Область техники, к которой относится изобретение
Изобретение относится в основном к сотовым системам связи. В частности, настоящее изобретение относится к новому улучшенному способу передачи обслуживания между базовыми станциями различных сотовых систем.
Уровень техники
Использование способов модуляции режима множественного доступа с кодовым разделением каналов (МДКР) является одним из методов обеспечения связи при большом количестве пользователей системы. Известны и другие способы, такие как множественный доступ с временным разделением каналов (МДВР) и множественный доступ с частотным разделением каналов (МДЧР), однако МДКР имеет значительные преимущества по сравнению с этими и другими способами модуляции. Использование способа МДКР в системах связи с множественным доступом раскрыто в Патенте США 4901307 на "Систему связи множественного доступа с расширенным спектром, использующую спутниковые или наземные ретрансляторы", права на который принадлежат владельцу прав на настоящее изобретение.
В упомянутом патенте описан способ множественного доступа, при котором большое количество пользователей мобильной телефонной системы, каждый из которых имеет приемопередатчик (подвижная станция), осуществляет связь через спутниковые ретрансляторы или наземные базовые станции (базовые станции или сотовые узлы) с использованием сигналов связи с расширенным спектром МДКР. При осуществлении связи в режиме МДКР частотный спектр может многократно использоваться. В результате реализации способов МДКР обеспечивается более высокая спектральная эффективность, чем та, которая может быть достигнута при использовании других способов множественного доступа, что позволяет увеличить пропускную способность для пользователей системы.
Обычные сотовые телефонные системы с ЧМ (частотная модуляция), которые используются в Соединенных Штатах, известны под названием "Усовершенствованная мобильная телефонная служба", (AMPS), которые детально описаны в Стандарте Ассоциации электронной промышленности EIA/TIA-553 "Mobile Station - Land Station Compatibility Specification" (Спецификация совместимости "подвижная станция - наземная станция"). В такой обычной сотовой телефонной системе с ЧМ имеющаяся частотная полоса делится на каналы обычно шириной 30 килогерц (кГц). Зона обслуживания системы разделяется географически на зоны обслуживания базовых станций, размер которых может варьироваться. Имеющиеся частотные каналы подразделяются на группы. Зонами обслуживания назначаются частотные группы таким образом, чтобы минимизировать вероятность помех от соседнего канала. Например, рассмотрим систему, в которой имеется семь частотных групп, а зоны обслуживания представляют собой шестиугольники равного размера. Частотная группа, используемая в одной зоне обслуживания, не используется в шести ближайших соседних зонах обслуживания.
В известных сотовых системах, чтобы обеспечить сохранение соединения связи, когда подвижная станция пересекает границу между зонами обслуживания двух разных базовых станций, используется схема передачи обслуживания. В системе AMPS передача обслуживания с одной базовой станции на другую инициируется, когда приемник активной базовой станции, обрабатывающей вызов, замечает, что уровень сигнала, принимаемого от подвижной станции, упал ниже заранее заданного порогового значения. Индикация о низком уровне сигнала подразумевает, что подвижная станция должна находится недалеко от границы зоны обслуживания базовой станции. Если уровень сигнала упал ниже заранее заданного порогового значения, то активная базовая станция запрашивает системный контроллер с целью определить, принимает ли соседняя базовая станция сигнал от этой подвижной станции с более высоким уровнем сигнала, чем текущая базовая станция.
Системный контроллер в ответ на запрос активной базовой станции посылает сообщения на соседние базовые станции с запросом на передачу обслуживания. Каждая из базовых станций, являющаяся соседней по отношению к действующей базовой станции, использует специальный сканирующий приемник, который ведет поиск сигнала от подвижной станции на том канале, на котором она работает. Если одна из соседних базовых станций сообщает системному контроллеру о достаточном уровне сигнала, то предпринимается попытка передачи обслуживания этой соседней базовой станции, которая отмечается как базовая станция назначения. Затем путем выбора холостого канала из группы каналов, используемых в базовой станции назначения, инициируется передача обслуживания. На подвижную станцию посылается управляющее сообщение, предписывающее ей переключиться с текущего канала на новый канал, поддерживаемый базовой станцией назначения. В то же самое время системный контроллер переключает сеанс связи с активной базовой станции на базовую станцию назначения. Эту процедуру называют "жесткой передачей обслуживания". Термин "жесткая" используется для определения процедуры передачи обслуживания, определяемой по принципу прерывания прежнего соединения до установления нового соединения.
В обычной системе, если передача обслуживания на базовую станцию назначения оказалась безуспешной, сеанс связи теряется (то есть прерывается). Имеется множество причин, по которым жесткая передача обслуживания может оказаться неудачной. Передача обслуживания может потерпеть неудачу, если на базовой станции назначения отсутствует незанятый канал. Передача обслуживания также может потерпеть неудачу, если одна из соседних базовых станций сообщает о приеме сигнала от данной подвижной станции, когда в действительности базовая станция принимает сигнал другой подвижной станции, использующей для связи с отдаленной базовой станцией тот же самый канал. Такое ошибочное сообщение приводит к переключению сеанса связи не на ту базовую станцию, в типовом случае - на станцию, в которой уровень сигнала от действующей подвижной станции недостаточен для поддержания связи. Кроме того, передача обслуживания будет неудачной, если подвижная станция не приняла команду на переключение каналов. Реальный опыт эксплуатации показывает, что отказы при передаче обслуживания появляются часто, что значительно снижает надежность системы.
Другая известная проблема в существующей телефонной системе AMPS возникает тогда, когда подвижная станция в течение продолжительного периода времени находится в районе границы между двумя зонами обслуживания. В этой ситуации уровень сигнала имеет тенденцию флуктуировать по отношению к каждой базовой станции, когда подвижная станция изменяет свое положение либо когда внутри зоны обслуживания изменяют свое положение иные отражающие объекты и объекты, вызывающие ослабление сигнала. Флуктуации уровня сигнала могут привести к "пинг-понговой" ситуации, когда между двумя базовыми станциями туда и обратно выполняются повторяющиеся запросы на передачу обслуживания для данного сеанса. Такие дополнительные ненужные передачи обслуживания увеличивают вероятность того, что вызов будет непреднамеренно прерван. Кроме того, повторяющиеся передачи обслуживания, даже если они и успешны, могут неблагоприятно сказаться на качестве сигнала.
В Патенте США 5101501 на "Способ обеспечения гибкой передачи обслуживания при осуществлении связи в сотовой телефонной системе МДКР и систему для его осуществления", выданном 31 марта 1992, права на который принадлежат владельцу прав на настоящее изобретение, раскрыты способ и система для обеспечения связи с подвижной станцией посредством более чем одной базовой станции при передаче обслуживания для сеанса в системе МДКР. При использовании такого типа передачи обслуживания связь в сотовой системе при передаче обслуживания с активной базовой станции на базовую станцию назначения не прерывается. Такой тип передачи обслуживания можно определить как "гибкую" передачу обслуживания, при которой, до того как будет закончена связь с первой активной базовой станцией, параллельно устанавливается связь с базовой станцией назначения, которая становится второй активной базовой станцией.
Улучшенный способ гибкой передачи обслуживания раскрыт в Патенте США 5267261 на "Гибкую передачу обслуживания, поддерживаемую мобильной станцией в сотовой системе МДКР" от 30 ноября 1993 (именуемый далее "патент '261"), права на который также принадлежат владельцу прав на настоящее изобретение. В системе по патенту '261 процесс гибкой передачи обслуживания управляется на основе измерений на подвижной станции уровня пилот-сигналов, передаваемых каждой базовой станцией в системе. Эти измерения уровня пилот-сигналов поддерживают выполнение процесса гибкой передачи обслуживания посредством обеспечения идентификации базовых станций, приемлемых в качестве кандидатов для передачи обслуживания.
