Изобретение относится к измерительной технике и может применяться при экспериментальных исследованиях напряженно-деформированного состояния конструкций при нормальных температурах.
Одной из основных задач, которые необходимо решать при разработке многоточечных измерительных систем с целью уменьшения погрешностей измерения относительных деформаций, является учет влияния сопротивления линий связи от датчика до коммутатора и измерительного устройства и коммутирующих ключей, с помощью которых датчик через коммутатор подключается к измерительному устройству.
Ранее разрабатывались приборы и системы, в которых на входе измерительного устройства ставили тензометрический мост, в одно из плеч которого через линии связи подключался тензорезистор. Потом были разработаны другие типы входных цепей.
Погрешность из-за влияния ключевых элементов, с помощью которых тензорезистор подсоединялся к измерительному устройству, удалось значительно уменьшить в мостовых схемах для релейных ключевых элементов, а в четырехпроводных схемах - даже для ключевых элементов на микросхемах.
Влияние линий связи также удалось значительно снизить при четырехпроводном подключении тензорезисторов. При трехпроводном подсоединении тензорезисторов уменьшается погрешность от изменения сопротивлений линий связи при испытаниях конструкций с нагревом, но систематическая погрешность из-за наличия линий связи не исключается.
При проведении статических испытаний без нагревания конструкции температура окружающей среды за время проведения испытаний остается неизменной, поэтому сопротивление линий связи остается неизменным и можно применять подсоединение тензорезисторов к коммутаторам датчиков по двухпроводной схеме.
Известен способ измерения относительных деформаций конструкций при подключении тензорезисторов к тензометрической системе, реализуемый в измерительной системе СИД (Т)-ЦВС (см. Баранов А.Н., Белозеров Л.Г., Ильин Ю.С., Кутьинов В.Ф. Статические испытания на прочность сверхзвуковых самолетов. М., Машиностроение, 1974 г., стр. 313-315).
В системе одиночные тензорезисторы подсоединяют по двух- или трехпроводной схеме к тензометрическим мостам, которые располагают в коммутаторах датчиков первой ступени. Выходы коммутаторов первой ступени соединяют со входами коммутатора второй ступени, выходы которого соединяют со входом усилителя на несущей частоте. Питание датчиков осуществляют синусоидальным напряжением частотой 5кГц.
Аналоговый сигнал после усиления и демодуляции преобразуют в цифровую форму в аналого-цифровом преобразователе и передают на ЭВМ. В системе предусмотрена автоматическая балансировка начального разбаланса моста из-за технологического разброса сопротивлений тензорезисторов относительно номинального значения 120 Ом. Для того чтобы при двухпроводном подсоединении тензорезисторов показания не выходили за шкалу измерительного устройства в смежное с тензорезистором плечо моста, устанавливали резистор, сопротивление которого равно номинальному сопротивлению линий связи от тензорезистора до коммутатора.
Недостаток известного способа двухпроводного подсоединения тензорезисторов состоит в том, что не исключается погрешность из-за наличия линий связи, из-за которой измеренная относительная деформация была занижена. Кроме того, при отклонении сопротивления линий связи от номинального значения появляется дополнительная погрешность, обусловленная применением линий связи от коммутатора до датчика, отличающихся в пределах технологических допусков на изготовление от номинальной длины 20 м.
Известен способ измерения относительных деформаций конструкций при подключении тензорезисторов к тензометрической системе, реализуемый в измерительной системе СИИТ-3 (см. 1. Система измерительная тензометрическая СИИТ-3. Руководство по эксплуатации 4Т2.739004РЭ. Краснодарский завод тензометрических приборов; 2. М.Л. Датчик, Н.И. Пригоровский, Г.Х. Хуршудов. Методы и средства натурной тензометрии. Справочник. М., Машиностроение, 1989 г., стр. 61-62).
В системе единичные тензорезисторы подсоединяют по двух- и трехпроводной схеме к тензометрическому мосту. При двухпроводном подсоединении тензорезисторов предусмотрена возможность подключения одного компенсационного тензорезистора на 10 или 100 активных. Тензорезисторы подсоединяют к измерительному устройству через коммутатор. С помощью измерительного устройства преобразуют выходной сигнал тензорезисторов в электрическое напряжение, которое затем усиливают и преобразуют в цифровую форму. Цифровую информацию выводят на цифропечатающее устройство или с помощью интерфейсной платы выводят на ЭВМ. Питание датчиков осуществляют прямоугольными импульсами частотой 2,5 кГц.
