Стыковочное устройство предназначено для космической техники, а более конкретно для образования/нарушения механической связи (стыковки/расстыковки) между двумя космическими объектами, например отсеком космической станции и полезным грузом, используя энергию от манипулятора и/или от космонавта. Другой областью применения могут быть подводные работы, сходные с космическими невесомостью операторов, использованием скафандров и манипуляторов, повышенными требованиями к безопасности и надежности операций.
Известно стыковочное устройство, состоящее из пассивной части, имеющей три штыря, и активной части, имеющей три конусообразных гнезда с установленными на каждом из них подпружиненными защелками и механизмами фиксации и отведения защелок (патент США 4431333, 1984 г., МПК B 25 G 3/18). Стыковочное устройство (СТУ) предназначено для стыковки к "Шаттлу" космического аппарата, оснащенного собственным реактивным двигателем, вектор тяги которого параллелен осям гнезд и лежит между ними. Недостатком являются большие габариты и масса вследствие того, что в одном аппарате фактически размещены три стыковочных устройства, содержащих каждое весь набор необходимых механизмов. По этой же причине сложность и стоимость почти утраиваются. Трудно также выдержать точное соответствие межосевых расстояний между гнездами на одном объекте межосевым расстояниям между штырями на другом объекте. Несовпадение же осей приводит к заклиниванию и к нестыковке.
Еще одним недостатком являются большие нагрузки на защелки из-за того, что выборка люфта осуществляется прижимом штырей к защелкам. Основным же недостатком указанного стыковочного устройства является неприспособленность к совместной работе как с космонавтом, так и с антропоморфным манипулятором. Человеку, особенно в скафандре и в невесомости, сложно одновременно совместить три гнезда с тремя штырями. Конструкция не обеспечивает приемлемый для космонавтов вариант: вначале совместить и защелкнуть один штырь при больших угловых промахах, только потом - остальные штыри (а еще лучше: одним штырем и ограничиться). Невозможна стыковка в случае, если линия действия сближающей объекты силы и/или проекция центра масс объекта на стыковочную плоскость расположены вне треугольного контура, ограниченного осями трех гнезд, в то время как для антропоморфных манипуляций на международной космической станции (МКС) как раз характерны несимметричность груза и необходимость захвата груза кистью сбоку от стыковочного устройства.
Известно стыковочное устройство космического манипулятора, состоящее из активной части, содержащей гнездо, выполненное в виде воронки, сопряженной в суженной части со стаканом, а в расширенной части с базовым кольцом, и механизм стягивания, включающий в себя k крюков, где k = 1, 2,..., и механизм перемещения крюков, и из пассивной части, выполненной в виде штыря, сужающегося от основания к головке и имеющего уступы с упорами для рогов крюков активной части, причем боковая поверхность головки охвачена стаканом, боковая поверхность основания охвачена базовым кольцом, а крюки установлены с возможностью выдвижения их рогов в направлении расширения воронки и втягивания в направлении сужения воронки от исходного положения, соответствующего положению рогов на упорах пассивной части в состыкованном состоянии, и соединены с выходными звеньями механизма привода крюков (патент США 4905938, 1990 г., МПК B 64 G 1/64), принятое за прототип.
Для стыковки активной и пассивной частей прототипа необходимо перед относительно простой операцией - стягиванием крюками - выполнить значительно более сложное действие: насаживание гнезда на штырь до упора. Операция осуществляется посредством сложного движения манипулятора, обеспечивающего выравнивание по всем осям при начальном радиальном и угловом рассогласовании с одновременным сближением. Эта операция осуществима только в случае, если и манипулятор, и штырь жестко установлены на космической станции (КС), а манипулятор оснащен чувствительным силомоментным датчиком и сложной системой управления с обратной связью.
Основным недостатком прототипа является ограниченность области применения только автоматической стыковкой манипулятором при обязательности установки пассивной части СТУ и манипулятора на одной платформе. Затруднена или невозможна в условиях невесомости стыковка космонавтом вручную, особенно если сам космонавт предварительно не зафиксирован относительно КС. При монтаже на внешней поверхности КС груза, например, доставленного "Шаттлом" или другим транспортным кораблем, космонавту нельзя воспользоваться электроприводом для затяжки крюков, так как автономного электропитания на большинстве монтируемых объектов нет, а к бортовой сети космической станции подключение происходит не раньше стыковки. Средства для ручного привода крюков (рукоятки, ключи и т.п.) в прототипе не указаны. Но даже если бы такие средства были предусмотрены, космонавт прежде чем воспользоваться ими должен выполнить несколько неудобных, негарантированных и непрогнозируемых по количеству попыток и по продолжительности операций: точно довести и выровнять инерционный и несимметричный груз до попадания упоров штыря в зону гарантированного захвата крюками (практически до полного охвата гнездом штыря), зафиксировать груз или хотя бы предохранить его от малейшего "ускользания" из этой зоны какими-либо вспомогательными средствами и лишь затем, освободив обе руки, одной рукой взяться за поручень на поверхности станции, а другой рукой затянуть крюки предполагаемой рукояткой. Недостаток обусловлен отсутствием в прототипе взведенных, готовых к захвату средств предварительного захвата, позволяющих удерживать штырь в гнезде сразу после контакта и еще до выравнивания, отсутствием ручного управления этими средствами и крюками, а также неоптимальным расположением фиксирующих средств (крюков) по периферии стыковочного устройства, что уменьшает угловой размер зоны гарантированного захвата крюками и, следовательно, допуск на угловой промах.
Отсутствие средств предварительного захвата значительно осложняет стыковку не только вручную, но также и стыковку манипулятором к незафиксированному, дрейфующему в невесомости объекту.
Задачей изобретения является расширение функциональных возможностей путем обеспечения возможности стыковки и расстыковки вручную космонавтом с сохранением возможности стыковки и расстыковки манипулятором, а также повышение надежности.
Поставленная задача решается тем, что в стыковочном устройстве, состоящем из активной части, содержащей гнездо, выполненное в виде воронки, сопряженной в суженной части со стаканом, а в расширенной части с базовым кольцом, и механизм стягивания, включающий в себя k крюков, где k = 1, 2,..., и механизм перемещения крюков, и из пассивной части, выполненной в виде штыря, сужающегося от основания к головке и имеющего уступы с упорами для рогов крюков активной части, причем боковая поверхность головки охвачена стаканом, боковая поверхность основания охвачена базовым кольцом, а крюки установлены с возможностью выдвижения их рогов в направлении расширения воронки и втягивания в направлении сужения воронки от исходного положения, соответствующего положению рогов на упорах пассивной части в состыкованном состоянии, и соединены с выходными звеньями механизма привода крюков, в активную часть устройства введены m защелок предварительного захвата и защелок фиксации стыковки, где m = 1, 2,..., установленных на гнезде в направляющих с возможностью перемещения их зубьев в поперечном оси стакана направлении и снабженных ограничителями перемещения в направлении к оси стакана, а также введены механизмы отвода крюков при втянутом положении, механизмы отжима защелок при выдвинутом положении крюков, фиксатор выдвинутого положения крюков, рукоятка, соединенная с одним из подвижных звеньев механизма перемещения крюков, при этом зубья защелок предварительного захвата размещены в отверстиях, выполненных в стенке гнезда в зоне сопряжения воронки и стакана, защелки и крюки подпружинены в направлении к оси стакана, механизм перемещения крюков подпружинен в направлении втягивания крюков, рога крюков размещены в продольных прорезях, выполненных в гнезде, механизм стягивания выполнен с дополнительными степенями свободы рогов крюков, поперечных направлению выдвижения, а в пассивной части устройства уступы с упорами для рогов крюков расположены на головке штыря и введены впадины с упорами для зубьев защелок.
