Изобретение относится к машиностроению, а именно к испытательной технике, и может быть использовано при проектировании космических аппаратов (КА).
В космической технике среди прочих стоит задача по увеличению срока активного существования автоматических КА. При этом на современных КА возрастает потребляемая бортовой аппаратурой среднесуточная электрическая мощность. Как известно (Космические аппараты. Под общей редакцией К.П.Феоктистова, М.: Воениздат, 1993), основным источником электрической энергии на КА являются фотоэлектрические преобразователи, размещаемые на солнечной батарее (БС). Увеличение вырабатываемой среднесуточной электрической мощности может быть достигнуто за счет:
применения фотопреобразователей с улучшенными характеристиками;
увеличения площади солнечной батареи;
ориентирования панелей БС на Солнце.
Последние два способа увеличения среднесуточной электрической мощности оказывают существенное влияние на бортовой комплекс управления (БКУ) космического аппарата, так как увеличивается нагрузка на систему управления движением (СУД) КА. В связи с этим возникает необходимость как правильного выбора параметров самого привода БС и законов управления им, так и проектирования СУД КА с учетом влияния на нее солнечной батареи с приводом.
Решение данной задачи может быть выполнено теоретически, но оно требует применения сложного математического аппарата и многоитерационного расчета с поэтапным уточнением исходных данных по мере формирования требований к конструкции БС, приводу, БКУ, СУД и другим системам получения расчетных данных в процессе разработки этих систем.
Проведение прямых испытаний с реальными БС и КА в наземных условиях практически для современных КА невозможно из-за конструктивных или иных особенностей БС (большая площадь, ажурность несущих элементов, значительные механические напряжения в элементах конструкции БС при раскрытом состоянии и т.д.). Кроме того, БС проектируется для функционирования в условиях невесомости. Испытания с раскрытием БС в земных условиях могут быть осуществлены только с одновременным их обезвешиванием, однако система обезвешивания значительно искажает динамические характеристики БС и КА в целом.
В настоящее время разработаны методики, позволяющие с высокой точностью создать математическую модель солнечных батарей, например конечно-элементная модель по методу Бамтона. Используя данную модель и математическую модель привода, можно исследовать воздействие динамической системы "БС + привод" на КА. Однако создание математической модели привода БС является сложнейшей задачей с большим количеством случайных воздействующих факторов.
Наиболее интересны с точки зрения исследования динамики движения КА режимы одновременной работы СУД с обеспечением высоких точностных характеристик и системы ориентации панелей БС на Солнце, особенно при трогании или останове привода БС. Поскольку при разработке КА, как правило, используются существующие приводы или проектируются новые на их базе, то целесообразно использовать физико-математическое моделирование системы "БС + привод", где реальный привод используется как физическая модель, а БС как математическая модель.
Известен стенд для исследования механических коробок передач, содержащий кинематически соединяемые с ведущим и ведомым валами исследуемой передачи привод и нагружатель, выполненый в виде электрического тормоза с обмоткой возбуждения, подключенный к последней выходом регулируемый источник постоянного тока, включающий электромеханический регулятор напряжения, датчики момента, установленные на выходных валах привода и нагружателя, регулирующее устройство с программным блоком (патент РФ №2105279, аналог).
Данный стенд решает сходные задачи, но применяется только для исследования характеристик передач при статическом нагружении и не имеет функциональных возможностей как для исследования электродинамических характеристик электроприводов, так и для моделирования воздействия солнечной батареи с приводом на КА.
Известна информационно-вычислительная система контроля технического состояния электроприводов специального назначения типа ВСКС. 441.3 72.001 (испытательное оборудование, пояснительная записка ШАКТ.0000-0 ПЗ, ЦСКБ, г.Самара, 2000 г.), содержащий физическую модель привода с блоком питания, кинематически соединенный составной вал, электродвигатель нагружатель с регулируемым источником питания, неподвижную платформу, узлы крепления привода и нагружателя к платформе, датчиковую аппаратуру, электронно-вычислительную машину.