Недостаток известного способа двухпроводного подключения заключается в том, что систематическая погрешность от влияния сопротивлений линий связи, хотя и уменьшается в два раза по сравнению со способом подключения тензорезисторов в системе СИД(Т)-ЦВС, но полностью не исключается.
Кроме того, применение выносимого к тензорезисторам компенсационного тензорезистора, предназначенного для уменьшения рассматриваемой погрешности, приводит к необходимости применения дополнительных тензорезисторов и проводов при монтаже тензорезисторов на конструкции и повышает трудоемкость монтажа.
Известен способ измерения относительных деформаций конструкций при подключении тензорезисторов к тензометрической системе, реализуемый в измерительной системе К742 (см. 1. Система измерительная информационная К742. Техническое описание и инструкция по эксплуатации. ЗПИ.487.059ТО, 1983 г., ВНИИЭП.; 2. М.Л. Датчик, Н.И. Пригоровский, Г.Х. Хуршудов. Методы и средства натурной тензометрии. Справочник. М., Машиностроение, 1989 г., стр. 64-65). Система разработана ВНИИЭП и выпускалась на Омском заводе "Электроточприбор". В системе тензорезисторы подсоединяют к коммутаторам датчиков по четырехпроводной схеме. Коммутаторы датчиков также соединяют с измерительным устройством по четырехпроводной схеме. Питание датчиков осуществляют импульсами тока прямоугольной формы. В системе измеряют отклонение сопротивления каждого тензорезистора относительно величины сопротивления опорного резистора. Далее путем вычисления определяют величину относительной деформации на каждом i-м этапе нагружения конструкции при проведении статических испытаний по формуле:
где ΔRi - приращение сопротивления тензорезистора на i-м этапе нагружения конструкции относительно сопротивления опорного резистора, равного номинальному сопротивлению тензорезисторов, подсоединенных к системе;
Rgo - начальное сопротивление тензорезистора при нагрузке, равной нулю;
Величина Rgo равна сумме номинального сопротивления тензорезисторов Rн и величине сопротивления технологического допуска на изготовление;
S - чувствительность тензорезистора.
Четырехпроводное подсоединение тензорезисторов обеспечивает исключение погрешности измерения из-за изменения сопротивления линий связи и ключевых элементов, с помощью которых тензорезисторы подсоединяют к коммутатору.
Недостаток четырехпроводного подсоединения тензорезисторов к коммутаторам датчиков по сравнению с двухпроводным состоит в неэкономичном использовании кабелей датчиков, т.к. при этом используется не менее чем в 2 раза большее количество жил в кабелях. Кроме того, при двухпроводном подсоединении тензорезисторов вместо четырехпроводного в значение Rgo войдут сопротивления проводов и величины εi, вычисленные по результатам измерений (будут меньше истинных).
Известен способ измерения относительных деформаций конструкций при подключении тензорезисторов к тензометрической системе, реализуемый в измерительной системе "Прочность" (прототип) (см. 1. Авторское свид-во СССР 381875, М. кл. G 01 B 7/18, G 01 D 5/14.
2. Информационно-измерительная система "Прочность". Труды ЦАГИ, вып. 2105, 1981 г., стр. 5-76).
В системе тензорезисторы подсоединяют к коммутаторам датчиков по четырехпроводной схеме. Измерительное устройство системы содержит компенсационный преобразователь, два входных трансформатора, делитель напряжения и нуль-орган. Кроме того, устройство снабжено резистором, включенным последовательно с компенсационным преобразователем, и дополнительным трансформатором, первичная обмотка которого соединена с резистором, две вторичные обмотки соединены с первичными обмотками входных трансформаторов, вторичные обмотки которых соединены последовательно-встречно и связаны с входом нуль-органа, а выход делителя напряжения соединен последовательно с первичной обмоткой входного трансформатора, подключенного ко входу устройства.
В качестве компенсационного преобразователя (опорного резистора) используют тензорезистор, наклеенный на металлическую пластину. Питание тензорезисторов осуществляют импульсами тока прямоугольной формы.
Способ измерения относительных деформаций конструкции при четырехпроводном подсоединении тензорезисторов к коммутатору датчиков системы осуществляют следующим образом. К коммутатору датчиков подсоединяют магазин сопротивлений по четырехпроводной схеме. В ЭВМ вводят программу регистрации результатов измерений.
