Изобретение относится к приборостроению и может быть использовано для перемещения и микропозиционирования объектов и микрозондов в приборах для исследования поверхности, оптических и биофизических установках, различных микроскопах и микророботах для решения задач физики твердого тела, микроэлектроники, биофизики и нанотехнологии, а также прецизионном станкостроении.
Известен пьезоэлектрический привод, содержащий два электромагнитных схвата, соединенных между собой через пьезоэлектрический элемент (см. описание к заявке Японии 11069847, Н 02 N 2/00, 1999 /1/). Известный привод обеспечивает движение перемещаемого тела относительно базовой поверхности за счет поочередной его фиксации схватами в результате подачи напряжения или снятия его с пьезоэлемента в промежутках между фазами фиксации.
Недостатком известного привода является то, что он пригоден только для перемещения ферромагнитных тел и для обеспечения его работы требуются электромагниты, потребляющие значительное количество электроэнергии. Кроме того, известное устройство нецелесообразно использовать в прецизионных миниатюрных приборах, так как возникающие в схватах электромагнитные поля могут вызвать сбои в работе микроэлектронных схем.
Известен прецизионный позиционирующий привод, содержащий два пьезоэлектрических фиксатора, упирающиеся своими торцами в стенки канала, выполненного в основании, и размещенные между ними пьезоэлементы, обеспечивающие перемещение вдоль канала (см. описание к заявке Японии 10323064, Н 02 N 2/00, 1998 /2/).
Недостатком известного устройства является сложность его реализации. Учитывая, что перемещения пьезоэлектрических элементов, из которых выполнены фиксаторы, составляют несколько микрон, а упираются они торцами в боковые стенки канала, то требования к точности выполнения плоскостности стенок и их параллельности являются очень высокими, в противном случае будет происходить либо заклинивание привода в канале, либо будет отсутствовать фиксация.
Наиболее близким к заявляемому по своей технической сущности и достигаемому результату является пьезоэлектрический привод, содержащий размещенное в корпусе перемещаемое тело в виде многогранника (параллелепипеда), взаимодействующее с зажимом с пьезоэлектрическим элементом, присоединенным к источнику напряжения, и снабженное средством для приложения усилия к перемещаемому телу вдоль его продольной оси, которое в данном случае выполнено в виде соединенного с зажимом пьезоэлектрическим элементом, обеспечивающим возвратно-поступательное перемещение зажима относительно продольной оси параллелепипеда (см. описание к заявке Японии 02151276, Н 02 N 2/00, 1990 /3/).
Недостатком известного устройства является сложность его изготовления, поскольку к точности выполнения зажима и перемещаемого тела предъявляются высокие требования по соблюдению их размеров, плоскостности и параллельности. Отклонение от них ведет либо к заклиниванию перемещаемого тела, либо к неработоспособности из-за отсутствия фиксирующего усилия на зажиме.
Заявляемый в качестве изобретения пьезоэлектрический привод направлен на упрощение технологии его изготовления за счет снижения требований к точности изготовления узлов, входящих в его состав.
Указанный результат достигается тем, что прецизионный пьезоэлектрический привод содержит перемещаемое тело, выполненное в виде многогранника, средство для приложения к нему усилия вдоль его продольной оси, взаимодействующий с ним зажим с пьезоэлементом и источник напряжения, подключенный к нему, при этом зажим выполнен в виде по крайней мере двух пар пьезоэлементов, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима тела к ним, а источник напряжения выполнен с возможностью управления пьезоэлементами то постоянным, то переменным напряжением с подачей последнего на соседние элементы в противофазе.
Отличительными признаками заявляемого изобретения являются:
- выполнение зажима в виде по крайней мере двух пар пьезоэлементов, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима тела к ним;
- выполнение источника напряжения с возможностью снабжения пьезоэлементов то постоянным, то переменным напряжением с подачей последнего на соседние пьезоэлементы в противофазе.
Выполнение зажима в виде по крайней мере двух пар пьезоэлементов, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима тела к ним позволяет снизить требования к точности изготовления как пьезоэлементов, так и перемещаемого тела за счет реализуемого устройством алгоритма работы, обеспечиваемого предлагаемой конструкцией и указанным источником напряжения.