Предлагается механизмы отжима защелок при выдвинутом положении крюков выполнять поводковыми с ведущими поводками, установленными на одном из подвижных звеньев механизма перемещения крюков, и ведомыми поводками, установленными на защелках.
Механизмы отвода крюков при втянутом положении предлагается выполнять поводковыми с ведущими поводками, установленными на гнезде, и ведомыми поводками, установленными на крюках, причем поводки устанавливать с зазором между ними в направлении вдоль оси стакана, меньшим величины хода крюков на втягивание.
Крюки и/или защелки предлагается выполнять в виде П-образных рамок, причем соответственно рог крюка и/или зуб защелки располагать на перекладине рамки поперек нее.
Защелки фиксации стыковки предлагается выполнять либо совмещенными с защелками предварительного захвата, при этом количество впадин с упорами для зубьев защелок на пассивной части в n раз превосходит количество зубьев защелок, где n = 2, 3,..., либо с жестким соединением между зубьями защелок предварительного захвата и зубьями защелок фиксации стыковки.
Крюки и защелки предлагается располагать относительно оси стакана попарно диаметрально противоположно, а пружины защелок и крюков совмещать и прикреплять каждую одним концом к крюку, а другим концом к парной противоположной защелке.
Введенные в активную часть защелки предварительного захвата и соответствующие им впадины с упорами для зубьев защелок, введенные в пассивную часть, обеспечивают взаимное удержание активной и пассивной частей до начала выравнивания и стягивания их крюками, освобождая руки космонавта и позволяя ему произвести выравнивание и стягивание. Защелки фиксации стыковки на активной части и соответствующие им впадины с упорами для зубьев на пассивной части позволяют замкнуть соединение в момент окончания ручного насаживания гнезда на штырь, предотвращая отскакивание полезного груза после удара, сохраняя достигнутое положение перед окончательным стягиванием. Для надлежащего выполнения своих функций оба типа защелок установлены в направляющих с возможностью перемещения их зубьев в поперечном оси стакана направлении, прижимаются пружинами в направлении к оси стакана и снабжены ограничителями перемещения в этом же направлении, препятствующими выпадению внутрь гнезда.
Механизмы отжима защелок при выдвинутом положении крюков обеспечивают размыкание защелок одновременно с размыканием крюков одним движением рукоятки. Механизмы отвода крюков при втянутом положении обеспечивают уборку крюков и освобождение полости гнезда для уменьшения сопротивления стыковке. Фиксатор выдвинутого положения крюков фиксирует разомкнутое состояние механизмов, позволяет космонавту отпустить рукоятку и освободившейся рукой отвести груз, завершив тем самым расстыковку. Рукоятка, соединенная с одним из подвижных звеньев механизма перемещения крюков, обеспечивает ручное замыкание и размыкание стыковочного устройства. Размещение зубьев защелок предварительного захвата в отверстиях, выполненных в стенке гнезда в зоне сопряжения воронки и стакана, обеспечивает захват головки штыря при больших угловых промахах, характерных при ручной стыковке.
Выполнение механизма стягивания с дополнительными, поперечными направлению выдвижения степенями свободы рогов крюков обеспечивает крюкам возможность отжаться и обогнуть головку штыря как при выдвижении для зацепления предварительно захваченного штыря при стыковке, так и при выдвижении для отжима защелок при расстыковке. Пружины крюков обеспечивают их прижим к штырю и зацепление за упоры штыря при втягивании. Пружина, воздействующая на механизм перемещения крюков в направлении втягивания крюков, обеспечивает сохранение прижима активной и пассивной частей и замкнутого состояния устройства после отпускания космонавтом рукоятки и увеличение усилия при стягивании. Продольные прорези, выполненные в гнезде, обеспечивают рогам крюков в процессе их перемещения доступ внутрь гнезда и контакт со штырем. Расположение уступов с упорами для рогов крюков на головке штыря обеспечивает гарантированный захват крюками при больших угловых промахах, характерных для стыковки вручную.
Выполнение механизмов отжима защелок при выдвинутом положении крюков поводковыми с ведущими поводками, установленными на одном из подвижных звеньев механизма перемещения крюков, и ведомыми поводками, установленными на защелках, позволяет реализовать отжим защелок простейшими средствами.
Выполнение механизмов отвода крюков при втянутом положении поводковыми с ведущими поводками, установленными на гнезде, и ведомыми поводками, установленными на крюках, реализует необходимую функцию простейшими средствами. Установка поводков с зазором в исходном положении (соответствующем положению крюков на упорах полностью втянутого штыря) обеспечивает стягивание стыка крюками. Ограничение зазора между поводками в направлении вдоль оси стакана величиной, меньшей величины хода крюков на втягивание, обеспечивает возникновение контакта между поводками и, следовательно, отвод крюка из внутренней полости гнезда в конце хода к моменту завершения втягивания крюков.
Выполнение крюков и/или защелок в виде П-образных рамок, на которых крюк и/или зуб защелки располагаются на перекладине рамки поперек нее, обеспечивает минимальные габариты.
Выполнение защелок фиксации стыковки совмещенными с защелками предварительного захвата при количестве впадин с упорами для зубьев защелок на пассивной части, в n раз превосходящем количество зубьев защелок, где n = 2, 3, . . . , позволяет сократить количество кинематических звеньев, уменьшить массу, габариты и стоимость с сохранением функциональных возможностей, также как и другой вариант: с жестким соединением между зубьями защелок предварительного захвата и зубьями защелок фиксации стыковки.
Расположение крюков и защелок относительно оси стакана попарно диаметрально противоположно и прикрепление одной и той же пружины одним концом к крюку, а другим концом к парной противоположной защелке обеспечивают возможность совмещения двух пружин в одной с уменьшением массы (при уменьшении количества пружин) либо с повышением надежности (при сохранении количества пружин).