Непрерывно опрашивают канал коммутатора, к которому подсоединен магазин сопротивлений, и, вращая курбели магазина сопротивлений, добиваются, чтобы показания на экране дисплея ЭВМ стали равными нулю. С магазина сопротивлений считывают измеренную величину сопротивления. Она равна величине сопротивления Rк опорного резистора. Магазин сопротивлений отсоединяют от коммутатора. К коммутатору подсоединяют предварительно прошедший метрологическую поверку тензокалибратор. В ЭВМ вводят программу метрологической поверки и проводят метрологическую поверку системы. По результатам поверки ЭВМ вычисляют функцию преобразования
y=А0+А1х,
где х - приращение сопротивления резисторов тензокалибратора на i-й ступени.
А0, А1 - коэффициенты преобразования.
Величина А0 определяется смещением "нуля" измерительного устройства, ее устанавливают равной нулю. Величина А1 определяется коэффициентом усиления измерительного устройства.
При тензометрии используется величина А1, которую обозначим А. Отсоединяют от коммутатора тензокалибратор и подсоединяют к коммутатору кабели датчиков с тензорезисторами, наклеенными на исследуемую конструкцию и подсоединенными по четырехпроводной схеме. В ЭВМ вводят величины S, А и Rк, вводят программу для измерения приращений сопротивлений тензорезисторов относительно опорного резистора и вычисления по результатам измерений относительной деформации конструкции для каждого тензорезистора. Проводят статические испытания конструкции.
На каждом этапе нагружения конструкции измеряют приращение напряжения ΔUi = iΔRi, где i - величина тока, протекающего через тензорезистор и опорный резистор, ΔRi - приращение сопротивления тензорезистора на i-й ступени нагружения конструкции. Величину ΔUi преобразуют в аналого-цифровом преобразователе в значение Ni. По результатам измерений ЭВМ вычисляет величину относительной деформации на i-й ступени нагружения конструкции
где Ni - измеренное значение отклонения сопротивления тензорезистора от величины сопротивления опорного резистора на i-й ступени нагружения конструкции;
No - то же, при величине нагрузки, равной нулю;
S - тензочувствительность тензорезистора;
А - коэффициент преобразования - тангенс угла наклона линейной зависимости показаний системы к оси приращения сопротивлений;
Rк - сопротивление опорного резистора, оно выбирается равным номинальному сопротивлению тензорезисторов, подключенных к коммутаторам датчиков.
Недостатком четырехпроводного подключения тензорезисторов по сравнению с двухпроводным в условиях неизменяющихся комнатных температур является избыточность жил в кабелях от датчиков до коммутаторов не менее чем в 2 раза. Кроме того, избыточный вес кабелей датчиков утяжеляет исследуемую конструкцию (например, самолет) и требует дополнительных мер по уравновешиванию конструкции при проведении статических испытаний.
Кроме того, если использовать при двухпроводном подсоединении тензорезисторов формулу вычисления относительной деформации для четырехпроводного подсоединения, то из-за неучета сопротивления линий связи появится погрешность, равная
где 2rл - сопротивления двух проходов от тензорезистора до коммутатора датчиков, Rgo - начальное сопротивление тензорезистора при нагрузке, равной нулю.
Задачей изобретения является повышение точности и уменьшение не менее чем в 2 раза количества жил в кабелях датчиков при двухпроводном вместо четырехпроводного подключения тензорезисторов к коммутаторам датчиков тензометрических систем, измеряющих отклонения сопротивлений тензорезисторов от величины сопротивления опорного резистора.
Техническим результатом изобретения является исключение влияния сопротивлений линий связи не величину относительной деформации конструкции при двухпроводном подсоединении тензорезисторов к коммутаторам датчиков тензометрических систем, измеряющих отклонения сопротивлений тензорезисторов от величины сопротивления опорного резистора.
