Изобретение относится к системам сотовой связи, и более конкретно к способам и устройству для изменения распределения мощности прямого канала трафика в системе сотовой связи многостанционного доступа с кодовым разделением каналов МДКР.
Уровень техники
В системе сотовой связи МДКР общая полоса частот обычно используется для передачи от подвижной станции к группе базовых станций, а другая общая полоса частот обычно используется для передачи к подвижной станции от группы базовых станций. В других случаях общий набор частотных полос может быть использован для проведения связей. Основное преимущество передачи множества сообщений в общей полосе частот состоит в увеличении пропускной способности сотовой телефонной системы. Стандарт IS-95, принятый Ассоциацией промышленности Связи (TIA), является примером наиболее эффективного радио-интерфейса МДКР, который может быть использован для осуществления системы сотовой телефонной связи.
Группа сообщений, проводимых в одной и той же полосе частот в системах сотовой связи МДКР, разделяется и отличается одна от другой посредством модуляции и демодуляции передаваемых данных с использованием кодов псевдо-случайного шума (ПШ), известных как приемной, так и передающей системам. Другие сообщения представляются в виде фонового шума во время обработки любого конкретного сообщения. Поскольку другие сообщения представляются как фоновый шум, протоколы МДКР, такие, как IS-95, часто используют глубокое регулирование мощности передачи для более эффективного использования доступной полосы частот. Управление мощностью передачи поддерживает мощность передачи каждого сообщения вблизи минимума, необходимого для того, чтобы успешно осуществлять связь. Такое управление мощностью передачи облегчает обработку любого конкретного сообщения путем снижения уровня фонового шума, создаваемого другими сообщениями.
Другое преимущество передачи от базовых станций к подвижным в одной и той же полосе частот и передачи подвижных станций к базовой станции во второй полосе частот состоит в том, что может быть использована "мягкая передача обслуживания" для перехода подвижной станции из области обслуживания первой базовой станции в область обслуживания второй базовой станции. Мягкая передача обслуживания представляет собой процесс одновременного соединения подвижной станции с двумя или более базовыми станциями. Мягкая передача обслуживания может быть противопоставлена жесткой передаче обслуживания, во время которой соединение с первой базовой станцией прерывается до того, как установлено соединение со второй базовой станцией.
Как можно ожидать, мягкая передача обслуживания в общем более надежна, чем жесткая передача обслуживания, потому что, по меньшей мере, одно соединение поддерживается все время. Способы и системы для проведения мягкой передачи обслуживания в системе сотовой телефонной связи МДКР описаны в патенте US 5101101, озаглавленном "Способ и система для обеспечения мягкой передачи обслуживания и связи в системе сотовой телефонной связи МДКР", и патенте US 5267261, озаглавленном "Мягкая передача обслуживания, поддерживаемая подвижной станцией, в системе сотовой связи МДКР.
В соответствии с процедурой мягкой передачи обслуживания, описанной в вышеупомянутых патентах, каждая базовая станция передает соответствующий канал пилот-сигнала, который используется подвижными станциями для получения начальной синхронизации системы и обеспечения устойчивого сопряжения времени, частоты и фазы, отслеживая сигналы, передаваемые из сотовой ячейки. Канал пилот-сигнала, передаваемый каждой базовой станцией, использует общий расширяющий код (т.е. псевдошумовую последовательность), но использует разное смещение фазы кода, так подвижная станция может различать каналы пилот-сигнала, передаваемые соответствующим базовыми станциями.
Во время мягкой передачи обслуживания две или более базовые станции передают одни и те же данные прямого канала к подвижной станции. Подвижная станция принимает эти сигналы от группы базовых станций и объединяет их. Способ и устройство для выполнения такого объединения описаны в патенте US 5109390, озаглавленном "Приемник с разнесением в системе сотовой телефонной связи МДКР", он описывает способ объединения, при разнесении для использования в системе сотовой телефонной связи МДКР.
Хотя мягкая передача обслуживания обеспечивает более надежное соединение, в некоторых случаях мягкая передача обслуживания имеет также отрицательное воздействие на общую пропускную способность системы сотовой телефонной связи МДКР. Это происходит потому, что множество передач прямого канала, генерированных во время мягкой передачи обслуживания, могут увеличить общую мощность передачи, используемую для осуществления соответствующей связи. Эта увеличенная мощность передачи повышает общий фоновый шум, создаваемый системой, что, в свою очередь, может снизить общую пропускную способность системы.