Суть изобретения поясняется фигурами, на которых изображены:
Фиг. 1 - стыковочное устройство в состыкованном (исходном) состоянии, главный вид,
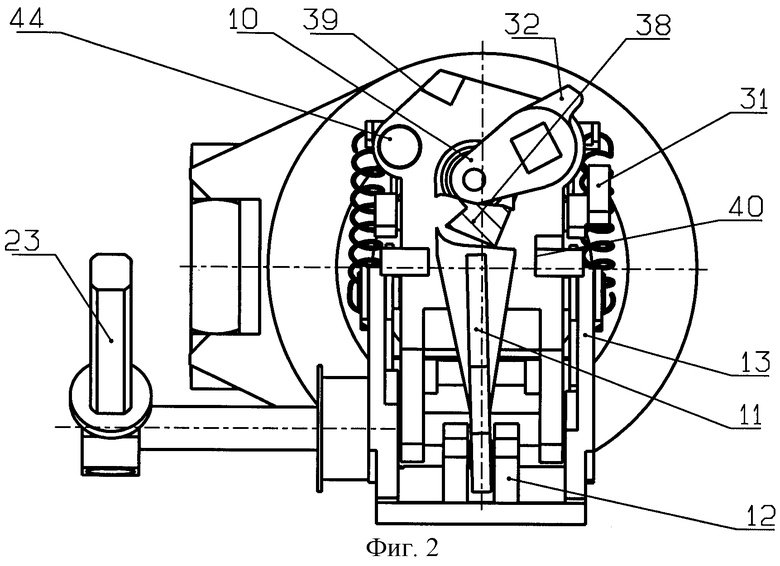
Фиг.2 - стыковочное устройство в состыкованном (исходном) состоянии, вид слева,
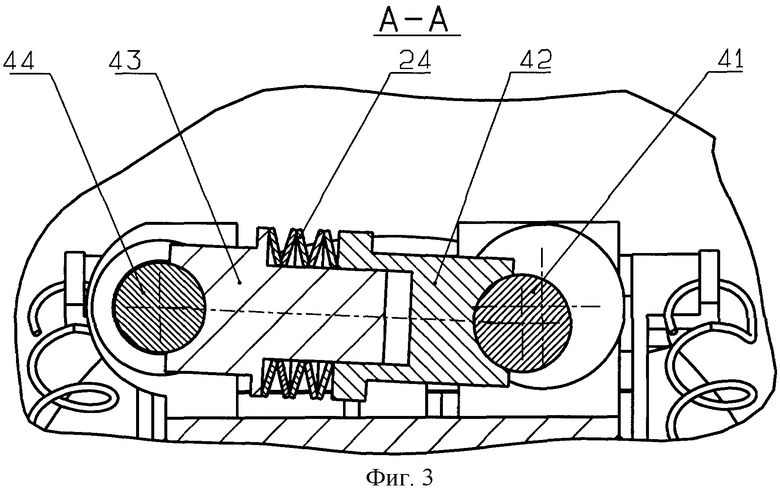
Фиг.3 - пружина механизма перемещения крюков и фиксатор выдвинутого положения крюков, сечение А-А,
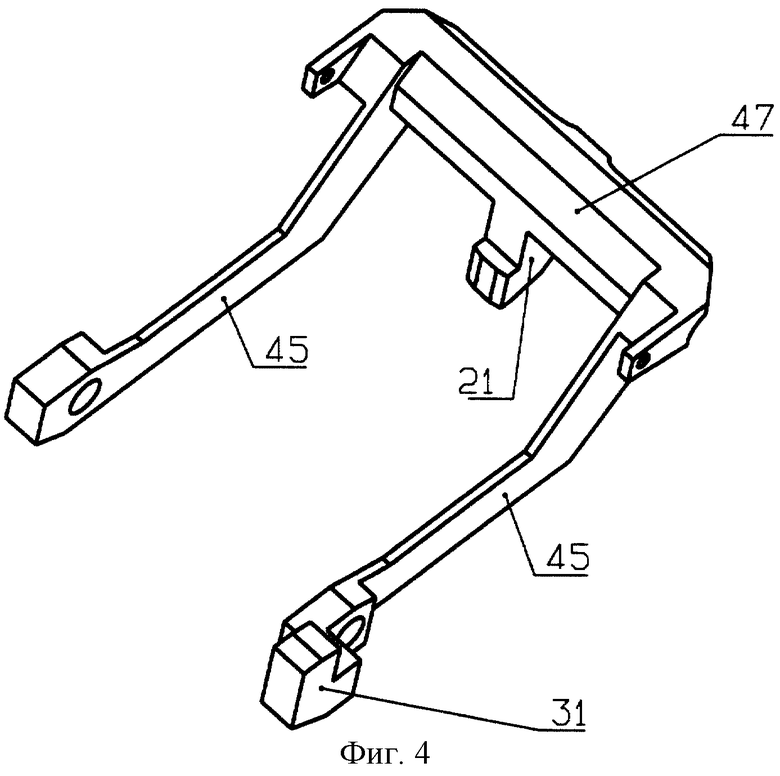
Фиг.4 - защелка,
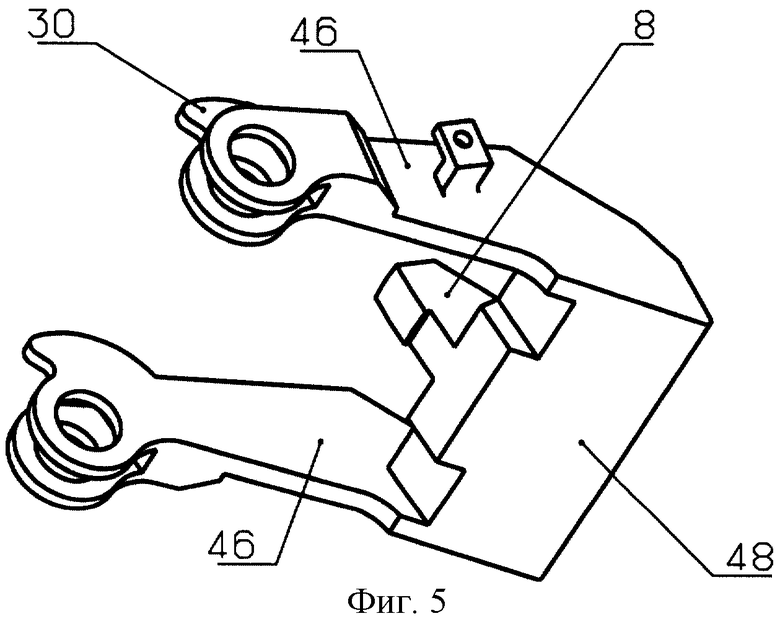
Фиг.5 - крюк,
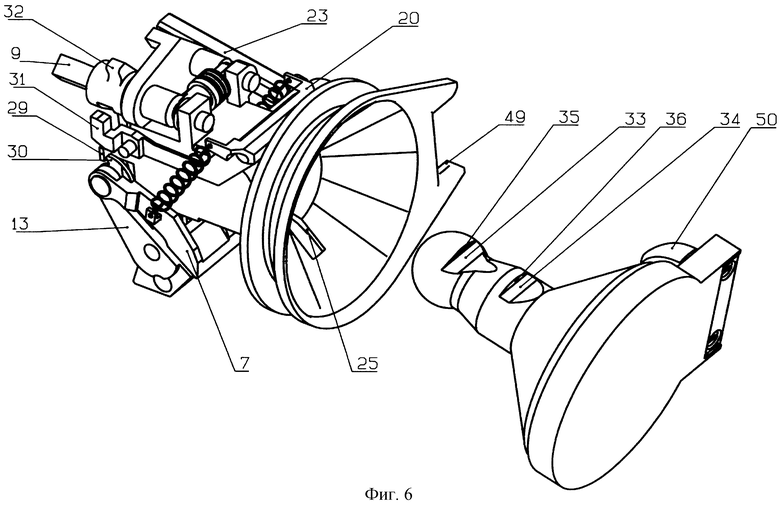
Фиг.6 - стыковочное устройство перед стыковкой,
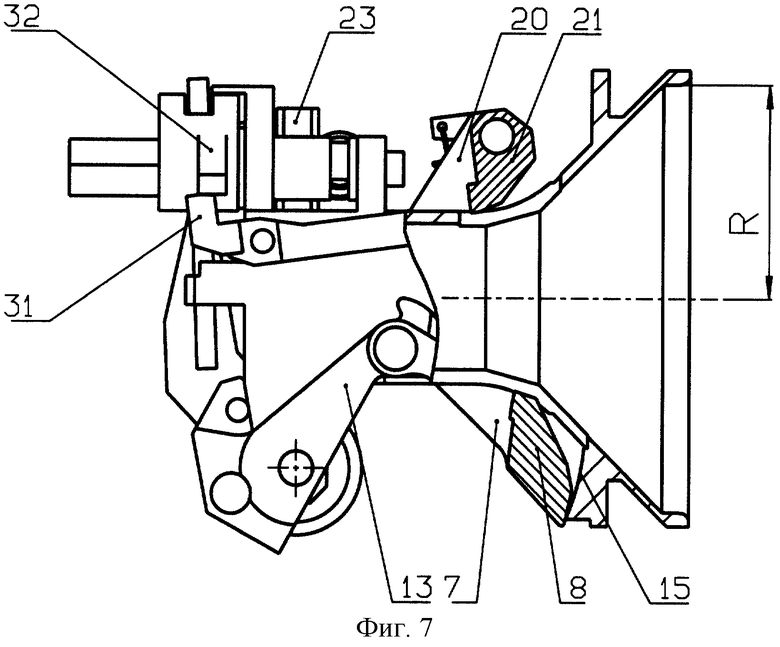
Фиг.7 - активная часть с выдвинутыми крюками,
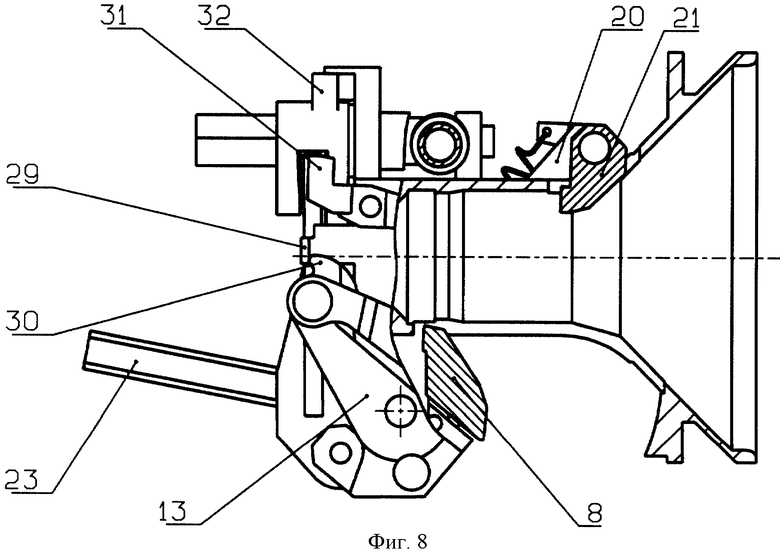
Фиг.8 - активная часть с втянутыми крюками,
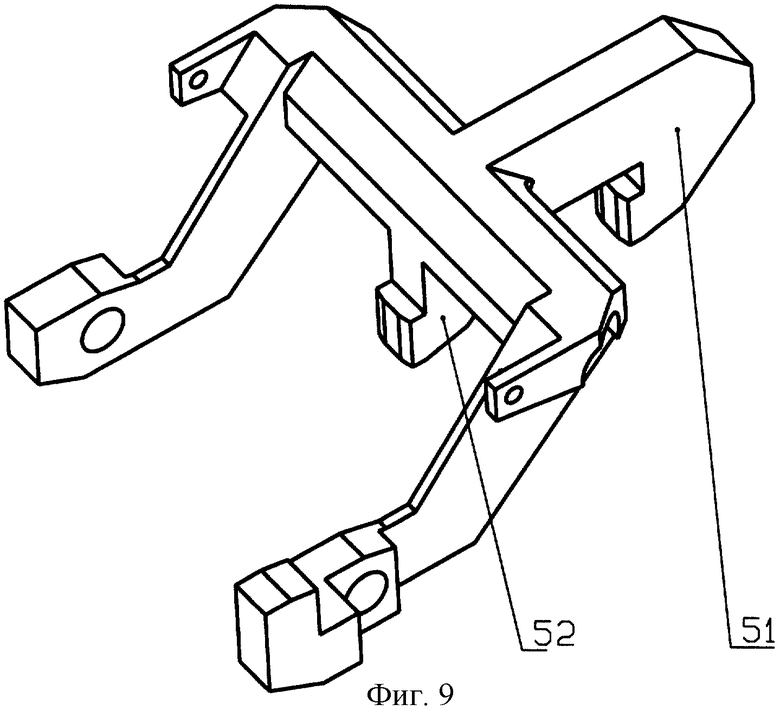
Фиг.9 - защелка, вариант с двумя зубьями,
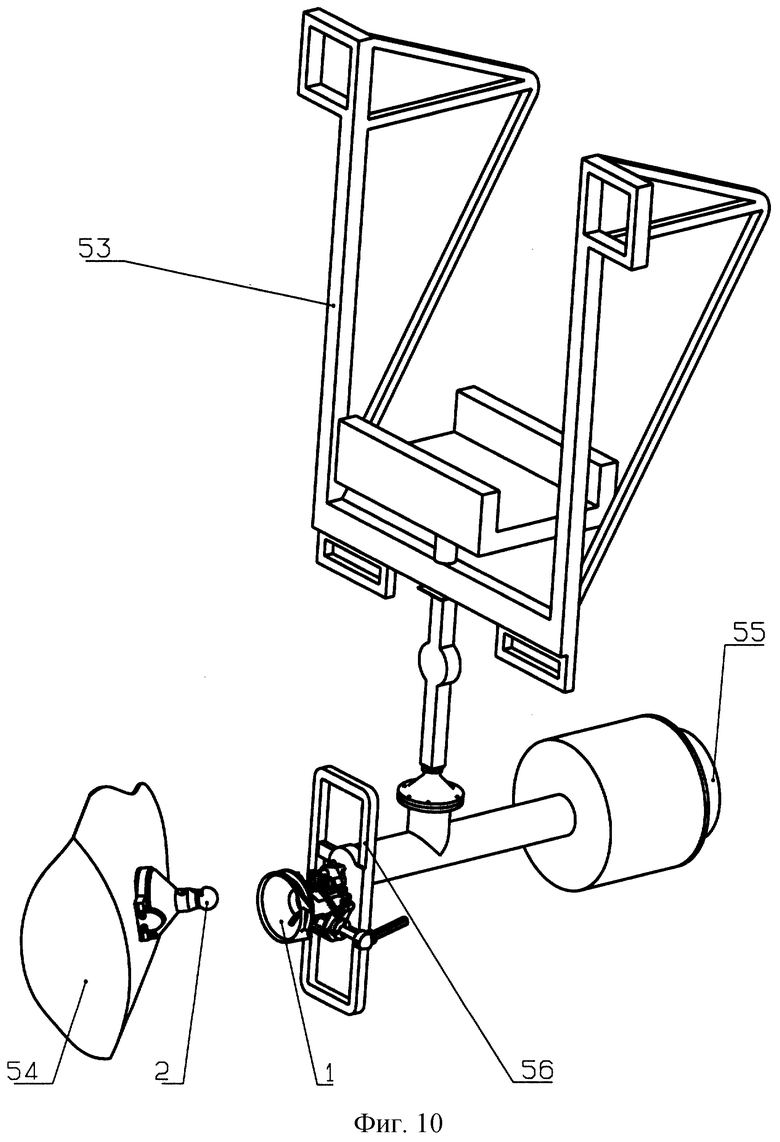
Фиг. 10 - полезный груз с активной частью стыковочного устройства и борт КС с установленной на нем пассивной частью стыковочного устройства.
Подобно прототипу стыковочное устройство (СТУ) состоит из активной 1 и пассивной 2 частей. На фиг.1 изображено СТУ в исходном - состыкованном и стянутом - положении. Несущим элементом активной части является колоколообразное гнездо. Гнездо выполнено в виде воронки 3, сопряженной в суженной части со стаканом 4, а в расширенной части с базовым кольцом 5. Для крепления к корпусу космического объекта имеется фланец 6.
