Изобретение относится к средствам связи, в частности к способу облегчения переноса связи в сети беспроводной связи.
В системах связи, которые передают информацию в кадрах, таких как система связи с временным уплотнением (ВУ), системы множественного доступа с временным уплотнением каналов (МДВУ), система множественного доступа с кодовым уплотнением каналов (МДКУ), в частности в цифровых сотовых системах, может применяться перенос связи с участием абонента, для реализации которого необходимо, чтобы подвижный абонентский аппарат измерял силу сигналов ближайших соседних ячеек. В некоторых системах, например, в глобальной системе подвижной связи (GSM), соответствующей стандарту ETSI - GSM Европейского института стандартов в области телекоммуникаций, помимо измерения силы сигналов необходима принудительная идентификация соседней ячейки, которую определяют посредством декодирования периодически передаваемого идентифицирующего кода базовой станции (ИКБС). В этих системах абоненту обычно выделяется определенное время для измерения и декодирования опознавательных кодов соседних ячеек.
Несмотря на то, что протокол системы GSM предусматривает возможность осуществления таких измерений, процесс принудительной идентификации ИКБС всех соседних ячеек в системах с переносом связи, который производится с участием абонента, может занимать значительное время. Это время может быть особенно продолжительным в системе, в которой используется синхронизация между ячейками для уменьшения времени прерывания сигнала тональной частоты во время переноса связи. Синхронизация вызывает задержку в измерениях ИКБС соседних ячеек. Аналогично, в микросотовой системе эта задержка создает существенную проблему, так как движение через ячейку может происходить очень быстро и поэтому требуется более быстрый захват данных измерения.
В начале вызова или когда видимость соседних ячеек радикально изменяется (т.е. когда подвижное средство связи поворачивает за угол в микросотовой системе) может понадобиться одновременная проверка множества соседних ячеек. По мере того, как сигнал обслуживающей станции быстро пропадает, измеряемый сигнал новых ячеек может быстро возрастать до рабочего уровня. В традиционной системе с повторным использованием 7 ячеек время, необходимое для измерения ИКБС полного набора из шести потенциальных кандидатов на перенос связи, в шесть раз превышает время для измерения одного кандидата. Эта проблема усугубляется, если перечень соседних ячеек, которые необходимо периодически декодировать, еще больше.
Точность данных декодирования позволяет принимать быстрые и точные решения о переносе связи. Если подвижный объект не способен быстро декодировать опознавательные коды новых ячеек, то существует возможность, что вызов в течение длительного периода времени будет иметь плохое качество или даже будет прерван. Например, если подвижный объект поворачивает за угол в микросотовой системе связи, сигнал контролируемой ячейки может быстро пропасть, в то время как сигнал новой ячейки будет быстро нарастать до рабочего уровня. Аналогично, подвижный объект может декодировать опознавательный код определенной ячейки прежде, чем он повернет за угол. После поворота подвижного объекта за угол сигнал пользователя, повторно использующего тот же самый канал в заранее декодированной ячейке, может внезапно стать очень сильным. Без частого повторения декодирования существует вероятность, что для переноса связи будет выбрана эта заранее декодированная ячейка, несмотря даже на то, что она была пригодной только до того, как подвижный объект повернул за угол.
Поэтому существует потребность в способе и устройстве, позволяющих минимизировать время переноса связи в системе связи, предусматривающей формирование кадров для передачи информации.
В дальнейшем изобретение поясняется описанием примеров его воплощения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает вид сверху сети беспроводной связи, в которой реализовано изобретение,
фиг. 2 - структурную схему абонентского аппарата по фиг.1, в котором реализовано изобретение,
фиг. 3 - схему распределения кадров, иллюстрирующую информацию на управляющем канале и канале трафика в системе МДВУ,
фиг.4 - алгоритм, поясняющий операцию переноса связи, осуществляемую абонентским аппаратом, изображенным на фиг.2,
фиг.5 - алгоритм, более подробно поясняющий предложенный способ переноса связи, осуществляемый абонентским аппаратом,
фиг. 6 - алгоритм, иллюстрирующий альтернативный способ переноса связи согласно изобретению, и
фиг. 7 - алгоритм, иллюстрирующий этапы проверки силы сигнала соседних ячеек на этапах 408, 523 и 621 по фиг.4, 5 и 6, соответственно, согласно изобретению.
