Изобретение предназначено для применения в качестве элемента в системах стабилизации, наведения и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорении, (патент РФ N 2098833, кл. 6 T 01 P 15/13, опубл. 10.12.97), содержащее чувствительный элемент, включающий в себя два неподвижных электрода и подвижную пластину, три усилителя, два резистора, при этом выход первого усилителя подключен к первому резистору, а вход второго усилителя соединен со вторым резистором и является выходом устройства. Для повышения помехоустойчивости при воздействии электрических помех в него введен источник опорного напряжения, генератор электрического сигнала, две транзисторные пары, три резистора, два конденсатора, позволяющих за счет охвата усилителей отрицательной обратной связью, осуществить компенсацию электрических помех.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления в жесткой отрицательной обратной связи ограничен условием устойчивости системы. Кроме того, устройство содержит аналоговый канал обработки информации, что приводит к низкой точности измерения, так как не производится запоминание информации за время ее преобразования и ее осреднение в процессе накопления.
Наиболее близким по техническому решению является устройство (авт.св. N 742801, опубл. в бюл. изобретений N 23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент, причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент, дополнительный интегрирующий усилитель подключены к управляющему входу электронного ключа.
Недостатком устройства является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации. Основная погрешность устройства связана с конечностью времени заряда конденсатора интегрирующего усилителя. Эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации.
Настоящее изобретение решает задачу повышения точности измерения ускорения.
Это достигается тем, что в устройство для измерения ускорений, содержащее аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла и усилитель, датчик момента, введен цифровой канал, содержащий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр, а в аналоговый канал дополнительно введены последовательно соединенные интегратор, стабилизирующий фильтр и преобразователь напряжение - ток, причем выход преобразователя напряжение - ток соединен со входом датчика момента, выход усилителя соединен со входом интегратора, второй выход которого, являющийся аналоговым выходом, соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, второго дискретизатора, компаратора, итогового регистра, реверсивного счетчика, схемы совпадения соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым и седьмым выходами схемы синхронизации, второй выход первого дискретизатора соединен с первым входом схемы синхронизации, второй выход асинхронного D-триггера соединен со вторым входом схемы синхронизации, а выход итогового регистра является выходом цифрового кода.
Введение в отрицательную обратную связь интегратора со стабилизирующим фильтром обеспечивает устойчивость устройства для измерения ускорений. Повышение точности осуществляется за счет астатизма первого порядка (интегратор в обратной цепи), а также за счет формирования в устройстве аналогового и цифрового выходов.
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - структурная схема устройства.
Предлагаемое устройство содержит чувствительный элемент 1, выполненный в виде маятника, датчик угла 2, выход датчика угла 2 соединен с входом усилителя 3, выход которого соединен с входом интегратора 4, первый выход интегратора 4 соединен с входом стабилизирующего фильтра 5, выход которого связан с входом преобразователя напряжение - ток 6, а выход преобразователя напряжение - ток 6 соединен с входом датчика момента 7, второй выход интегратора 4 соединен с первым входом первого дискретизатора 8, первый выход которого соединен с первым входом сумматора 9, выход сумматора 9 соединен с первым входом второго дискретизатора 10, выход второго дискретизатора 10 соединен с первым входом компаратора 11, выход компаратора 11 соединен с входом асинхронного D-триггера 12, второй и третий выходы D-триггера 12 соединены с первым и вторым входами схемы совпадения 13, первый и второй выходы схемы совпадения 13 соединены соответственно с первым и вторым входами реверсивного счетчика 14, выход реверсивного счетчика 14 является первым входом итогового регистра 15, второй вход которого соединен с пятым выходом схемы синхронизации 16, второй вход первого дискретизатора 8 соединен с первым выходом схемы синхронизации 16, второй выход первого дискретизатора 8 является первым входом схемы синхронизации 16, второй вход сумматора 9 соединен со вторым выходом схемы синхронизации 16, второй вход второго дискретизатора 10 соединен с третьим выходом схемы синхронизации 16, второй вход компаратора 11 соединен с четвертым выходом схемы синхронизации 16, первый выход асинхронного D-триггера 12 соединен со вторым входом схемы синхронизации 16, третий вход схемы совпадения 13 соединен с седьмым выходом схемы синхронизации 16, третий вход реверсивного счетчика 14 соединен с шестым выходом схемы синхронизации 16, второй вход итогового регистра 15 соединен с пятым выходом схемы синхронизации 16.