На гнезде установлен механизм стягивания, включающий в себя крюк 7 с рогом 8 и механизм перемещения крюка, имеющий подвижные звенья: входное звено (вал) 9 с кривошипом 10, шатун 11, коромысло 12 с выходными звеньями (рычагами) 13. Крюк соединен с выходными звеньями шарнирами 14. На гнезде установлена направляющая 15 для крюка.
Пассивная часть СТУ выполнена в виде штыря 16, сужающегося от основания 17 к головке 18 и имеющего уступ с упором 19 для рога 8 крюка активной части.
В соответствии с предлагаемым изобретением в активную часть вводятся: подпружиненная защелка 20 с зубом 21, пружины растяжения 22, зацепленные за крюк и защелку, механизм отвода крюка при втянутом положении, механизм отжима защелки при выдвинутом положении крюка, фиксатор выдвинутого положения крюка, рукоятка 23, пружина 24, обеспечивающая прижим крюка в направлении втягивания, а также продольная прорезь 25 и отверстие 26 в стенке гнезда.
Защелка 20 с зубом 21 установлена на гнезде в направляющей вращения, упрощенно изображенной на фиг.1 как ось 27, вставленная в отверстие 28. Зуб 21 расположен в отверстии 26, выполненном в стенке гнезда в зоне сопряжения воронки 3 и стакана 4.