Предложенные способ и устройство позволяют улучшить скорость и надежность декодирования базовых станций соседних ячеек благодаря ускорению процесса декодирования, если качество сигнала на канале трафика находится в заданных пределах, например, не выше или не ниже установленного порога. Соседние управляющие каналы контролируются и декодируются с большой скоростью за счет игнорирования информации на канале трафика. Информацией на канале трафика может быть речевой трафик, такой как данные в многокадровой системе связи. Несмотря на то, что описание в дальнейшем будет посвящено в основном речевому сигналу, оно в равной мере относится и к данным. Речевой сигнал прерывается и канальная информация декодируется, например, когда коэффициент ошибок в битах или коэффициент ошибок в кадрах на канале трафика (КТ) ухудшается, в то время как другой канал имеет лучший сигнал. Подвижный объект может также прервать речевой сигнал и немедленно декодировать сигналы, если сигнал обслуживающей ячейки резко ухудшился, а сигнал соседней ячейки при этом быстро улучшается, Если обнаружено ухудшение условий, начинается ускоренный процесс, чтобы повысить вероятность получения необходимой информации для переноса связи в пригодную целевую ячейку - кандидат. Планирование прерываний на речевом канале может также происходить, если в начале вызова или сразу после переноса связи нет достаточной информации о соседней ячейке. Согласно другому аспекту изобретения подвижный объект может определить, когда речевой сигнал сильный, чтобы прервать трафик и получить идентифицирующие данные или произвести дополнительные измерения. Потерянный речевой сигнал может быть восстановлен с помощью обычных методов экстраполяции речевого сигнала.
На фиг. 1 изображена сеть 100 беспроводной связи. Сеть 100 беспроводной связи предпочтительно включает в себя коммутационную станцию 102 подвижной связи, множество ячеек 104, на каждой из которой имеется базовая станция 105, связанная с контроллерами 106 ячеек. И, наконец, подвижные устройства 108 связи или портативные устройства 110 связи (в целом именуемые как "подвижные объекты") выполнены с возможностью осуществления связи с базовыми станциями, связанными с базовыми контроллерами 106, для ведения связи с другим подвижным объектом или устройством проводной связи, связанным с наземной сетью.
На фиг.2 показана структурная схема подвижного объекта, такого как сотовый радиотелефон или другое устройство беспроводной связи, предназначенного для реализации предложенного способа. В предпочтительном варианте специализированная интегральная схема (СИС) 201, такая как специализированная интегральная схема с КМОП-структурой, выпускаемая компанией Моторола, Инк., и управляющая схема 203, которая может содержать микропроцессор, например, микропроцессор марки 68НС11, также выпускаемый компанией Моторола, Инк., вместе формируют необходимый протокол связи для работы в системе связи. В управляющей схеме 203 используются ОЗУ 205, ЭППЗУ 207 и ПЗУ 209, в предпочтительном варианте скомпонованные в одном блоке 211, для выполнения операций, необходимых для формирования протокола и выполнения других функций, таких как запись на дисплей 213, прием информации с клавиатуры 215 и управление синтезатором 225 частот. Специализированная интегральная схема 201 обрабатывает сигнал тональной частоты, преобразованный схемами 219 обработки тональных сигналов, поступающих из микрофона 217 и на громкоговоритель 221. Передатчик 223 осуществляет передачу через антенну 229 с использованием несущих частот, выработанных синтезатором 225 частот. Информация, принятая антенной 229 подвижного объекта, поступает на приемник 227, который демодулирует символы, содержащие кадр с сообщением, используя несущие частоты от синтезатора 225 частот. Подвижный объект может факультативно содержать приемное и запоминающее устройство для сообщений, включающее средство для цифровой обработки данных. В качестве приемного и запоминающего устройства для сообщений может, например, использоваться цифровой автоответчик или приемник поисковых вызовов. Несмотря на то, что схемы на фиг.2 иллюстрируют примерный вариант подвижного объекта, в рамках данного изобретения могут быть использованы и другие схемы.
