Изобретение относится к плазменной технике и может быть использовано при конструировании ускорителей и на их основе электроракетных двигателей (ЭРД), в частности плазменных ускорителей с замкнутым дрейфом электронов и ионных ускорителей, предназначенных для работы в космических условиях для межорбитальной транспортировки, а также выполнения задач коррекции орбиты и ориентации космических аппаратов, и может найти применение в других областях техники, например в электронике для ионной очистки, фрезеровки, получения покрытий различного функционального назначения, в вакуумной металлургии для совершенствования и модификации поверхностных характеристик металлов, а также и других областях техники.
Известно устройство, представляющее собой плазменный ускоритель (двигатель) с замкнутым дрейфом электронов (или ускоритель холловского типа), который в зависимости от токопроводящих свойств материала стенок ускорительного канала может иметь две разновидности конструктивного выполнения: стационарный плазменный двигатель (СПД) - материал стенок - диэлектрик и двигатель с анодным слоем (ДАС) - материал стенок проводник (Плазменные ускорители и ионные инжекторы. М., "Наука", 1984, стр. 107-138).
Ускорение ионов в таком устройстве (двигателе или ускорителе) происходит благодаря приложенному вдоль оси ускорительного канала электрического поля, при этом перпендикулярно электрическому полю прикладывают магнитное поле, величина которого такова, что в зоне ускорения электроны оказываются замагниченными, а ионы - нет. Таким образом, в разряде, осуществляющемся в скрещенных электрическом и магнитном полях, продольное движение электронов затруднено и ток переносится в основном ионами. Ускорение ионов происходит в условиях квазинейтральности плазмы.
Недостатки этого устройства (и способа его работы) связаны с тем, что, во-первых, двигатель эффективно работает лишь на номинальном режиме по мощности (т.е. при номинальных значениях тока и напряжения, а следовательно, и тяги) и, во-вторых, создает тягу только в фиксированном направлении. Таким образом, двигатель является однорежимным, а поэтому отсутствует возможность изменять мощность и тягу (например, в случае возникновения проблем с источником электропитания, его деградации или в целях управления космическим аппаратом), а для поворота вектора тяги при управлении космическим аппаратом необходимо использовать дополнительный механизм поворота двигателя относительно аппарата. Поворачивающий (шарнирный) механизм тяжел, сложен и ненадежен, увеличивает вес аппарата, уменьшает полезный объем. Кроме того, невозможность изменения вектора тяги по величине и направлению затрудняет предварительную технологическую отработку и доводку двигателя на этапе его создания, не позволяет осуществлять компенсацию неточностей изготовления, а потому ужесточает требования при его изготовлении и, тем самым, увеличивает стоимость изделия.
Известно устройство, представляющее собой ионный ускоритель (двигатель), который в зависимости от способа ионизации рабочего тела может иметь несколько разновидностей конструктивного выполнения (С.Д. Гришин и др. Электрические ракетные двигатели. М., "Машиностроение", 1975, стр. 60-116): ионный двигатель с объемной ионизацией, с поверхностной ионизацией и с ионизацией в ВЧ-разряде.
Ускорение ионов в таком устройстве (двигателе или ускорителе) происходит также благодаря приложенному вдоль оси ускорительного канала электрического поля, однако здесь ускорение чисто электростатическое, т.е. в отсутствие квазинейтральности.
Этот тип электроракетного двигателя имеет аналогичные недостатки, а именно двигатель эффективно работает лишь на номинальном режиме по мощности (следовательно, и тяги) и создает тягу только в фиксированном направлении. Таким образом, двигатель является однорежимным, а поэтому отсутствует возможность изменять мощность и тягу, а для поворота вектора тяги при управлении космическим аппаратом необходимо использовать дополнительный механизм поворота двигателя относительно аппарата.