Гибкая передача обслуживания, поддерживаемая подвижной станцией, действует на основе уровня пилот-сигнала нескольких групп базовых станций, измеряемого подвижной станцией. Активная Группа - это группа базовых станций, через которые установлена активная связь. Соседняя Группа - это группа базовых станций, окружающих активную базовую станцию, которая включает в себя базовые станции, имеющие высокую вероятность того, что их уровень сигнала достаточен для установления связи. Группа Кандидатов - это группа базовых станций, имеющих уровень пилот-сигнала, достаточный для установления связи. Остальная Группа - это группа базовых станций, которые не являются членами Активной Группы, Группы Кандидатов или Соседней Группы.
При установлении связи подвижная станция сначала осуществляет связь через первую базовую станцию, а Действующая группа содержит только эту первую базовую станцию. Подвижная станция осуществляет непрерывный контроль уровня пилот-сигнала базовых станций из Активной Группы, Группы Кандидатов и Соседней Группы. Когда пилот-сигнал базовой станции в Соседней Группе превысит заранее заданный пороговый уровень П_ДОБ, эта базовая станция добавляется в Группу Кандидатов и исключается из Соседней Группы в подвижной станции. Подвижная станция посылает сообщение на первую базовую станцию, идентифицируя новую базовую станцию. Системный контроллер решает, надо ли установить связь между новой базовой станцией и подвижной станцией. Если системный контроллер решает эту связь установить, то он посылает сообщение на новую базовую станцию вместе с идентифицирующей информацией о подвижной станции и командой на установление с ней связи. Также через первую базовую станцию передается сообщение и на подвижную станцию. Это сообщение идентифицирует новую Активную Группу, которая содержит первую и новую базовые станции. Подвижная станция осуществляет поиск информационного сигнала, передаваемого новой базовой станцией, и связь с новой базовой станцией устанавливается без прекращения связи через первую базовую станцию. Этот процесс может продолжаться и с дополнительными базовыми станциями.
Когда подвижная станция осуществляет связь через множество базовых станций, она продолжает контролировать уровень сигнала базовых станций из Активной Группы, Группы Кандидатов и Соседней Группы. Если уровень сигнала, соответствующий базовой станции из Активной Группы, падает на заранее заданный временной интервал П_ВПАД ниже заранее заданного порога П_ПАД, то подвижная станция сформирует и передаст сообщение, уведомляющее об этом событии. Системный контроллер примет это сообщение через по меньшей мере одну из базовых станций, с которыми подвижная станция осуществляет связь. Системный контроллер может принять решение прекратить связь через базовую станцию, имеющую низкий уровень пилот-сигнала.
Приняв решение о прекращении связи через базовую станцию системный контроллер формирует сообщение, идентифицирующее новую Активную Группу базовых станций. Новая Активная Группа не содержит базовую станцию, через которую должна быть прекращена связь. Базовые станции, через которые устанавливается связь, посылают сообщение на подвижную станцию. Системный контроллер также передает информацию на базовую станцию для прекращения связи с подвижной станцией. Таким образом, маршрутизация связи подвижной станции осуществляется только через базовые станции, идентифицированные в новой Активной Группе.
Сообщение, посылаемое из подвижной станции на базовую станцию, содержащее информацию пилот-сигналов членов Группы Кандидатов и Активной Группы, называют сообщением об измерениях уровней пилот-сигналов (СИУПС). СИУПС посылается подвижной станцией либо в ответ на запрос от базовой станции, либо потому, что уровень сигнала базовой станции из Соседней Группы превысил порог, либо уровень сигнала базовой станции в Группе Кандидатов превысил уровень одной из базовых станций из Активной Группы на заранее заданную величину, либо уровень сигнала, соответствующий базовой станции из Активной Группы, упал ниже заранее заданного порога П_ПАД на заранее заданный временной интервал П_ВПАД.
Процесс гибкой передачи обслуживания управляется четырьмя параметрами. Во-первых, порог обнаружения пилот-сигнала П_ДОБ определяет, выше какого уровня должен подняться пилот-сигнал базовой станции, являющейся членом Соседней Группы, чтобы ее можно было классифицировать как члена Группы Кандидатов. Порог падения пилот-сигнала П_ПАД определяет уровень, до которого должен снизиться уровень пилот-сигнала базовой станции, являющейся членом Активной Группы или Группы Кандидатов, для того, чтобы запустить таймер. Продолжительность работы запущенного таймера определяет П_ВПАД. По истечении времени, определяемого П_ВПАД, если уровень пилот-сигнала будет оставаться ниже уровня П_ _ПАД, подвижная станция инициирует удаление соответствующей базовой станции из группы, к которой она в данный момент принадлежит. Порог сравнения Активной Группы с Группой Кандидатов П_СРАВ устанавливает величину, на которую уровень пилот-сигнала члена Группы Кандидатов должен превышать уровень пилот-сигнала члена Активной Группы, чтобы запустить СИУПС. Каждый из этих четырех параметров храниться в подвижной станции. Каждый из этих четырех параметров может быть перепрограммирован на новое значение с помощью сообщения, посланного от базовой станции.
Хотя вышеописанные способы хорошо подходят для передачи вызовов между базовыми станциями в одной и той же сотовой системе, которая управляется одним и тем же системным контроллером, более трудная ситуация возникает при перемещении подвижной станции в зону, обслуживаемую базовой станцией, управляемой другим контроллером. Когда передача обслуживания должна быть выполнена между базовыми станциями, управляемыми разными контроллерами, то такую передачу обслуживания называют межсистемной передачей обслуживания. Одним из усложняющих ситуацию факторов в таких межсистемных передачах обслуживания является то обстоятельство, что в типовом случае отсутствует прямая линия связи между базовыми станциями первой системы и системным контроллером второй системы и наоборот. Это мешает двум системам во время передачи обслуживания одновременно осуществлять связь подвижной станции через более чем одну базовую станцию. Даже когда для содействия межсистемной гибкой передачи обслуживания между этими двумя системами доступна межсистемная линия связи, часто процесс гибкой передачи обслуживания дополнительно усложняется из-за неодинаковых характеристик двух систем.
Когда недоступны ресурсы для выполнения межсистемных гибких передач обслуживания, то выполнение "жесткой" передачи обслуживания по сеансу связи от одной системы к другой становится существенным условием, если обслуживание должно поддерживаться непрерывным. Межсистемная передача обслуживания должна выполняться в момент времени и в месте, в которых наиболее вероятно обслуживание успешной передачи соединения по вызову. Отсюда следует, что попытка передачи обслуживания должна предприниматься только тогда, когда, например:
(i) на базовой станции назначения имеется в наличии холостой канал,
(ii) подвижная станция находится внутри зоны действия базовой станции назначения и активной базовой станции и
(iii) подвижная станция находится в месте, где ей обеспечен прием команды на переключение каналов.
В идеальном случае каждая такая межсистемная жесткая передача обслуживания должна производится таким образом, чтобы минимизировать возможность "пинг-понга" (перебрасывания туда и обратно) запросов на передачу обслуживания между базовыми станциями различных систем.
Эти и другие недостатки существующих методов межсистемной передачи обслуживания ухудшают качество сотовой связи и могут дополнительно ухудшить рабочие характеристики по мере продолжения распространения конкурирующих сотовых систем. Соответственно, имеется потребность в способе межсистемной передачи обслуживания, который обеспечивает возможность надежного выполнения передачи обслуживания по вызову между базовыми станциями разных систем.