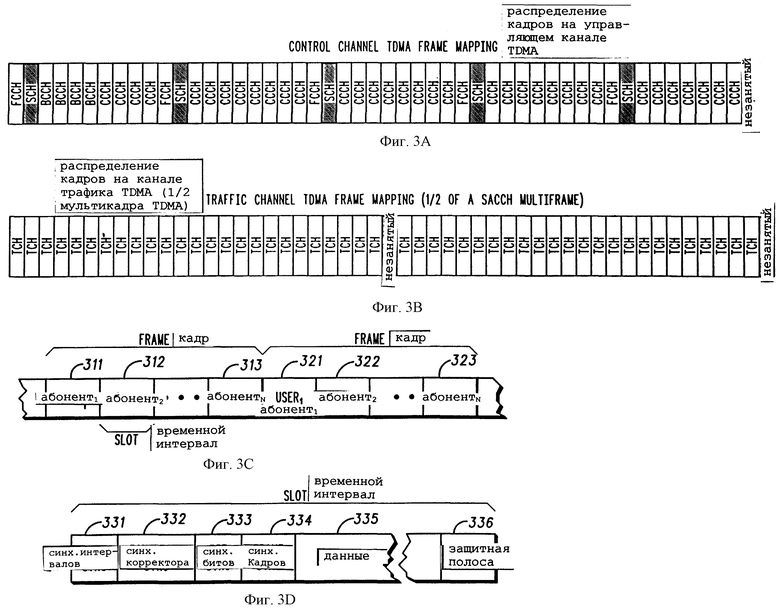
На фиг.3 показаны примерные варианты кадров, передаваемых на управляющем канале и канале трафика. Кадры управляющих каналов, показанные на фиг.3А, подразделяются на кадры широковещательных управляющих каналов (ШВУК), кадры общих управляющих каналов (ОУК) и кадры свободных каналов (СК). Каналы трафика, изображенные на фиг.3В, включают в себя кадры каналов трафика (КТ) и незанятые кадры. На фиг.3С проиллюстрированы два типичных КТ - кадра, имеющих N временных интервалов для обслуживания N пользователей. В системе GSM, например, используются 8 временных интервалов для обслуживания восьми пользователей. Типичный временной интервал для абонента 2 изображен на фиг.3D. Каждый временной интервал предпочтительно включает в себя синхросигнал 331 временных интервалов, синхросигнал 332 корректора, синхросигнал 333 битов, синхросигнал 334 кадров, информационный временной интервал 335 и защитную полосу 336.
В системе GSM, например, используется 104 логических МДВУ-кадра, образующих КТ в SACCH-мультикадре, содержащем 26 кадровых мультикадров. Управляющий канал содержит дважды по 51 кадровому мультикадру (или всего 102 кадра) для каждого SACCH-мультикадра. Поскольку управляющий канал имеет 102 кадра в отличие от 104 кадров на канале трафика, логические кадры управляющего канала повторяются быстрее и "отстают" по времени от логических КТ-кадров на канале трафика. Первые два МДВУ-кадра на управляющем канале начинаются до того, как закончится SACCH-мультикадр. В 102 кадрах управляющего канала СК-кадр (содержащий ИКБС) повторяется через каждые десять кадров. Незанятый кадр в конце является 51-м кадром. Когда незанятый КТ-кадр синхронизируется с одним из СК-кадров, можно декодировать опознавательный код ячейки. В традиционных сотовых системах связи, таких как сотовая система стандарта GSM, после принятия решения декодировать опознавательный код ячейки может потребоваться от 11 до 26 мультикадров или 11х120 мсек (т.е. 1,32 сек) для синхронизации кадров,
В начале вызова или при радикальном изменении уровня сигналов от обслуживающей ячейки может потребоваться одновременно проверить уровень сигналов от множества соседних ячеек. При традиционной схеме с 7-ю повторно используемыми ячейками время на измерение ИКБС для каждой из шести соседних ячеек, которые являются потенциальными кандидатами на перенос связи, возрастает приблизительно до 8 сек, при условии, что нет ошибок в декодировании. Если же необходимо периодически декодировать большое количество соседних ячеек, входящих в перечень, как в микросотовой среде, время на измерение ячеек, являющихся потенциальными кандидатами на перенос связи, еще более увеличивается. Необходимо также периодически декодировать не самые сильные ячейки на тот случай, если они станут одной из более сильных измеренных ячеек.