Ближайшим техническим решением является электроракетный двигатель на основе плазменного ускорителя с замкнутым дрейфом электронов, содержащий осесимметричный канал для ионизации рабочего тела и ускорения ионов, снабженный системой подвода рабочего тела в область закрытого конца канала, и по крайней мере один катод для нейтрализации истекающего ионного пучка, размещенный вне канала у его открытого конца (Патент РФ 2088802 от 09.12.1995, МКИ F 03 H 1/00, Н 05 Н 1/54). В этом устройстве поворот вектора тяги осуществляют созданием азимутальной неоднородности параметров в ускорительном канале путем совместного воздействия трех факторов - геометрического (переменное по азимуту расстояние между внутренней и внешней стенками канала), электрического (дополнительные электроды, установленные у выходного среза последовательно один за другим по азимуту) и магнитного (магнитная система содержит независимые секции, размещенные последовательно одна за другой по азимуту). Изменение величины вектора тяги (что связано с изменением потребляемой мощности и/или соотношения тока и напряжения - так можно изменять удельный импульс) осуществляют либо изменением напряжения питания двигателя, либо изменением тока разряда (путем изменения расхода рабочего тела). В первом случае ток разряда (а значит, и ток в магнитных катушках) почти не меняется, а потому магнитное поле остается постоянным. Это объясняется тем, что в этом устройстве источники магнитодвижущей силы, обеспечивающие номинальный режим работы, как правило, выполнены в виде магнитных катушек, включенных последовательно с разрядом. Независимое питание катушек возможно, однако оно усложняет двигатель, затрудняет запуск двигателя или создает опасность перехода разряда в дуговой в случае запоздалого включения катушек при запуске, а потому и чаще всего не используется. Во втором случае величина магнитного поля изменяется пропорционально разрядному току. Очевидно, что допустима и комбинация этих возможностей.
Недостатками данного устройства (и реализуемого в нем способа регулирования вектора тяги) являются узкие возможности по изменению режима работы двигателя, т.е. малая регулируемость двигателя. Это касается и поворота вектора тяги, и изменения величины вектора тяги. Увеличение угла поворота вектора тяги больше чем на три градуса приводит к резкому ухудшению характеристик двигателя (возникновение колебаний, снижение кпд). При переходе на новый уровень (режим) мощности, что необходимо для изменения величины вектора тяги, магнитное поле отклоняется от оптимального значения, т.е. от значения, соответствующего новому уровню мощности (и/или новому соотношению между током и напряжением), а потому эффективность двигателя падает - снижается кпд, возрастают колебания, изменяется угол расходимости струи, может возрасти скорость эрозии стенок канала и т.д. Кроме того, схема этого двигателя такова, что оптимизация его параметров при отработке и доводке затруднена, а также невозможна простая коррекция двигателя при обнаружении неточностей производства (изготовления).
Техническим результатом предлагаемого технического решения является значительное расширение возможностей по эффективному регулированию режима работы электроракетного двигателя для обеспечения необходимых характеристик вектора тяги (направления и абсолютной величины), а именно - увеличение диапазона отклонения вектора тяги при сохранении остальных параметров двигателя на прежнем уровне, а также повышение эффективности работы двигателя (увеличение кпд, снижение колебаний, оптимизация угла расходимости струи и скорости эрозии стенок канала и т.д.) в широком диапазоне мощностей (т.е. величин вектора тяги), при этом обеспечивается расширение возможностей при предварительной технологической отработке по оптимизации параметров устройства и повышению его мощности, а также компенсации неточностей изготовления двигателя.
Технический результат достигается тем, что в способе регулирования вектора тяги электроракетного двигателя, в котором изменяют мощность двигателя и направление действия вектора тяги, для получения тягового усилия включают одновременно группу из k источников тяги в количестве от 1 до m, где m≥2, причем векторы по крайней мере двух из m источников тяги прикладывают не параллельно оси двигателя, а для получения необходимых результирующих величин модуля и направления действия вектора тяги при регулировании изменяют количество k одновременно работающих источников тяги в группах, где k≤m, состав групп одновременно работающих источников тяги и длительность действия каждой группы, а электроракетный двигатель, содержащий осесимметричный канал для ионизации рабочего тела и ускорения ионов, снабженный системой подвода рабочего тела в область закрытого конца канала, и по крайней мере один катод для нейтрализации истекающего ионного пучка, размещенный вне канала у его открытого конца, дополнительно снабжен по крайней мере одним идентичным каналом для ионизации и ускорения, при этом каналы выполнены с автономными системами подвода рабочего тела, оси каналов расположены симметрично относительно оси двигателя, образуя с ней одинаковые углы, причем оси каналов наклонены к оси двигателя под углами, обеспечивающими истечение ускоренного потока в направлении к оси двигателя, причем по крайней мере один катод расположен в приосевой зоне двигателя между каналами у их открытых концов, причем каналы выполнены в виде независимых ускорителей.
Изобретение иллюстрируется чертежом, где показан вариант схемы выполнения электроракетного двигателя типа СПД.