Рукоятка 23 жестко соединена с коромыслом 12.
Поводковый механизм отвода крюков при втянутом положении включает в себя ведущий поводок 29, установленный на гнезде с зазором ΔХ относительно ведомого поводка 30, установленного на крюке. Поводковый механизм отжима защелки при выдвинутом положении крюков включает в себя ведомый поводок 31, установленный на защелке 20, и ведущий поводок 32, установленный на валу 9.
В пассивную часть СТУ введены впадины 33 и 34 с упорами 35 и 36 для зуба защелки, а уступ с упором 19 для рога крюка расположен на головке 18 штыря в углублении 37.
Вал 9 имеет выступ 38, расположенный между ограничителями поворота вала 39 и 40, жестко установленными на гнезде (фиг.2).
Фиксатор выдвинутого положения крюков (фиг.3) включает в себя эксцентрик 41, расположенный на валу 9, шток 42, направляющую 43, шарнирную опору 44, а также пружину 24.
Защелка 20 и крюк 7 выполнены в виде П-образных рамок (фиг.4 и 5), имеющих по два боковых стержня 45 и 46, соединенных перекладинами 47 и 48. Зуб 21 защелки расположен на перекладине 47, рог 8 крюка - на перекладине 48. Перекладина 47 и наружная боковая поверхность гнезда служат ограничителем перемещения защелки в направлении к оси стакана.
В активной части имеется боковое гнездо 49, а в пассивной части - боковой штырь 50 для выравнивания по крену и удержания вращающего момента по крену (фиг.6).
При выполнении защелок предварительного захвата и защелок фиксации стыковки с жестким соединением между зубьями оба зуба 51 и 52 могут быть установлены на одной защелке (фиг.9).
Активная часть 1 устанавливается на полезных грузах (ПГ), например на переносном рабочем месте (ПРМ) 53 космонавта, перемещаемом в ту или иную зону проведения работ на КС 54 и монтируемом там на пассивных частях 2 манипулятором за такелажный элемент 55 либо космонавтом за поручень 56 (фиг.10). Пассивных частей 2 на внешней поверхности КС размещается до нескольких десятков.
Стыковочное устройство целесообразно использовать на обитаемых космических или подводных объектах, оснащенных роботом-манипулятором, например на международной космической станции (МКС). На внешней поверхности КС в процессе ее монтажа и эксплуатации монтируется, демонтируется и перемещается множество объектов, причем действия производятся как космонавтами, так и манипуляторами, которых на МКС предусмотрено не менее пяти. Отсюда необходимость иметь универсальное стыковочное устройство, способное стыковаться как вручную, так и манипулятором - в зависимости от обстоятельств. Объектами, или полезными грузами, могут быть ПРМ, контейнер научной аппаратуры, солнечная батарея и др.
В орбитальном полете большую часть времени СТУ находится в исходном - состыкованном и стянутом крюком - положении (фиг.1) и выполняет функцию разъемного соединения между КС и каким-либо ПГ.
Например, ПРМ хранится состыкованным со штырем на внешней поверхности одного из отсеков, но при необходимости переносится в любой конец КС на десятки метров и пристыковывается к другому штырю, установленному на месте проведения работ.
В состыкованном состоянии СТУ должно обладать большой нагрузочной способностью, причем из-за несимметричности ПГ относительно оси СТУ особенно велики моментные нагрузки, возникающие, например, при случайном ударе космонавта о поручень ПРМ. Конструкция СТУ хорошо приспособлена к восприятию моментных нагрузок. Базовое кольцо 5 и стакан 4 служат в состыкованном состоянии радиальными опорами штыря 16 пассивной части 2. Изгибающий момент вызывает две силы реакции: одну между головкой 18 и стаканом 4, другую между основанием 17 и базовым кольцом 5. Внутренние поверхности стакана 4 и базового кольца 5 выполнены либо цилиндрическими, либо с небольшой (до 10o, т. е. меньше угла трения) конусностью. Реакции на таких поверхностях не имеют или имеют очень малую осевую составляющую и, следовательно, нагружают только статичные, заведомо прочные благодаря большим размерам корпусные детали штыря и гнезда, но не крюки и не механизмы со сложной кинематикой, множеством шарниров и стержней. Прочностные качества штыря близки к идеальным: в основании 17, где изгибающий момент максимален, поперечный размер также максимален. Вращающий (по крену) момент воспринимается основанием 17 и боковым штырем 50, распложенным, в отличие от прототипа, на периферии СТУ, что обеспечивает большое плечо и относительно малые реакции.
Максимально возможные линейные нагрузки в несколько раз меньше реакций на моментные нагрузки. Поэтому поперечная линейная нагрузка несущественна для воспринимающих ее базового кольца 5 и основания 17. Осевая нагрузка передается на упор 19 штыря через рог 8 крюка 7, а при деформации крюка, превышающей люфты в защелке 20, часть нагрузки передается через зуб 21 на упор 36. Таким образом, осевая нагрузка распределяется между крюком 7 и защелкой 20. Контактная поверхность рога 8 крюка выполнена выпуклой с большим радиусом кривизны, что в совокупности с плоской или такой же выпуклой поверхностью соответствующего упора 19 на штыре обеспечивает достаточную контактную прочность. Аналогично выполнена контактная пара "зуб 21 - упор 36".
Пружины 22 предохраняют крюк 7 и защелку 20 в состоянии хранения (исходном состоянии) от случайного выхода из зацепления со штырем 16 под влиянием ударных перегрузок. Выполнение крюка 7 и защелки 20 в виде П-образных рамок обеспечивает наименьшие габариты СТУ, так как позволяют компактно разместить шарниры 14 крюка и аналогичные шарниры защелки вокруг стакана 4, причем каждый шарнир имеет уменьшенный габарит благодаря удвоению количества шарниров и, следовательно, уменьшенной вдвое нагрузке. Кроме того, боковые стержни 45 и 46 П-образных диаметрально противоположно расположенных рамок удобно напрямую соединить пружиной растяжения 22, что позволяет такой совмещенной пружиной прижимать как крюк, так и защелку, причем пружина не увеличивает габариты СТУ, несмотря на необходимость значительного свободного пространства для ее перемещения в продольном направлении вслед за крюком. Для увеличения надежности установлены две параллельные пружины 22, каждая из которых обеспечивает функционирование СТУ в случае обрыва другой пружины.
Тарельчатая пружина 24, воздействующая на вал 9 через эксцентрик 41 и далее через механизм перемещения крюка на крюк 7 в сторону втягивания, обеспечивает контакт и прижим между рогом 8 и упором 19 в режиме хранения при случайных ударных перегрузках.
Расстыковка соединения легко производится последовательным выполнением двух операций:
а) выдвижением крюка 7 с одновременным отжимом защелки 20;
б) отведением активной части 1 от пассивной части 2.
Вначале необходимо подключенным к манипулятору электроприводом (на фигурах не показан) за вал 9 или вручную за рукоятку 23 привести в движение механизм перемещения крюков в сторону выдвижения до упора выступом вала 38 в ограничитель 39. Установленный на валу 9 кривошип 10 через шатун 11 со сферическими подшипниками на концах поворачивает коромысло 12, жестко соединенное с рычагами 13. Рычаги 13 через шарниры 14 толкают крюк 7. Крюк скользит вначале рогом 8 по штырю 16, огибая его контур благодаря дополнительной степени свободы в поперечном выдвижению направлении. Дополнительная степень свободы рога 8 крюка, поперечная направлению выдвижения, возникает благодаря тому, что крюк 7 не имеет (в отличие от прототипа) направляющей, ограничивающей перемещение его рога 8 в направлении от оси СТУ: вместо жесткой направляющей введена податливая пружина 22. Затем крюк скользит перекладиной 48 по направляющей 15, заставляющей его отклониться и отвести рог 8, освобождая полость гнезда для беспрепятственного снятия со штыря. При этом срабатывает и механизм отжима защелки: ведущий поводок 32 нажимает на поводок 31, защелка поворачивается вокруг оси 27, зуб 21 освобождает упор 36 и выводится из полости гнезда.