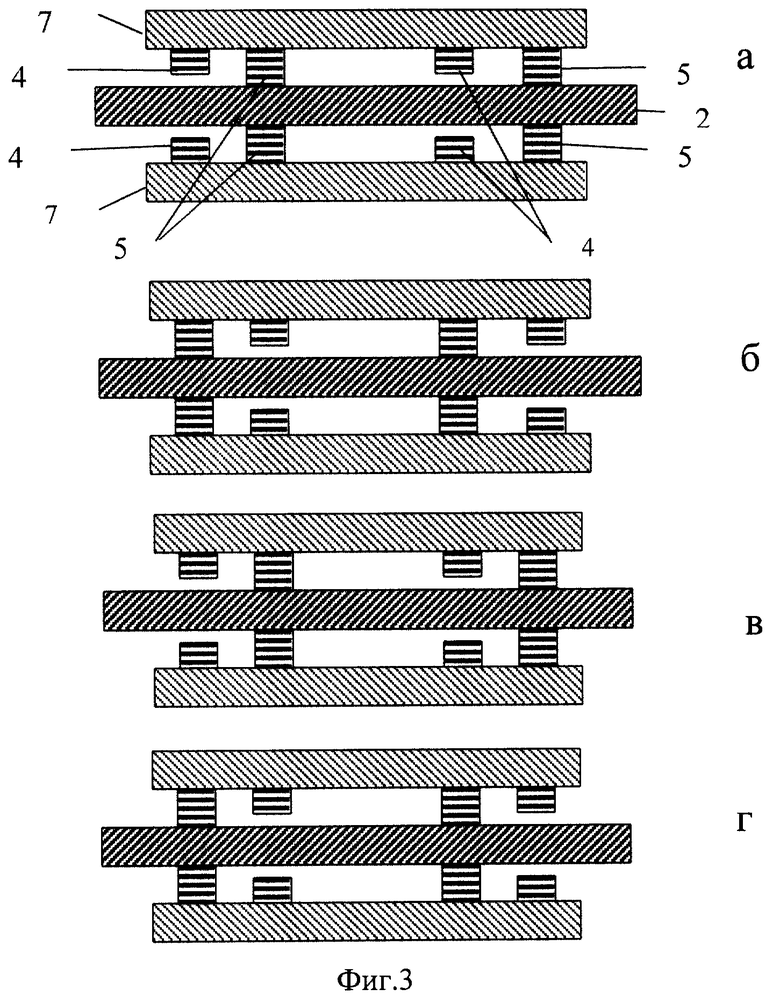
Сущность заявляемого пьезоэлектрического привода поясняется примером его реализации и чертежами. На фиг.1 схематично показан общий вид привода; фиг.2 - один из предпочтительных вариантов его реализации; на фиг.3 - такты работы одного из зажимов, показанных на фиг.2.
В наиболее общем случае пьезоэлектрический привод содержит корпус с неподвижным основанием 1, на котором размещено перемещаемое тело, выполненное в виде многогранника (например, параллелепипеда, трехгранной или шестигранной призмы и т.п.). Привод снабжен средством 3 для приложения усилия вдоль перемещаемого тела, которое может быть выполнено из числа известных, например, в виде магнитострикционного или электрострикционного элементов, в виде пружины или известного механизма (например, червячной или винтовой пары) или как в прототипе и условно обозначен на чертеже стрелкой. Зажим выполнен в виде пары пьезоэлементов 4 и пары пьезоэлементов 5, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима 6 тела к ним. Средство прижима может быть выполнено, например, в виде пружины. В частных случаях средством прижима может служить сила тяжести (при достаточной массе перемещаемого тела). Пьезоэлементы подключены к источнику напряжения (на чертеже не показано) известным образом, выбираемым из числа известных и обеспечивающим требуемый алгоритм работы.
В общем случае пьезоэлектрический привод работает следующим образом.
В первоначальный момент на пьезоэлементы 4 и 5 напряжение не подано и они совместно с устройством 6 обеспечивают фиксацию перемещаемого тела 2 относительно корпуса 1. Затем к телу 2 прикладывается усилие со стороны устройства 3, а на пару пьезоэлементов 4 подается напряжение, обеспечивающее их укорачивание, а следовательно, расфиксацию, а поскольку соседний пьезоэлемент своего размера не изменил, то тело в целом будет оставаться зафиксированным. В результате приложенного усилия участок тела 2 от левого торца до остающегося в положении фиксации одного из пьезоэлементов 5 подвергается упругой деформации сжатия. Затем пьезоэлементы 4 переводятся в положение фиксации путем снятия с них напряжения и перемещаемое тело фиксируется в таком частично деформируемом состоянии.