Сущность изобретения
В настоящем изобретении для облегчения жесткой передачи обслуживания от первой базовой станции, управляемой контроллером первой системы, на вторую базовую станцию, управляемую контроллером второй системы, используют две совместно расположенные базовые станции. Обе базовые станции обеспечивают по существу одну и ту же зону обслуживания, следовательно, жесткая передача обслуживания от одной станции к другой в любом месте внутри зоны обслуживания будет предположительно надежной. Две базовые станции используют ПШ (псевдошумовые) коды, сдвинутые относительно друг друга на заранее заданную величину, так что подвижные станции в общей зоне обслуживания могут различать эти два сигнала. Для того чтобы уменьшить величину взаимных помех между базовыми станциями, одна из двух базовых станций назначается базовой станцией, обеспечивающей обслуживание, а другая назначается базовой станцией, обеспечивающей прохождение. Базовая станция, обеспечивающая обслуживание, обеспечивает обслуживание множества подвижных станций внутри зоны обслуживания. Базовая станция, обеспечивающая прохождение, используется для перехода подвижных станций из одной системы в другую. Обслуживание через базовую станцию, обеспечивающую прохождение, получают только те подвижные станции, которые входят в общую зону обслуживания из системы, управляемой контроллером, который управляет базовой станцией, обеспечивающей прохождение, и те подвижные станции, которые собираются выйти из общей зоны обслуживания и войти в систему, управляемую контроллером, который управляет базовой станцией, обеспечивающей прохождение. Все другие подвижные станции обслуживаются через базовую станцию, обеспечивающую обслуживание.
Краткое описание чертежей
Признаки, цели и преимущества настоящего изобретения очевидны из нижеследующего подробного его описания, приводимого с чертежами, на которых одинаковые позиции обозначают соответствующие элементы и на которых:
Фиг. 1 - схема сотовой системы, соответствующей беспроводному абонентскому шлейфу, системе персональной связи или беспроводной системе типа учрежденческой телефонной станции с исходящей и входящей связью;
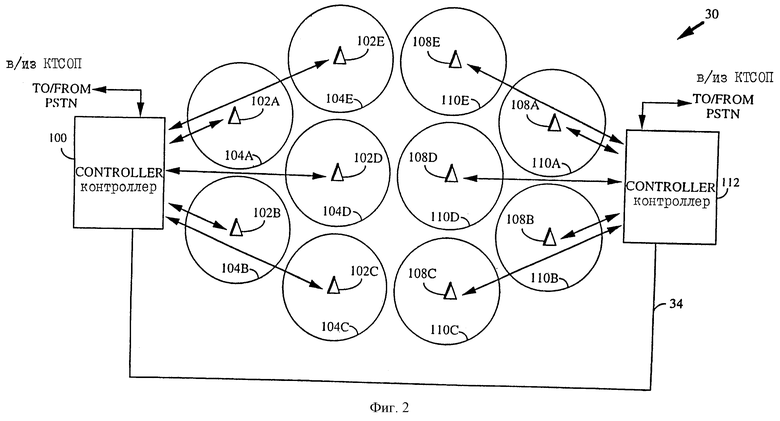
Фиг.2 - сотовая сеть связи, содержащая первую и вторую сотовую систему;
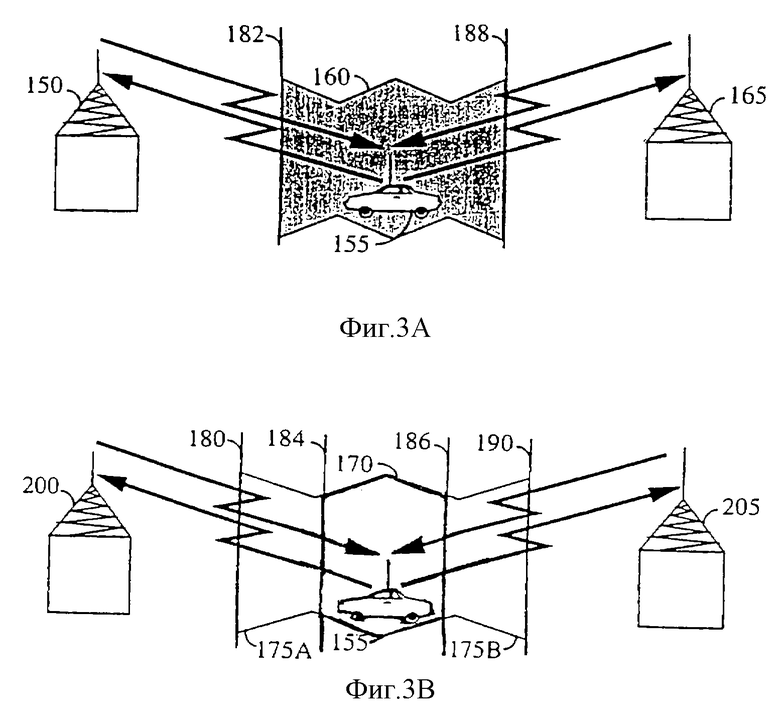
Фиг. 3А - идеализированное представление области жесткой передачи обслуживания системы с ЧМ;
Фиг. 3В - идеализированное представление области жесткой и гибкой передачи обслуживания системы МДКР;
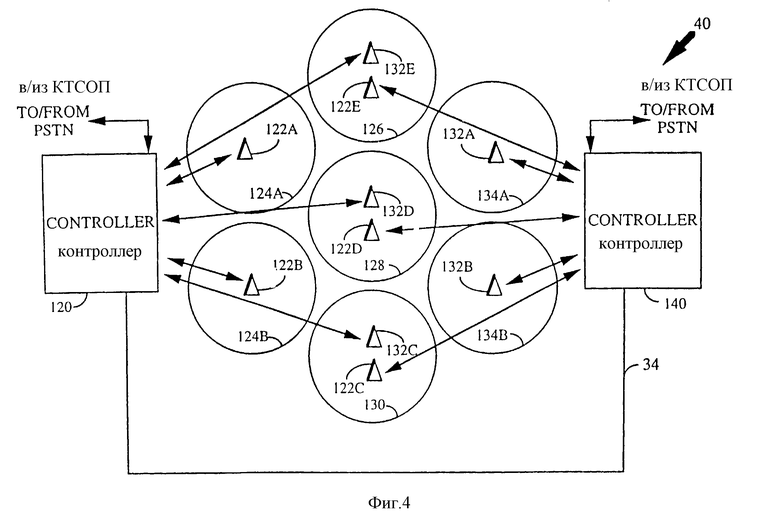
Фиг. 4 - сотовая сеть связи, в которой группа пограничных зон обслуживания содержит первую и вторую совместно расположенные базовые станции, связанные соответственно с первой и второй сотовой системой; и
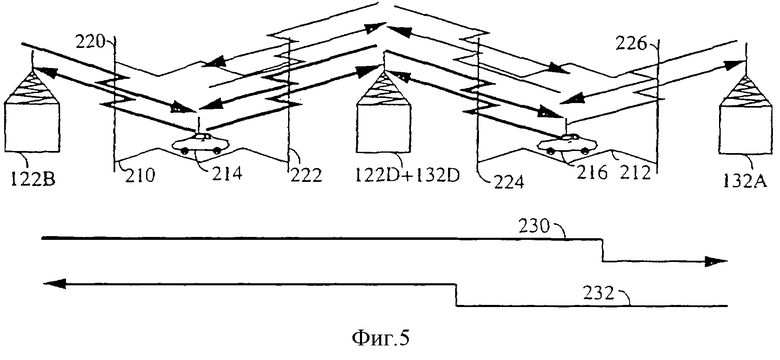
Фиг. 5 - базовые станции от двух различных систем и передача обслуживания, которая имеет место, когда подвижная станция перемещается между зонами обслуживания разных базовых станций.
Описание предпочтительного варианта осуществления изобретения
На фиг. 1 показан пример сотовой телефонной системы, беспроводной учрежденческой телефонной системы с исходящей и входящей связью, беспроводного абонентского шлейфа, системы персональной связи, системы диспетчерской связи либо другой аналогичной беспроводной системы связи. В альтернативном варианте осуществления базовые станции по фиг.1 могут находиться на спутниках или на борту воздушных судов. В системе, показанной на фиг.1, могут быть использованы различные способы модуляции с множественным доступом для обеспечения связи между большим количеством подвижных станций и множеством базовых станций. Из уровня техники известен ряд способов реализации систем связи с множественным доступом, таких как множественный доступ с временным разделением каналов (МДВР), множественный доступ с частотным разделением каналов (МДЧР) и множественный доступ с кодовым разделением каналов (МДКР). Однако способ модуляции с расширенным спектром МДКР имеет значительные преимущества по сравнению с указанными способами модуляции для систем связи с множественным доступом. Использование способов МДКР в системах связи с множественным доступом раскрыто в Патенте США 4901307 от 13 февраля 1990 на "Систему связи с множественным доступом и расширенным спектром, использующую спутниковые или наземные ретрансляторы", права на который принадлежат владельцу прав на настоящее изобретение. Многие из описанных в нем идей могут быть использованы вместе с самыми разными способами связи, хотя раскрытые здесь предпочтительные варианты осуществления описаны со ссылками на систему МДКР.
