Изобретение относится к машиностроению, а именно к испытательной технике, и может быть использовано при проектировании космических аппаратов (КА).
В космической технике среди прочих стоит задача по увеличению срока активного существования автоматических КА. При этом на современных КА возрастает потребляемая бортовой аппаратурой среднесуточная электрическая мощность. Как известно (Космические аппараты. Под общей редакцией К.П.Феоктистова, М.: Воениздат, 1993), основным источником электрической энергии на КА являются фотоэлектрические преобразователи, размещаемые на солнечной батарее (БС). Увеличение вырабатываемой среднесуточной электрической мощности может быть достигнуто за счет:
применения фотопреобразователей с улучшенными характеристиками;
увеличения площади солнечной батареи;
ориентирования панелей БС на Солнце.
Последние два способа увеличения среднесуточной электрической мощности оказывают существенное влияние на бортовой комплекс управления (БКУ) космического аппарата, так как увеличивается нагрузка на систему управления движением (СУД) КА. В связи с этим возникает необходимость как правильного выбора параметров самого привода БС и законов управления им, так и проектирования СУД КА с учетом влияния на нее солнечной батареей с приводом.
Решение данной задачи может быть выполнено теоретически, но оно требует применения сложного математического аппарата и многоитерационного расчета с поэтапным уточнением исходных данных по мере формирования требований к конструкции БС, приводу, БКУ, СУД и другим системам и получения расчетных данных в процессе разработки этих систем.
Проведение прямых испытаний с реальными БС и КА в наземных условиях практически для современных КА невозможно из-за конструктивных или иных особенностей БС (большая площадь, ажурность несущих элементов, значительные механические напряжения в элементах конструкции БС при раскрытом состоянии и т. д. ). Кроме того, БС проектируется для функционирования в условиях невесомости. Испытания с раскрытием БС в земных условиях могут быть осуществлены только после их обезвешивания, однако система обезвешивания значительно искажает динамические характеристики БС и КА в целом.
В настоящее время разработаны методики, позволяющие с высокой точностью создать математическую модель солнечных батарей, например, конечно-элементарная модель по методу Бамтона. Используя данную модель и математическую модель привода можно исследовать воздействие динамической системы "БС + привод" на КА. Однако создание математической модели привода БС является сложнейшей задачей с большим количеством случайных воздействующих факторов.
Наиболее интересны с точки зрения исследования динамики движения КА режимы одновременной работы СУД с обеспечением высоких точностных характеристик и системы ориентации панелей БС на Солнце, особенно при трогании или останове привода БС. Поскольку при разработке КА, как правило, используются существующие приводы или проектируются новые на их базе, то целесообразно использовать физико-математическое моделирование системы "БС + привод", где реальный привод используется как физическая модель, а БС как математическая модель.
Известен способ испытаний механических передач в электрическом стенде (авторское свидетельство СССР 1525525, 1987, аналог), содержащий кинематически связываемые с ведущим и ведомым валами испытуемой передачи, асинхронные машины соответственно с короткозамкнутыми и фазными роторами, заключающийся в том, что обеспечивают работу асинхронной машины с фазным ротором в режиме синхронного генератора. С целью сокращения продолжительности испытаний путем повышения точности воспроизведения нагружающего момента за счет улучшения динамических свойств при регулировании момента, создание и регулирование нагружающего момента осуществляют изменением частоты напряжения питания обмоток статора синхронной машины с короткозамкнутым ротором при неизменной частоте вращения ее ротора, которая обеспечивается асинхронной машиной с фазным ротором, работающей в режиме синхронного генератора параллельно с сетью переменного тока.
Недостатком аналога является его относительно низкая точность в случае его использования для моделирования воздействия БС с приводом на КА. Это связано с тем, что, с одной стороны, нельзя с высокой степенью точности имитировать внешнее нагружение привода, адекватное реальным условиям, из-за сложной закономерности их изменения во времени, с другой стороны, влияние самого привода на КА не учитывается вовсе.