Технический результат достигается тем, что в способе измерения относительных деформаций конструкций при подключении к тензометрической системе, заключающемся в том, что кабели датчиков подсоединяют к разъемам коммутатора по четырехпроводной схеме, измеряют отклонения сопротивлений тензорезисторов от величины сопротивления опорного резистора, проводят метрологическую поверку системы, определяют коэффициент преобразования и измеряют величину сопротивления опорного резистора, в измерительной системе кабели датчиков подсоединяют к тензорезисторам по двухпроводной схеме, измеряют сопротивление соединительных проводов, устанавливают величину опорного резистора, равную сумме номинального сопротивления тензорезистора и сопротивления соединительных проводов от тензорезистора до коммутатора, по измеренным значениям на каждой ступени нагружения конструкции определяют величину относительной деформации по формуле
где Ni - измеренное значение отклонения сопротивления тензорезистора от величины сопротивления опорного резистора на i-й ступени нагружения конструкции;
No - то же, при величине нагрузки, равной нулю;
S - тензочувствительность тензорезистора,
A - коэффициент преобразования, определенный по результатам метрологической поверки системы;
rл - величина сопротивления одного соединительного провода от тензорезистора до коммутатора датчиков.
На чертеже представлена блок-схема тензометрической системы для осуществления способа.
В состав системы вводят тензорезисторы 1-3, магазин сопротивлений 4, тензокалибратор 5, коммутатор датчиков 6, модуль измерительный системный 7, ЭВМ 8.
Тензорезисторы 1-3 подсоединяют к коммутатору датчиков 6 по двухпроводной схеме. Величина сопротивления каждого провода равна rл. В разъемах соединительные линии распаивают по четырехпроводной схеме, как показано на чертеже. Коммутатор 6 предназначен для четырехпроводного подсоединения тензорезисторов. Коммутатор 6 может быть многоступенчатым и конструктивно состоять из отдельных блоков.
Выход коммутатора 6 соединен со входом модуля измерительного системного 7 кабелем по четырехпроводной схеме. Управление коммутатором 6 для поочередного подключения тензорезисторов к модулю 7 осуществляется модулем 7 по программе, реализуемой ЭВМ 8. Тензокалибратор 5 подсоединяют по четырехпроводной схеме к коммутатору 6 вместо тензорезисторов 1-3. Тензокалибратор 5 должен обеспечивать автоматическое ступенчатое изменение сопротивлений резисторов в пределах
(Rн+2rл)±ΔRmax,
где Rн - номинальное значение сопротивлений тензорезисторов, подключаемых к системе;
rл - величина сопротивления одного провода при двухпроводном подсоединении тензорезисторов к коммутатору датчиков;
ΔRmax - максимальная величина приращения сопротивления резисторов, соответствующая диапазону измерения системы.
Управление тензокалибратором осуществляет модуль 7 по программе метрологической поверки, введенной в ЭВМ 8. Модуль 7 соединен с ЭВМ 8 кабелями. Сопротивление опорного резистора Rк в измерительном модуле 7 устанавливают равным сумме номинального сопротивления тензорезисторов Rн, подключаемых к коммутатору 6, и величине сопротивления проводов 2rл, с помощью которых тензорезистор подсоединяется к коммутатору датчиков 6.
Величина 2rл измеряется прибором или вычисляется для конкретного типа кабелей датчиков.
Погрешность измерения относительной деформации из-за изменения сопротивлений линий связи тензорезисторов к коммутаторам датчиков равна
Вывод формулы приведен в приложении 1.
Например, если Rgo=100 Ом; номинальная длина кабеля датчиков 20 м; сопротивление 2rл=2 Ом, то величина 2Δrл=0,1 Ом соответствует длине кабеля датчиков на 1 м больше номинальной, а погрешность при этом равна δ≈0,1%.
Таким образом, для исключения погрешности измерения относительной деформации из-за влияния линий связи необходимо брать кабели датчиков одной длины или учитывать сопротивление кабелей датчиков, длина которых отличается от номинальной величины.
Модуль осуществляет функции: электропитания тензорезисторов 1-3 и резисторов калибратора 5 током прямоугольной формы, измерения аналоговых сигналов от тензорезисторов и тензокалибратора, преобразования аналоговых сигналов в цифровые, передачу измеренных сигналов в цифровом виде через интерфейс в ЭВМ 8, прием через интерфейс от ЭВМ 8 сигналов управления, формирование сигналов управления калибратором 5 и коммутатором 6.
ЭВМ 8, кроме перечисленных функций, осуществляет запоминание исходных данных для управления системой и обработки результатов измерений, обработку и представление результатов измерений в виде таблиц и графиков.