При использовании связи с МДКР один и тот же частотный спектр может быть использован множеством станций для передачи множества отличных друг от друга сигналов связи. Использование МДКР приводит к гораздо более высокой эффективности использования спектра, чем та, которая может быть достигнута при использовании других способов множественного доступа, что позволяет увеличить пропускную способность системы для пользователей.
В типичной системе МДКР каждая базовая станция передает уникальный пилот-сигнал. В предпочтительном варианте осуществления пилот-сигнал представляет собой немодулированный сигнал в прямой последовательности с расширенным спектром, который непрерывно передается каждой базовой станцией с использованием общего псевдошумового (ПШ) расширяющего кода. Каждая базовая станция или сектор базовой станции передает общую последовательность пилот-сигналов, сдвинутую во времени относительно других базовых станций. Подвижная станция может идентифицировать базовую станцию на основе фазового сдвига кода пилот-сигнала, который она принимает от этой базовой станции. Пилот-сигнал также обеспечивает фазовую привязку для когерентной демодуляции и основание для измерений уровня сигнала, используемых при принятии решения о передаче обслуживания.
На фиг.1 системный контроллер и коммутатор 10, называемый также центром коммутации мобильной связи (ЦКМ), обычно содержит схемы интерфейса и обработки для обеспечения системного управления базовыми станциями. Контроллер 10 также управляет маршрутизацией телефонных вызовов от коммутируемой телефонной сети общего пользования (КТСОП) на соответствующую базовую станцию для передачи на соответствующую подвижную станцию. Контроллер 10 также управляет маршрутизацией вызовов от подвижных станций через по меньшей мере одну базовую станцию на КТСОП. Контроллер 10 может направлять вызовы между подвижными станциями через соответствующие базовые станции.
Типичная беспроводная система связи содержит несколько базовых станций, имеющих множество секторов. Многосекторная базовая станция содержит множество независимо передающих и приемных антенн, а также несколько независимых схем обработки. Настоящее изобретение равным образом применяют как к каждому сектору разделенной на секторы базовой станции, так и к односекторным независимым базовым станциям. Можно считать, что термин базовая станция обозначает либо сектор базовой станции, либо односекторную базовую станцию.
Контроллер 10 может быть подсоединен к базовым станциям различными способами, например посредством выделенных телефонных линий, оптоволоконных линий связи или микроволновых линий связи. На фиг.1 в качестве примера показаны базовые станции 12, 14 и 16 и подвижная станция 18. Подвижная станция 18 представляет собой телефон в транспортном средстве, портативный телефонный аппарат, аппарат системы персональной связи, блок сети диспетчерской связи либо стационарный аппарат беспроводного абонентского шлейфа или любое другое подходящее устройство для речевой связи или обмена данными. Стрелки 20А-20В показывают возможную линию связи между базовой станцией 12 и подвижной станцией 18. Стрелки 22А-22В показывают возможную линию связи между базовой станцией 14 и подвижной станцией 18. Подобным же образом стрелки 24А-24В показывают возможную линию связи между базовой станцией 16 и подвижной станцией 18.
Места расположения базовых станций рассчитаны так, чтобы обеспечить обслуживание подвижных станций, расположенных внутри их зон обслуживания. Когда подвижная станция находится в холостом режиме, то есть когда вызова нет, эта подвижная станция постоянно контролирует передачи пилот-сигналов от каждой находящейся по соседству базовой станции. Как показано на фиг.1, пилот-сигналы передаются на подвижную станцию 18 базовыми станциями 12, 14 и 16 по линиям связи 20В, 22В и 24В соответственно. В общем случае термин прямая линия связи обозначает соединение от базовой станции к подвижной станции. В общем случае термин обратная линия связи обозначает соединение от подвижной станции к базовой станции.
В примере, показанном на фиг.1, считается, что подвижная станция 18 находится в зоне обслуживания базовой станции 16. Как таковая, подвижная станция 18 в общем случае принимает пилот-сигнал от базовой станции 16 с уровнем, более высоким, чем у любого другого пилот-сигнала, который она контролирует. Когда подвижная станция 18 инициирует связь по каналу трафика (то есть телефонный вызов), то на базовую станцию 16 от подвижной станции 18 передается управляющее сообщение. Базовая станция 16, приняв сообщение запроса на вызов, подает сигнал в контроллер 10 и передает вызываемый телефонный номер. Затем контроллер 10 выполняет соединение по вызову через КТСОП с желаемым абонентом.
Если вызов инициирован от КТСОП, то контроллер 10 передает информацию о вызове на группу базовых станций, расположенных поблизости от места, в котором было зарегистрировано самое последнее присутствие подвижной станции. В ответ базовые станции транслируют сообщение персонального вызова. Когда требуемая подвижная станция принимает сообщение ее персонального вызова, он посылает в ответ управляющее сообщение, которое передается на ближайшую базовую станцию. Управляющее сообщение уведомляет контроллер 10, что данная конкретная базовая станция установила связь с подвижной станцией. Первоначально контроллер 10 направляет вызов на подвижную станцию через эту базовую станцию.
Если подвижная станция 18 выходит из зоны обслуживания первоначальной базовой станции, к примеру базовой станции 16, то связь передается на другую базовую станцию. Процесс передачи связи на другую базовую станцию называют передачей обслуживания. В предпочтительном варианте осуществления процедура передачи обслуживания инициируется и поддерживается подвижной станцией.
В соответствии с "Mobile Station - Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular System" (Стандарт совместимости "подвижная станция - базовая станция" для двухрежимной широкополосной сотовой системы с расширенным спектром), TIA/EIA/IS-95, называемым обычно просто IS-95, передача обслуживания, "поддерживаемая подвижной станцией", может быть инициирована самой подвижной станцией. Подвижная станция оборудована поисковым приемником, который дополнительно к выполнению других функций используется для сканирования передачи пилот-сигнала соседних базовых станций. Если обнаруживается, что пилот-сигнал одной из соседних базовых станций, к примеру базовой станции 12, выше заданного порога, то подвижная станция 18 передает сообщение на текущую базовую станцию, а именно базовую станцию 16. Информация передается через базовую станцию 16 на контроллер 10. Контроллер 10, приняв эту информацию, может инициировать соединение между подвижной станцией 18 и базовой станцией 12. Контроллер 10 делает запрос о назначении базовой станцией 12 ресурсов для вызова. В предпочтительном варианте осуществления базовая станция 12 назначает канальный элемент для обработки вызова и сообщает об этом назначении обратно контроллеру 10. Контроллер 10 через базовую станцию 16 информирует подвижную станцию 18 о том, чтобы она вела поиск сигнала от базовой станции 12, и информирует базовую станцию 12 о параметрах канала трафика подвижной станции. Подвижная станция 18 осуществляет связь через обе базовые станции 12 и 16. Во время этого процесса подвижная станция продолжает идентифицировать и измерять уровень пилот-сигналов, которые она принимает. Таким образом достигается гибкая передача обслуживания, поддерживаемая подвижной станцией.
Вышеупомянутую процедуру можно рассматривать также как "гибкую" передачу обслуживания, при которой подвижная станция осуществляет связь одновременно через более чем одну базовую станцию. Во время гибкой передачи обслуживания контроллер может комбинировать сигналы либо осуществлять выбор между сигналами, принимаемыми от каждой базовой станции, с которой подвижная станция установила связь. Контроллер транслирует сигналы от КТСОП на каждую базовую станцию, с которой подвижная станция установила связь. Подвижная станция комбинирует сигналы, которые она принимает от каждой базовой станции, чтобы получить совокупный результат. Передача обслуживания, поддерживаемая подвижной станцией, может усложниться, если окажется, что подвижная станция расположена внутри зоны обслуживания двух
или более базовых станций, которые находятся не в одной и той же сотовой системе, то есть тех, которые управляются не одним и тем же контроллером.