Повышает ли мягкая передача обслуживания пропускную способность системы, или снижает ее, обычно зависит от условий, в которых находится подвижная станция во время мягкой передачи обслуживания. Если подвижная станция находится в условиях замирания, увеличенное разнесение, обеспечиваемое мягкой передачей обслуживания, в общем выгодно для характеристики системы, потому что сигналы в общем замирают независимо. Однако, если подвижная станция находится в условиях отсутствия замирания, разнесение источника данных обычно является избыточным. Поэтому для условий отсутствия замирания преимущество, обеспечиваемое увеличенным разнесением источника сигнала, обычно не оправдывает общее возрастание мощности передачи, вызываемое мягкой передачей обслуживания.
Таким образом, настоящее изобретение направлено на улучшение характеристики системы связи МДКР путем оптимизации конфигурации системы связи МДКР во время мягкой передачи обслуживания в условиях с множеством несущих частот, а также в зависимости от условий, в которых осуществляется связь.
Сущность изобретения
Соответственно, одной задачей этого изобретения является разработка нового способа для уменьшения общей мощности прямого канала трафика, передаваемой к подвижной станции во время мягкой передачи обслуживания.
Другой задачей этого изобретения является разработка системы, которая осуществляет вышеупомянутый способ.
Другой задачей этого изобретения является определение условий, в которых работает подвижная станция во время мягкой передачи обслуживания, и оптимизация конфигурации мягкой передачи обслуживания в ответ на это определение.
Изобретение одинаково применимо к прямой линии связи с множеством несущих частот.
Соответственно, одной задачей этого изобретения является разработка нового способа уменьшения общей мощности прямого канала трафика, передаваемой к подвижной станции прямой линией связи с множеством несущих частот.
Другой задачей этого изобретения является разработка системы, которая осуществляет вышеупомянутый способ.
Другой задачей этого изобретения является определение условий, в которых работает подвижная станция, и оптимизация конфигурации прямой линии связи с множеством несущих частот в ответ на это определение.
Настоящее изобретение применимо к системам, которые используют как мягкую передачу обслуживания, так и прямую линию связи с множеством несущих частот.
Настоящее изобретение предлагает новый способ и систему, в которой подвижная станция часто посылает сообщение бит-вектора к контроллеру системы, показывая количественно измеренные качества сигналов (например, отношения сигнал-шум) пилот-сигналов от каждой базовой станции в "активном наборе" каналов пилот-сигнала, прослеживаемых подвижной станцией. Подвижная станция генерирует сообщение бит-вектора путем мониторинга качества соответствующих пилот-сигналов, сравнения качества соответствующих каналов пилот-сигнала со стандартом, и передачи сообщения бит-вектора к соответствующим базовым станциям, находящимся в активном наборе подвижной станции, которые затем направляют эту информацию, содержащуюся в сообщении бит-вектора к контроллеру системы. В ответ контроллер системы выдает команду к базовым станциям, находящимся в активном наборе подвижной станции, регулируя выбранные мощности из соответствующих мощностей кодовых каналов базовых станций в соответствии с качествами соответствующих каналов пилот-сигнала, о которых сообщается в сообщении бит-вектора, генерированном подвижной станцией.
Поскольку прямой канал трафика включает соответствующие кодовые каналы базовых станций, находящихся в активном наборе подвижной станции, снижение мощности передачи соответствующих кодовых каналов уменьшает мощность передачи прямого канала трафика. Соответственно, общая пропускная способность системы связи МДКР возрастает в результате минимальной требуемой мощности прямого канала трафика, необходимой для надежного приема в подвижной станции. Путем быстрой передачи к контроллеру системы качества наблюдаемых каналов пилот-сигнала система МДКР способна быстро заново оптимизировать ресурсы системы в ответ на изменения внешних условий передачи, чтобы сделать максимальной пропускную способность системы связи.
В альтернативном примере осуществления изобретения, которое использует линию связи с множеством несущих частот, подвижная станция посылает бит для каждой несущей частоты, или же бит для каждой антенны. Дополнительно, базовая станция регулирует мощность на каждой несущей частоте независимо.