После этого напряжение подается на пьезоэлементы 5, они сжимаются (укорачиваются) и участок перемещаемого тела 2, расположенный между пьезоэлементами 4 и ближайшим к нему пьезоэлементом 5, подвергшийся до этого деформации, слегка релаксирует, но теперь этот деформированный участок будет расположен между пьезоэлементами 4. В следующий момент, когда пьезоэлементы 4 расфиксируются, а пьезоэлементы 5 зафиксируются, волна деформации дойдет до крайнего правого элемента 5, а в момент его расфиксации дойдет до правого торца смещаемого тела, в результате чего правый торец тела 2 смещается на некоторое расстояние. Затем с пьезоэлементов 5 снимается напряжение и они возвращаются в положение фиксации. После этого циклы "фиксация - расфиксация" для пар пьезоэлементов 4 и 5 повторяются, что обеспечивается подачей на них переменного напряжения в противофазе, в результате чего работа элементов 4 и 5 напоминает шагание на месте ("перетаптывание").
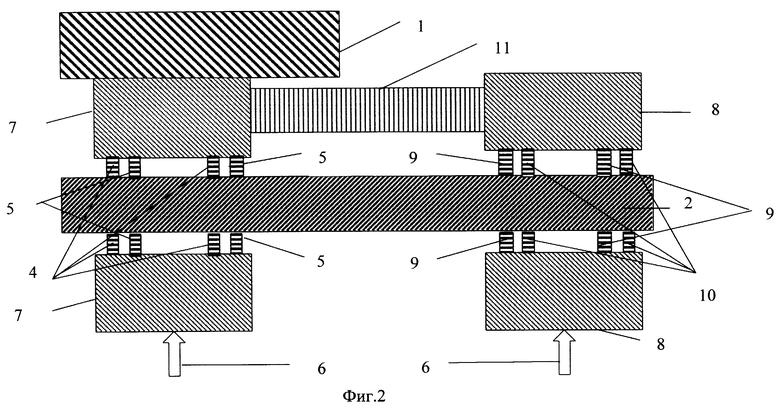
В предпочтительном варианте реализации пьезоэлектрический привод содержит корпус с неподвижным основанием 1, в котором размещено перемещаемое тело 2, выполненное в виде параллелепипеда из любого известного конструкционного материала. С основанием жестко соединен первый зажим 7 с двумя парами пьезоэлементов 4 и 5, взаимодействующих с двумя поверхностями перемещаемого тела. Привод снабжен вторым зажимом 8, аналогичным первому с двумя парами пьезоэлементов 9 и 10. Зажимы соединены между собой через пьезоэлектрический элемент 11, обеспечивающий возвратно-поступательное перемещение одного из зажимов относительно продольной оси перемещаемого тела. В зависимости от типа используемых пьезоэлементов и конструктивных особенностей зажимов пьезоэлемент 11 может быть изготовлен в виде одного или нескольких. Пьезоэлементы зажимов, находящиеся по одну из сторон перемещаемого тела, поджаты к нему упругими элементами 6 (на чертеже схематично показаны в виде стрелок), которые могут быть выбраны из числа известных, например в виде спиральных пружин. Пара зажимов 7 и 8, соединенная пьезоэлементом 11, обеспечивает создание усилия, прикладываемого вдоль продольной оси перемещаемого тела. Привод снабжен источником напряжения (на чертеже не показан), выбираемым из числа известных, обеспечивающим требуемый алгоритм работы, и соответствующим блоком управления, который может быть выполнен, например, в виде микропроцессора с соответствующим программным обеспечением, и усилителей напряжения.
Привод работает следующим образом. Каждый из зажимов 7 и 8 может находиться в двух состояниях - в состоянии фиксации и в состоянии расфиксации. В состоянии фиксации движение перемещаемого тела в области контакта с ним пьезоэлементов зажима отсутствует, а в состоянии расфиксации может происходить смещение перемещаемого тела и зажима относительно друг друга.
Когда отдельно взятый зажим 7 или 8 работает в режиме "перетаптывания", то по сути находится в режиме расфиксации, потому что перемещаемое тело может перемещаться под воздействием приложенного вдоль его продольной оси усилия. А усилие создается следующим образом. В начальный момент времени все пьезоэлементы 9, 10 находятся в удлиненном состоянии (т.е. фиксируют перемещаемое тело 2), а пьезоэлемент 11 находится в укороченном состоянии. Сначала на пьезоэлементе 11 изменяется подаваемое на него напряжение, приводящее к его удлинению, в результате чего возникает усилие вдоль продольной оси перемещаемого тела, направленное вправо (фиг.2).