На фиг.2 показана сеть 30 сотовой связи, содержащая первую и вторую сотовые системы, управляемые соответственно первым и вторым контроллерами 100 и 112. Контроллеры 100 и 112 подсоединены соответственно к базовым станциям первой и второй сотовых систем различными способами, например посредством выделенных телефонных линий, оптоволоконных линий связи или микроволновых линий связи. На фиг. 2 в качестве примера представлено пять таких базовых станций 102А-102Е, обеспечивающих соответственно зоны 104А-104Е обслуживания первой системы, и пять базовых станций 108А-108Е, обеспечивающих соответственно зоны 110А-110Е обслуживания второй сотовой системы.
Для удобства изображения зоны 104А-104Е обслуживания и зоны 110А-110Е обслуживания на фиг. 2 и далее представленные зоны обслуживания на фиг.4 показаны в виде кругов или шестиугольников и являются в значительной мере идеализированными. В реальных условиях связи зоны обслуживания базовых станций могут отличаться по размеру и форме. Зоны обслуживая базовых станций часто перекрываются, что обусловливает появление форм зон обслуживания, отличающихся от идеальной круговой или шестиугольной. Кроме того, как известно из уровня техники, базовые станции могут быть разбиты на секторы, например на три сектора.
Из этого следует, что зоны 104С-104Е и 110С-110Е обслуживания можно определить как граничные или переходные зоны обслуживания, поскольку эти зоны обслуживания находятся поблизости границы между первой и второй сотовыми системами. Остальные зоны обслуживания внутри каждой системы определены как внутрилежащие или внутренние зоны обслуживания.
Как очевидно из фиг.2, контроллер 112 не имеет прямого доступа к связи с базовыми станциями 102А-102Е, а контроллер 100 не имеет прямого доступа к связи с базовыми станциями 108А-108Е. Как показано на фиг.2, контроллеры 100 и 112 могут осуществлять связь друг с другом. Например, стандарт EIA/TIA/IS-41 под заголовком "Cellular Radio Telecommunication Intersystem Operation" (Межсистемные операции сотовой радиосвязи) и его следующая версия определяют стандарт для связи между коммутаторами различных рабочих областей, как это показано посредством межсистемной линии 34 данных на фиг.2. Для обеспечения гибкой передачи обслуживания между одной из базовых станций 102А-102Е и одной из базовых станций 108А-108Е между контроллерами 100 и 112 должна проходить информация о сигналах вызовов и информация управления мощностью. Сущность соединения между контроллерами может не позволять поддерживать передачу таких данных. Кроме того, архитектуры системы, управляемой контроллером 100, и системы, управляемой контроллером 112, могут отличаться друг от друга. Следовательно, настоящее изобретение относится к обеспечению механизма жесткой передачи обслуживания между двумя системами, где гибкая передача обслуживания не доступна.
Подвижная станция запрограммирована на непрерывный контроль за передачами пилот-сигналов от группы соседних базовых станций. Рассмотрим случай, когда подвижная станция расположена внутри зоны 104D обслуживания, но приближается к зоне 110D обслуживания. В этом случае, если подвижная станция начинает принимать пригодные для использования уровни сигналов от базовой станции 108D, то об этом сообщается на базовую станцию 102D и на любую другую базовую станцию (станции), с которыми подвижная станция в данный момент находится на связи. Прием подвижной станцией уровней сигнала, пригодных для использования, может быть определен путем измерения одного или более количественных параметров, таких как уровень сигнала, отношение сигнал-шум, частота ошибок кадрирования, частота стирания кадров, частота ошибок по битам и/или относительная временная задержка принимаемого сигнала. В предпочтительном варианте осуществления измерение основано на уровне пилот-сигнала, принимаемого подвижной станцией. После обнаружения пригодных для использования уровней сигналов на подвижной станции и информирования об этом базовой станции 102D с использованием сообщения об уровне сигнала процедура поддерживаемой подвижной станцией жесткой передачи обслуживания на той же частоте от базовой станции 102D на базовую станцию 108D может быть выполнена следующим образом:
(i) базовая станция 102D транслирует сообщенный подвижной станцией уровень сигнала, принятого от базовой станции 108D, на контроллер 100, который уведомляет о том, что базовая станция 108D находится под управлением контроллера 112;
(ii) контроллер 100 запрашивает канальные ресурсы и средства межсистемной магистрали между двумя системами у базовой станции 108D через контроллер 112 и по межсистемной линии 34 данных;
(iii) контроллер 112 отвечает на этот запрос, снабжая контроллер 110 через межсистемную линию 34 данных информацией, которая идентифицирует канал, на котором должна быть установлена связь, а также другой информацией. Кроме того, контроллер резервирует базовой станции 108D канал, предназначенный для связи с подвижной станцией, и ресурсы магистрали;
(iv) контроллер 100 подает через базовую станцию 102D на подвижную станцию информацию о новом канале и устанавливает время, когда подвижная станция должна начать осуществлять связь с базовой станцией 108D;
(v) в точно определенный момент времени устанавливается связь между подвижной станцией и базовой станцией 108D посредством жесткой передачи обслуживания и
(vi) контроллер 112 уведомляет контроллер 100 об успешном переходе подвижной станции в систему.
При этом подходе возникает одна сложность, состоящая в том, что базовая станция 108D может не принимать пригодный для использования уровень сигнала от подвижной станции. По этой либо другим причинам, обычно связанным с жесткой передачей обслуживания, сеанс связи во время процесса передачи управления контроллеру 112 может быть потерян. Если сеанс связи потерян, то от контроллера 112 на контроллер 100 посылается не подтверждение, а сообщение об ошибке.
Другая проблема, связанная с обеспечением жесткой передачи обслуживания, обусловлена сущностью границ зон обслуживания системы МДКР. В системе с ЧМ, к примеру в системе AMPS, области перекрытия зон обслуживания достаточно широки. Область перекрытия зон обслуживания - это зона, в которой может поддерживаться связь между подвижной станцией и любой одной из двух разных базовых станций. В системе с ЧМ такие области перекрытия зон обслуживания должны быть широкими, поскольку жесткая передача обслуживания может быть успешно осуществлена только тогда, когда подвижная станция находится в области перекрытия зон обслуживания. Например, на фиг.3А представлена в значительной степени идеализированная система с ЧМ. Базовая станция 150 и базовая станция 165 способны обеспечить ЧМ связь с подвижной станцией 155 по прямой и обратной линиям связи. (Прямая линия связи относится к связи от базовой станции к подвижной станции. Обратная линия связи относится к связи от подвижной станции к базовой станции). Внутри области 160 уровень сигнала от обеих базовых станцией 150 и 165 достаточен для поддержания связи с подвижной станцией 155. Следует отметить, что по самой сущности ЧМ системы базовые станции 150 и 165 не могут осуществлять связь с подвижной станцией 155 одновременно. Когда внутри области 160 происходит жесткая передача обслуживания от базовой станции 150 на базовую станцию 165, для связи между базовой станцией 165 и подвижной станцией 155 используется новая частота, отличная от той, которая использовалась между базовой станцией 150 и подвижной станцией 155. Базовая станция 165 никогда не ведет передачу на какой-либо частоте, используемой базовой станцией 150, и, следовательно, базовая станция 165 номинально обеспечивает отсутствие взаимных помех при осуществлении связи между базовой станцией 150 и любой подвижной станцией, с которой она находится на связи. Граница 182 указывает место, за которым связь от базовой станции 165 к подвижной станции 155 невозможна. Аналогично граница 188 указывает место, за которым невозможна связь от базовой станции 150 к подвижной станции 155. Фиг.3А, также как и фиг.3В, нарисованы без соблюдения масштаба, в действительности области перекрытия зон обслуживания являются относительно узкими по сравнению со всей зоной обслуживания каждой базовой станции.