Краткое описание чертежей
Более полная оценка этого изобретения и его многих сопутствующих преимуществ будет легко получена, когда оно будет лучше понято со ссылкой к последующему подробному описанию, рассмотренному совместно с сопровождающими чертежами, на которых:
фиг.1 - блок-схема типовой системы сотовой телефонной связи МДКР в соответствии с настоящим изобретением;
фиг.2 - график качества канала пилот-сигнала в зависимости от времени, и на графике показана область мягкой передачи обслуживания;
фиг.3 - блок-схема подвижной станции;
фиг.4 - график, показывающий типовую вероятность частоты появления ошибок в кадрах в зависимости от Eb/No для разного количества передающих базовых станций, которые принимаются приемником с разнесением с N направлениями;
фиг. 5А - график, показывающий Ес/Iо в зависимости от времени в области мягкой передачи обслуживания для трех типовых пилот-сигналов;
фиг. 5В - график, подобный графику, показанному на фиг.5А, с добавлением порогового сигнала Δr, который сформирован ниже наивысшего уровня пилот-сигнала;
фиг. 6А - схема первой структуры данных для сообщения бит-вектора, показывающего качество канала пилот-сигнала;
фиг. 6В - схема второй структуры данных для сообщения бит-вектора, показывающего качество канала пилот-сигнала;
фиг. 6С - схема третьей структуры данных для сообщения бит-вектора, показывающего качество канала пилот-сигнала;
фиг. 7 - блок-схема последовательности сообщений для снижения общей величины мощности прямого канала трафика, передаваемой от базовых станций, находящихся в активном наборе, когда передается избыточная мощность;
фиг. 8 - блок-схема альтернативной последовательности сообщений для снижения общей величины мощности прямого канала трафика, передаваемой от базовых станций, находящихся в активном наборе, когда передается избыточная мощность;
фиг.9 - диаграмма прямой линии связи с множеством несущих частот;
фиг. 10 - блок-схема передатчика прямой линии связи с множеством несущих частот; и
фиг. 11 - блок-схема приемника прямой линии связи с множеством несущих частот.
Описание предпочтительных примеров осуществления
Ссылаясь теперь на чертежи, на которых одинаковые ссылочные номера обозначают одинаковые или соответствующие части на нескольких видах, и более конкретно, к фиг.1, на ней показана система связи 2, которая предпочтительно является системой сотовой телефонной связи, хотя она одинаково применима в телефонной станции общего пользования (АТСОП), системе служб персональной связи (ССПС), системе спутниковой связи, внутренней радиосвязи или наружной радиосвязи. Система 2 использует способы модуляции и демодуляции многостанционного доступа с кодовым разделением каналов (МДКР) при связи между ресурсами системы. Контроллер системы (селектор) 10, обычно называемый центром коммутации подвижных телефонов (ЦКПТ), включает схемы интерфейса и обработки для обеспечения системного управления группой базовых станций 12, 14, 16, 17 и 19. Контроллер системы 10 также управляет маршрутизацией телефонных разговоров от коммутируемой телефонной сети общего пользования (КТСОП) к соответствующим базовым станциям 12, 14, 16, 17 и 19 для передачи к соответствующим станциям назначения. Соединение к КТСОП или от нее может осуществляться по радио, оптическому волокну или "проводной" связи (например, витой паре или коаксиальному кабелю). Контроллер системы 10 осуществляет связь с частными сетями и сетями общего пользования, которые включают сети данных, мультимедийные сети, и другие частные сети или сети общего пользования. Кроме того, контроллер системы 10 осуществляет связь с другими базовыми станциями, которые не показаны на фиг.1, или от них.
Контроллер системы 10 осуществляет связь с базовыми станциями 12, 14, 16, 17 и 19 с помощью различных средств, таких, как выделенные телефонные линии, оптоволоконные линии связи, коаксиальные линии связи, или радиочастотные (РЧ) линии связи. Базовые станции 12, 14 и 16 осуществляют связь с другими системами, такими, как подвижная станция ("подвижная") 18, через радиосвязь МДКР с одной несущей частотой. Базовые станции 17 и 19 поддерживают связь с другими системами, такими, как подвижная станция 21, через линию связи с множеством несущих частот, состоящую из трех сигналов МДКР, показанных стрелками 26а-с. Подвижная станция 21 поддерживает связь с базовыми станциями 17 и 19 через обратную линию связи 28 с одной несущей частотой. Следует отметить, что прямая линия связи с множеством несущих частот может состоять из более чем трех несущих частот, или она может состоять из менее чем трех несущих частот. Фиг.1 также показывает прямую систему с передачей сигналов в широком спектре с множеством несущих частот и более обычную систему с одной несущей частотой, сосуществующие в одной и той же системе. Следует отметить, что, хотя это возможно, но предпочтительно, чтобы система использовала только один тип прямой линии связи.
Стрелки 20а и 20b показывают соответствующие обратную и прямую линии связи между базовой станцией 12 и подвижной станцией 18. Стрелки 22а и 22b показывают обратную и прямую линии связи между базовой станцией 14 и подвижной станцией 18. Подобным образом, стрелки 24а и 24b показывают возможные обратную и прямую линии связи между базовой станцией 16 и подвижной станцией 18. Хотя перекрестные линии связи между соответствующими базовыми станциями 12, 14, 16 не показаны на фиг.1, или прямые, или радиочастотные соединения от контроллера 10 к подвижной станции 18, такие возможности включены в аспекты настоящего изобретения.