На чертеже показано устройство, в котором известная информационно-вычислительная система контроля технического состояния электроприводов (ИВСКТС) состоит из исследуемого привода (физической модели привода) 1 (на чертеже редуктор привода не показан), электродвигателя-нагружателя 2 (на чертеже редуктор нагружателя не показан), кинематически соединенного составного вала 3, узлов крепления 4, 5 соответственно привода 1 и нагружателя 2, измерительной аппаратуры 6, 7 соответственно для измерения крутящего момента и угла поворота вала, фланцев 8, 9 для кинематического соединения составных частей вала 3, блока питания 10 привода 1, регулируемого источника питания 11 нагружателя 2, электронно-вычислительной машины 12 и неподвижной платформы 13.
Составные части вала 3 соответственно закрепляются на подшипниках привода 1, нагружателя 2 и кинематически соединяются между собой фланцами или муфтой (на чертеже муфта не показана). В результате образуется механическая система, позволяющая передавать внешнее нагружение, моделируемое с помощью нагружателя 2 и регулируемого источника питания 11, на выход привода 1. Внешнее нагружение характеризуется крутящим моментом.
Для проверки работоспособности привода как технического устройства и проведения его ресурсных испытаний, крутящий момент задается или в виде постоянного момента (статическое нагружение), или в виде синусоидальной зависимости (динамическое нагружение). При этом регистрация крутящего момента и угла поворота вала 3 осуществляется с помощью измерительной аппаратуры с последующей записью и обработкой их значений электронно-вычислительной машиной 12.
К числу достоинств прототипа относится его простота и относительно низкая себестоимость.
Известна конструкция стенда, описанная в способе для моделирования воздействия солнечной батареи с приводом на космический аппарат, включающий выбор физической модели привода, имитацию внешнего нагружения привода и суждение о результатах воздействия по величине крутящего момента. С целью повышения точности моделирования предварительно формируют математическую модель воздействия солнечной батареи в виде циклограммы изменения крутящего момента, преобразуют ее в циклограмму изменения выходного напряжения электронно-вычислительной машины, получают на выходе электродвигателя-нагружателя адекватную модель внешнего нагружения привода, корпус привода неподвижно закрепляют к стенду, а датчик крутящего момента устанавливают между корпусом привода и стендом (патент РФ №2196088, прототип).
В известном устройстве предложенная схема моделирования позволяет исследовать суммарное воздействие на КА солнечной батареи и привода, однако не понятно, каким образом на точность моделирования практически влияет упругий вал датчика крутящего момента, установленного между корпусом привода и стендом.
Задачей изобретения является увеличение точности моделирования воздействия солнечной батареи с приводом на космический аппарат.
Указанная задача решается тем, что в известном стенде для моделирования воздействия солнечной батареи с приводом на космический аппарат, содержащем физическую модель привода с блоком питания, имитатор внешнего нагружения привода в виде электродвигателя-нагружателя с регулируемым источником питания, составной вал, соединяющий кинематически физическую модель привода и электродвигатель-нагружатель, измерительную аппаратуру для регистрации крутящего момента на выходе электродвигателя-нагружателя и угла поворота вала, электронно-вычислительную машину для обработки сигналов измерительной аппаратуры, установочную плиту с узлами крепления к ней физической модели привода и электродвигателя-нагружателя, в качестве физической модели используется реальный привод, при этом стенд оснащен дополнительным измерителем крутящего момента, установленным между корпусом привода и стендом, причем корпус привода через упругий вал, выполненый в виде чувствительного элемента, закреплен к установочной плите, упругий вал дополнительного измерителя крутящего момента выполнен в виде радиальной рессоры и упора, закрепленного на корпусе привода, при этом рессора закреплена одним концом жестко к установочной плите и образует с упором упругий вал, а выход дополнительного измерителя крутящего момента соединен со входом электронно-вычислительной машины.
На чертеже показано предлагаемое устройство стенда для моделирования воздействия солнечной батареи с приводом на космический аппарат.