При гибкой передаче обслуживания в режиме МДКР существование области перекрытия зон обслуживания, в которой связь может поддерживаться полностью только одной из двух базовых станций, не является критическим. В области, где имеет место гибкая передача обслуживания, достаточным условием поддержания надежной связи является установление связи одновременно с двумя или более базовыми станциями. В системе МДКР активная и соседняя базовые станции обычно работают на одной и той же частоте. Следовательно, когда подвижная станция достигает зоны обслуживания соседней базовой станции, уровни сигнала от активной базовой станции снижаются, а уровни помех от соседней базовой станции возрастают. Если гибкая передача обслуживания не установлена, то соединение между активной базовой станцией и подвижной станцией может быть поставлено под угрозу из-за возрастания помех от соседней базовой станции. Соединение подвергается особой угрозе, если сигнал замирает по отношению к действующей базовой станции и не замирает по отношению к соседней базовой станции.
На фиг.3В в значительной степени идеализированном виде представлена система МДКР. Базовая станция 200 МДКР и базовая станция 205 МДКР способны обеспечить связь в режиме МДКР с подвижной станцией 155 по прямой и обратной линиям связи. Внутри наиболее темной области 170 уровень сигнала как от базовой станции 200, так и от базовой станции 205 достаточен для поддержания связи с подвижной станцией 155, даже если связь установлена только с одной из базовых станций 200 или 205. За границей 184 связь только через одну базовую станцию 205 ненадежна. Аналогично, за границей 186 ненадежна связь только через одну базовую станцию 200.
Области 175А, 170 и 175В представляют зоны, в которых имеется вероятность того, что подвижная станция находится в состоянии гибкой передачи обслуживания между базовыми станциями 200 и 205. Установление связи через обе базовые станции 200 и 205 повышает общую надежность системы, даже если линия связи с подвижной станцией внутри области 175А к базовой станции 205 ненадежна для поддержания связи в одиночку. За границей 180 уровни сигналов от базовой станции 205 недостаточны для поддержания связи с подвижной станцией 155 даже при гибкой передаче обслуживания. За границей 190 уровни сигналов от базовой станции 200 недостаточны для поддержания связи с подвижной станцией 155 даже при гибкой передаче обслуживания.
Следует отметить, что фигуры 3А и 3В изображены со ссылками друг на друга. Значения позиций, используемых для обозначения границ 180, 182, 184, 186, 188 и 190, возрастают с увеличением расстояния от базовой станции 150 и базовой станции 200. Как таковая, область гибкой передачи обслуживания между границами 180 и 190 является наиболее широкой. Область перекрытия зон обслуживания с ЧМ между границами 182 и 188 лежит внутри области гибкой передачи обслуживания МДКР. Область "жесткой передачи обслуживания" МДКР является очень узкой областью между границами 184 и 186.
Следует отметить, что если базовая станция 200 принадлежит к первой системе, а базовая станция 205 принадлежит ко второй системе, то базовые станции 200 и 205 могут оказаться неспособными одновременно поддерживать связь с подвижной станцией 155. Таким образом, если есть необходимость передать связь от базовой станции 200 на базовую станцию 205, то необходимо выполнить жесткую передачу обслуживания от базовой станции 200 на базовую станцию 205. Следует также отметить, что, для того чтобы жесткая передача обслуживания с высокой вероятностью была успешной, подвижная станция должна быть расположена в области жесткой передачи обслуживания МДКР между границами 184 и 186 в области 170. Трудность состоит в том, что область 170 жесткой передачи обслуживания может быть очень узкой и время, которое уходит на перемещение подвижной станции 155 в или из области 170 жесткой передачи обслуживания, может быть очень коротким. Кроме того, трудно распознать, находится ли подвижная станция 155 внутри области 170 жесткой передачи обслуживания. Как только определено, что подвижная станция 155 находится в области 170 жесткой передачи обслуживания, должно быть принято решение, к какой базовой станции и когда должна иметь место жесткая передача обслуживания. Настоящее изобретение позволяет избежать этих трудностей путем использования для выполнения жесткой передачи обслуживания совместно расположенных базовых станций.
На фиг. 4 показана сотовая сеть 40 связи, содержащая первую и вторую сотовые системы под управлением контроллеров 120 и 140. На фиг.4 базовые станции 122С-122Е первой системы и базовые станции 132С-132Е второй системы соответственно распложены вместе внутри граничных зон обслуживания 126, 128 и 130. Сеть 40 содержит также базовые станции 122А и 122В, управляемые контроллером 120, которые обеспечивают зоны 124А и 124В обслуживания соответственно, и базовые станции 132А и 132В, управляемые контроллером 140, которые обеспечивают зоны 134А и 134В обслуживания соответственно. Поскольку зоны 126, 128 и 130 обслуживания содержат каждая базовые станции, находящиеся под управлением обоих контроллеров 120 и 140, сеть 40 обеспечивает уровень сигнала, достаточный для выполнения межсистемной жесткой передачи обслуживания в любом месте внутри зон 126, 128 и 130 обслуживания. В предпочтительном варианте осуществления базовые станции реально могут использовать некоторое оборудование совместно. Например, базовые станции могут использовать одну и ту же антенну, один и тот же приемный малошумящий усилитель (МШУ), один и тот же усилитель мощности передачи, один и тот же преобразователь с повышением/понижением частоты и одну и ту же подсистему ПЧ (промежуточной частоты). Кроме того, обеими совместно расположенными базовыми станциями могут быть использованы некоторые канальные блоки (а именно, модемы), применяемые при цифровой обработке группового спектра.
В предпочтительном варианте осуществления совместно расположенные базовые станции совместно используют общую группу приемных и передающих антенн. Совместное использование общей группы антенн дает два преимущества. Совместное использование антенн обеспечивает по существу одинаковую зону обслуживания, соответствующую каждой базовой станции. Совместное использование антенн также гарантируют, что замирание сигнала на подвижной станции одинаково для обеих базовых станций. Коррелированное замирание сигнала от каждой базовой станции является важным условием, поскольку этим обеспечивается постоянство отношения "сигнал-помеха" на подвижной станции, обслуживаемой базовой станцией, обеспечивающей прохождение, даже при наличии замирания. Если замирания сигнала от каждой базовой станции не коррелированны, то линия связи между базовой станцией, обеспечивающей прохождение, и подвижной станцией может оказаться под угрозой, если сигнал замирает по отношению к базовой станции, обеспечивающей прохождение, но не замирает по отношению к базовой станции, обеспечивающей обслуживание.
Каждая из базовых станций 122С-122Е и базовых станций 132С-132Е ведет передачу на общей частоте, используя пилот-сигналы, сдвинутые на заранее заданную величину, точно так, как они вели бы передачу, если бы эти две станции не были расположены вместе. Недостаток такой системы заключается в том, что передачи от каждой из базовых станций 122С-122Е вызывают взаимные помехи соответственно с передачами от каждой из базовых станций 132С-132Е, и, следовательно, подвижная станция, расположенная в одной из зон 126, 128 и 130 обслуживания, испытывает повышенные взаимные помехи. Настоящее изобретение обеспечивает способ и устройство для жесткой передачи обслуживания на одной и той же частоте между совместно распложенными базовыми станциями без нежелательного побочного эффекта возрастания взаимных помех.
Предпосылка настоящего изобретения заключается в том, что каждой из двух совместно расположенных базовых станций назначается статус либо базовой станции, обеспечивающей обслуживание, либо базовой станции, обеспечивающей прохождение. Базовая станция, обеспечивающая обслуживание, обслуживает множество подвижных станций, работающих в соответствующей зоне обслуживания. Базовая станция, обеспечивающая прохождение, используется для обеспечения возможностей гибкой передачи обслуживания в зоне обслуживания от соседних базовых станций, которые управляются тем же самым системным контроллером, что и базовая станция, обеспечивающая прохождение.