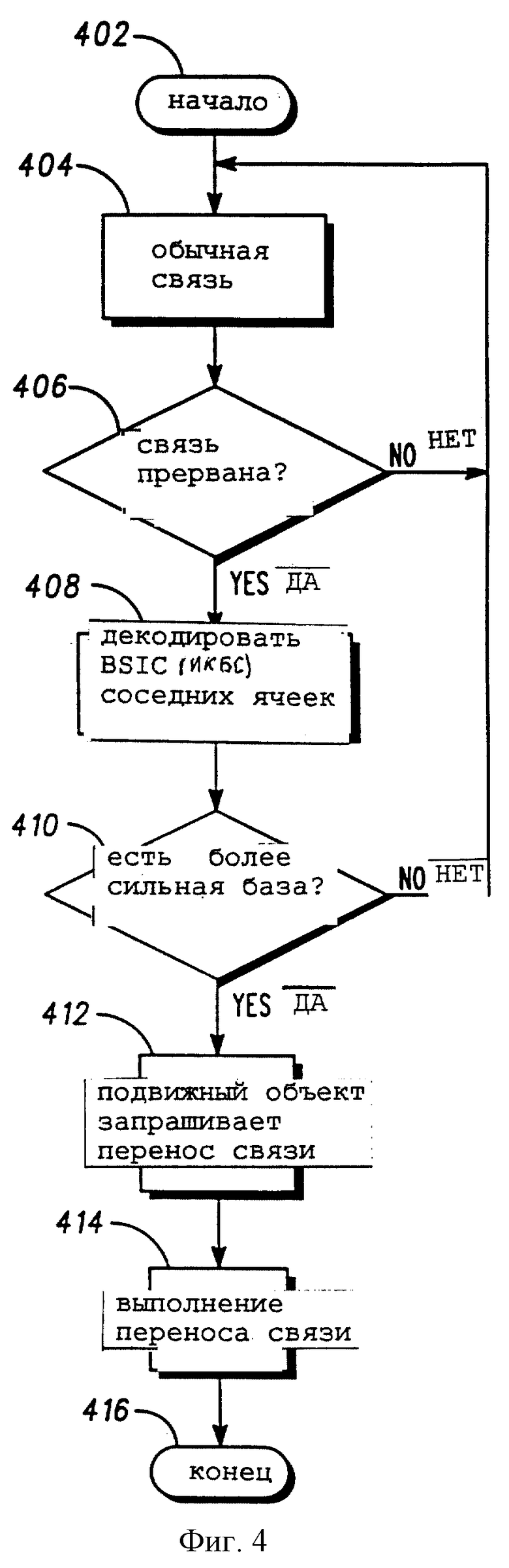
На фиг.4 представлен алгоритм, поясняющий способ осуществления переноса связи согласно изобретению. На этапе 404, когда между подвижным объектом и системой радиосвязи осуществляется обычная связь, подвижный объект определяет на этапе 406, не прервана ли связь. Связь может быть прервана, например, если коэффициент ошибок в битах или коэффициент ошибок в кадрах, вычисленный управляющей схемой 203, превышает некоторое определенное значение. Если связь прервана, подвижный объект прерывает речевой сигнал, чтобы декодировать ИКБС соседних ячеек на этапе 408. Затем, на этапе 410, подвижный объект или обслуживающая базовая станция (вместе с сотовой сетью) определяет, доступна ли более сильная база. Как будет описано более подробно со ссылками на остальные чертежи, подвижный объект может определить наличие более сильной базовой станции посредством ведения перечня силы сигналов от новых базовых станций. Альтернативно, базовая станция может посылать сигнал на подвижный объект, информирующий его о более сильной базовой станции. Если имеется более сильная базовая станция, на этапе 414 подвижный объект посылает сообщение в сеть с запросом на перенос связи. Затем, на этапе 414, выполняется перенос связи, хорошо известный в данной области.