Он состоит из привода 1 (на чертеже редуктор привода не показан), электродвигателя-нагружателя 2, составного вала 3, узла крепления 4, нагружателя 2, узла крепления 5 привода 1, измерителя крутящего момента 6, измерителя угла поворота 7 вала 3, фланцевого соединения 8, сильфонной муфты 9, блока питания 10 привода 1, регулируемого источника питания 11 электродвигателя-нагружателя 2, электронно-вычислительной машины 12, установочной плиты 13, дополнительного измерителя крутящего момента 14, имеющего чувствительный элемент в виде радиальной рессоры 15, упора 16, закрепленного на корпусе привода. Рессора 15 закреплена одним концом жестко к установочной плите 13 и образует с упором 16 упругий вал. Корпус привода 1 и корпус дополнительного измерителя крутящего момента 14 посредством подшипников 17 соединены между собой, образуя одну степень свободы (вращение вокруг продольной оси вала). Выход электронно-вычислительной машины 12 соединен электрически с входом регулируемого источника питания 11, при этом регулируемый источник питания 11 может быть расположен внутри электродвигателя-нагружателя 2. Подбирая соответствующие коэффициенты регулируемого источника питания 11, можно получить на выходе электродвигателя-нагружателя 2 адекватную модель внешнего нагружения привода. Выходное напряжение электронно-вычислительной машины 12 по форме и амплитуде задается пакетом программ 18, реализующим предварительно сформированную математическую модель воздействия солнечной батареи в виде циклограмм изменения крутящего момента.
Измеритель крутящего момента 6 регистрирует крутящий момент, развиваемый электродвигателем-нагружателем 2, измеритель угла поворота 7 используется для определения скорости вращения вала 3, измеритель крутящего момента 14 определяет реакцию всей системы (в виде крутящего момента) на космический аппарат. Сигналы со всех измерителей обрабатываются с помощью электронно-вычислительной машины 12. Рессора 15 при работе стенда изгибается на некоторый угол, пропорциональный величине возникающего крутящего момента. Значение крутящего момента фиксируется с помощью датчика зазора (на чертеже не показано).
Моделирование воздействия солнечной батареи с приводом на космический аппарат осуществляется следующим образом.
Предварительно формируется модель воздействия солнечной батареи в виде циклограммы изменения крутящего момента в реальном масштабе времени. Затем с помощью пакета программ превращают ее в циклограмму изменения выходного напряжения электронно-вычислительной машины 12. Далее, используя регулируемый источник питания 11 с заданным коэффициентом усиления, получают управляющий сигнал, позволяющий на выходе электродвигателя-нагружателя 2 формировать адекватную модель внешнего нагружения привода. В качестве физической модели выбирают реальный привод, который одновременно с электродвигателем-нагружателем включается в работу. С измерителя крутящего момента 6 снимают сигнал, показывающий характер изменения крутящего момента сопротивления во времени, а с дополнительного измерителя крутящего момента 14 - характер изменения реакции на корпус КА во времени от системы "солнечная батарея + привод". Показания всех измерителей записываются электронно-вычислительной машиной 12 и используются в качестве выходных данных моделирования.