Внутреннее содержание блоков, реализующих устройство для измерения ускорения, описаны в книге Майоров, С.А. Новиков Г.И Принципы организации цифровых машин. Л.: Машиностроение, 1974. 432 с. Схема синхронизации - 64 с., асинхронный D-триггер - 64-67 с., регистры - 113., сумматоры - 152 с., компараторы -151 с, функциональная схема дискретизатора описана в книге Карташев В.Г. Основы теории дискретных сигналов и цифровых фильтров М: Высшая школа, 1982, с. 18-29. Кроме того, блоки описаны в книге П. Хоровиц. У.Хилл: Искусство схемотехники, М: Мир., т. 1-3, 1993 г.
Устройство для измерения ускорений работает следующим образом.
При действии ускорения W на чувствительный элемент 1, выполненный в виде маятника, действуют инерционный момент, равный mlW (l, m - длина и масса маятника). Под действием этого момента происходит отклонение чувствительного элемента 1 на угол α. Величина этого угла фиксируется датчиком угла 2, сигнал с которого в виде напряжения поступает на вход усилителя 3, а затем на вход интегратора 4. Сигнал с интегратора 4, в виде напряжения, поступает на вход стабилизирующего фильтра 5, используемый не только дли обеспечения устойчивости устройства для измерения ускорения (схемы реализации фильтра приведены в книге Г. Лэм Аналоговые и цифровые фильтры. Расчет и проектирование. М: Мир, 1982, с. 127-195), но и для расширения полосы пропускания.
Сигнал с выхода стабилизирующего фильтра 5 поступает на вход преобразователя напряжение - ток 6, сигнал с выхода которого в виде тока поступает на вход датчика момента 7. Датчик момента 7 развивает момент, который компенсирует действие инерционного момента, вызванного действием ускорения. Чувствительный элемент 1 под действием момента, развиваемого датчиком момента 7, возвращается в исходное положение (сигнал на выходе датчика угла Uду2 = 0 Выходной сигнал с интегратора 4 служит оценкой величины действующего ускорения W в аналоговой форме Uинт=kW, где k - коэффициент пропорциональности. Сигнал с второго выхода интегратора 4 в виде напряжения поступает на первый вход первого дискретизатора 8, на второй вход которого поступает управляющий сигнал в виде импульсов с первого выхода схемы синхронизации 16. Первый дискретизатор 8 фиксирует величину аналогового сигнала с интегратора 4 на время преобразования.
Напряжение на выходе первого дискретизатора 8 фиксируется с приходом каждого импульса со схемы синхронизации 16. Со второго выхода первого дискретизатора 8 сигнал поступает на первый вход схемы синхронизации 16 и используется для формирования знака поступающей информации, которая смещает сигнал параметрической компенсации в положительную или отрицательную область. Сумматор 9, на первый вход которого поступает сигнал в виде ступенчатого напряжения с первого выхода первого дискретизатора 8, а на второй вход сумматора 9 поступает с второго выхода схемы синхронизации 16 параметрический треугольный сигнал Uτ, складывает сигнал с выходов схемы первого дискретизатора 8 и треугольной пилы, смещаемой в зависимости от знака, вверх или вниз. Сигнал с первого выхода сумматора 9 поступает на первый вход второго дискретизатора 10, на второй вход которого поступает управляющий сигнал с третьего выхода схемы синхронизации 16. Второй дискретизатор 10 запоминает информацию с выхода сумматора 9 на время преобразования. Сигнал с первого выхода второго дискретизатора 10 поступает на первый вход компаратора 11. В компараторе 11 происходит сравнение сигнала с выхода второго дискретизатора 10 в аналоговой форме с сигналом треугольной формы, выделенного из стабильного по частоте и амплитуде прямоугольного сигнала с четвертого выхода схемы синхронизации 16.