Известен способ моделирования воздействия солнечных батарей с приводом на космический аппарат (Козлов Д.И., Аншаков Г.П., Агарков В.Ф. и др. Конструирование автоматических космических аппаратов. М.: Машиностроение, 1996, 448 с. , глава 2, прототип), включающий выбор физической модели привода, имитацию внешнего нагружения привода и суждения о результатах воздействия по величине крутящего момента. Данный способ позволяет моделировать нагрузки (в виде крутящего момента на валу привода), испытываемые приводом солнечной батареи КА при воздействии внешних возмущений. С учетом результатов моделирования уточняются параметры привода БС. При этом о влиянии солнечной батареи с приводом на КА можно судить только косвенно, используя сложный математический аппарат.
Недостатком прототипа является его относительно низкая точность моделирования воздействия солнечной батареи с приводом на КА.
Задачей изобретения является увеличение точности моделирования воздействия солнечной батареи с приводом на космический аппарат.
Указанная задача решается тем, что в известном способе моделирования воздействия солнечной батареи с приводом на космический аппарат, включающем выбор физической модели привода, имитацию внешнего нагружения, суждение о результатах воздействия по величине крутящего момента, предварительно формируют математическую модель воздействия солнечной батареи в виде циклограммы изменения крутящего момента, преобразуют ее в циклограмму изменения выходного напряжения электронно-вычислительной машины, получают на выходе электродвигателя-нагружателя адекватную модель внешнего нагружения привода, корпус привода неподвижно закрепляют к стенду, а датчик крутящего момента устанавливают между корпусом привода и стендом.
На чертеже приведена функциональная схема стенда для осуществления предлагаемого способа моделирования воздействия солнечной батареи с приводом на космический аппарат.
Стенд для осуществления способа состоит из электродвигателя-нагружателя 1, привода 2, электронно-вычислительной машины 3, датчиков крутящего момента 4 и 5, общего вала 6, установочной плиты 7, неподвижного упругого вала 8 и усилителя сигналов 9.
Датчик крутящего момента 5 установлен на валу 6 и предназначен для дополнительного контроля крутящего момента на выходе электродвигателя-нагружателя 1. Датчик крутящего момента 4 установлен на валу 8 между корпусом привода 2 и установочной плитой 7 стенда и предназначен для определения реакции всей системы на КА в виде крутящего момента. Корпус привода 2 жестко закреплен через дополнительный упругий вал 8 к установочной плите 7 стенда. Электродвигатель-нагружатель своим корпусом также жестко закреплен к установочной плите 7 стенда.
Способ осуществляется следующим образом. Предварительно формируется модель воздействия солнечной батареи в виде циклограммы изменения крутящего момента в реальном масштабе времени. Затем с помощью специальной программы превращают ее в пропорциональную циклограмму изменения выходного напряжения электронно-вычислительной машины. Затем, используя электрический усилитель 9, получают управляющий сигнал, позволяющий на выходе электродвигателя-нагружателя формировать адекватную модель внешнего нагружения привода. Одновременно с электродвигателем-нагружателем в работу включается привод. На упругих валах 6 и 8 возникают крутящие моменты, отличающиеся по величине друг от друга. Датчик 5 показывает величину и форму изменения крутящего момента электродвигателя-нагружателя, а датчик 4 регистрирует реакцию всей системы (БС + привод) на КА. Показания обоих датчиков непрерывно записываются электронно-вычислительной машиной.
Повышение точности моделирования достигается за счет высокой точности формирования математической модели воздействия БС и использования реального привода в качестве его физической модели, а также измерения крутящего момента датчиком, установленным между корпусом привода и стендом. Такая схема моделирования позволяет исследовать суммарное воздействие на КА солнечной батареи и привода, в то время как в известных способах исследовалось влияние только солнечной батареи. Кроме того, применение для моделирования электронно-вычислительной машины снимает все трудности при формировании математической модели воздействия БС.