На фиг. 5 показан "вид сбоку" базовых станций 122В, 122D, 132D и 132А, показанных на фиг. 4. На фиг.5 представлены передачи обслуживания, которые возникают, когда подвижная станция перемещается между зоной 134А обслуживания, зоной 128 обслуживания и зоной 124В обслуживания, каждая из которых показана на фиг.4. Базовая станция 122В обеспечивает сигналы, направляемые контроллером 120, как показано жирными стрелками. Базовая станция 122D обеспечивает сигналы, направляемые контроллером 120, как показано жирными стрелками. Базовая станция 132D обеспечивает сигналы, направляемые контроллером 140, как показано тонкими стрелками. Базовая станция 132А обеспечивает сигналы, направляемые контроллером 140, как показано тонкими стрелками.
В этом случае базовая станция 122D назначена как базовая станция, обеспечивающая обслуживание, а базовая станция 132D назначена как базовая станция, обеспечивающая прохождение. На фиг.5 обозначены две области гибкой передачи обслуживания. Область 210 - это область, в которой возможна гибкая передача обслуживания между базовыми станциями 122В и 122D. За границей 222 уровни сигналов от базовой станции 122В недостаточны для поддержания связи даже при гибкой передаче обслуживания. За границей 220 уровни сигналов от базовой станции 122D недостаточны для поддержания связи даже при гибкой передаче обслуживания. Область 212 - это область, в которой возможна гибкая передача обслуживания между базовыми станциями 132D и 132А. За границей 226 уровни сигналов от базовой станции 132D недостаточны для поддержания связи даже при гибкой передаче обслуживания. За границей 224 уровни сигналов от базовой станции 132А недостаточны для поддержания связи даже при гибкой передаче обслуживания.
Линии перехода 230 и 232 показывают переходы от системы, управляемой контроллером 120, к системе, управляемой контроллером 140, где высокий уровень указывает, что подвижная станция в таком положении осуществляет связь в системе, управляемой контроллером 120, а низкий уровень указывает, что подвижная станция в таком положении осуществляет связь в системе, управляемой контроллером 140. Линия перехода 230 имеет отношение к подвижной станции, перемещающейся от базовой станции 122В к базовой станции 132А, в то время как линия перехода 232 имеет отношение к подвижной станции, перемещающейся от базовой станции 132А к базовой станции 122В.
Когда подвижная станция находится в зоне обслуживания базовой станции 132А и входит в область 212, она начинает процедуру гибкой передачи обслуживания между базовой станцией 132А и базовой станцией 132D. Следует отметить, что пилот-сигнал от базовой станции 122D также может быть обнаружен подвижной станцией. В предпочтительном варианте осуществления базовая станция 122D не является членом Соседней Группы в подвижной станции, когда подвижная станция находится на связи с базовой станцией 132А, поскольку базовая станция 122D не может стать членом Активной Группы. Если базовая станция 122D является членом Соседней Группы или Остальной Группы, то подвижная станция, базовая станция или они обе могут просто проигнорировать информацию об уровне пилот-сигнала, соответствующую базовой станции 122D. Если подвижная станция продолжает двигаться дальше в зону обслуживания базовой станции 132D, то уровень сигнала от базовой станции 132А падает ниже П_ПАД, и базовая станция 132А больше не является членом Активной Группы. Когда это имеет место, базовая станция, обеспечивающая прохождение, 132А посылает на подвижную станцию команду выполнить жесткую передачу обслуживания на базовую станцию 122D. Выполнение передачи обслуживания просто требует координации ресурсов между контроллером 120 и контроллером 140. Поскольку две базовые станции расположены вместе, решения относительно того, к какой базовой станции и когда следует выполнить жесткую передачу обслуживания, уже приняты. В предпочтительном варианте осуществления передачи обслуживания выполняют, когда Активная Группа состоит только из базовых станций, обеспечивающих прохождение. Передача обслуживания выполняется на базовую станцию или базовые станции, расположенные вместе с членами Активной Группы. Передача обслуживания может быть выполнена в любой момент, после того как контроллеры распределили ресурсы и передали соответствующую информацию, и предпочтительно выполняется сразу после этого.
Как отмечено выше, в предпочтительном варианте осуществления жесткая передача обслуживания выполняется, когда Активная Группа состоит только из базовых станций, обеспечивающих прохождение. Для инициирования жесткой передачи обслуживания может быть использован другой стимулирующий фактор. Например, жесткая передача обслуживания может иметь место, когда уровень сигнала для любой одной или обеих базовых станций 122D и 132D превысит некоторый порог. Жесткая передача обслуживания может иметь место, когда уровень сигнала от базовой станции 132А падает ниже некоторого порога.
Когда подвижная станция находится в зоне обслуживания базовой станции 122В и входит в область 210, она начинает процедуру гибкой передачи обслуживания между базовой станцией 122D и базовой станцией 122В. Заметим также, что подвижной станцией может быть обнаружен пилот-сигнал от базовой станции 132D. В предпочтительном варианте осуществления базовая станция 132D не является членом Соседней Группы в подвижной станции, когда подвижная станция находится на связи с базовой станцией 122В, поскольку базовая станция 132D не может стать членом Активной Группы. Если базовая станция 132D является членом Соседней Группы или Остальной Группы, то подвижная станция, базовая станция или они обе могут просто проигнорировать информацию об уровне пилот-сигнала, соответствующего базовой станции 132D. Если подвижная станция продолжает продвигаться дальше в зону обслуживания базовой станции 132D, то уровень сигнала от базовой станции 122В падает ниже П_ПАД, и базовая станция 122В больше не является членом Активной Группы.
Если подвижная станция продолжает двигаться к зоне обслуживания базовой станции 132А, то в результате она войдет в область 212. Когда подвижная станция продолжает двигаться к базовой станции 132А, то, прежде чем она достигнет границы 226, она должна будет осуществить жесткую передачу обслуживания к базовой станции 132D. Как отмечено выше со ссылками на фиг.3В, связь между базовой станцией 122D и подвижной станцией становится менее надежной, когда она движется по направлению к базовой станции 132А, поскольку уровень сигнала от базовой станции 122D уменьшается, в то время как помехи от базовой станции 132А возрастают. Жесткая передача обслуживания от базовой станции 122D к базовой станции 132D выполняется прежде, чем соединение становится ненадежным. После выполнения жесткой передачи обслуживания подвижная станция может начать процедуру гибкой передачи обслуживания между базовой станцией 132D и базовой станцией 132А.
Жесткая передача обслуживания на базовую станцию, обеспечивающую прохождение, 132D может возникнуть из-за целого ряда стимулирующих факторов. Например, даже если базовая станция 132А не может стать членом Активной Группы, пока не выполнена жесткая передача обслуживания, эта базовая станция может стать членом Группы Кандидатов. Когда подвижная станция приближается к базовой станции 132А, то уровень сигнала от базовой станции 132А превысит П_ ДОБ и базовая станция 132А станет членом Группы Кандидатов. Когда внутренняя базовая станция, управляемая контроллером, который управляет базовой станцией, обеспечивающей прохождение, станет членом Группы Кандидатов, может быть запущена жесткая передача обслуживания. Жесткая передача обслуживания может также иметь место, когда уровень сигнала для любой или обеих базовых станций 122D и 132D упадет ниже некоторого порога. Жесткая передача обслуживания может иметь место, когда уровень сигнала от базовой станции 132А превысит некоторый другой порог помимо П_ДОБ.
В предпочтительном варианте осуществления передачу обслуживания выполняют, когда базовая станция 132А становится членом Группы Кандидатов. Поскольку две базовые станции расположены совместно, решения относительно того, к какой базовой станции и когда следует выполнить жесткую передачу обслуживания, уже приняты. Передачу обслуживания выполняют, когда внутренняя базовая станция, управляемая контроллером, который управляет базовой станцией, обеспечивающей прохождение, становится членом Группы Кандидатов. Передачу обслуживания выполняют к базовой станции, обеспечивающей прохождение, или базовым станциям, расположенным совместно с членами Активной Группы. Жесткая передача обслуживания может быть выполнена в любой момент, после того как контроллеры распределили ресурсы и передали соответствующую информацию, и предпочтительно выполняется сразу после этого.
