Изобретение относится к области ракетостроения и может быть использовано в авиационной, химической и других отраслях промышленности.
Известно устройство для присоединения наземных коммуникаций (патент РФ 2143629, F 16 L 37/28), содержащее корпус, толкатель с клапаном, маховик в виде гайки с шариковым фиксатором. Недостатком этого устройства является конструктивная сложность и недостаточное удобство в эксплуатации при работе с газами высокого давления.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для подсоединения коммуникаций (патент США 4137937, F 16 К 31/44), содержащее корпус, в котором расположен толкатель, на конце которого закреплен маховик.
Недостатком указанного быстроразъемного соединения является конструктивная сложность, большая масса.
Техническим результатом предлагаемого изобретения является устранение указанных недостатков, обеспечение дополнительных функциональных возможностей путем двухстороннего ограничения вращательного момента, прикладываемого к устройству, особенно при работах в открытом космосе.
Сущность изобретения заключается в том, что в устройстве для подсоединения коммуникаций, включающем корпус, в котором расположен толкатель, маховик, причем маховик состоит из ступицы и обода с фиксирующим пазом, в котором размещен шарик, одна из стенок фиксирующего паза обода выполнена в виде разносторонней трапеции, а другая выполнена ассиметрично первой, при этом угол между меньшим основанием трапеции и горизонтальной осью шарика превышает угол между большим основанием и указанной осью, общим ребром трапеции является их короткая боковая сторона, а шарик установлен внутри прямоугольного паза ступицы с возможностью продольного перемещения вдоль оси быстроразъемного соединения.
Рабочие поверхности фиксирующего паза обода образуют систему сил, которая позволяет осуществлять продольное перемещение шарика в прямоугольном пазу ступицы, что обеспечивает двухстороннее регулирование усилия страгивания толкателя в предельных положениях.
Сущность изобретения поясняется чертежами.
Фиг.1. Общий вид устройства подсоединения коммуникаций.
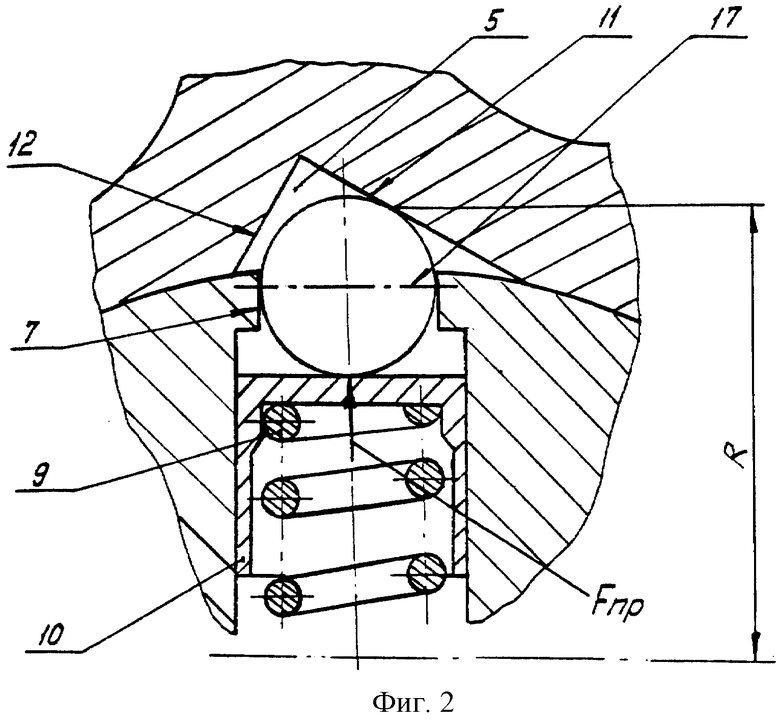
Фиг.2. Сечение А-А фиг.1.