На фиг. 5 представлен алгоритм, который более подробно поясняет способ запроса переноса связи, осуществляемый подвижным объектом согласно изобретению. Во время обычной инициализации связи на выделенном канале трафика на этапе 502 управляющая схема 203 подвижного объекта принимает от сети перечень частот управляющих каналов, обычно именуемый как распределение широковещательных управляющих каналов (РК), приемником 227 на этапе 504, чтобы контролировать потенциальных кандидатов на перенос связи. В ходе осуществления обычной связи на этапе 506 управляющая схема измеряет или определяет уровень сигналов РК-частот и на этапе 508 сортирует РК-сигналы по уровню от самого сильного до самого слабого. Затем на этапе 510 подвижный объект ожидает, пока либо КТР-кадр, либо незанятый кадр канала трафика не синхронизируется с требуемым СК-кадром управляющего канала. Если подвижный объект функционирует некоторое время в данной системе и уже сканировал базовую станцию, он может прогнозировать, когда КТ-кадр или незанятый кадр канала трафика синхронизируется с СК-кадром управляющего канала.
Затем на этапе 512 управляющая схема подвижного объекта определяет, синхронизирован ли незанятый кадр канала трафика с СК-кадром (имеющим опознавательный код ячейки) на управляющем канале. Если незанятый кадр канала трафика синхронизирован с СК-кадром управляющего канала, управляющая схема подвижного объекта декодирует ИКБС на этапе 514 и в случае необходимости пересортировывает перечень силы РК-сигналов на этапе 516 на основании декодирования ИКБС. Но если кадры не синхронизированы и требуется декодирование сильной РК-частоты, подвижный объект определяет на этапе 518, синхронизирован ли КТ-кадр канала трафика с требуемым СК-кадром управляющего канала. Если КТ-кадр и требуемый СК-кадр управляющего канала не синхронизированы, на этапе 510 подвижный объект ожидает следующей кадровой синхронизации КТ-кадра канала трафика или незанятого кадра канала трафика с требуемым СК-кадром управляющего канала, в зависимости от того, какой из них придет первым. Поскольку КТ-кадры на канале трафика повторяются в 24-25 раз чаще, чем незанятые кадры, СК-кадр управляющего канала обеспечивает целый ряд дополнительных возможностей для кадровой синхронизации.
Если КТ-кадр канала трафика синхронизирован с требуемым СК-кадром на этапе 518, управляющая схема подвижного объекта определяет на этапе 520, прервана ли связь, посредством контролирования коэффициента ошибок в битах или кадрах в сигнале, принятом приемником 227. Если связь не прервана, на этапе 522 управляющая схема определяет, был ли текущий канал трафика выделен недавно в результате нового вызова, или приема, или недавнего переноса связи. Если на этапе 520 определено, что связь прервана, или на этапе 522 определено, что инициализирован новый вызов, или произошел недавний перенос связи, подвижный объект прерывает речевой сигнал на этапе 524. В частности, управляющая схема игнорирует данные, которые были бы приняты в информационном интервале 335, выделенном данному подвижному объекту, и настраивает приемник на контролирование управляющего канала. Затем управляющая схема пытается декодировать ИКБС, переданный на управляющем канале, на этапе 526. Подвижный объект сообщает измерения частоты любого управляющего канала, находящегося в РК, в сеть связи при условии, что опознавательный код этой соседней ячейки был недавно декодирован подвижным объектом. Подвижный объект предпочтительно декодирует ИКБС ячейки, имеющей самый сильный сигнал (или по некоторым другим критериям) для повышения вероятности, что ячейка декодированного ИКБС будет иметь самый сильный сигнал и будет выбрана для переноса связи. В случае необходимости на этапе 528 управляющая схема пересортирует перечень РК по силе сигналов. Подвижный объект или обслуживающая базовая станция определяет, какая из измеренных и декодированных соседних ячеек является наиболее сильной и на этапе 530 вместе с сотовой сетью определяет, доступна ли данная идентифицированная самая сильная ячейка. Если более сильной базы нет, подвижный объект продолжает обычную связь на том же самом канале. Но если есть более сильная база, на этапе 532 подвижный объект посылает запрос, чтобы ему разрешили перенос связи на этапе 534. Затем подвижный объект предпочтительно восстанавливает потерянный речевой сигнал на этапе 536. При этом на этапе 536 для восстановления потерянного речевого сигнала выполняется цифровая интерполяция речевого сигнала, которая известна специалистам, например, из работы "Конструирование и тестирование спектрально-эффективных наземных систем подвижной связи с помощью речевого LPC-сигнала", Michael McLaughlin, Donald Linder and Scott Carney, I.E.E.E. Journal On Selected Areas in Communications, vol. SAC-2, No. 4, июль 1984 года, или из патента США 4868981 на изобретение "Система заполнения прерванного тонального сигнала для снижения шума и улучшения разборчивости речи при применениях в многоканальном сканирующем приемнике", авторы John D. Ide, John P. Fussel, Aaron S. Rogers.