Электроракетный двигатель содержит осесимметричный канал 1 для ионизации и ускорения, ограниченный внутренней 2 и внешней 3 стенками. Анод 4 расположен в канале в области его закрытого конца. Анод 4 одновременно выполняет и роль коллектора-газораспределителя. Магнитная система состоит из внутренней и внешней подсистем, каждая из которых включает соответственно магнитопровод 5 и 6, полюс 7 и 8, источник магнитодвижущей силы 9 и 10. Катод 11 расположен вне канала у его открытого конца. Ось 12 канала наклонена к оси 13 двигателя под углом α≠0.
Область пространства кольцевого канала 1, примыкающая к аноду-газораспределителю 4 (т. е. к закрытому концу канала), представляет собой зону ионизации, область вблизи выходного среза (т.е. примыкающая к открытому концу канала) - зону ускорения.
В нижней части схемы чертежа (ниже оси 13) показан идентичный осесимметричный канал для ионизации и ускорения с осью 12'.
Анод 4 имеет специальный подвод рабочего тела 14 (или 14' в идентичном канале), т.е. анод-газораспределитель 4 и подвод 14 представляют собой элементы системы подвода рабочего тела.
Двигатель работает следующим образом.
Рабочее тело, например, ксенон, через подвод рабочего тела 14 и анод-газораспределитель 4, выполненный с множеством равномерно распределенных по азимуту отверстий, подают в канал 1, образованный внутренней 2 и внешней 3 стенками, выполненными, например из керамики на основе нитрида бора. Между анодом 4, изготовленным из тугоплавкого металла, например молибдена, и катодом 11, выполненным, например, в виде полого катода с эффективным термоэмиттером, например из гексаборида лантана, в рабочем теле зажигают разряд. С помощью источников магнитодвижущей силы 9 и 10, выполненных, например, в виде катушек, полюсов 7 и 8, магнитопроводов 5 и 6 формируют в канале симметричное относительно оси канала магнитное поле с максимумом в зоне ускорения в области выходного среза и с силовыми линиями, лежащими в основном в плоскости, перпендикулярной оси 12 канала. Полюса 7, 8 и магнитопроводы 5, 6 выполнены из магнитомягкого материала. Величина максимума магнитного поля такова, что обеспечивает замагниченность электронов в зоне ускорения и затрудняет их свободное перемещение к аноду 4, поэтому основной ток разряда в скрещенных электрическом и магнитном полях переносится ионами. Ускоренные в разряде ионы выходят из канала 1, их заряд нейтрализуется электронами, эмитируемыми катодом 11, и вместе они образуют плазменную струю, создающую тягу, вектор которой направлен по оси 12 канала, т.е. под углом α к оси 13 двигателя.
Если одновременно функционируют два канала, смещенные по азимуту относительно друг друга на 180o, то суммарная тяга будет направлена по оси 13 электроракетного двигателя. Для осуществления поворота вектора тяги на угол α (или создания импульса тяги в боковом направлении) необходимо прекратить работу одного из каналов, используя автономные (не связанные друг с другом) подводы рабочего тела 14 и 14'. Поворот вектора тяги (или создание бокового импульса тяги) на любой меньший угол можно осуществлять двумя путями: 1) при одновременной работе двух каналов на различных уровнях тяги (мощности), т.е. используя форсирование, или дросселирование, или то и другое одновременно; 2) при работе двух каналов на одинаковых уровнях тяги, но с различной продолжительностью (временем) функционирования каждого.
Если поворот необходимо осуществлять только в одной плоскости, то достаточно иметь всего два канала (m=2) для ионизации и ускорения с автономными системами подвода рабочего тела, причем направления действия векторов тяги этих каналов не параллельны оси двигателя (наклонены к ней под углом α).
Очевидно, что для осуществления поворота вектора тяги в любом направлении достаточно трех (но может быть и больше m≥3) независимых разнесенных по азимуту каналов.
Для управления космическим аппаратом достаточно осуществлять поворот вектора тяги на угол, не превышающий 5o. Тогда угол α может быть равен 5o, это приводит к потере абсолютной величины тяги (когда поворот не осуществляется) всего в 0,4% (cos 5o=0,996), что вполне приемлемо. Но α может быть и более 10o(cos 10o= 0,985), в этом случае поворот может быть осуществлен на больший угол.
Для того чтобы уменьшить угол расходимости истекающей струи, оси 12 и 12' каналов наклонены к оси 13 двигателя таким образом, чтобы истекающие потоки заряженных частиц были направлены к оси двигателя.