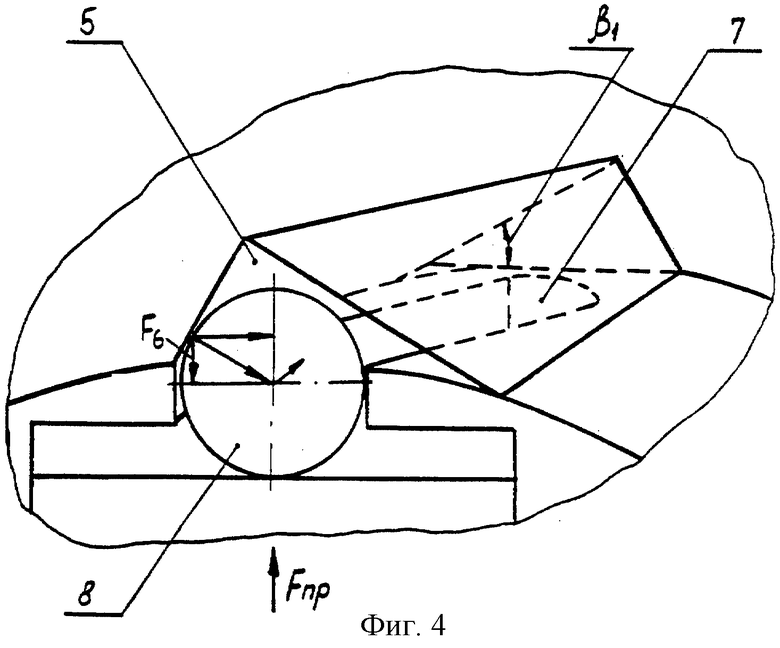
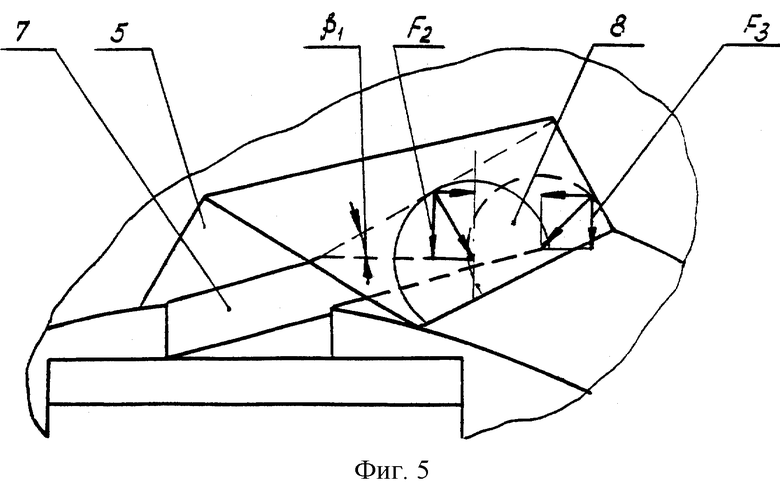
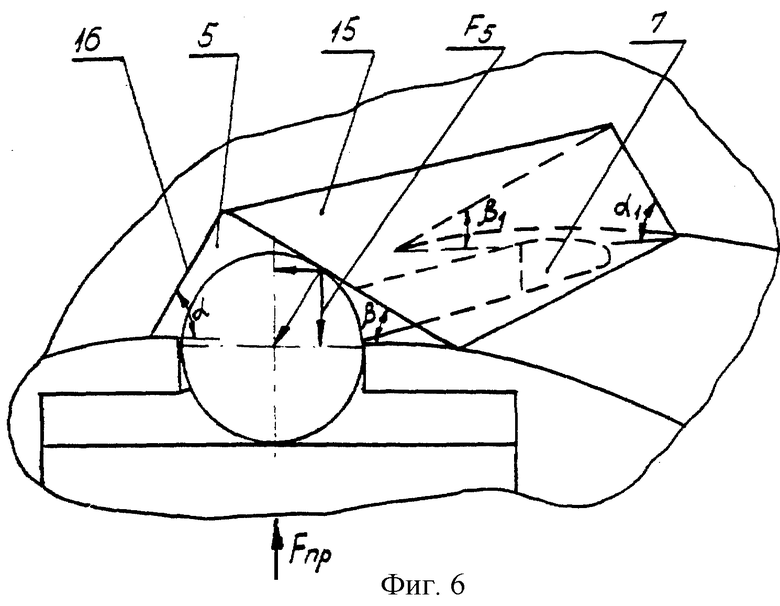
Фиг.4, 5, 6. Узел фиг.2 в изометрическом изображении при крайних положениях шарика.
