Изобретение относится к радиолокационной технике, а именно к системам с активным ответом.
Известны [1] радиолокационные ответчики, содержащие последовательно соединенные приемопередающую антенну 1, развязывающий блок 2, приемник 3, декодер 4 и передатчик 5, выход которого подключен к второму входу развязывающего блока 2.
Недостатком такого ответчика является сравнительно высокая нестабильность времени задержки ответного сигнала относительно запросного, которая обусловлена в основном нестабильностью времени задержки в цепях приемника и передатчика и согласно [2] может достигать 0,1 мкс, что приводит к ошибке измерения дальности ΔD= 15 м и недопустимо, например, в системах измерения промаха, причаливания и т.п.
Целью предлагаемого изобретения является уменьшение нестабильности времени задержки ответчика.
Поставленная цель достигается тем, что в устройство, содержащее передатчик, последовательно соединенные приемопередающую антенну, развязывающий блок, приемник и декодер введены pin-выключатель, элементы И и ИЛИ, последовательно соединенные блок управляемой задержки, счетчик числа рециркуляции, дешифратор, последовательно соединенные синхронизатор и временной дискриминатор, вход передатчика подключен к выходу элемента ИЛИ, а выход - к входу pin-выключателя, второй вход которого подключен к второму выходу синхронизатора, а выход - к второму входу развязывающего блока, первый вход блока управляемой задержки подключен к выходу декодера, второй вход к выходу элемента И, входы которого соединены с вторым выходом синхронизатора и выходом приемника, входы элемента ИЛИ подключены к третьему выходу синхронизатора и выходу блока управляемой задержки, второй вход временного дискриминатора подключен к выходу дешифратора, а выход - к второму входу блока управляемой задержки, а второй вход счетчика числа рециркуляции соединен с третьим выходом синхронизатора.
Входом и выходом устройства является приемопередащая антенна. Сущность предлагаемого изобретения состоит в том, что вновь вводимые блоки образуют цепь автоматического регулирования, обеспечивающую постоянную задержку ответного сигнала относительно запросных импульсов.
Сравнение заявляемого устройства с прототипом показывает наличие вновь вводимых блоков: элементов И и ИЛИ, блока управляемой задержки, счетчика числа рециркуляций, дешифратора, синхронизатора, временного дискриминатора, pin-выключателя.
Введение подобных блоков для повышения стабильности времени задержки сигнала в ответчике из общедоступных источников неизвестно, что позволяет сделать вывод о соответствии предлагаемого решения критерию "Новизна".
Вновь вводимые блоки описаны в известной литературе [3...7]. Однако их включение в соответствии с вышеуказанными связями дает возможность стабилизировать время задержки сигнала в ответчике, что позволяет повысить точность измерения дальности.
Такое решение явным образом не следует из уровня техники, что соответствует критерию "Изобретательский уровень". Устройство может быть использовано в высокоточных системах измерения дальности, например в системах внешнетраекторных измерений промаха, применяемых при отработке ракетных комплексов.
На фиг. 1 приведена функциональная схема прототипа, на фиг.2 - функциональная схема заявляемого устройства, а на фиг.3 - эпюры, поясняющие ее работу в режиме автоматической подстройки времени задержки, на фиг.4 - эпюры напряжений в рабочем режиме.
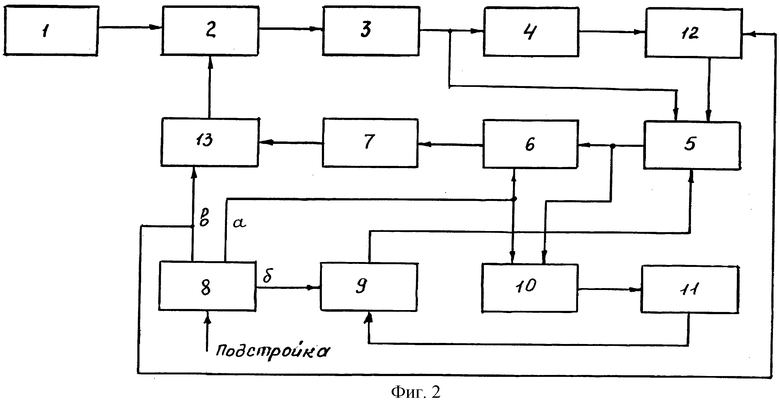
Устройство содержит последовательно соединенные антенну 1, развязывающий блок 2, приемник 3, декодер 4, блок управляемой задержки 5, элемент ИЛИ 6, передатчик 7, pin-выключатель 13, выход которого подключен к второму входу развязывающего блока 2, последовательно соединенные синхронизатор 8 и временной дискриминатор 9, выход которого подключен к второму входу блока управляемой задержки, последовательно соединенные счетчик числа рециркуляции 10 и дешифратор 11, выход которого подключен к второму входу временного дискриминатора 9, а также элемент И 12, входы которого подключены к выходам приемника 4 и второму выходу синхронизатора 8, а выход синхронизатора подключен к входу pin-выключателя 13.
