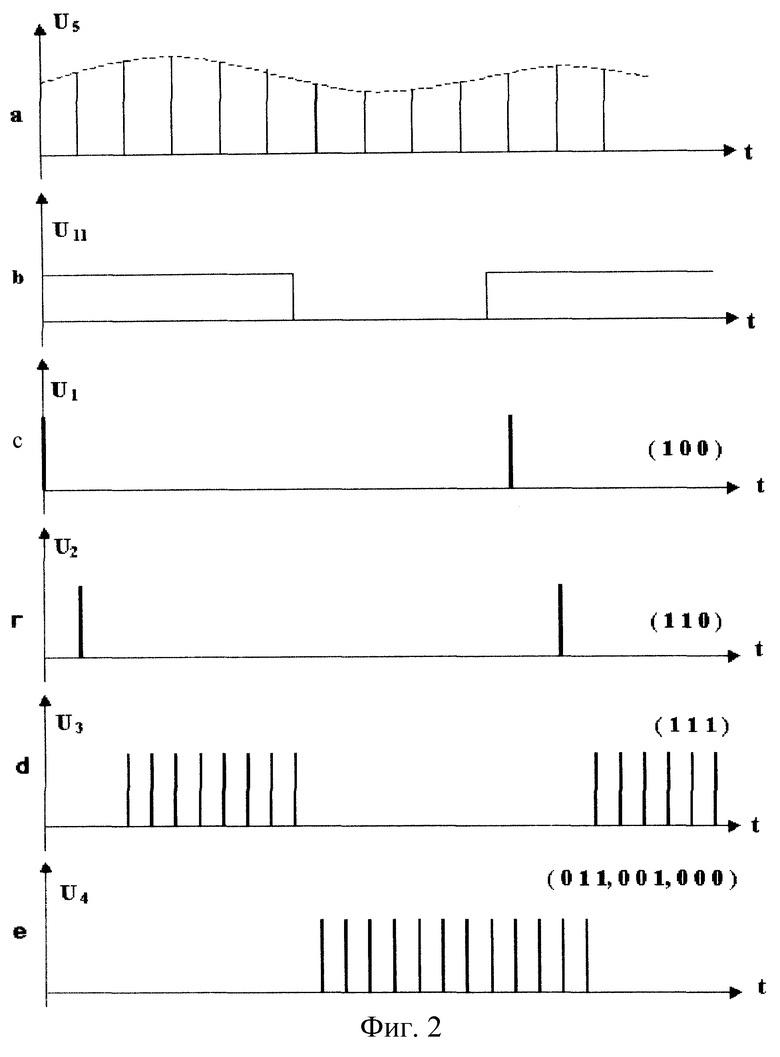
На фиг. 1 изображена блок-схема устройства; на фиг.2 - диаграммы, поясняющие принцип работы устройства; на фиг.3 - граф работы управляющего автомата.
Предлагаемое устройство содержит чувствительный элемент 1, выполненный в виде маятника, датчик угла 2, выход датчика угла соединен с входом усилителя 3, выход которого соединен с входом интегратора 4, первый выход интегратора 4 соединен с входом стабилизатора фильтра 5, выход которого соединен с входом преобразователя напряжение-ток 6, а выход преобразователя напряжение-ток 6 соединен с входом датчика момента 7, второй выход интегратора 4 соединен с первым входом первого дискретизатора 8, первый выход которого соединен с первым входом сумматора 9, выход сумматора 9 соединен с первым входом второго дискретизатора 10, выход второго дискретизатора 10 соединен с первым входом компаратора 11, выход компаратора 11 соединен с входом асинхронного D-триггера 12, второй и третий выходы асинхронного D-триггера 12 соединены с первым и вторым входами схемы совпадения 13, первый и второй выходы схемы совпадения 13 соединены соответственно с первым и вторым входами реверсивного двоичного счетчика 14, выход реверсивного двоичного счетчика 14 соединен с первым входом итогового регистра 15, вторые входы первого дискретизатора 8, сумматора 9, второго дискретизатора 10 и компаратора 11 соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации 16, вход которой соединен с вторым выходом первого дискретизатора 8, пятый выход схемы синхронизации 16 соединен с первым входом управляющего автомата 17, второй вход управляющего автомата 17 соединен с первым выходом асинхронного D-триггера 12, первые входы схемы совпадения 13, реверсивного двоичного счетчика 14 соединены соответственно с третьим и вторым выходами управляющего автомата 17, первый выход управляющего автомата 17 соединен с вторым входом итогового регистра 15.
Внутреннее содержание блоков, реализующих устройство для измерения ускорений, описано в книгах Майоров С.А., Новиков Г.И. Принципы организации цифровых машин. Л.: Машиностроение, 1974, 432 с., П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир., т.1-3, 1999.
Устройство для измерения ускорений работает следующим образом.