Эффект от использования предложенного стенда для моделирования заключается в том, что упругий вал выполнен в виде упора и радиальной рессоры, которая для каждого поддиапазона крутящего момента выбирается своя, рассчитывается на каждый конкретный поддиапазон, позволяет существенно повысить точность моделирования воздействия солнечной батареи с приводом на КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2000 |
|
RU2196088C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2349518C1 |
| СТЕНД С ЗАМКНУТЫМ СИЛОВЫМ КОНТУРОМ ДЛЯ ИСПЫТАНИЙ ВЕДУЩИХ МОСТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2178878C2 |
| Автоматизированное рабочее место для исследований и испытания систем электропитания космических аппаратов | 2015 |
|
RU2609619C2 |
| Стенд для испытания муфт | 1990 |
|
SU1763925A1 |
| СПОСОБ ПАРИРОВАНИЯ ПЕРЕГРУЗОК ПО ТОКУ В ЭЛЕКТРОННОМ БЛОКЕ КОСМИЧЕСКОГО АППАРАТА, ОБУСЛОВЛЕННЫХ ВНЕШНИМИ ВОЗДЕЙСТВУЮЩИМИ ФАКТОРАМИ, ВКЛЮЧАЯ ТИРИСТОРНЫЙ ЭФФЕКТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599089C1 |
| СТЕНД ДЛЯ ВЫТЯЖКИ РЕМНЕЙ ДВУХ ПЕРЕДАЧ ПО СХЕМЕ ЗАМКНУТОГО КОНТУРА | 2015 |
|
RU2620759C1 |
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2394218C2 |
| Стенд для испытания агрегатов транспортного средства | 1985 |
|
SU1364943A1 |
| Стенд для испытания карданных передач | 1988 |
|
SU1508121A1 |
Изобретение относится к испытательной технике и может быть использовано при проектировании и отработке космических аппаратов. Предлагаемый стенд содержит электродвигатель-нагружатель, связанный через составной вал со штатным приводом солнечной батареи, измерители крутящего момента на выходе электродвигателя и угла поворота вала. Между стендом и корпусом привода установлен дополнительный измеритель крутящего момента с чувствительным упругим элементом, выход которого соединен со входом ЭВМ. Корпус привода через этот чувствительный упругий элемент прикреплен к установочной плите. Данный чувствительный элемент выполнен в виде радиальной рессоры и упора, закрепленного на корпусе привода, причем рессора прикреплена одним концом жестко к установочной плите и образует с упором упругий вал. Рессора может быть выбрана для каждого частного диапазона крутящего момента на упругом валу датчика. Технический результат изобретения состоит в повышении точности моделирования воздействия солнечной батареи с приводом на космический аппарат. 1 ил.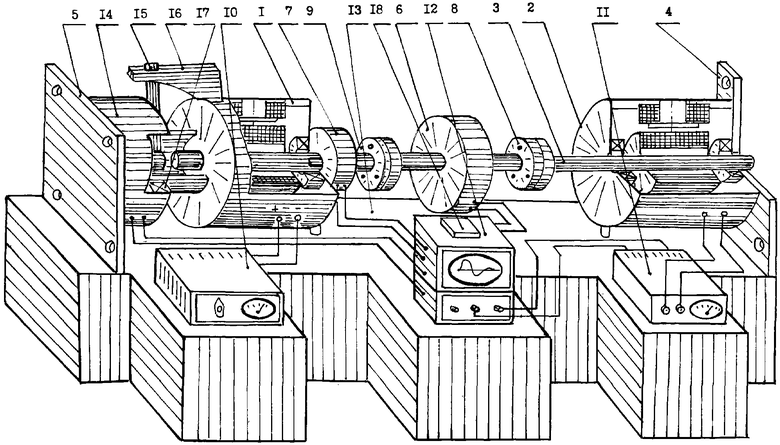
Стенд для моделирования воздействия солнечной батареи с приводом на космический аппарат, содержащий физическую модель привода с блоком питания, имитатор внешнего нагружения привода в виде электродвигателя-нагружателя с регулируемым источником питания, составной вал, кинематически соединяющий физическую модель привода и электродвигатель-нагружатель, измерительную аппаратуру для регистрации крутящего момента на выходе электродвигателя-нагружателя и угла поворота вала, электронно-вычислительную машину для обработки сигналов измерительной аппаратуры, установочную плиту с узлами крепления к ней физической модели привода и электродвигателя-нагружателя, причем в качестве указанной физической модели использован реальный привод, между стендом и корпусом привода установлен дополнительный измеритель крутящего момента с чувствительным упругим элементом, выход которого соединен со входом электронно-вычислительной машины, а корпус привода через этот чувствительный упругий элемент прикреплен к установочной плите, отличающийся тем, что указанный чувствительный упругий элемент выполнен в виде радиальной рессоры и упора, закрепленного на корпусе привода, причем рессора прикреплена одним концом жестко к установочной плите и образует с упором упругий вал.
| СПОСОБ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2000 |
|
RU2196088C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ МЕХАНИЧЕСКИХ КОРОБОК ПЕРЕДАЧ | 1991 |
|
RU2105279C1 |
| US 5691898 A, 25.11.1997 | |||
| US 4726582 A, 23.02.1988. | |||