Если сигнал с первого выхода второго дискретизатора 10 больше треугольного напряжения с выхода схемы синхронизации 16, то на выходе компаратора 11 будет высокий логический уровень, если меньше, то на выходе компаратора 11 - низкий логический уровень. Сигнал с выхода компаратора 11 в виде уровня поступает на вход асинхронного D-триггера 12, сигналы со второго и третьего выхода которого (прямой и инверсный) поступают на первый и второй входы схемы совпадения 13. Первый выход асинхронного триггера 12 поступает на второй (прямой) вход схемы синхронизации 16, которая используется для формирования управляющих сигналов записи информации в итоговый регистр 15 и установки реверсивного счетчика 14 в исходное состояние, если число переходов выхода D-триггера 12 с низкого уровня на высокий равно заданному количеству. В зависимости от уровня сигнала с асинхронного D-триггера 12, сигналы поступают либо на прямой, либо на инверсные входы схемы совпадения. На третий вход схемы совпадения 13 поступают импульсы счета с седьмого выхода схемы синхронизации 16. Выходные сигналы схемы совпадения 13 поступают соответственно на первый и второй входы реверсивного счетчика 14. В зависимости от уровня сигнала со схемы совпадения 13 сигнал поступает либо на первый суммирующий вход реверсивного счетчика 14, либо на вычитающий со второго выхода схемы совпадения 13. Сигнал в виде цифрового кода с выхода реверсивного счетчика 14 поступает на информационные входы итогового регистра 15, на второй вход которого поступает импульс записи информации с пятого выхода схемы синхронизации 16. По импульсу с шестого выхода схемы синхронизации 16 осуществляется установка счетчика 14 в начальное состояние. Выход итогового регистра 15 является выходом цифрового кода устройства для измерения ускорений.
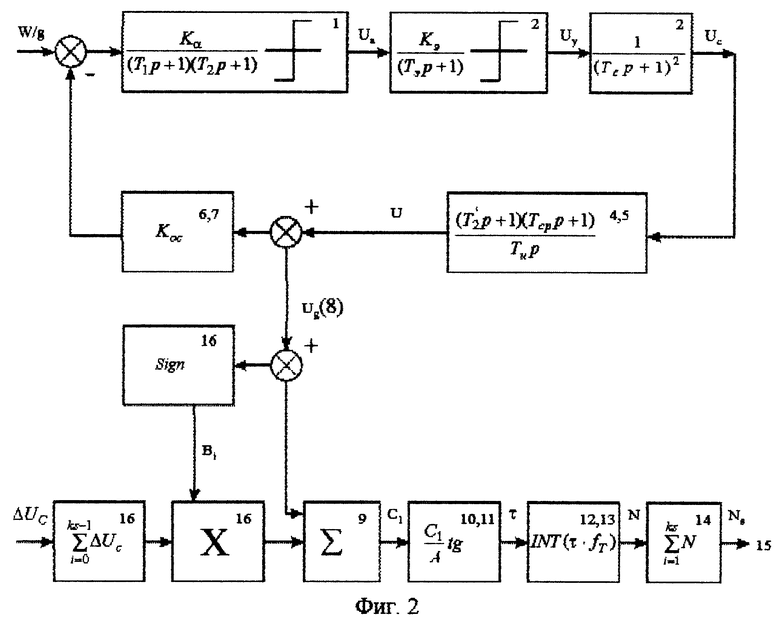
Техническую эффективность предлагаемого устройства можно оценить с помощью передаточных функций по структурной схеме, изображенной на фиг. 2. В структурной схеме использованы следующие обозначения:
T1, T2 - постоянные времени чувствительного элемента;
Kα - коэффициент передачи датчика угла;
К3 - коэффициент передачи усилителя;
Т3 - постоянная времени усилителя;
Тс - постоянная времени сглаживающего фильтра;
Ти, Т'г, Тф - постоянные времени интегратора (Т'г = Тг);
Кос - коэффициент передачи обратной связи;
p=d/dt - символ преобразования Лапласа,
τ, tд, ft - длительность импульса, время дискретизации, тактовая частота;
N, NS - цифровой код, накопленный цифровой код;
Uα, Uу, Uс, U, Uд - напряжения с выхода датчика угла, усилителя, сглаживающего фильтра, интегратора, дискредизатора; (Uд = tдK, где K=0,1,2...);
ωср - частота среза аналоговой части предлагаемого устройства;
δ - относительная ошибка;
n - разрядность однократного преобразователя (разность счетчика);
KS - число суммирований;
А - амплитуда пилы;
INT(Uд, tд KS ft/A) - целая часть от произведения напряжения дискретизации за время дискретизации на число суммирования и тактовую частоту, деленное на амплитуду пилы;
B1 = Σ
Δ Uс=А/(2nKS)
Ci=Uд+B1
τ = Citд/A - преобразование сигнала в длительность;
NS = Σ