При действии ускорения W на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент mlW (l, m длина и масса маятника). Под действием этого момента происходит отклонение чувствительного элемента 1 на угол α. Величина этого угла фиксируется датчиком угла 2, сигнал с которого в виде напряжения поступает на вход усилителя 3, а затем на вход интегратора 4. Сигнал с интегратора 4 в виде напряжения поступает на вход стабилизирующего фильтра 5, который используется не только для обеспечения устойчивости устройства, но и для расширения полосы пропускания. Сигнал с выхода стабилизирующего фильтра 5 поступает на вход преобразователя напряжение-ток 6, сигнал с выхода которого в виде тока поступает на вход датчика момента 7, который развивает момент для компенсации инерционного момента, вызванного действием ускорения. Выходной сигнал с интегратора 4 служит оценкой величины действующего ускорения в аналоговой форме. Сигнал с выхода интегратора 4 в виде напряжения поступает на первый вход первого дискретизатора 8, на второй вход которого поступает управляющий сигнал в виде импульсов с первого выхода схемы синхронизации 16. Первый дискретизатор 8 фиксирует величину аналогового сигнала с интегратора 4 на время преобразования. Напряжение на выходе первого дискретизатора 8 фиксируется с приходом каждого импульса со схемы синхронизации 16. С второго выхода первого дискретизатора 8 сигнал поступает на вход схемы синхронизации 16 и используется для формирования знака поступающей информации, которая смещает сигнал параметрической компенсации в положительную или отрицательную область. Сумматор 9, на первый вход которого поступает сигнал в виде ступенчатого напряжения с первого выхода первого дискретизатора 8, а на второй вход сумматора 9 поступает с второго выхода схемы синхронизации 16 параметрический сигнал треугольной формы, складывает сигнал с выходов 8 и 16, смещаемый в зависимости от знака вверх или вниз. Сигнал с выхода сумматора 9 поступает на первый вход второго дискретизатора 10, на второй вход которого поступает управляющий сигнал с третьего выхода схемы синхронизации 16. Второй дискретизатор 10 запоминает информацию с выхода сумматора 9 на время преобразования. Сигнал с выхода второго дискретизатора 10 поступает на первый вход компаратора 11, в котором происходит сравнение сигнала с выхода второго дискретизатора 10 в аналоговой форме с сигналом треугольной формы, выделенного из стабильного по частоте и амплитуде прямоугольного сигнала с четвертого выхода схемы синхронизации 16. Если сигнал с выхода второго дискретизатора 10 больше треугольного напряжения с выхода схемы синхронизации 16, то на выходе компаратора 11 будет высокий логический уровень, если меньше, то на выходе компаратора 11 - низкий логический уровень. Сигнал с выхода компаратора 11 в виде уровня поступает на вход асинхронного D-триггера 12, сигналы с второго и третьего выхода которого (прямой и инверсный) поступают на соответствующие входы схемы совпадения 13. Первый выход асинхронного D-триггера 12 соединен с вторым входом управляющего автомата 17, первый вход которого соединен с пятым выходом схемы синхронизации 16 (фиг.2а). Сигнал с первого выхода асинхронного D-триггера 12 (фиг.2b) поступает на второй вход управляющего автомата 17, используется для формирования управляющих сигналов записи информации в итоговый регистр 15 (фиг.2г) и установки реверсивного двоичного счетчика в исходное состояние (фиг.2d).
В зависимости от уровня сигнала с асинхронного D-триггера 12 сигналы поступают либо на прямой, либо на инверсные входы схемы совпадения 13. На третий вход схемы совпадения 13 поступают импульсы (фиг.2е) счета с третьего выхода управляющего автомата 17. Выходные сигналы схемы совпадения 13 поступают соответственно на первый и второй входы реверсивного двоичного счетчика 14. В зависимости от уровня сигнала со схемы совпадения 13 сигнал поступает либо на первый суммирующий вход реверсивного двоичного счетчика 14, либо на вычитающий вход реверсивного двоичного счетчика 14. Сигнал в виде цифрового кода с выхода реверсивного двоичного счетчика 14 поступает на информационные входы итогового регистра 15, на второй вход которого поступает импульс записи информации (n1) (фиг.2с) с первого выхода управляющего автомата 17. По импульсу (n2) (фиг.2b) с второго выхода управляющего автомата 17 осуществляется установка счетчика 14 в начальное состояние. Выход итогового регистра 15 является входом цифрового кода устройства для измерения ускорений.
За счет введения в цифровой канал управляющего автомата увеличивается быстродействие устройства для измерения ускорения в три раза. Время преобразования информации и коэффициент эффективности устройства соответственно равны:
где n - разрядность счетчика (14), fт - тактовая частота со схемы синхронизации (16).