В режиме работы двигателя, когда поворот вектора не нужен, могут функционировать все каналы одновременно (группа из k источников тяги, где k=m), при этом двигатель развивает максимальную тягу (мощность). В таком режиме работы тяга может быть изменена в некоторых пределах за счет форсирования или дросселирования одновременно всех каналов, правда, в этом случае каждый канал будет работать не в оптимальных условиях. Более значительное изменение (уменьшение) тяги может быть получено при последовательной работе каналов по одному (k=1) или по два (k=2) и т.д. одновременно с одинаковой длительностью (временем функционирования), при этом каждый канал работает в оптимальном (номинальном) режиме.
Таким образом, рассматриваемый электроракетный двигатель, который можно назвать поликанальным, позволяет изменять вектор тяги как по величине, так и по направлению, при этом сохраняется высокая эффективность двигателя, т.к. каждый канал всегда работает в оптимальном режиме. Базироваться такой двигатель может на СПД (как в приведенном примере), ДАС, ионном двигателе. Большим достоинством такого двигателя является то, что не требуются предварительная специальная отработка и доводка на поворот вектора тяги, облегчается отработка двигателя большой мощности, т.к. достаточно испытаний и отработки отдельных каналов, снижаются требования на отклонение вектора тяги канала от оси канала.
Подобный результат можно получить, используя связку отдельных одноканальных ускорителей (двигателей), но такой подход менее предпочтителен по ряду причин: появляется проигрыш (по сравнению с поликанальным двигателем) в весе, габаритах, прочности, надежности и др. Например, ионные и холловского типа двигатели обычно снабжаются двумя катодами (дублирование); тогда для связки из четырех двигателей потребуется восемь катодов, но для поликанального двигателя с четырьмя каналами достаточно будет иметь лишь четыре катода (а возможно, два или три широкодиапазонных катода), которые удобно компонуются в центре двигателя. Тем не менее в конкретной ситуации может быть приемлем вариант, когда используется связка из автономных ускорителей.
В результате предложенное техническое решение позволяет существенно повысить эффективность электроракетного двигателя при использовании его в широком диапазоне мощностей (в частности, токов) и при реализации процедуры поворота вектора тяги (увеличение угла поворота без ухудшения других характеристик). Двигатель становится многорежимным при сохранении высоких качеств (максимальный кпд, низкий уровень колебаний, малая скорость эрозии, оптимальный угол расходимости струи и т.д.). Такой двигатель может быть использован на космических аппаратах одновременно как для выполнения транспортных задач, так и в целях управления, стабилизации и коррекции, а также удобен для компенсации неточностей изготовления двигателя и в других целях. Двигатель может эффективно использоваться на сложных траекториях полета космического аппарата при оптимальном изменении параметров двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСКОРЕНИЯ ИОНОВ В ПЛАЗМЕННЫХ УСКОРИТЕЛЯХ ХОЛЛОВСКОГО ТИПА | 2000 |
|
RU2196397C2 |