N=INT( τ tT)
На вход устройства поступает относительное ускорение W/g (g - ускорение силы тяжести). Величина этого ускорения действует на чувствительный элемент, динамика работы которого определяется двумя постоянными времени T1 и T2. Отклонение чувствительного элемента фиксируется датчиком угла с коэффициентом передачи Kα (чувствительный элемент имеет ограничение по углу отклонения ± 1/30 рад). Выходной сигнал Uα с датчика угла поступает на вход полосового усилителя Uу, который усиливает сигнал на несущей частоте и передаточная функция которого имеет вид:
Kуp/(Tуp2 +2ζуTуp+1),
где Kу - коэффициент усиления, Tу, ζу - постоянная времени усилителя, относительный коэффициент демпфирования.
Если усилитель усиливает сигнал Uу по огибающей, то передаточная функция усилителя запишется как
K3/(Т3p+1),
где Kэ = Kу/2ζу, Tз = Tу/ζу.
Полосовой усилитель имеет ограничения по выходному сигналу (± 10 B). После преобразования несущей частоты в сигнал по огибающей имеет место значительный уровень помех; для выделения постоянной составляющей помехи используют два сглаживающих фильтра с постоянной времени Tс. Сигнал Uс с фильтра поступает на вход интегратора, причем параметры интегратора связаны передаточной функцией как
(T'rp+1)(Tфp+1)/Tиp,
где - Ти > T'г; Tи > Tф.
Параметры интегратора выбраны таким образом, чтобы обеспечить равенство Т2=T'2.
Постоянная времени Тф обеспечивает необходимые запасы устойчивости аналогового канала устройства для измерения ускорений. Сигнал с выхода интегратора U через коэффициент обратной связи поступает в цепь компенсирующей обратной связи.
В фиксированные моменты времени сигнал с выхода интегратора запоминается в дискретизаторе на время преобразования (Uд).
Дискретизированный сигнал Uд складывается с сигналом со схемы синхронизации, преобразуется в длительность τ и с помощью счета временного интервала преобразуется в цифровой код N, а затем на выходе, путем накопления - в цифровой код NS.
Для оценки точности работы предлагаемого устройства предположим, что на вход устройства поступает относительное ускорение, изменяющееся по синусоидальному закону, и устройство работает в установившемся режиме. Пусть также Tз ≪ 1/ωср и Tс ≪ 1/ωср. С учетом принятых ограничений структурная схема (фиг. 2) преобразуется к виду: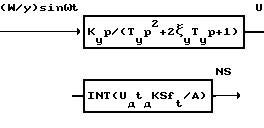
В структурной схеме использованы следующие обозначения:
T2=ТоТи/KоКос, 2 ζ T=Ти/KоKос,
T0 = T1/(1+KαKзKосTф/Tи),
K0 = KαKз/(1+KαKзKосTф/Tи).
Амплитуда частотной характеристики A(ω) аналоговой части определяется как:
Если выбрать параметры устройства так, чтобы выполнялось условие 2T2ω2 = 4ζ2T2ω2, то получим: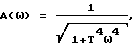
Потребуем, чтобы A(ω) аналоговой части устройства не отличалась от требуемой на величину относительной ошибки δ, которая определяется зависимостью:
δ =1/(2n-1)KS
С учетом значения относительной ошибки параметры эквивалентной структурной схемы определятся, как: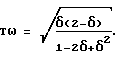
При параметрах n=12; KS=27-1 получим
δ = 1.92·10-6
T ω = 4.428·10-2
На частоте полезного сигнала ω = 5c-1 постоянная времени аналоговой части Т=8.856·10-3с.