У прототипа
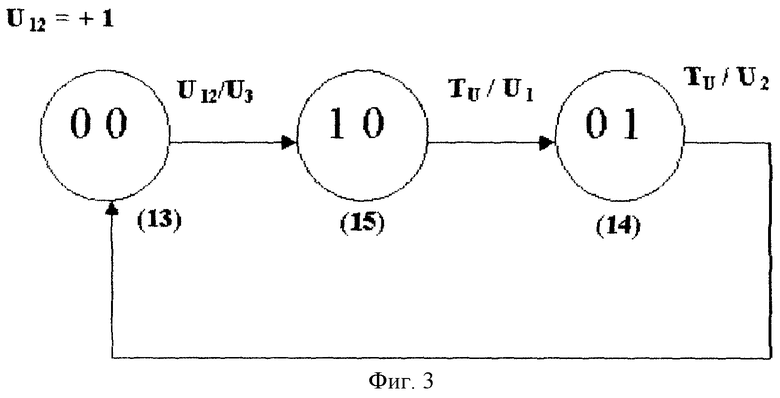
Увеличение быстродействия устройства связано с тем, что начальная установка реверсивного двоичного счетчика 14 не "0" а "+1" (фиг.2d), т.к. единичный импульс используется в качестве импульса записи n1 (фиг.2г), второй импульс используется для установки счетчика (14) в начальное состояние n2 (импульс установки счетчика в начальное состояние "+1").
Граф работы управляющего автомата при поступлении на вход информации U12= 1 представлен на фиг.3 (где Tu - тактовые импульсы). В зависимости от уровня сигнала на триггере 12 (U12) и от импульса U1 управляющего автомата 17 счетчик 15 устанавливается в "1" (при состоянии счетчика 1 0). Затем импульс записывается в итоговый регистр 14 по импульсу U2 и значение в итоговом регистре соответствует значению (при состоянии счетчика 0 1).
Увеличение быстродействия устройства для измерения ускорения приводит к расширению полосы пропускания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190857C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189046C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2008 |
|
RU2363958C1 |
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329513C1 |
Устройство предназначено для использования в качестве чувствительного элемента в системах стабилизации, наведения и навигации. Устройство содержит аналоговый и цифровой каналы. Цифровой канал содержит схему синхронизации, управляющий автомат, два дискретизатора, сумматор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный двоичный счетчик и итоговый регистр. Аналоговый канал содержит интегратор, стабилизирующий фильтр, преобразователь напряжение-ток, датчик угла, датчик момента, усилитель. Обеспечивается повышение быстродействия устройства. 3 ил.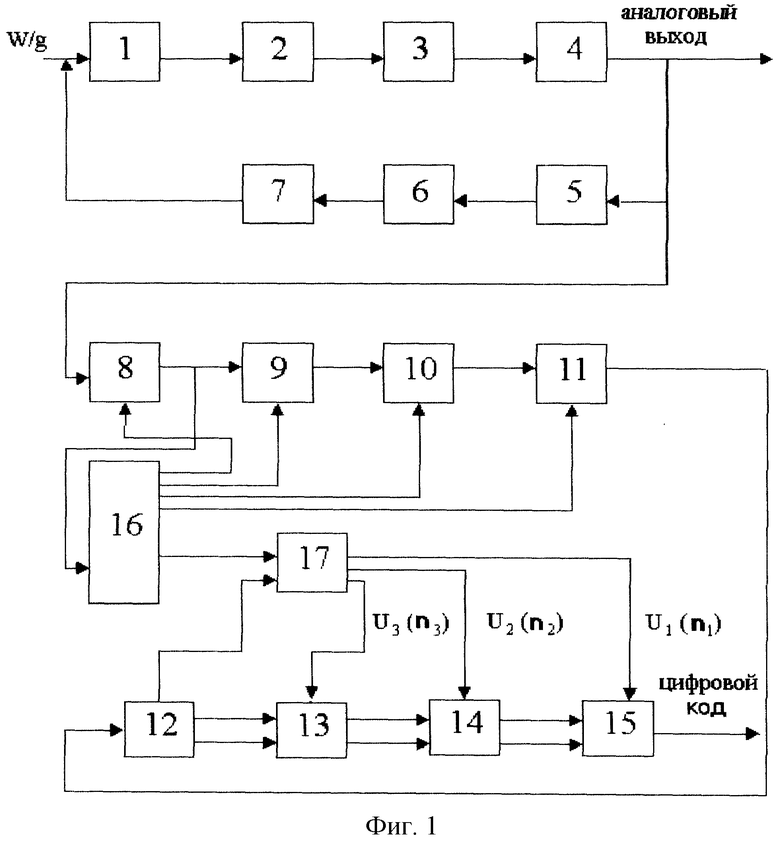
Устройство для измерения ускорений, содержащее аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла, усилитель, интегратор, стабилизирующий фильтр, преобразователь напряжение - ток и датчик момента, и цифровой канал, включающий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр, причем второй выход интегратора, являющийся аналоговым выходом, соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, второго дискретизатора и компаратора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, второй выход первого дискретизатора соединен с входом схемы синхронизации, а выход итогового регистра является выходом цифрового кода, отличающееся тем, что в него введен управляющий автомат, первый вход которого соединен с пятым выходом схемы синхронизации, второй вход - со вторым выходом асинхронного D-триггера, а первый второй и третий выходы управляющего автомата соединены соответственно со вторыми входами итогового регистра, реверсивного счетчика и схемы совпадения.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2165625C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171994C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| US 4932261, 12.06.1990. | |||