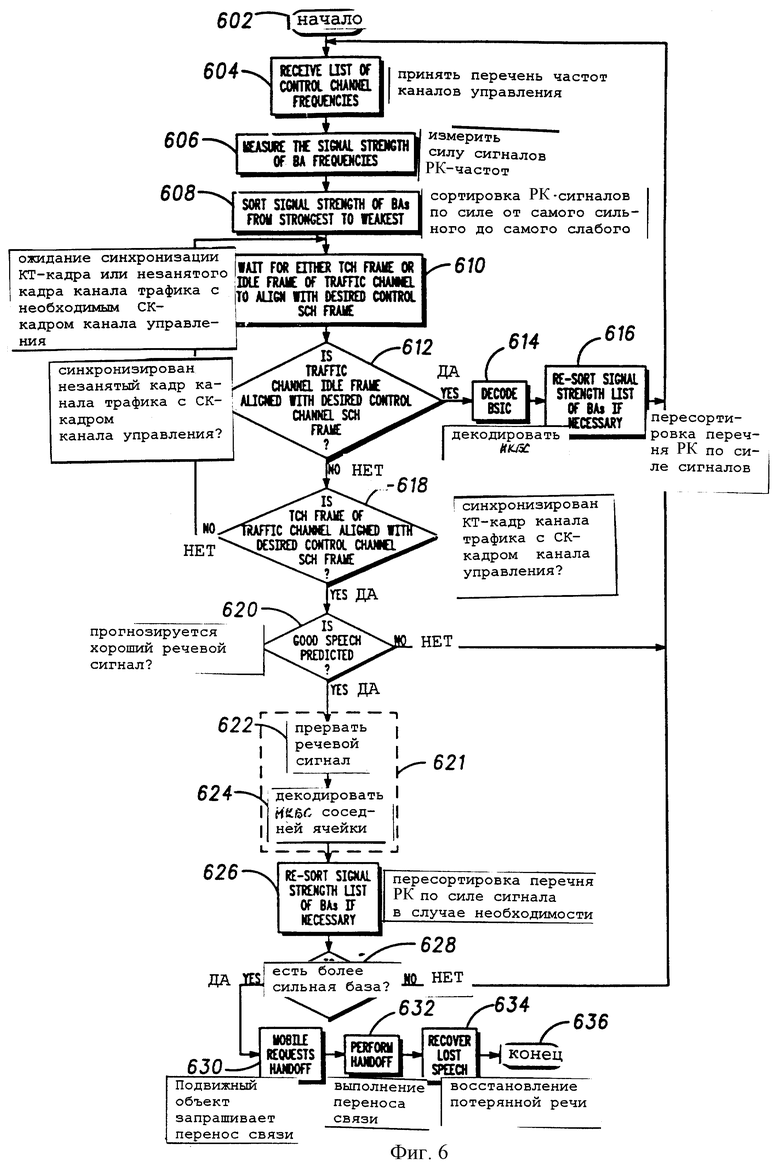
На фиг. 6 представлен алгоритм, иллюстрирующий способ осуществления переноса связи согласно альтернативному варианту изобретения. Во время обычной инициализации связи на выделенном канале трафика на этапе 602 подвижный объект принимает перечень частот управляющих каналов на этапе 604 для контролирования их как потенциальных кандидатов на перенос связи. При обычной связи управляющая схема определяет силу сигналов на РК-частотах на этапе 606 и сортирует эти сигналы по силе от самого сильного до самого слабого на этапе 608. Затем подвижный объект ожидает, когда либо КТ-кадр, либо незанятый кадр на канале трафика синхронизируется с требуемым СК-кадром на этапе 610.