Базовые станции 12, 14 и 16 каждая передает данные трафика через кодовый канал Уолша к подвижной станции 18 на прямой линии связи 20b, 22b и 24b, когда контроллер системы 10 назначает базовые станции 12, 14 и 16 в активный набор подвижной станции и дает указание соответствующим базовым станциям установить интерфейс с этой подвижной станцией 18. Кодовый канал, назначенный для связи с подвижной станцией 18, также называется каналом трафика. Каждый из кодовых каналов, передаваемых от различных базовых станций к подвижной станции, содержит избыточную информацию, и доступен подвижной станции 18 для объединения соответствующих кодовых каналов, используя механизм объединения разнесения (объясняемый здесь более подробно). Для увеличения скорости передачи прямой линии связи к подвижной станции, может быть использовано множество кодовых каналов от одной и той же базовой станции. В этом случае группа кодовых каналов называется каналом трафика. Сигнал прямой линии связи включает группу кодовых каналов, включая набор каналов трафика, и дополнительные каналы управления, например, каналы пилот-сигнала, каналы синхронизации и пейджинга (поискового вызова). Настоящее изобретение снижает мощность передачи сигнала прямой линии связи путем уменьшения времени, когда каналы трафика активны во время мягкой передачи обслуживания.
Базовые станции 12, 14 и 16 соответственно передают канал пилот-сигнала к подвижной станции 18 по прямым линиям связи 20b, 22b и 24b. Каналы пилот-сигнала отличаются от каналов трафика, передаваемых от той же самой базовой станции, разными кодами Уолша. Соответствующие каналы пилот-сигнала от разных базовых станций отличаются друг от друга смещениями ПШ кода пилот-сигнала. В отсутствие блокировки или замирания канал пилот-сигнала, принимаемый в подвижной станции 18 oт базовой станции 16, будет ожидаться большим по мощности принятого сигнала, чем таковые от базовых станций 12 и 14, потому что базовая станция 18 находится ближе всего к базовой станции 16.
Или же, вместо отдельного кодового канала (код Уолша) для пилот-сигнала, пилот-сигнал может быть включен или мультиплексирован в потоки канала трафика, которые посылаются к отдельным подвижным станциям. Включение может быть выполнено путем использования специальных символов пилот-сигнала или дополнительного сигнала. Когда используется вставленный пилот-сигнал, обычно имеется общий пилот-сигнал, который используется для начального захвата системы и для определения момента, когда выполнять передачу обслуживания, или же, отдельные пилот-сигналы могут быть переданы на каждый канал трафика или на каждую группу каналов трафика.
Когда подвижная станция 18 находится в области мягкой передачи обслуживания (например, при движении из области обслуживания, по меньшей мере, одной базовой станции к, по меньшей мере, одной другой базовой станции), контроллер системы 10 посылает сообщение направления передачи обслуживания, которое включает список базовых станций, назначенных в активный набор подвижной станции. Сообщение направления передачи обслуживания может также включать дополнительную информацию, такую, как пороги передачи обслуживания (например, порог добавления и порог исключения), которая будет полезна подвижной станции после выполнения передачи обслуживания. Как описано в вышеупомянутых заявках и в стандарте IS-95, активный набор содержит пилот-сигналы от базовых станций, с которыми установлен интерфейс у подвижной станции. Набор кандидатов содержит каналы пилот-сигнала, которые были в последнее время обнаружены подвижной станцией с достаточным уровнем, и набор соседей содержит каналы пилот-сигнала от базовых станций, о которых известно, что они находятся в той же географической области.
Зная, какие каналы пилот-сигнала будут, вероятно, иметь достаточный уровень (т. е. зная, какие станции назначены в наборы соседей и кандидатов подвижной станции), обработка, требуемая в подвижной станции, уменьшается в том, что подвижная станция может более часто искать каналы пилот-сигнала, соответствующие базовым станциям в наборах соседей и кандидатов подвижной станции, а также в активном наборе.