Устройство имеет два режима работы: режим автоматической подстройки времени задержки, осуществляемый перед рабочим режимом по внешней команде, и рабочий режим ответа на запросные кодовые сигналы.
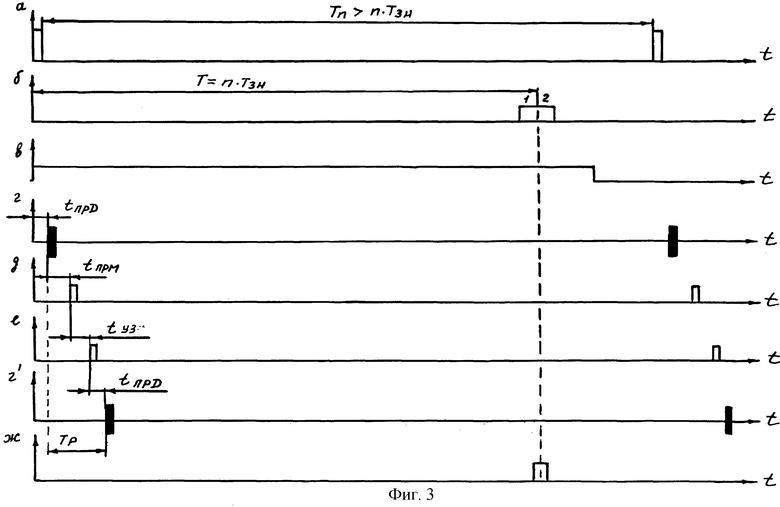
В режиме автоматической подстройки времени задержки устройство работает следующим образом. По команде "Подстройка" синхронизатор 8 формирует импульсы "а", "б" и "в". Импульсы "а" следуют с периодом
Т>n•Tзн,
где n - число рециркуляций;
Тзн - номинальное время задержки в цепях ответчика.
Импульсы "б" задержаны относительно импульсов "а" на время Т=n•Тзн. Нестабильность ΔТ времени Т мала  Длительность импульса "в"
Длительность импульса "в"
Тв=Т+ΔТ•n,
где ΔТ - возможное изменение времени задержки в цепях ответчика.
Импульсы "в" поступают на рin-выключатель 13, увеличивая его затухание, чтобы обеспечить поступление на вход приемника 3 СВЧ колебаний передатчика 7, имеющих уровень сигнала, близкий к уровню запросного, импульс "в" поступает также на элемент И 12, открывая его.
Импульсы "а" приводят в нулевое состояние триггеры счетчика 10 и через элемент ИЛИ 6 запускают передатчик 7, формирующий импульсы "г", задержанные относительно импульсов "а" на время t прд и имеющие частоту f0. Эти сигналы усиливаются приемником, который может быть прямого усиления, содержащим малошумящий усилитель, детектор и видеоусилитель, либо супергетеродинного типа, при этом частота колебаний гетеродина выбирается из условия
где f3 - чаcтота запросных сигналов. При выборе частоты усилителя промежуточной частоты
такой приемник обеспечивает прохождение частот f3 и f0. Импульсы "г" усиливаются приемником 3, преобразуются в видеоимпульсы "д", задержанные относительно импульсов "г" на время tпрм и поступающие через открытый элемент И на второй запускающий вход блока управляемой задержки 5, формирующей импульс "е", задержанный относительно импульса "д" на время tуз, поступающий на счетный вход счетчика 10 и поступающий через элемент ИЛИ 6 на запуск передатчика 7, колебания которого снова поступают на вход приемника, продолжая процесс рециркуляции в течение n периодов, определяемых счетчиком 10. Очевидно, что процесс рециркуляции идет с периодом
Тр=t3прд+t3прм+tуз.
Если Тр соответствует расчетному, то возникающий через n периодов рециркуляции на выходе дешифратора 11 импульс "ж" будет совпадать по времени с центром двух полустробов "б" и управляющий сигнал на выходе временного дискриминатора 9 будет отсутствовать, и задержка, создаваемая блоком управляемой задержки 5, изменяться не будет. Если же задержка, вносимая приемником 3 или передатчиком 7 уменьшится, то период Тр уменьшится и импульс "ж" будет совпадать с первым полустробом импульса "б", на выходе временного дискриминатора 9 появится сигнал, под действием которого увеличится задержка, вносимая блоком управляемой задержки 5, что приведет к увеличению Тp до тех пор, пока импульс "ж" не будет совпадать с центром полустробов.