| СПОСОБ УСКОРЕНИЯ ИОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2162624C1 |
| ХОЛЛОВСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2088802C1 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ | 1996 |
|
RU2119275C1 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 2010 |
|
RU2447625C2 |
| ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 2017 |
|
RU2668588C2 |
| Ионный ракетный двигатель космического аппарата | 2018 |
|
RU2682962C1 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ | 1996 |
|
RU2092983C1 |
| Прямоточный релятивистский двигатель | 2020 |
|
RU2776324C1 |
| Стационарный плазменный двигатель | 1991 |
|
SU1796777A1 |
Изобретение относится к плазменной технике и может быть использовано при конструировании электроракетных двигателей, в частности двигателей на основе плазменных ускорителей с замкнутым дрейфом электронов и ионных ускорителей, предназначенных для работы в космических условиях для межорбитальной транспортировки, а также выполнения задач коррекции орбиты и ориентации космических аппаратов, и может найти применение в других областях техники, например в электронике для ионной очистки, фрезеровки, получения покрытий различного функционального назначения, в вакуумной металлургии. Электроракетный двигатель содержит ускорительный канал для ионизации рабочего тела и ускорения ионов, снабженный системой подвода рабочего тела в область закрытого конца канала, в которую входят коллектор-газораспределитель (одновременно выполняющий роль анода) и специальный подвод рабочего тела. Катод расположен вне канала у его открытого конца. Дополнительно двигатель снабжен по крайней мере одним идентичным ускорительным каналом, а оси каналов расположены симметрично относительно оси двигателя, образуя с ней одинаковые углы. Таких каналов может быть два или больше, а двигатель можно назвать поликанальным. Каналы могут быть выполнены в виде независимых ускорителей. Для получения тягового усилия включают одновременно группу из k источников тяги (каналов) в количестве от 1 до m, где m≥2, а для получения необходимых результирующих величин модуля и направления действия вектора тяги при регулировании изменяют количество k одновременно работающих источников тяги в группах, где k≤m, состав групп одновременно работающих источников тяги и длительность действия каждой группы. Технический результат: изобретение существенно расширяет возможности по эффективному регулированию вектора тяги электроракетного двигателя, который становится многорежимным при сохранении высоких качеств. 2 с. и 3 з.п. ф-лы, 1 ил.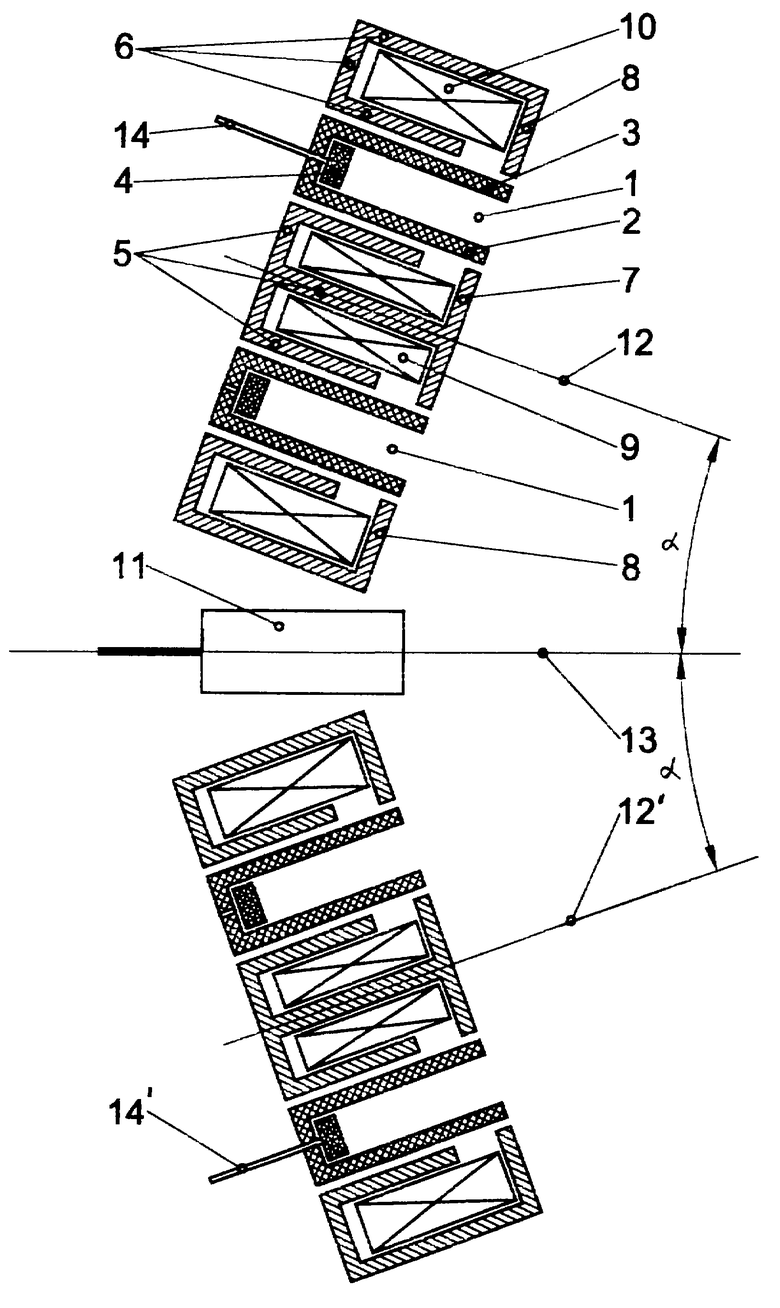
| ПОЛИКАНАЛЬНЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1992 |
|
RU2008525C1 |
| ХОЛЛОВСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2088802C1 |
| СПОСОБ ПОЛУЧЕНИЯ И УСКОРЕНИЯ ПЛАЗМЫ И УСКОРИТЕЛЬ ПЛАЗМЫ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2156555C1 |
| СПОСОБ УСКОРЕНИЯ ИОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2162624C1 |
| WO 00/42827 A1, 20.07.2000 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Способ селективного контроля глубины и качества поверхностного упрочнения изделий из ферромагнитных материалов | 2022 |
|
RU2782884C1 |