Фиг. 2 представляет график, показывающий относительное качество каналов пилот-сигнала, которое может наблюдаться подвижной станцией 18 от сотовых ячеек 12, 14 и 16, как показано на фиг.1. График на фиг.2 показывает отношение энергии на ПШ элементарную посылку (Еc) к общей принятой мощности (Iо) в подвижной станции 18 в зависимости от времени для трех типовых каналов пилот-сигнала от базовых станций 12, 14 и 16. Как показано на фиг.2, пилот-сигнал от базовой станции 16 ухудшается по качеству с течением времени, показывая, что подвижная станция 18 удаляется от базовой станции 16. Наоборот, пилот-сигнал от базовой станции 12 улучшается по качеству с течением времени, что означает, что подвижная станция 18 движется в сторону базовой станции 12. Пилот-сигнал от базовой станции 14 остается относительно постоянным по качеству, показывая, что подвижная станция 18 двигается по периметру области обслуживания базовой станции 14.
Интересующая область на фиг.2 - это область мягкой передачи обслуживания. В области мягкой передачи обслуживания подвижная станция 18 и контроллер системы 10 устанавливают связь друг с другом для определения, какая базовая станция должна быть в активном наборе подвижной станции, на основании относительного качества каналов пилот-сигнала сотовых ячеек 12, 14 и 16. В иллюстрируемом примере канал пилот-сигнала от базовой станции 16 первоначально находится в активном наборе подвижной станции, потому что уровень канала пилот-сигнала базовой станции 16 находится выше уровня порога добавления. Однако в конце области мягкой передачи обслуживания пилот-сигнал от базовой станции 16 падает ниже уровня порога исключения в некоторый период времени.
В результате, контроллер системы 10 заставляет подвижную станцию удалять базовую станцию 16 из активного набора, через сообщение измерения уровня пилот-сигнала, передаваемого подвижной станцией к контроллеру системы 10. Поскольку пилот-сигнал от базовой станции 14 никогда не превосходит уровня порога добавления, базовая станция 14 не добавляется к активному набору. Наоборот, базовая станция 12 переходит уровень порога добавления в необходимый период времени и, таким образом, добавляется к активному набору, который определен контроллером станции 10 в ответ на сообщение измерения уровня пилот-сигнала, генерируемое подвижной станцией 18. В конце области мягкой передачи обслуживания только сигнал базовой станции 12 остается в активном наборе подвижной станции 18.
Часто, принятый с плохим качеством канал пилот-сигнала обнаруживается выше порога удаления достаточно часто для сохранения соответствующей базовой станции в активном наборе, даже хотя соответствующий канал трафика вносит небольшой вклад в качество приема в подвижной станции. Это, в частности, справедливо в условиях медленного замирания. В случае условий медленного замирания уровни принятых от базовой станции сигналов медленно изменяются относительно друг друга. Обычно, в течение некоторого времени одна базовая станция принимается сильнее другой и наоборот. Скорость замирания не настолько большая, чтобы получить краткосрочное преимущество разнесения. Таким образом, было бы предпочтительно передавать от более сильной базовой станции, а не от более слабой базовой станции.
Настоящее изобретение стремится уменьшить время передачи кодовых каналов от некоторых базовых станций, находящихся в условиях замирания для уменьшения общей энергии передачи, генерированной для связанной передачи. Уменьшение общей энергии передачи конкретной передачи повышает общую пропускную способность системы. Следует отметить, что можно использовать процедуры передачи обслуживания, которые удаляли бы базовые станции из активного набора, таким образом уменьшая мощность передачи. Однако этот подход требует значительной сигнализации в инфраструктуре, и поэтому, относительно медленный. Это делает трудным быстрое переключение на передачу от другой базовой станции, когда ее сигнал становится более сильным сигналом.
Другой случай, в котором это изобретение обеспечивает преимущество, это, когда одна базовая станция принята в подвижной станции с более низким уровнем сигнала, чем другая базовая станция, но еще выше порога исключения. В условиях с малым замиранием предпочтительно вести передачу только от базовой станции, сигнал которой принимается в подвижной станции как более сильный. Однако удаление базовой станции из активного набора, а затем использование процедур передачи обслуживания для восстановления ее в активном наборе, добавляет значительную задержку в случае, когда этот пилот-сигнал становится сильнее. Эта задержка снижает качество линии связи и может привести к сбросу вызовов.
Фиг. 3 представляет блок-схему подвижной станции 18. Антенна 30 присоединена через диплексер 32 к аналоговому приемнику 34 и усилителю мощности передачи 36. Диплексер 32 взаимодействует с антенной 30 таким образом, что через антенну 30 осуществляется одновременно передача и прием.