Таким образом, применение данного способа позволит существенно повысить точность моделирования воздействия солнечной батареи с приводом на космический аппарат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2270793C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2349518C1 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2001 |
|
RU2207309C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 1999 |
|
RU2164881C1 |
| СВЕТОЗАЩИТНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 1997 |
|
RU2128134C1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2214949C1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2167793C2 |
| СФЕРИЧЕСКИЙ ГАЗОСТАТИЧЕСКИЙ ПОДШИПНИК | 2000 |
|
RU2191936C2 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2001 |
|
RU2221731C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 1999 |
|
RU2156211C1 |
Изобретение относится к испытательной технике и может быть использовано при проектировании и отработке космических аппаратов (КА). Предлагаемый способ включает выбор физической модели привода и имитацию его внешнего нагружения. О результатах воздействия солнечной батареи на КА судят по величине крутящего момента, снимаемого с датчика этого момента. При этом формируют математическую модель указанного воздействия солнечной батареи в виде циклограммы изменения крутящего момента, действующего со стороны батареи на привод. Эту циклограмму используют путем изменения выходного напряжения электронно-вычислительной машины для получения на выходе нагружающего электродвигателя адекватного закона нагружения привода. В качестве физической модели привода выбирают штатный привод батареи, и его корпус неподвижно закрепляют на стенде. Датчик крутящего момента устанавливают между корпусом привода и стендом. Такая методика испытаний позволяет более точно учесть воздействие на КА солнечной батареи вместе с ее приводом. Изобретение направлено на повышение достоверности имитации в наземных условиях рабочих режимов КА с солнечными батареями. 1 ил.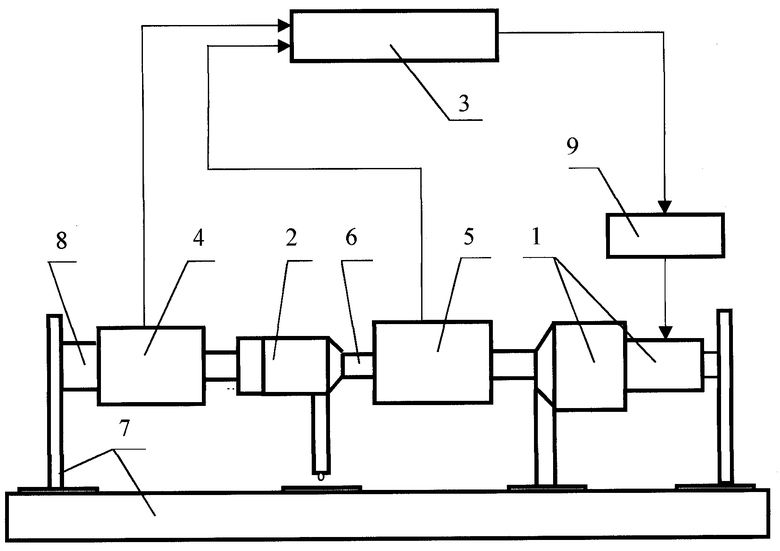
Способ моделирования воздействия солнечной батареи с приводом на космический аппарат, включающий выбор физической модели привода, имитацию внешнего нагружения привода электродвигателем-нагружателем и суждение о результатах воздействия по величине крутящего момента с датчика этого момента, отличающийся тем, что предварительно формируют математическую модель указанного воздействия солнечной батареи в виде циклограммы изменения крутящего момента, преобразуют ее в циклограмму изменения выходного напряжения электронно-вычислительной машины, получая на выходе электродвигателя-нагружателя адекватную модель внешнего нагружения привода, при этом в качестве физической модели привода выбирают сам привод и его корпус неподвижно закрепляют на стенде, а датчик крутящего момента устанавливают между корпусом привода и стендом.
| КОЗЛОВ Д.И., АНШАКОВ Г.П | |||
| и др | |||
| Конструирование автоматических КА | |||
| - М.: Машиностроение, 1996, 448 с., 2 гл | |||
| C | |||
| ROUX, P | |||
| FLAMENT | |||
| Solar array deployment simulation using ADAMS software | |||
| Proc | |||
| II European Space Mechanisms & Tribology Symp | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Meersburg, FR Germany (ESA SP-213), pp.41-46 | |||
| US 5691898 А, 25.11.1997 | |||
| US 4726582 А, 23.02.1988. | |||