СТУ подготовлено к завершению расстыковки манипулятором - отведению активной части от пассивной. В процессе отведения крюк 7 и защелка 20 должны оставаться в разомкнутом положении. В случае расстыковки манипулятором это легко обеспечивается поддержанием вала 9 выступом 38 на ограничителе 39 либо электроприводом, либо электрически управляемым тормозом, соединенными с электрическими цепями манипулятора, но для ручной расстыковки требуется механический фиксатор. Эксцентрик 41 и шток 42 фиксатора в конце хода на выдвижение крюков проходят мертвую точку, после которой усилие тарельчатой пружины 24 обеспечивает прижим механизма перемещения крюков в направлении выдвижения и, следовательно, фиксацию выдвинутого положения крюков. Теперь СТУ разомкнуто, механизмы активной части в этом разомкнутом положении зафиксированы (фиг. 7). Космонавт в случае ручной расстыковки может, оставив рукоятку, взяться одной рукой за поручень на КС, другой - за поручень 56 на ПГ (фиг. 10) и, отводя ПГ от КС, снять гнездо со штыря, завершив тем самым расстыковку. Манипулятор завершает расстыковку прямолинейным отведением ПГ 53 с активной частью 1 СТУ от пассивной части 2.
В примере конкретного исполнения, приведенном на фиг.1-8, в качестве механизма перемещения крюка выбран кривошипно-коромысловый механизм, а в качестве механизма отжима защелки - поводковый механизм. Сущность изобретения не меняется при использовании других типов механизмов: винтовых (как механизм перемещения крюков в прототипе), кулачковых, зубчатых и т.д. Количество крюков и/или защелок может быть более одного, например три крюка (как в прототипе) или три защелки (как в упоминавшемся патенте США 4431333, 1984 г., МПК В 25 С 3/18).
Стыковка производится последовательным выполнением четырех операций:
а) втягивание крюка с одновременным освобождением защелки;
б) сближение и насаживание гнезда на штырь до остановки;
в) выдвижение крюка;
г) стягивание стыка.
Для стыковки манипулятором операции "а" и "в" не обязательны. Подготовительная операция - втягивание крюка 7 с одновременным освобождением защелки - проводится поворотом либо рукоятки 23 вручную, либо поворотом вала 9 электроприводом (не показан). В обоих случаях втягивание продолжается до момента упора выступа 38 в ограничитель 40 (фиг.2). Крюк 7, втягиваемый рычагами 13 и прижимаемый пружинами 22, скользит перекладиной 48 по направляющей 15, затем по внешней поверхности воронки 3 и стакана 4. Если величина зазора ΔХ меньше величины хода на втягивание от исходного положения, то после прохождения положения, соответствующего исходному, но перед окончанием втягивания зазор ΔХ выбирается и срабатывает механизм отвода крюка: неподвижный ведущий поводок 29 встречает надвигающийся поводок 30 крюка, вынуждая втягиваемый крюк поворачиваться вокруг скользящей точки контакта поводков 29 и 30 и отводить рог 8 из полости стакана. При положении выступа 38 вала 9 на ограничителе 40 рог 8 крюка полностью отводится из полости стакана 4, освобождая эту полость для беспрепятственного движения головки 18 штыря. Отвод рога 8 крюка необходим для исключения сопротивления крюка стыковке и обеспечения тем самым возможности стыковки простым нажатием на полезный груз в направлении стыковки. Описанный поводковый механизм представляется простейшим для выполнения заданной функции - отвода крюка, но возможны и иные воплощения.
Одновременно с втягиванием крюка 7 происходит освобождение защелки 20. Поводок 32 движется вместе с валом 9 против часовой стрелки (глядя с конца вала, фиг.2), что позволяет поводку 31 двигаться следом под действием пружин 22, а зубу 21 защелки опускаться в полость гнезда, пока перекладина 47 защелки не упрется в наружную поверхность гнезда.
Тарельчатая пружина 24 большую часть хода на втягивание через шток 42 и эксцентрик 41 (после прохождения последними мертвой точки) воздействует на механизм стягивания в сторону втягивания крюка. После остановки выступа 38 на ограничителе 40 усилие пружины 24 фиксирует положение механизма стягивания (но не защелки 20) в течение следующей операции.
В состоянии с втянутым и отведенным из полости стакана рогом 8 и освобожденной защелкой 20 активная часть СТУ полностью подготовлена к стыковке как вручную, так и манипулятором (фиг.8).
В продолжение следующей операции движитель (рука или манипулятор) подталкивает и направляет полезный груз в направлении сближения гнезда со штырем до вынужденной остановки, регистрируемой сенсорами человека или манипулятора. Операцию в зависимости от характера взаимодействия между активной и пассивной частями можно разбить на три этапа: до контакта, контакт в одной точке, контакт более чем в одной точке, а в зависимости от состояния захвата - на два этапа: до предварительного захвата, после предварительного захвата.
После первого контакта с воронкой 3 либо со скругленной кромкой базового кольца 5 головка 18 штыря соскальзывает по воронке в стакан 4 (для упрощения описания здесь и в некоторых местах далее в качестве движущегося объекта условно называется штырь 16). Одним из требований к форме и размерам гнезда и штыря в момент контакта является способность компенсировать радиальный и угловые промахи траектории сближения при контакте. Диаметр воронки 150 мм достаточен для ликвидации радиальных промахов 60 мм, допускаемых при стыковке грузов малой массы (менее одной тонны) на МКС. Внутренняя поверхность воронки 3 выполняется преимущественно конической из соображений технологичности, но может быть пирамидальной, конической с овальным основанием или еще более усложненной формы для достижения, например, выравнивания крена и восприятия момента по крену без дополнительной боковой пары штырь-гнездо. При этом сопряженные с воронкой базовое кольцо и стакан должны быть соответствующим образом видоизменены. Оси стакана и базового кольца не обязательно должны совпадать или быть параллельными оси воронки.
Существенным для стыковки вручную является требование уменьшения количества совмещаемых одновременно перед захватом кинематических пар до одной пары штырь-гнездо. В конструкции по патенту США 4431333 количество совмещаемых одновременно пар штырь-гнездо равно трем, что значительно затруднило бы работу космонавта. В прототипе перед захватом необходимо совместить кроме центральных также и боковые штырь и гнездо, обеспечивающие ликвидацию крена. В предлагаемой конструкции перед захватом достаточно совместить лишь один штырь с одним гнездом.
Соскользнув в стакан, головка штыря 18 отжимает зуб 21 защелки (при условии достаточной активной или инерционной силы, подталкивающей ПГ). Затем зуб 21 защелки западает во впадину 33, осуществляя предварительный захват.
Предварительный захват должен быть осуществим и при максимальных угловых промахах. Угловые промахи по тангажу, рысканию, крену при стыковке точным манипулятором относительно малы и не превышают 2,5o. При стыковке вручную они в несколько раз больше: 10o-15o. Поэтому расположение зуба 21 защелки в зоне сопряжения воронки 3 и стакана 4 является существенным для стыковки вручную. Если перенести отверстие 26 и зуб 21 вглубь стакана 4, контакт штыря с гнездом во второй точке возникнет раньше предварительного захвата. При контакте в двух точках сопротивление сближению резко возрастает и может вызвать остановку еще до срабатывания защелки предварительного захвата, что противоречит поставленной задаче. Если же вынести отверстие 26 и зуб 21 защелки на воронку 3, то зуб 21 или не зацепит, или после срабатывания не удержит головку штыря из-за разницы в поперечных размерах головки и воронки, или отожмется упором головки штыря при большом угле тангажа.