Принимая РЧ энергию от соответствующих базовых станций 12, 14 и 16 (фиг. 1), антенна 30 в то же время передает пилот-сигнал и сигналы кодового канала, направляемые через диплексер 32 к аналоговому приемнику 34. Аналоговый приемник 34 принимает РЧ энергию от диплексера 32 и выполняет функцию управления мощностью разомкнутого контура для регулирования мощности передачи подвижной станции для передачи на обратной линии связи (т.е., от подвижной станции к базовой станции). Более конкретно, приемник 34 генерирует аналоговый сигнал управления мощностью, который подается к схеме управления мощностью передачи 38, как описано в патенте US 5056109, озаглавленном "Способ и устройство для управления мощностью передачи в системе сотовой подвижной телефонной связи МДКР". Регулирование управления мощностью замкнутого контура выполняется управляющим процессором 46 с использованием потока бит управления мощностью обратной линии связи, который был передан по прямой линии связи и демодулирован приемниками цифровых данных 40, 42 и 45. Аналоговый приемник 34 преобразует принятую РЧ энергию в модулирующий сигнал и преобразует его в цифровую форму.
Преобразованный в цифровую форму выходной сигнал от аналогового приемника 34 подается к приемнику поиска 44 и приемникам цифровых данных 40, 42 и 45, которые работают под управлением управляющего процессора 46, принимают кодовые каналы от соответствующих базовых станций и подают соответствующие выходные сигналы к объединителю разнесения/декодеру 48. Объединитель разнесения/декодер 48 объединяет соответствующие выходные сигналы от приемников 40, 42 и 45 на основании выбранной схемы объединения, описанной позднее более подробно.
Хотя на фиг.3 показаны три приемника цифровых данных 40, 42 и 45, объединитель разнесения/декодер 48 обычно оборудован для связи с несколькими дополнительными приемниками цифровых данных. Предпочтительно, количество приемников цифровых данных, включенных в подвижную станцию 18, эквивалентно максимальному количеству кодовых каналов (считая за отдельные прямые сигналы и сигналы многолучевого распространения, получаемые от каждого кодового канала), которые подвижная станция будет применять в своей схеме объединения. Как будет описано, дополнительное усиление разнесения возможно при включении дополнительных приемников данных, и настоящее изобретение применимо к любому количеству приемников цифровых данных (или многоканальному приемнику цифровых данных сигнала).
Приемники цифровых данных 40, 42 и 45 взаимодействуют с объединителем разнесения/декодером 48, чтобы сформировать структуру "собирающего" приемника (рейк-приемника). Объединитель разнесения/декодер 48 взаимодействует с каждым из соответствующих приемников 40, 42 и 45, которые служат как три "направления" (ветви) в сборке. Более конкретно, приемники 40, 42 и 45 могут быть установлены управляющим процессором 46 для приема кодовых каналов от разных базовых станций или сигнала многолучевого распространения от общей базовой станции. Таким образом, все три приемника 40, 42 и 45 могут быть использованы так, чтобы принимать кодовые каналы от трех разных базовых станций, или сигнала кодового канала от базовой станции, который поступает через три разных пути сигнала (т.е. три сигнала многолучевого распространения). Должно быть ясно, что приемники 40, 42 и 45 могут быть использованы для приема любой комбинации сигналов многолучевого распространения и кодовых каналов от разных базовых станций. Структура собирательного приемника может быть также выполнена в виде многих других конфигураций на основании, например, комбинаций нескольких одноканальных приемников, многоканальных приемников (т. е. , имеющих, по меньшей мере, один канал) и объединителей разнесения. Кроме того, функция объединителя разнесения может быть включена в управляющий процессор 46 или в один из приемников 40, 42, 44 и 45.
В предпочтительном примере осуществления выходной сигнал объединителя разнесения/декодера 48 пропускается к устройству обращенного перемежения и декодеру. Выходной сигнал декодера обычно пропускается через блок управления, который расщепляет принятый поток данных на данные конечного пользователя и данные управления. Данные конечного пользователя подаются к устройству данных, например, кодеру речи.
Данные, выдаваемые из устройства данных, например, кодера речи, должны быть переданы по обратной линии связи к базовым станциям, находящимся в активном наборе подвижной станции. Выходной сигнал схемы цифрового модулирующего сигнала пользователя 50 является модулирующим сигналом, который форматирован, закодирован, перемежен и пропущен к модулятору передачи 52, где он модулируется. Выходной сигнал модулятора передачи 52 пропускается через устройство управления мощностью передачи 38 под управлением управляющего процессора 46. Схема управления мощностью передачи 38 регулирует выходную мощность подвижной станции 18 (фиг.1) на основании сигнала уровня мощности, подаваемого аналоговым приемником 34, и бит управления мощностью замкнутого контура, и выходной РЧ сигнал пропускается к усилителю мощности передачи 38, который усиливает выходной сигнал и пропускает усиленный выходной сигнал через диплексер 32 и передает через антенну 30.