Если же задержки, вносимые передатчиком 7 или приемником 3 увеличатся, то на выходе временного дискриминатора 9 возникает сигнал, под действием которого задержка, вносимая блоком управляемой задержки 5, уменьшится до тех пор, пока импульс "ж" не будет совпадать с центром полустробов.
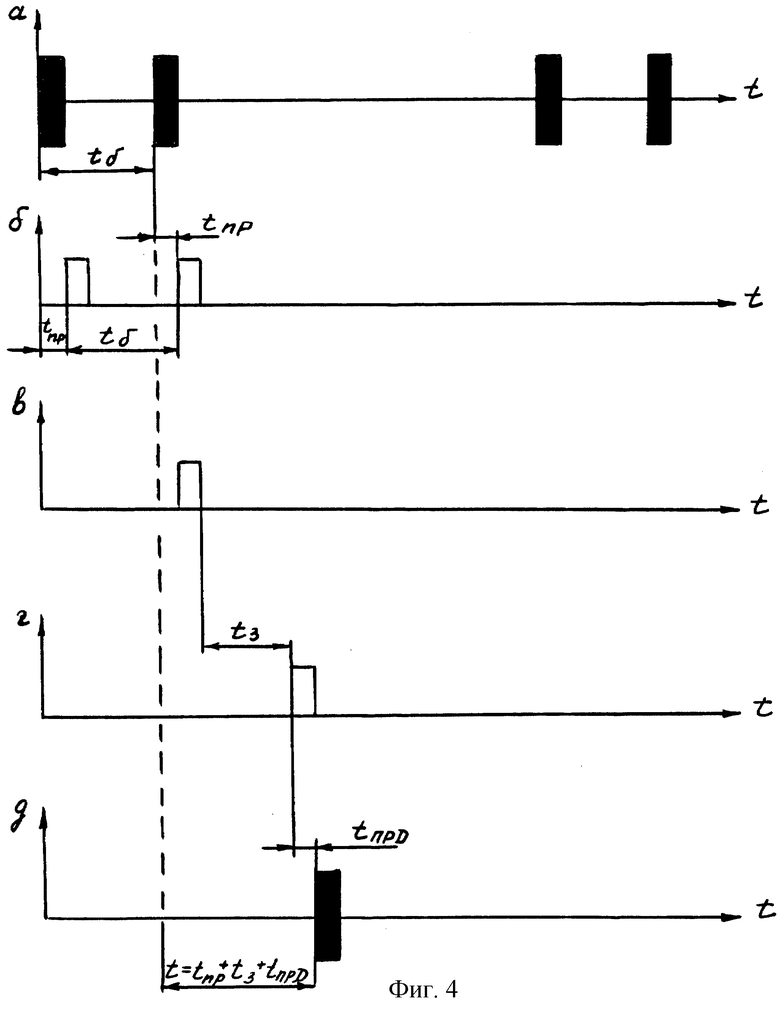
Аналогичное регулирование произойдет, если изменится tуз. Использование рециркуляции позволяет выявить и компенсировать незначительные уходы временных задержек. Если, например, задержка, вносимая приемником, изменилась на 1 нс, что соответствует погрешности измерения дальности 15 см, то при числе рециркуляций n=1024 изменение положения импульса "ж" составит 1 мкс, что может быть легко обнаружено как аналоговым, так и цифровым временным дискриминаторами. В рабочем режиме синхронизатор выключен, элемент И закрыт, затухание, вносимое pin-выключателем 13, мало. Запросные сигналы "а" (фиг. 4), как и в прототипе, принимаются антенной 1 и через развязывающий блок 2 поступают на приемник 3, усиливаются им и подаются на вход декодера 4. Если база принятых сигналов tб соответствует базе настройки декодера 4, то на его выходе возникает импульс "в", запускающий блок управляемой задержки, формирующий импульс "г", задержанный относительно импульса "в" на время t3 и запускающий передатчик 7, колебания "д" которого подводятся через рin-выключатель 13 и развязывающий блок 2 к антенне 1 и излучаются.
Как следует из фиг. 4, сигнал ответчика задержан относительно второго запросного импульса, поступившего на вход приемника на время
t=tпр+tуз +tпрд,
которое известно с большой точностью и может быть учтено при обработке информации в запросчике.
Преимуществом заявляемого устройства по сравнению с прототипом является большая стабильность времени ответного сигнала, что позволяет использовать его в высокоточных системах измерения, например в системах для измерения промаха, автоматической швартовки судов и т.п.