Оценим относительную ошибку аналогового (δа), цифрового каналов (δц), суммарную относительную ошибку (δΣ) предлагаемого устройства
Величины ошибок рассчитываются при следующих отношениях.
Примем значения
αmax = Wmax/g = 0,1 - максимально возможный угол отклонения чувствительного элемента;
α = 0,09sinwt - закон изменения текущего угла отклонения чувствительного элемента;
Kос = 0,01; Uд = 0,09Aωsinωt/Kос;
A=10
Относительная ошибка δа устройства для измерения ускорений равна
δa = (α-UдKос)/0,1,
Относительная ошибка цифрового канала устройства δц может быть определена, как
δц= U/A=NS/(212-1)KS
Суммарная относительная ошибка цифрового канала устройства δц может быть оценена, как:
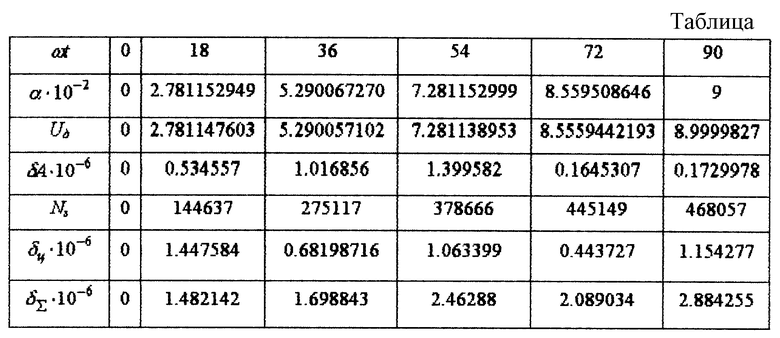
Результаты расчета ошибок устройства сведены в таблицу. Из таблицы следует, что δa и δц не принимают расчетного значения относительной ошибки
δ =1.92·10-6
Суммарная ошибка δΣ превышает расчетное и поэтому параметры устройства Тω следует выбирать меньше в 1.11 раза.
При тактовой частоте fт= 10·106 Гц время дискретизации сигнала будет равно
tд=KS(2n-1)/tT=(27-1)(212-1)/ 10·106=5.2·10-2с
При этом период синусоиды (входная информация) α = 0,09sinωt опрашивается при значении ω = 5 с-1.
Nопроса = (2π/ω)(1/tд) = 24 раза.
(6 значений опроса 1/4 синусоиды приведены в таблице). Время преобразования вторым дискретизатором цифрового канала предлагаемого устройства составило
tдв=tд/KS=5.2·10-2/127=4.094488188·10-4с
и будет в 127 раз меньше времени первой дискретизации.
Предлагаемое устройство для измерения ускорения с 12-ти разрядным преобразованием по точности будет эквивалентно устройству для измерения ускорений с 19-ти разрядным преобразователем.
Таким образом, введение в устройство цифрового канала, содержащего первый дискретизатор, сумматор, второй дискретизатор, компаратор, синхронный D-триггер, схему совпадения, реверсивный счетчик, итоговый регистр, схему синхронизации, а также введение аналогового канала, содержащего интегратор, стабилизирующий фильтр, позволило повысить точность измерения за счет сканирования аналогового сигнала в цифровой код.