Преобразованный в цифровую форму сигнал ПЧ от аналогового приемника 34 содержит сигналы кодового канала и пилот-сигналы, передаваемые базовыми станциями, находящимися в активном наборе пилот-сигнала вместе с другими сигналами МДКР, которые действуют в качестве помехи для подвижной станции 18. Функцией приемников 40, 42 и 45 является коррелирование выборки ПЧ, определенной ПШ последовательностью. Этот процесс корреляции обеспечивает "усиление обработки", которое повышает отношение сигнал-шум сигнала, предназначенного для подвижной станции, путем согласования ПШ последовательности, используемой в соответствующих кодовых каналах для кодирования сообщения, посылаемого к подвижной станции. Не предназначенные сигналы, которые не были закодированы согласованной ПШ последовательностью, "расширяются" процессом корреляции, таким образом понижая отношение сигнал-шум для непредназначенных сигналов. Выходной сигнал корреляции когерентно детектируется с использованием несущей частоты пилот-сигнала в качестве эталона фазы несущей частоты. Результатом этого процесса детектирования является последовательность закодированных символов данных.
Приемник поиска 44 под управлением управляющего процессора 46 сканирует принятые каналы пилот-сигнала и каналы пилот-сигнала многолучевого распространения от базовой станции через прямые лучи и отраженные лучи (например, многолучевого распространения). Сканер приемника 44 использует отношение энергии принятого пилот-сигнала на элементарную посылку (Еc) к общей принятой спектральной плотности, шума и сигналов, обозначенное как Ec/Io, в качестве меры качества принятого пилот-сигнала. Приемник 44 подает сигнал измерения уровня сигнала управляющему процессору 46, показывая соответствующие каналы пилот-сигнала и их уровни.
Схема объединителя разнесения декодера 48 регулирует синхронизацию введенных принятых сигналов и складывает их вместе. Этому процессу сложения может предшествовать умножение соответствующих введенных сигналов на весовой коэффициент, соответствующий относительным уровням сигналов каналов пилот-сигнала соответствующих соответствующим входным сигналам. Весовой коэффициент основан на уровне пилот-сигнала, потому что предполагается, что качество соответствующего каждого пилот-сигнала соответствует качеству сигналов, переданных на кодовом канале соответствующей базовой станции. При использовании весового коэффициента объединитель выполняет процедуру объединения разнесения с максимальным отношением. Результирующий поток объединенного сигнала затем декодируется с использованием декодера с детектированием ошибок прямого потока, который также содержится в схеме объединителя разнесения/декодера 48. Способ взвешивания на основании пилот-сигнала действует хорошо, когда базовые станции, находящиеся в активном наборе, передают сигналы кодовых каналов к подвижной станции в равной пропорции с пилот-сигналом. То есть, отношение мощности кодового канала к мощности пилот-сигнала одно и то же во всех членах активного набора. Если это отношение не одно и то же, тогда могут быть предпочтительны другие способы взвешивания. Например, базовая станция может посылать к подвижной станции, в сигнальном сообщении или каким-либо другим средством, отношение мощности канала трафика к мощности канала пилот-сигнала, используемое всеми базовыми станциями, содержащимися в активном наборе. Затем, если относительная доля для базовой станции j равна αj, подвижная станция может объединять кодовые каналы, используя веса  где γj есть относительная принятая мощность пилот-сигнала для базовой станции j в подвижной станции. Или же подвижная станция может оценивать αj или αjγj из принятого сигнала от базовой станции j.
где γj есть относительная принятая мощность пилот-сигнала для базовой станции j в подвижной станции. Или же подвижная станция может оценивать αj или αjγj из принятого сигнала от базовой станции j.
Схема модулирующего сигнала 50 включает интерфейсы данных кода речи (вокодера) и другие функции обработки модулирующего сигнала. Кроме того, схема цифрового модулирующего сигнала пользователя 50 обеспечивает интерфейс к схемам ввода/вывода (I/O), таким как телефонная трубка, которая вводит речевой сигнал в цифровой преобразователь и вокодер (кодер речи), содержащиеся в ней. Выходной сигнал схемы цифрового модулирующего сигнала пользователя 50 подается к модулятору передачи 52, который модулирует кодированный сигнал на сигнал несущей частоты ПШ, ПШ последовательность которого соответствует функции назначенного адреса для исходящего вызова. Эта ПШ последовательность определяется управляющим процессором 46 из информации установления вызова, которая передается базовой станцией (12, 14 или 16) и декодируется приемниками (40, 42 или 45).