Затем на этапе 612 управляющая схема определяет, синхронизирован ли незанятый кадр канала трафика с СК-кадром управляющего канала. Если незанятый кадр канала трафика синхронизирован с СК-кадром управляющего канала, подвижный объект декодирует ИКБС на этапе 614. В случае необходимости на этапе 616 подвижный объект пересортировывает перечень РК-сигналов по силе на основании декодирования ИКБС. Но если эти кадры не синхронизированы и необходимо декодирование сильной РК-частоты, на этапе 618 подвижный объект определяет синхронизирован ли КТ-кадр канала трафика с требуемым СК-кадром управляющего канала. Если КТ-кадр и СК-кадр не синхронизированы, на этапе 610 подвижный объект ожидает следующую кадровую синхронизацию КТ-кадра или незанятого кадра на канале трафика с требуемым СК-кадром управляющего канала в зависимости от того, какой из них придет первым.
Если КТ-кадр канала трафика синхронизирован с требуемым СК-кадром на этапе 618, подвижный объект на этапе 620 определяет, прогнозируется ли хороший речевой сигнал. Хороший речевой сигнал может быть прогнозирован посредством контролирования коэффициента ошибок в битах, коэффициента ошибок в кадрах или некоторых других критериев для определения качества сигнала. Если прогнозируется хороший речевой сигнал, управляющая схема прерывает речевой сигнал на этапе 622. Затем на этапе 624 управляющая схема пытается декодировать опознавательный код ячейки, содержащийся в управляющем канале. Подвижный объект будет сообщать измерения частот любого управляющего канала, входящего в РК, в сеть при условии, что оно недавно декодировало опознавательный код этой соседней ячейки. В случае необходимости на этапе 626 управляющая схема произведет пересортировку перечня РК на основании силы сигнала. Подвижный объект или обслуживающая станция определяет, какая из измеренных и декодированных соседних ячеек является самой сильной, и вместе с сотовой сетью определяет на этапе 630, доступна ли эта идентифицированная самая сильная ячейка. Если она доступна, подвижный объект запрашивает перенос связи на этапе 632, и сеть выполняет перенос связи на этапе 634. Благодаря тому, что качество речевого сигнала хорошее, подвижный объект восстанавливает потерянный речевой сигнал по традиционной технологии на этапе 620. Несмотря на то, что варианты реализации изобретения показаны в виде отдельных алгоритмов на фиг.5 и 6, согласно изобретению они могут осуществляться одновременно.
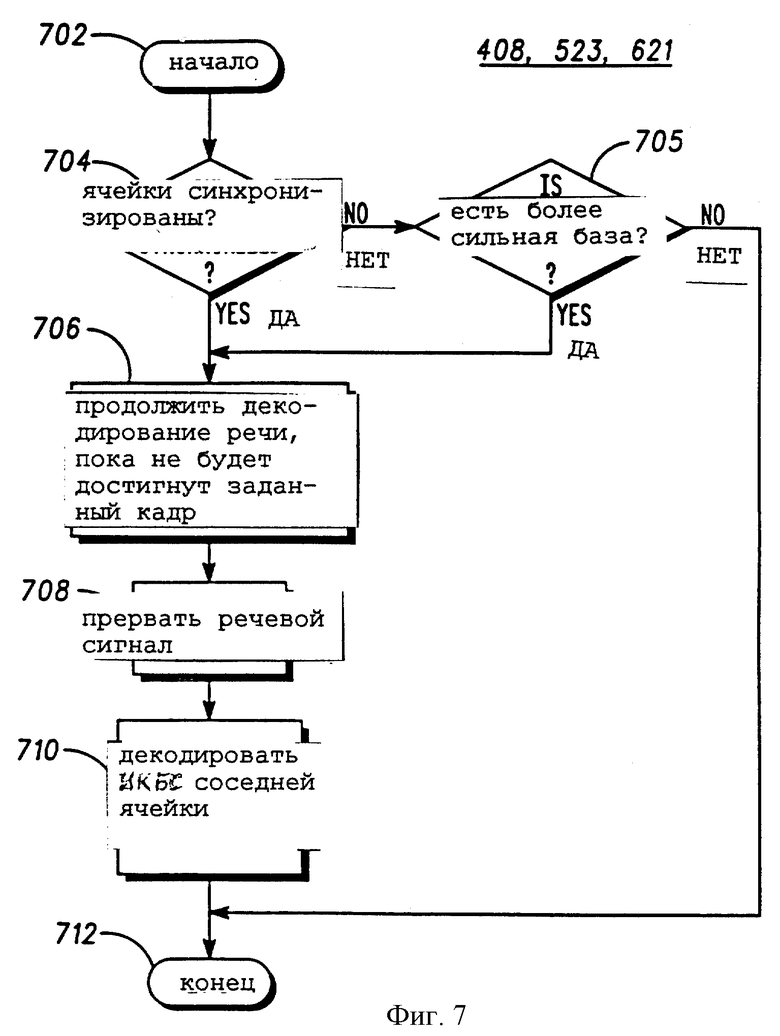