Ряд преимуществ очевиден из анализа Фиг. 5. Через базовую станцию, обеспечивающую прохождение, получают обслуживание только те подвижные станции, которые входят в общую зону обслуживания из системы, управляемой контроллером, который управляет базовой станцией, обеспечивающей прохождение, и те подвижные станции, которые собираются выйти из общей зоны обслуживания и войти в систему, управляемую контроллером, который управляет базовой станцией, обеспечивающей прохождение. Все другие подвижные станции получают обслуживание через базовую станцию, обеспечивающую обслуживание. На фиг. 5 размер областей, в которых возможна гибкая передача обслуживания, сильно увеличен по сравнению с общим размером зон обслуживания. Таким образом, величина взаимных помех в большинстве подвижных станций в общей области обслуживания поддерживается на минимальном уровне.
Другое преимущество состоит в существовании гистерезиса в процессе жесткой передачи обслуживания. Например, в области гистерезиса процесса жесткой передачи обслуживания расположена подвижная станция 216. Не зная предыдущие местоположения подвижной станции, нельзя знать, находится ли подвижная станция 216 на связи с базовой станцией 122D или базовой станцией 132D. Гистерезис имеет важное значение, поскольку системы наиболее эффективно работают тогда, когда выполняется минимальное количество жестких передач обслуживания. Гистерезис устраняет ситуацию, когда подвижная станция "перебрасывается" между двумя системами туда и обратно. Например, если бы не было гистерезиса, то подвижная станция могла бы выполнить жесткую передачу обслуживания от базовой станции, обеспечивающей прохождение, на базовую станцию, обеспечивающую обслуживание, и сразу после этого перехода оказаться подходящим кандидатом для передачи обслуживания обратно на базовую станцию, обеспечивающую прохождение. В этом случае подвижная станция может совершать ряд нефункциональных жестких передач обслуживания, которые без необходимости обременяют систему.
Наличие гистерезиса в настоящем изобретении разрешает эту "пинг-понговую" ситуацию. Заметим, что если подвижная станция следует по пути, отмеченному стрелкой 232, в зону обслуживания базовой станции 122D и базовой станции 132D, она не выполнит передачи обслуживания, пока не достигнет линии перехода, указанной на стрелке 232. Если подвижная станция изменяет направление своего движения на противоположное и выходит из зоны обслуживания в любой момент до того, как она достигла линии перехода, то эта подвижная станция никогда не выполнит жесткую передачу обслуживания. Если подвижная станция входит в ту же самую область с другого направления, она работает в соответствии со стрелкой 230. Заметим, что подвижная станция не завершит жесткую передачу обслуживания, пока она не достигнет линии перехода жесткой передачи обслуживания на стрелке 230. Следовательно, если подвижная станция, следующая по пути, указанному стрелкой 230, движется уже за линией перехода на стрелке 230, завершает жесткую передачу обслуживания и затем изменяет направление своего перемещения на противоположное, то она теперь функционирует в соответствии со стрелкой 232 и не завершит еще одну жесткую передачу обслуживания, пока не переместиться за линию перехода, указанную стрелкой 232.
Также, как было отмечено выше, в предпочтительном варианте осуществления именно добавление и удаление записей базовых станций соответственно из Группы Кандидатов и Активной Группы устанавливают положение линий перехода на стрелках 230 и 232. Значения порогов П_ДОБ, П_ВПАД и П_ПАД устанавливают точки, в которых добавляют записи соответственно в Группу Кандидатов и удаляют записи из Активной Группы. Как было указано выше, параметры П_ДОБ, П_ ВПАД и П_ПАД хранят в подвижной станции и устанавливаются базовой станцией. Следовательно, в совместно расположенных базовых станциях уровнями П_ДОБ, П_ ВПАД и П_ПАД можно манипулировать для регулирования зоны гистерезиса. Например, значение П_ПАД может быть снижено так, что вероятность того, что уровень пилот-сигнала превысит порог П_ДОБ вскоре после падения ниже П_ПАД, будет минимальной.
Имеется множество вариантов осуществления настоящего изобретения, которые находятся в пределах его объема. Например, настоящее изобретение хорошо работает в сочетании с конфигурацией базовых станций, разделенных на секторы. Если используется конфигурация, разделенная на секторы, то необходимо, чтобы мощность сигнала базовой станции, обеспечивающей прохождение, достигалась только в секторах, имеющих зоны обслуживания, которые примыкают к границе системы, соответствующей базовой станции, обеспечивающей прохождение.
Предшествующее описание предпочтительных вариантов осуществления предложено для того, чтобы дать возможность любому специалисту в данной области техники выполнять и использовать настоящее изобретение. Специалистам в данной области техники очевидны различные модификации этих вариантов осуществления, а раскрытые основополагающие принципы могут быть использованы в других вариантах без решения изобретательской задачи. Таким образом, настоящее изобретение не ограничено представленными здесь вариантами осуществления, а соответствует самому широкому объему, охватывающему раскрытые здесь принципы и новые признаки.
Изобретение относится к сотовым системам связи. Технический результат состоит в обеспечении возможности надежного выполнения передачи обслуживания по вызову между базовыми станциями разных систем. В сети связи пользователь сети осуществляет связь посредством подвижной станции через одну базовую станцию. Сеть связи содержит первый центр коммутации мобильной связи для управления связью через первую группу базовых станций и второй центр коммутации мобильной связи для управления связью через вторую группу базовых станций. Сеть также содержит базовую станцию, обеспечивающую обслуживание, управляемую первым центром коммутации мобильной связи и обеспечивающую обслуживание для первой переходной зоны обслуживания с использованием первого псевдошумового кода. 4 с. и 5 з.п.ф-лы, 5 ил.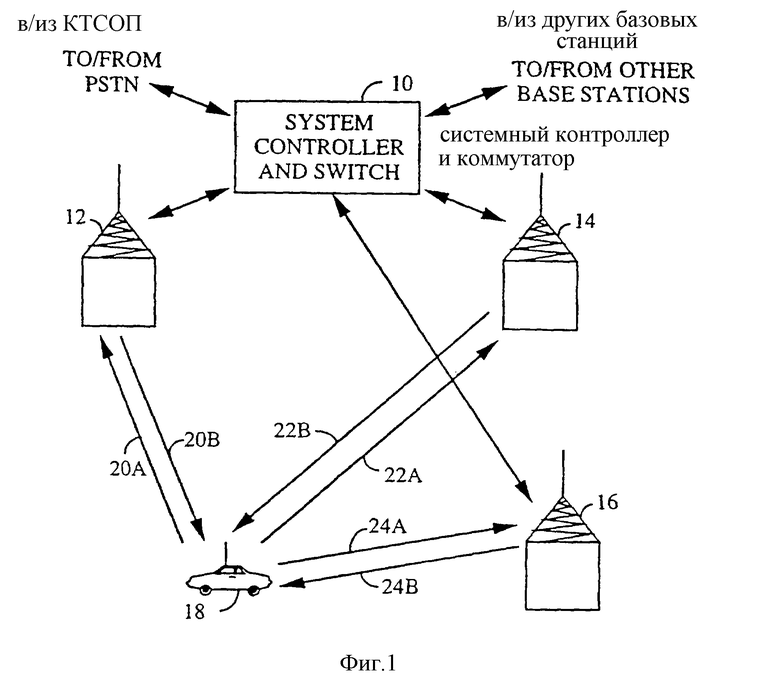
| US 5422933 А, 06.06.1995 | |||
| EP 0708573 А2, 24.04.1996 | |||
| WO 9621327 А1, 11.07.1996 | |||
| Многоканальное устройство с дифференциальной импульсно-кодовой модуляцией и временным делением каналов | 1981 |
|
SU970687A1 |