Наличие дискретизаторов приводит к запоминанию информации на время преобразования, что исключает апертурную ошибку, связанную с изменением входной информации, что в свою очередь увеличивает точность измеряемой величины (ускорения). Устройство содержит накопитель цифровой информации, что уменьшает ошибку измерения, связанную с искажением входной информации на частоте входного сигнала, близкой к времени преобразования информации. В предлагаемом устройстве происходит усреднение входной информации в процессе ее накопления, что также повышает точность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190858C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190857C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2008 |
|
RU2363958C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189046C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2260189C1 |
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2575771C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
Изобретение относится к области приборостроения и может быть использовано в системах стабилизации, навигации и стабилизации, навигации и наведения в качестве чувствительного элемента. Устройство содержит аналоговый и цифровой каналы. Цифровой канал содержит схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр. В аналоговый канал введены интегратор, стабилизирующий фильтр и преобразователь напряжение-ток, включенные последовательно. Наличие дискретизаторов приводит к запоминанию информации на время преобразования, что исключает апертурную ошибку, связанную с изменением входной информации, что в свою очередь повышает точность измеренной величины. Устройство содержит накопитель цифровой информации, что уменьшает ошибку измерения, связанную с искажением входной информации на частотах входного сигнала, близкой к времени преобразования информации. Происходит усреднение входной информации в процессе ее накопления, что также повышает точность. 1 табл., 2 ил.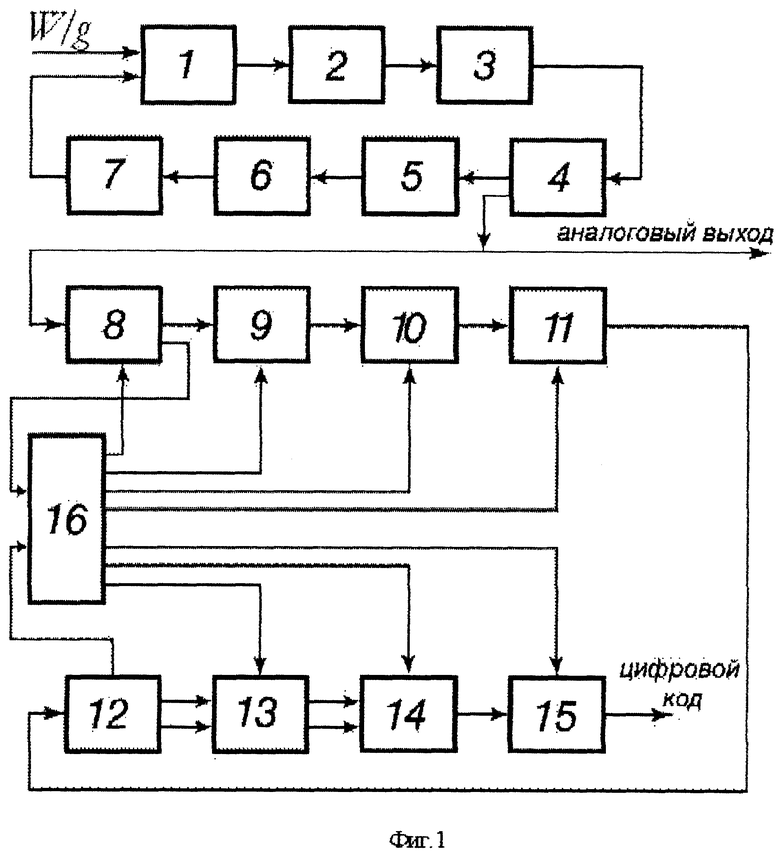
Устройство для измерения ускорений, содержащее аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла и усилитель, датчик момента, отличающийся тем, что в него введен цифровой канал, содержащий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, асинхронный D-триггер, схему совпадения, реверсивный счетчик и итоговый регистр, а в аналоговый канал дополнительно введены последовательно соединенные интегратор, стабилизирующий фильтр и преобразователь напряжение-ток, причем выход преобразователя напряжение-ток соединен со входом датчика момента, выход усилителя соединен со входом интегратора, второй выход которого, являющийся аналоговым выходом, соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, второго дискретизатора, компаратора, итогового регистра, реверсивного счетчика, схемы совпадения соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым и седьмым выходами схемы синхронизации, второй выход первого дискретизатора соединен с первым входом схемы синхронизации, второй выход асинхронного D-триггера соединен со вторым входом схемы синхронизации, а выход итогового регистра является выходом цифрового кода.
| Акселерометр | 1977 |
|
SU742801A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| RU 2055367 C1, 27.02.1996 | |||
| US 4336718, 29.06.1982 | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