Система с помощью блоков 6-8 описана функционально. Реально, каждая конкретная система имеет свою структурную схему, в которой блоки 6-8 могут состоять из подблоков, которые имеют свои принципиальные схемы и соединены в соответствии с технической документацией на систему. Для реализации предлагаемого способа все эти системы подходят, если выполняются следующие условия: коммутатор датчиков предназначен для подсоединения тензорезисторов по четырехпроводной схеме; измеряется отклонение сопротивления тензорезисторов относительно величины сопротивления опорного резистора, размещенного в измерительном устройстве; исключается влияние емкостей линий связи на точность измерения при максимальном быстродействии системы, для чего питание тензорезисторов осуществляется импульсами тока прямоугольной формы.
Способ осуществляют следующим образом. К коммутатору датчиков 6 подсоединяют магазин сопротивлений 4 (типа Р 4831) по четырехпроводной схеме. В ЭВМ 8 вводит программу регистрации результатов измерений. Непрерывно опрашивают канал коммутатора, к которому подсоединен магазин сопротивлений, и, вращая курбели магазина сопротивления, добиваются, чтобы показания на экране дисплея ЭВМ 8 стали равными нулю. С магазина сопротивлений считывают измеренную величину сопротивления. Она равна величине сопротивления Rк опорного резистора, которое установили в измерительном модуле 7. Магазин сопротивлений отсоединяют от коммутатора 6. К коммутатору 6 на место отсоединенного магазина сопротивлений 4 подсоединяют кабель датчиков для двухпроводного подсоединения тензорезисторов и вместо тензорезистора подсоединяют магазин сопротивлений. На магазине сопротивлений устанавливают величину сопротивления, равную сопротивлению опорного резистора Rк, и, вращая курбели, добиваются, чтобы показания на дисплее ЭВМ 8 были равными нулю. Считывают величину измеренного сопротивления, она равна Rк-2rл. Отсоединяют кабель датчиков. К коммутатору 6 подсоединяют по четырехпроводной схеме предварительно прошедший метрологическую поверку калибратор 5. В ЭВМ 8 вводят программу метрологической поверки и проводят метрологическую поверку системы. По результатам поверки ЭВМ 8 вычисляет функцию преобразования y=А0+А1х, где х - приращение сопротивления резисторов тензокалибратора на i-й ступени, А0, А1 - коэффициенты преобразования.
Поскольку в дальнейшем измеряется величина относительной деформации, то используется только коэффициент А1, который обозначим А. Величина А0, равная нулю, устанавливается регулировкой нуля измерительного модуля 7. Отсоединяют от коммутатора 6 калибратор 5 и подсоединяют к коммутатору 6 кабели датчиков с тензорезисторами 1-3, наклеенными на исследуемую конструкцию. В ЭВМ 8 вводят величины S, A, (Rк-2rл), вводят программу для измерения приращений сопротивлений тензорезисторов относительно опорного резистора и проводят вычисления по их результатам относительной деформации. Проводят статические испытания конструкции, при которых измеряют отклонения величины сопротивлений тензорезисторов 1-3 относительно опорного резистора на каждом этапе нагружения конструкции. По результатам измерений ЭВМ 8 вычисляет величину относительной деформации конструкции для каждого тензорезистора на каждом этапе нагружения конструкции по формуле (3).
Применение предлагаемого способа дает экономию кабельной продукции и материалов не менее чем в 2 раза, уменьшает вес измерительной системы, снижает затраты на ее изготовление и повышает точность измерения относительных деформаций.