Устройство может быть реализовано. Элементы И и ИЛИ описаны в [3,4], управляемые линии задержки (временные модуляторы) и временные дискриминаторы - в [6] , синхронизаторы и счетчики числа рециркуляций - в [5], pin-выключатели - в [7].
Вновь вводимые блоки могут быть выполнены на полупроводниковых приборах и интегральных схемах и имеют незначительную массу и малое потребление, что не приведет к значительному увеличению массы ответчика.
Источники информации
1. Финкельштейн М.И. Основы радиолокации. - М.: Радио и cвязь, 1983.
2. Изделие 24Г-К. Технические условия ГУ1.000.054 ТУ.
3. Соботка 3., Старн Я. Микропроцессорные системы. Энергоиздат, 1981.
4. У.Титце, К.Шенк. Полупроводниковая схемотехника. Мир, 1982.
5. Проектирование импульсных цифровых радиотехнических устройств. Под ред. Ю.Н.Казаринова. - М.: Высшая школа, 1985.
6. Поиск, обнаружение и измерение параметров в радионавигационных системах. Под ред. Ю.М.Казаринова. - М.: Советское радио, 1975.
7. Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и cвязь, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1990 |
|
RU1773191C |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 1994 |
|
RU2096805C1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2037846C1 |
| САМОЛЕТНЫЙ ОТВЕТЧИК | 2007 |
|
RU2338221C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1995 |
|
RU2095821C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |
| РАДИОДАТЧИК ВЫСОТЫ | 2007 |
|
RU2336540C1 |
| Система индивидуального радиовызова | 1992 |
|
SU1838881A3 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
Изобретение относится к радиолокационной технике, к системам с активным ответом. Радиолокационный ответчик содержит передатчик (7), последовательно соединенные приемопередающую антенну (1), развязывающий блок (2), приемник (3) и декодер (4). Введены pin-выключатель (13), элемент И (12), элемент ИЛИ (6), последовательно соединенные блок управляемой задержки (5), счетчик числа рециркуляций (10) и дешифратор (11), последовательно соединенные синхронизатор (8) и временной дискриминатор (9). Технический результат - повышение стабильности времени задержки ответного сигнала, благодаря режиму автоматической подстройки времени задержки. 4 ил.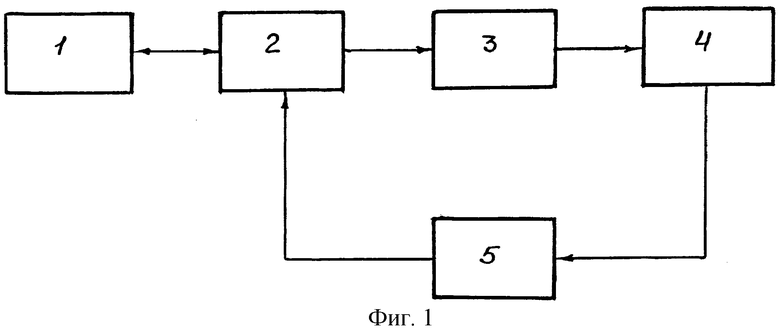
Радиолокационный ответчик, содержащий передатчик, последовательно соединенные приемопередающую антенну, развязывающий блок, приемник и декодер, отличающийся тем, что введены pin-выключатель, элемент И, элемент ИЛИ, последовательно соединенные блок управляемой задержки, счетчик числа рециркуляций и дешифратор, последовательно соединенные синхронизатор и временной дискриминатор, вход передатчика подключен к выходу элемента ИЛИ, а выход - к входу pin-выключателя, второй вход которого подключен к второму выходу синхронизатора, а выход к второму входу развязывающего блока, первый вход блока управляемой задержки подключен к выходу декодера, второй вход к выходу элемента И, входы которого соединены с вторым выходом синхронизатора и выходом приемника, входы элемента ИЛИ подключены к третьему выходу синхронизатора и выходу блока управляемой задержки, второй вход временного дискриминатора подключен к выходу дешифратора, а выход - к третьему входу блока управляемой задержки, а второй вход счетчика рециркуляции соединен с третьим выходом синхронизатора.
| ДАВЫДОВ П.С | |||
| и др | |||
| Авиационная радиолокация | |||
| Справочник | |||
| - М.: Транспорт, 1984, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| RU 94020849 А1, 10.08.1996 | |||
| SU 1729215 А1, 10.02.1996 | |||
| US 5438332 А, 01.08.1995 | |||
| ЕР 0223961 А1, 24.09.1986. | |||