На фиг.7 проиллюстрирован предложенный способ проверки силы сигналов соседних ячеек. Подвижный объект сначала определяет на этапе 704, синхронизированы ли ячейки. Если ячейки синхронизированы, подвижный объект может интеллектуально прервать речевой сигнал, если ему известно, что СК-кадр управляющего канала может быть декодирован. Если ячейки не синхронизированы, управляющая схема подвижного объекта на этапе 705 определяет, известна ли предшествующая синхронизация кадров. Предшествующую синхронизацию кадров можно обнаружить во время предыдущего сканирования базовой станции и также использовать для задержки прерывания речевого сигнала, чтобы декодировать опознавательные коды соседних ячеек. Если ячейки синхронизированы или известна предшествующая синхронизация кадров, управляющая схема продолжает декодирование до тех пор, пока на этапе 706 не будет достигнут заранее определенный кадр, имеющий опознавательный код ячейки. Когда кадр с опознавательным кодом ячейки достигнут, управляющая схема прерывает речевой сигнал на этапе 708 и контролирует управляющий канал для передачи ИКБС. Посредством прерывания речевого сигнала, когда будет обнаружен СК-кадр, подвижный объект минимизирует потерю речи. И, наконец, на этапе 710 подвижный объект декодирует ИКБС соседней ячейки, когда незанятый кадр синхронизирован с СК-кадром.
Вышеприведенное описание изобретения может быть рассмотрено только для примера и для специалиста в данной области техники представляется очевидным возможность внесения многочисленных изменений и модификаций, не выходя за рамки изобретательского замысла и объема изобретения. Например, система GSM описана только в целях примера и предложенные способ и устройство могут применяться в подвижных средствах и системах ВУ и МДВУ или другом устройстве, или системе, которые производят декодирование кадров информации. Хотя изобретение описано для конкретного применения в портативных сотовых радиотелефонах, оно может быть также применено в любом средстве беспроводной связи, включая пейджеры, электронные органайзеры или компьютеры. Изобретение ограничено только прилагаемой формулой изобретения.


Способ позволяет повысить скорость и надежность декодирования базовых станций соседних ячеек благодаря ускорению процесса декодирования, если качество сигнала на канале трафика находится в заданных пределах, что является техническим результатом. В частности, соседние управляющие каналы контролируются и декодируются с большой скоростью за счет игнорирования информации на канале речевого трафика. Речевой сигнал прерывается и информация на канале декодируется, когда, например, коэффициент ошибок в битах или коэффициент ошибок в кадрах на канале трафика (КТ) ухудшается, в то время как другой канал имеет лучший сигнал. Планирование прерываний речевого канала может также происходить, если в начале вызова или сразу после переноса связи нет достаточной информации о соседней ячейке, потерянный речевой сигнал может быть восстановлен с помощью обычных методов экстраполяции речевого сигнала. 9 з.п. ф-лы, 7 ил.
| US 53833221 A, 17.01.1995 | |||
| Способ радиосвязи с подвижными объектами | 1988 |
|
SU1596468A1 |
| Стенд для проверки углов сходимости колес автомобилей | 1968 |
|
SU530165A1 |
| Огнетушитель | 0 |
|
SU91A1 |