Изобретение относится к измерительной технике и может применяться при экспериментальных исследованиях напряженно-деформированного состояния конструкций при нормальных температурах. Способ заключается в том, что кабели датчиков подсоединяют к разъемам коммутатора измерительной системы по четырехпроводной схеме, измеряют отклонения сопротивлений тензорезисторов от величины сопротивления опорного резистора измерительного устройства, проводят метрологическую поверку системы, определяют коэффициент преобразования и измеряют величину сопротивления опорного резистора, при этом кабели датчиков подсоединяют к тензорезисторам по двухпроводной схеме, измеряют сопротивление соединительных проводов, устанавливают величину опорного резистора, равную сумме номинального сопротивления тензорезистора и сопротивления соединительных проводов от тензорезистора до коммутатора. По измеренным значениям на каждой ступени нагружения конструкции определяют величину относительной деформации. Изобретение позволяет снизить затраты на изготовление измерительной системы и повышает ее точность. 1 ил.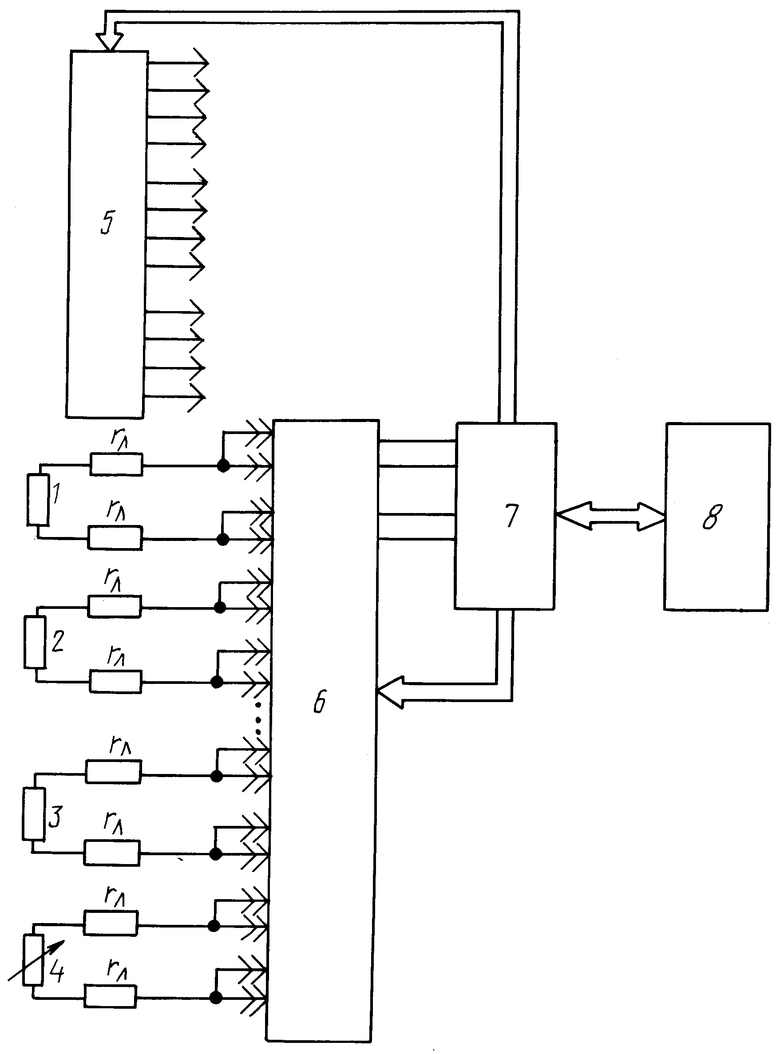
Способ измерения относительных деформаций конструкций при подключении тензорезисторов к тензометрической системе, заключающийся в том, что кабели датчиков подсоединяют к разъемам коммутатора по четырехпроводной схеме, измеряют отклонения сопротивлений тензорезисторов от величины сопротивления опорного резистора, проводят метрологическую поверку системы, определяют коэффициент преобразования и измеряют величину сопротивления опорного резистора, отличающийся тем, что кабели датчиков подсоединяют к тензорезисторам по двухпроводной схеме, измеряют сопротивления соединительных проводов, устанавливают величину опорного резистора, равную сумме номинального сопротивления тензорезистора и сопротивления соединительных проводов от тензорезистора до коммутатора, по измеренным значениям на каждой ступени нагружения конструкции определяют величину относительной деформации по формуле
где Ni - измеренное значение отклонения суммарного сопротивления тензорезистора и соединительных проводов от величины сопротивления опорного резистора Rк на i-й ступени нагружения конструкции;
No - измеренное значение отклонения суммарного сопротивления тензорезистора и соединительных проводов от величины сопротивления опорного резистора Rк при величине нагрузки на конструкцию равной нулю;
S - тензочувствительность тензорезистора;
rл - величина сопротивления одного соединительного провода от тензорезистора до коммутатора датчиков;
А - коэффициент преобразования - тангенс угла наклона линейной зависимости показаний системы к оси приращения сопротивлений.
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СИГНАЛОВ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 0 |
|
SU381875A1 |
| RU 2066043, 27.08.1996 | |||
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2031356C1 |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ПОЛУЧЕНИЯ ИСКУССТВЕННОГО КАМНЯ | 2010 |
|
RU2448058C1 |
| US 4337665, 06.07.1982. | |||