При дальнейшем проникновении штыря в гнездо возникает контакт между ними во второй точке - между скругленной кромкой базового кольца и конусом штыря (до этого в каждый момент времени контакт существовал только в одной точке между головкой 18 штыря и внутренней поверхностью гнезда). С этого момента сопротивление стыковке возрастает, так как выравнивание вызывает не только поворот ПГ вокруг его центра масс или вокруг шарнира запястья манипулятора, но и перемещение центра масс поперек направления стыковки, что вызывает значительно большие инерционные нагрузки, контактные силы и силы трения. При касании боковым штырем 50 бокового гнезда 49 возникает третья точка контакта и сила сопротивления может еще увеличиться.
СТУ с одной стыковочной головкой и колоколообразными гнездом и штырем присуще важное для ручной стыковки качество, которое отсутствует в многоштыревых СТУ, - способность стыковаться, даже если линия действия сближающей объекты силы и/или проекция центра масс на стыковочную плоскость удалены от центральной оси СТУ. При ручной стыковке одним космонавтом линия действия силы принципиально проходит вне стыковочного устройства и не через центр масс ПГ, так как космонавт одной рукой держится за поручень на поверхности станции, а другой - за боковой поручень полезного груза. Точка захвата манипулятором для большинства грузов также удалена от прямой линии "центр СТУ - центр масс ПГ". Следовательно, если в трехштыревом СТУ, описанном выше (патент США 4431333), при стыковке первым коснулся конуса и затормозился штырь, ближайший к линии действия движущей или инерционной силы, то под влиянием этой силы остальные штыри будут не приближаться, а удаляться от соответствующих конусов. Этот недостаток приведет к тому, что после захвата первого штыря груз по инерции или под действием движущей силы начнет поворачиваться вокруг головки захваченного штыря в пределах люфта в защелке, причем не состыкованные штыри и гнезда будут расходиться, затем после выбора люфта произойдет динамический удар, нерасчетные нагрузки от которого вызовут поломку либо захваченного штыря, либо его гнезда, либо защелки.
В предлагаемом СТУ процесс проходит нормально и в этом неблагоприятном случае внецетренной стыковки. Приведенная на фиг.1, 6-8 колоколообразная с удлиненными стаканом и головкой форма гнезда и штыря, при которой минимальное расстояние между двумя точками их контакта не менее радиуса воронки, обеспечивает стыковку при расстоянии L между осью СТУ и вектором движущей силы до L ≈ R/(2fтp) ≈ 4R, где R - половина поперечного размера (радиус) СТУ, fтp - коэффициент трения, (тогда как для трехштыревого СТУ Lmax = R, т. е. вчетверо меньше). При диаметре воронки 150 мм L=300 мм, чего вполне достаточно для большинства ПГ. Но даже если стыковка начата при большем L, поломки штыря или защелки не произойдет, а ПГ в худшем случае просто остановится из-за трения, после чего стыковку можно продолжать.
Манипулятор вслед за предварительным захватом продолжает стыковку без остановки, а космонавт может выбрать из двух вариантов: продолжать штатную стыковку без остановки или, в случае наблюдаемых или прогнозируемых отклонений от нормы, остановиться для оценки ситуации, выравнивания ПГ, перехвата за более удобный поручень и т.д. Например, при наблюдаемом слишком большом крене выгоднее притормозить ПГ рукой, выровнять крен до допустимого и затем продолжить стыковку.
Для выравнивания при насаживании гнезда на штырь существенное значение имеет выравнивающий момент, обусловленный реакциями, возникающими в двух точках контакта между штырем и гнездом и расстоянием между этими точками. Достоинством конструкции является большой выравнивающий момент. В предлагаемом СТУ, имеющем колоколообразное гнездо и соответствующий гнезду штырь, расстояние между двумя точками контакта при выравнивании не может быть меньше высоты воронки и близко к максимально возможному (т.е. текущей глубине погружения штыря). Следовательно, выравнивающий момент также максимален, что снижает требования к порогу чувствительности системы управления манипулятором и облегчает стыковку.
После возникновения в процессе стыковки одновременного контакта гнезда и штыря более чем в одной точке возможны две ситуации: стыковка либо продолжается без остановки до фиксации (штатная ситуация), либо приостанавливается (расчетная нештатная ситуация).
Если запас кинетической энергии или движущая сила достаточно велики и преодолевают силу сопротивления, взаимное проникновение активной и пассивной частей СТУ продолжается, защелка отжимается вторично и зуб 21 западает во впадину 34, осуществляя фиксацию стыковки с небольшим (0,4 мм) люфтом, допустимым для некоторых грузов, не требующих прецизионной установки. Стыковку можно было бы считать завершенной, но целесообразно для выборки люфта, повышения надежности и нагрузочной способности дополнительно стянуть стык крюком.
Для стягивания стыка приводится в действие вначале на выдвижение, затем на втягивание механизм перемещения крюка. Рог 8 крюка выдвигается, огибая головку 18 штыря благодаря дополнительной степени свободы, западает в углубление 37, притягиваемый пружиной 22, и при обратном движении зацепляет упор 19 и стягивает СТУ, чем и завершается стыковка. Механизмы возвращены в исходное положение (фиг.1). В этом положении обязателен зазор ΔХ между поводками 29 и 30 механизма отвода крюков, обеспечивающий как максимальное тяговое усилие на крюке, так и максимальное остаточное усилие стягивания. Если зазор отсутствует, то большая часть усилия, приходящего на крюк 7 с рычага 13 через шарнир 14, замкнется через контакт поводка 29 с поводком 30 и может сломать эти не силовые элементы.
Если после предварительного захвата запас кинетической энергии и движущая сила малы или недостаточен порог чувствительности сенсоров манипулятора, обеспечивающий выравнивание, или сила, приложенная космонавтом, направлена неверно и вызывает перекос штыря и гнезда вместо выравнивания, или на стыковочные поверхности попало загрязнение, стыковка остановится и фиксации защелкой за упор 36 не произойдет. Далее в зависимости от некоторых факторов (запаса времени на операцию, массы ПГ и др.) экипаж принимает решение: повторять ли попытку стыковки нажатием на ПГ либо сразу приступить к стягиванию крюком. Повторная попытка нажатием на ПГ предпочтительна, так как фиксация защелкой 20 без использования механизма стягивания свидетельствует об исправности механизмов и случайности отказа. Если не удается зафиксировать стыковку защелкой без использования механизма стягивания, то для завершения стыковки необходимо совершить качательное движение валом 9 или рукояткой 23 вначале на выдвижение, затем на втягивание крюка 7. Диапазон хода крюка на выдвижение должен быть достаточным для зацепления головки 18 штыря в любом положении после предварительного захвата. Так же, как и в случае стягивания после фиксации, описанном выше, рог 8 крюка при обратном ходе зацепляет упор 19 и стягивает СТУ. Усилие стягивания на порядки превосходит движущую силу, развиваемую космонавтом или манипулятором. Такого усилия достаточно не только для преодоления трения, сопротивления пружин защелки и сопротивления шарниров манипулятора, но и для смятия мелких частиц загрязнения на стыковочных поверхностях. В конце стягивания срабатывает защелка 20 (зуб 21 захватывает упор фиксации 36) и устройство полностью состыковано.