Зажим 7 в это время находится в режиме расфиксации ("перетаптывания"), и тело 2 будет смещаться вправо в течение времени пока на пары пьезоэлементов 4 и 5 будет попеременно, в противофазе, подаваться или сниматься напряжение. Это перемещение можно остановить в любой момент времени до завершения полного удлинения элемента 11 или дождаться его окончания. После этого зажим 7 переводят в режим фиксации, а зажим 8 - в режим расфиксации ("перетаптывания") и подают на элемент 11 напряжение, приводящее к его укорачиванию, т.е. к возврату в исходное положение. После этого зажим 8 переводят в режим фиксации и цикл может быть повторен.
Если необходимо смещать тело 2 влево, то фиксацию и расфиксацию зажимов 7 и 8 производят в обратной последовательности, а на элемент 11 подают напряжение, приводящее к его укорачиванию.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2150169C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2159976C2 |
| ГРАДИЕНТНЫЙ КОНЦЕНТРАТОР | 1999 |
|
RU2162257C1 |
| БИОЦИДНЫЙ РАСТВОР И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2007 |
|
RU2333773C1 |
| БАКТЕРИЦИДНЫЙ РАСТВОР И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2007 |
|
RU2341291C1 |
| ИСКУССТВЕННЫЙ ХРУСТАЛИК ГЛАЗА И ФОТОХРОМНОЕ СТЕКЛО | 1996 |
|
RU2113190C1 |
| СПОСОБ ПОЛУЧЕНИЯ И СОСТАВ СМАЗОЧНОЙ КОМПОЗИЦИИ ДЛЯ ФОРМИРОВАНИЯ ПРОТИВОИЗНОСНЫХ И АНТИФРИКЦИОННЫХ СВОЙСТВ ПРИПОВЕРХНОСТНЫХ СЛОЕВ ТРУЩИХСЯ ДЕТАЛЕЙ | 2007 |
|
RU2351640C2 |
| ШИРОКОДИАПАЗОННАЯ МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА ДИАГНОСТИКИ | 2001 |
|
RU2191375C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА УСТАЛОСТЬ УЗЛА РАМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2188406C1 |
| СТАБИЛИЗАТОР ДАВЛЕНИЯ | 2003 |
|
RU2241169C1 |
Привод предназначен для микропозиционирования объектов и микрозондов в приборостроении, а также в прецизионном станкостроении. Привод содержит перемещаемое тело, выполненное в виде многогранника, средство для приложения к нему усилия вдоль его продольной оси, взаимодействующий с ним зажим с пьезоэлементом и источник напряжения, подключенный к нему; при этом зажим выполнен в виде, по крайней мере, двух пар пьезоэлементов, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима тела к ним, а источник напряжения выполнен с возможностью управления пьезоэлементами то постоянным, то переменным напряжением с подачей последнего на соседние элементы в противофазе. Изобретение обеспечивает упрощение технологии изготовления. 3 ил.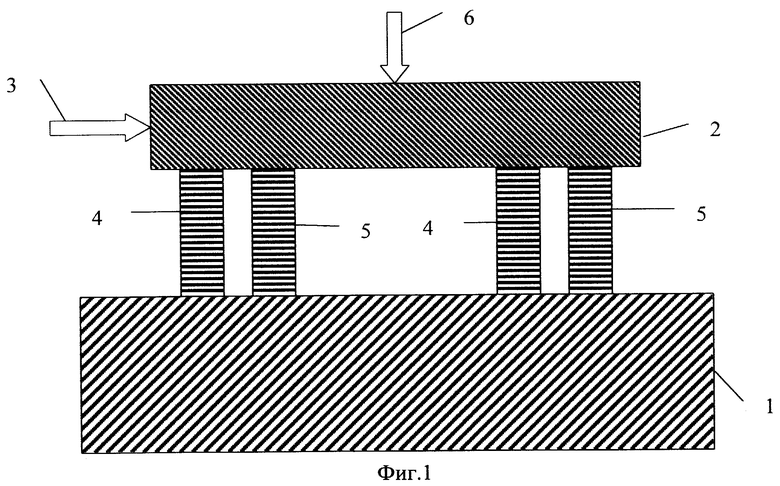
Прецизионный пьезоэлектрический привод, содержащий перемещаемое тело, выполненное в виде многогранника, средство для приложения к нему усилия вдоль его продольной оси, взаимодействующий с ним зажим с пьезоэлементом и источник напряжения, подключенный к нему, отличающийся тем, что зажим выполнен в виде по крайней мере двух пар пьезоэлементов, взаимодействующих с одной из поверхностей перемещаемого тела, и средства прижима тела к ним, а источник напряжения выполнен с возможностью управления пьезоэлементами то постоянным, то переменным напряжением с подачей последнего на соседние элементы в противофазе.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |