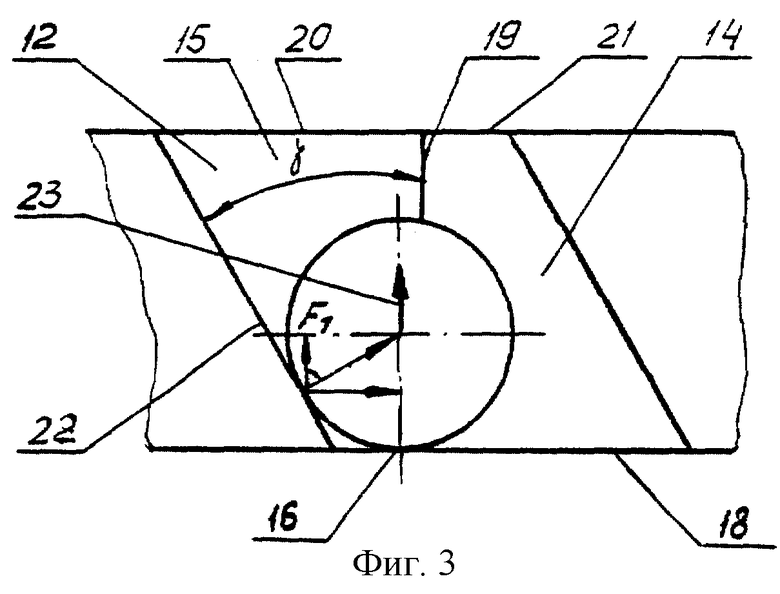
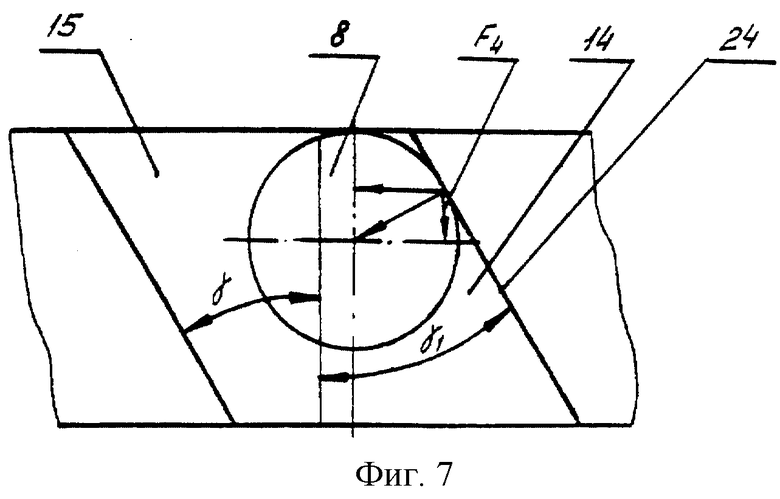
Фиг.3, 7. Развертки фиксирующего паза обода при крайних положениях шарика.
Устройство подсоединения коммуникаций состоит из корпуса 1, в котором размещен толкатель 2, приводимый в движение винтовой парой 3 маховиком.
Маховик состоит из обода 4, имеющего фиксирующий паз 5 и ступицы 6, имеющей прямоугольный паз 7, в котором размещен механизм, выполненный в виде шарика 8, подпружиненного пружиной 9 через втулку 10 к стенкам 11 и 12, фиксирующего паза 5 обода 4.
Поджатие пружины 9 осуществляется гайкой 13.
Стенки 11 и 12 фиксирующего паза 5 выполнены в виде разносторонних трапеций 14 и 15. Трапеция 14 асимметрична трапеции 15. Угол α, образованный меньшим основанием 16 трапеции 15 и горизонтальной осью 17 шарика 8, превышает угол β, образованный большим основанием 18 трапеции 14 и горизонтальной осью 17. Общим ребром трапеций 14 и 15 является их короткая боковая сторона 19.
Большее основание 20 трапеции 15 и горизонтальная ось 17 шарика 8 образует угол β1, равный углу β, а меньшее основание 21 трапеции 14 и горизонтальная ось 17 шарика 8 образует угол α1, равный углу α. Линия 22 касания шарика 8 стенки 12 трапеции 15 и ось прямоугольного паза 7 образуют угол γ, а линия 24 касания шарика 8 стенки 11 трапеции 14 и ось 23 образуют угол γ1, равный углу γ.
Устройство для присоединения коммуникаций (см. фиг.1) работает следующим образом. Для обеспечения заправки или слива компонентов корпус 1 при помощи накидной гайки 25 присоединяют к зарядному штуцеру 26 изделия. При вращении маховика космонавтом по часовой стрелке шарик 8 из-за наличия угла γ, создающего перекатывающее усилие F1 (см. фиг.3), скользит по стенке 12 трапеции 15 и занимает крайнее настроечное положение, то есть приходит в зону угла β1 настройки (см. фиг.4, 5). При дальнейшем вращении маховика за счет винтовой пары 3 толкатель 2 перемещается вдоль оси быстроразъемного соединения до упора в клапан 27. При дальнейшем вращении маховика клапан 27 зарядного штуцера 26 переместится до упора в седло 28 штуцера 26, создав в герметизирующей зоне необходимое контактное усилие, определяемое из условия обеспечения прочности и герметичности стыка и регламентированное усилием настройки пружины 9. Шарик 8 под действием силы F2 (см. фиг.5) преодолеет настроечное усилие Fпp пружины 9 и углубится внутрь прямоугольного паза 7 ступицы 6 и обод 4 будет проворачиваться относительно ступицы 6 при моменте на ободе, равном M1 = Fпр•R•tgβ1.
Это говорит о том, что клапан 27 штуцера 26 сел на седло 28 с заданным усилием и можно производить заправку баков космического аппарата компонентами.
После завершения заправки космонавт поворачивает маховик против часовой стрелки, при этом паз 5 обода 4 своей стенкой 11 трапеции 14 меньшим основанием 26 повернется к шарику 8. Шарик 8 под действием силы F3 (см. фиг.4) будет стремиться преодолеть усилие Fпp настройки пружины 9. Проскальзывание обода 4 относительно ступицы 6 в этом случае может произойти при моменте на ободе 4, равном M2 = Fпр•R•tgα1.
Поскольку угол α1 больше угла β1, то и M2>M1, что обеспечивает больший страгивающий момент на обратном ходе. Одновременно с этим из-за наличия угла γ1 (см. фиг.7) возникает усилие F4, которое перемещает шарик 8 по прямоугольному пазу 7 в другое крайнее положение, в зону угла β (см. фиг.6) настройки, то есть обод 4 своей трапециеидальной поверхностью 14 большим основанием 18 повернулся к шарику 8. При дальнейшем вращении обода 4 против часовой стрелки за счет винтовой пары 3 толкатель 2 будет перемещаться до посадки клапана 27 на седло 29 корпуса 26, при дальнейшем вращении торец 30 винторой пары 3 сядет на торец гайки 31. Шарик 8 под действием силы F5 будет стремиться преодолеть усилие пружины 9.
Проскальзывание обода 4 относительно ступицы 6 будет происходить при моменте на ободе, равном M3 = Fпр•R•tgβ.
Это говорит о том, что торец 30 винтовой пары 3 сел на упор в торец гайки 31 с усилием, определяемым усилием настройки пружины 9.
При дальнейшей работе с устройством для подсоединения коммуникаций при вращении обода 4 по часовой стрелке меньшая сторона 16 трапеции 15 подойдет к шарику 8. Шарик 8 под действием силы F6 будет стремиться преодолеть усилие настройки пружины 9. Проскальзывание обода 4 относительно ступицы 6 и в этом случае будет происходить при моменте на ободе, равном M4 = Fпр•R•tgα.
Поскольку угол α больше угла β, то и момент М4 больше момента М3. Это обеспечивает больший страгивающий момент на прямом ходе. Одновременно с этим из-за наличия угла γ шарик 8 перекатится в зону угла β1 настройки и далее цикл работы устройства для подсоединения коммуникаций повторяется.
Таким образом, выполнение в маховике фиксирующего паза указанной сложно-пространственной формы, обеспечивающего различные усилия прощелкивания маховика при расположении шарика в дискретных местах по длине паза, обеспечивает требуемые тарированные моменты вращения маховика и усилия перемещения толкателя как в сторону открытия, так и в сторону закрытия клапана. И, следовательно, маховик обеспечивает простоту эксплуатации с двухсторонним тарированным приложением момента к устройству для подсоединения коммуникаций и борту космического корабля или космического аппарата, что особенно важно при работах в открытом космосе.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОРАЗЪЕМНОЕ ТРУБНОЕ СОЕДИНЕНИЕ | 2000 |
|
RU2187739C1 |
| БЫСТРОРАЗЪЕМНЫЙ АГРЕГАТ | 2002 |
|
RU2214551C1 |
| БЫСТРОРАЗЪЕМНЫЙ АГРЕГАТ | 2002 |
|
RU2214552C1 |
| БЫСТРОРАЗЪЕМНЫЙ АГРЕГАТ | 2002 |
|
RU2216677C2 |
| БЫСТРОРАЗЪЕМНОЕ ЦАНГОВОЕ СОЕДИНЕНИЕ | 2001 |
|
RU2202726C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| УСТРОЙСТВО ДЛЯ ПРИСОЕДИНЕНИЯ КОММУНИКАЦИЙ | 1999 |
|
RU2173426C2 |
| БЫСТРОРАЗЪЕМНЫЙ АГРЕГАТ | 2002 |
|
RU2216678C2 |
| ПРОТЕЗ СУСТАВА | 2000 |
|
RU2195901C2 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 2001 |
|
RU2199031C2 |
Изобретение относится к области ракетостроения и может быть использовано в авиационной, химической и других отраслях промышленности. Устройство для подсоединения коммуникаций состоит из корпуса, в которой размещен толкатель, приводимый в движение маховиком через винтовую пару. Маховик состоит из обода, имеющего фиксирующий паз, и ступицы, имеющей прямоугольный паз, в котором размещен шарик, подпружиненный пружиной. Стенки фиксирующего паза выполнены в виде разносторонних трапеций. Трапеции асимметричны друг другу. Угол, образованный меньшим основанием трапеции и горизонтальной осью шарика, превышает угол, образованный большим основанием трапеции и горизонтальной осью. Общим ребром трапеции является их короткая боковая сторона. Выполнение в маховике фиксирующего паза указанной сложно-пространственной формы, обеспечивающего различные усилия прощелкивания маховика при расположении шарика в дискретных местах по длине паза, обеспечивает требуемые тарированные моменты вращения маховика и усилия перемещения толкателя как в сторону открытия, так и в сторону закрытия клапана. Маховик обеспечивает простоту эксплуатации с двухсторонним тарированным приложением момента к устройству для подсоединения коммуникаций к борту космического корабля или космического аппарата, что особенно важно при работах в открытом космосе. 7 ил.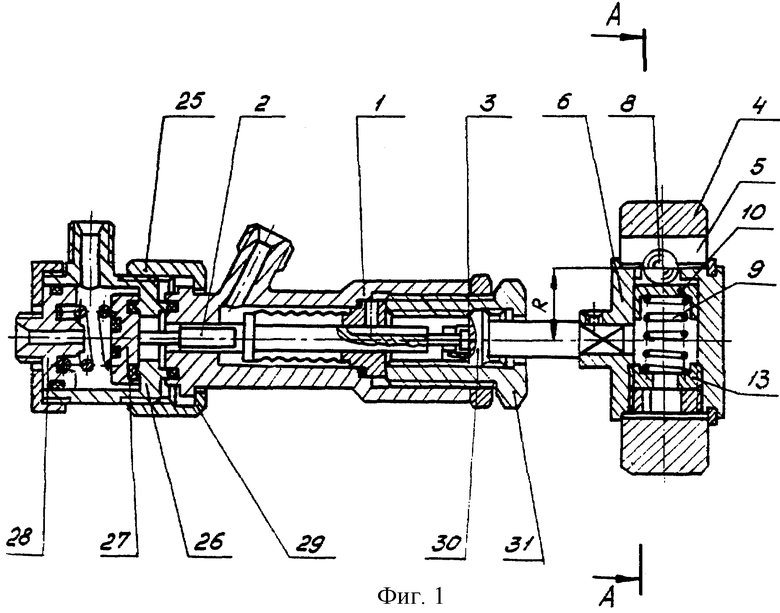
Устройство для подсоединения коммуникаций, содержащее корпус, в котором расположен толкатель, маховик, отличающееся тем, что маховик состоит из ступицы и обода с фиксирующим пазом, в котором размещен шарик, одна из стенок фиксирующего паза обода выполнена в виде разносторонней трапеции, а другая выполнена асимметрично первой, при этом угол между меньшим основанием трапеции и горизонтальной осью шарика превышает угол между большим основанием и указанной осью, общим ребром трапеций является их короткая боковая сторона, а шарик установлен внутри прямоугольного паза ступицы с возможностью продольного перемещения вдоль оси быстроразъемного соединения.
| US 4137937 A, 06.02.1979 | |||
| Винтовой запорный кран | 1973 |
|
SU457842A1 |
| ЗАПОРНЫЙ ВЕНТИЛЬ | 2000 |
|
RU2160861C1 |
| GB 1403460 A, 20.08.1975 | |||
| US 3910308 A, 07.10.1975. | |||