По сравнению с прототипом наряду с приобретением новой функциональной возможности, а именно: возможности стыковки и расстыковки вручную в условиях невесомости, повышается также надежность за счет введения функционального дублирования: крюк 7 и защелка 20 взаимно дублируют друг друга. В состыкованном состоянии любой из фиксирующих элементов - защелка 20 на упоре фиксации 36 или крюк 7 на упоре 19 - обеспечивает удержание ПГ на штыре. При нештатной стыковке манипулятором в случае, если не закрылась защелка 20, ПГ можно временно оставить закрепленным только крюком; если отказал механизм стягивания - закрепленным только защелкой. Большой ход крюка и расположение крюка близко к оси СТУ обеспечивают большую (по сравнению с прототипом) зону гарантированного захвата крюком: 45 мм по оси и ±15o по углам. При ручной нештатной стыковке, если защелка 20 не захватывает упор фиксации 36 по какой-либо причине, большая зона гарантированного захвата крюком, а также возможность изменения способа захвата рукой поручней ПГ или рукоятки СТУ, пока ПГ удерживается защелкой предварительного захвата, обеспечивают космонавту возможность стянуть устройство крюком 7 и оставить в этом допустимом положении до страховочного крепления ПГ фалами.
В качестве механизма перемещения крюка использован кривошипно-коромысловый механизм, удобно компонующийся при расположении вала параллельно или соосно оси стакана. Механизм, содержащий кривошип, легко выполнить с мертвой точкой, переход за которую превращает механизм в необратимый. Нелинейную характеристику этого механизма выгодно использовать для увеличения передаточного числа и, следовательно, усилия на крюке в конце хода.
В примере конкретного исполнения (фиг.1-8) одна защелка 20 с одним зубом 21 выполняет две функции: предварительный захват и фиксацию стыковки и срабатывает в течение стыковки два раза. При таком совмещенном исполнении защелок количество впадин с упорами под зуб на штыре должно соответствовать количеству срабатываний, т.е. равно двум (впадины 33 и 34). Если позволяют габариты, то можно ввести дополнительные ступени предварительного захвата для упрощения и повышения надежности стыковки введением дополнительных (сверх двух) впадин с упорами под зуб на штыре. (Механизм при этом выглядит как храповой, в котором роль собачки играет защелка). Таким образом, при совмещении защелок количество впадин с упорами для зубьев защелок на пассивной части в n раз превосходит количество зубьев защелок, где n = 2, 3,...
Совмещение двух типов защелок (как предварительного захвата, так и фиксации стыковки) в одной защелке 20 - частный случай изобретения. Но очевидно, что в общем случае могут быть раздельно установлены защелки обоих типов, каждый из которых специализирован на одной функции. Например, защелки фиксации могут быть размещены по периферии СТУ, на базовом кольце, при этом отжим защелок может быть не одновременным, если этого требует алгоритм расстыковки или стягивания. Защелок каждого типа может быть несколько, также как и крюков, причем в неодинаковом количестве. Конкретное количество определяется многими факторами, например компромиссом между надежностью и габаритами.
Кроме того, возможен вариант с жестким соединением зубьев двух защелок или с двумя зубьями 51 и 52 на одной защелке (фиг.9), один из которых (51) приспособлен для предварительного захвата, другой (52) - для фиксации стыковки.
Рукоятка может быть установлена на любом подвижном звене механизма перемещения крюка, например на валу 9.
Возможна установка защелки не в направляющей вращательного движения (ось 27), а в направляющей прямолинейного движения.
СТУ обеспечивает любой из следующих циклов стыковки-расстыковки:
стыковка вручную - расстыковка вручную;
стыковка вручную - расстыковка манипулятором;
стыковка манипулятором - расстыковка вручную;
стыковка манипулятором - расстыковка манипулятором.
Использование предлагаемого изобретения в СТУ на МКС обеспечит гибкость и оптимизацию при планировании и осуществлении такелажных и монтажных операций, уменьшит зависимость от наличия и состояния на текущий момент манипуляторов и скафандров, имеющих ограниченный ресурс и требующих время от времени ремонта или замены, а также позволит переносить и стыковать грузы в удаленные или неудобные точки МКС, недостижимые для манипуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2001 |
|
RU2220078C2 |
| СИСТЕМА УПРАВЛЕНИЯ СТЫКОВКОЙ | 2000 |
|
RU2167795C1 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| ИНСТРУМЕНТ ДЛЯ ЗАЖИМА, ПРЕИМУЩЕСТВЕННО ДЛЯ РАБОТЫ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 2003 |
|
RU2243082C2 |
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ИЗ КОСМИЧЕСКОГО АППАРАТА | 2000 |
|
RU2191148C2 |
| УСТРОЙСТВО СТЫКОВКИ РАЗВЕРТЫВАЕМЫХ МОДУЛЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2222480C2 |
| КОСМИЧЕСКАЯ СТАНЦИЯ, ПРЕИМУЩЕСТВЕННО НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2001 |
|
RU2202499C1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
Стыковочное устройство может быть использовано для установки полезного груза на корпусе космической станции c использованием манипулятора и/или от космонавта, а также при проведении подводных работ. Устройство включает в себя активную и пассивную части, а также механизм стягивания. Активная часть содержит гнездо в виде воронки, сопряженной в суженной части со стаканом, а в расширенной - с базовым кольцом. Пассивная часть выполнена в виде штыря, сужающегося от основания к головке и имеющего уступы с упорами для крюков активной части. Боковая поверхность головки охвачена стаканом гнезда, а боковая поверхность основания - базовым кольцом. Механизм стягивания содержит крюки, установленные с возможностью выдвижения и втягивания их рогов соответственно в направлении расширения или сужения воронки, и механизм перемещения крюков. Активная часть дополнительно содержит защелки предварительного захвата и защелки фиксации стыковки, которые установлены на гнезде в направляющих с возможностью перемещения их зубьев в поперечном оси стакана направлении и снабжены ограничителями перемещения. Кроме того, активная часть имеет механизмы отвода крюков при втянутом положении, механизмы отжима защелок при выдвинутом положении, фиксатор выдвинутого положения крюков и рукоятку, соединенную с одним из подвижных звеньев механизма перемещения крюков. Зубья защелок предварительного захвата размещены в отверстиях в зоне сопряжения воронки и стакана. Защелки и крюки подпружинены в направлении к оси стакана, а механизм перемещения крюков подпружинен в направлении втягивания крюков. Рога крюков размещены в продольных прорезях гнезда и имеют дополнительную степень свободы - поперек направления выдвижения. В пассивной части устройства уступы с упорами для рогов крюков расположены на головке штыря и введены впадины с упорами для зубьев защелок. Изобретение расширяет функциональные возможности и повышает надежность устройства. 6 з.п.ф-лы, 10 ил.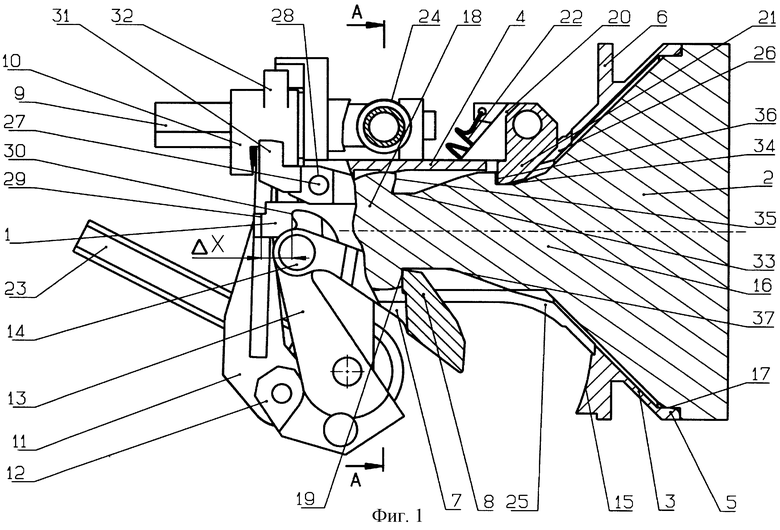
| US 4905938 A, 06.03.1990 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОПИЛЕНОКСИДА | 2010 |
|
RU2528385C2 |
| DE 3215229 A1, 27.10.1983 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 1979 |
|
SU805587A1 |