Выходной сигнал модулятора передачи 52 подается к схеме управления мощностью передачи 38, в которой мощность передачи сигнала регулируется аналоговым сигналом управления мощностью, подаваемым от приемника 34. Кроме того, управляющие биты передаются базовой станцией в виде команд регулирования мощности, на которые реагирует схема управления мощностью передачи 38. Схема управления мощностью передачи 38 выдает модулированный сигнал управления мощностью к схеме усилителя мощности передачи 36, которая усиливает и преобразует модулированный сигнал в РЧ частоту. Усилитель мощности передачи 36 включает усилитель, который усиливает мощность модулированного сигнала до конечного выходного уровня. Усиленный выходной сигнал затем пропускается к диплексеру 32, который присоединяет этот сигнал к антенне 30 для передачи к базовым станциям 12, 14 и 16. Сигналы, предназначенные для контроллера системы, принимаются базовыми станциями 12, 14 и 16 и соответственно пропускаются к контроллеру системы 10, в котором они объединяются.
Фиг. 4 представляет график характеристики приемника с разнесением, измеренной в вероятности частоты поступления ошибок в кадрах в зависимости от Eb/No, где приемник с разнесением выполняет объединение с максимальным отношением. Показаны четыре типовых кривых, представляющих вероятность частоты поступления ошибок в кадрах, соответственно представляющие приемник подвижной станции, имеющий одно направление (М=1), два направления (М=2), три направления (М=3) или четыре направления (М=4), конфигурированный так, чтобы принимать сигналы от соответствующего количества базовых станций. Сравнивая кривые для М=1 и М=2, видно, что характеристика приемника, имеющего два направления и обрабатывающего два луча, лучше, чем характеристика приемника, обрабатывающего один луч. Это сравнение сделано путем наблюдения, для данной частоты появления ошибок в кадрах (т.е. штриховая линия), расстояния между соответствующими кривыми вероятности ошибок в кадрах. В иллюстрируемом графике улучшение характеристики показано расстоянием M1-2. Подобным образом, если подвижная станция использует приемник с разнесением, имеющий три направления, достигается улучшение характеристики М2-3, где, в общей, M2-3 меньше, чем улучшение характеристики M1-2. Подобным образом добавление четвертого направления к приемнику разнесения обеспечивает улучшение характеристики, показанное как М3-4. Следует отметить, что М3-4 меньше, чем М2-3 и M1-2. Таким образом, если бы подвижная станция была единственной подвижной станцией в системе МДКР, приемники с разнесением, имеющие возрастающее количество направлений, принимающие соответствующее количество передач от базовых станций, обеспечивали бы непрерывно улучшающиеся характеристики, хотя это улучшение станет минимальным для большого М. Кроме того, вышеупомянутое отношение характеристик предполагает, что в процессе объединения не участвуют направления, содержащие только шум (или практически только шум). Абсолютная величина улучшения зависит от условий связи (например, величины замирания, типа замирания, импульсивности шума, расстояния до базовой станции, и т.п.).
Во время мягкой передачи обслуживания на пропускную способность системы оказывается различное воздействие путем использования процессов объединения разнесения на прямой линии связи и обратной линии связи. Например, на обратной линии связи подвижная станция передает к базовым станциям 12, 14 и 16 через тракты 20а, 22а и 24а (фиг.1), соответственно. Каждая из базовых станций принимает передачу от подвижной станции 18 и направляет ее к контроллеру системы (селектору) 10, который объединяет соответствующие сигналы, поданные базовыми станциями 12, 14 и 16, используя процесс объединения разнесения. Поскольку передачу ведет только одна подвижная станция 18, на пропускную способность системы не оказывается вредного посредством использование объединения разнесения.
Однако на прямой линии связи подвижная станция 18 объединяет различные сигналы (все имеющие одинаковую кодированную информацию), передаваемые от базовых станций 12, 14 и 16. В уровне технике известны разные способы объединения, включая объединение с максимальным отношением, объединение с одинаковым усилением, и простой выбор, посредством которого выбирается один сигнал для обработки, а другие сигналы отбрасываются. Обеспечение дополнительного и, вероятно, большого количества базовых станций в активный набор подвижной станции определенно улучшит характеристику, наблюдаемую в подвижной станции, но может в действительности уменьшить общую пропускную способность системы МДКР, поскольку дополнительные передачи от базовых станций, передающих к первой подвижной станции, окажутся фоновой помехой для второй подвижной станции. Отдача конкретного кодового канала зависит от разных факторов, включая его уровень относительно кодовых каналов от других базовых станций.
Общая мощность, излучаемая в системе связи МДКР, обычно меньше, если имеется достаточное усиление в разнесении. Однако, как выяснилось согласно настоящему изобретению, общая мощность, которая излучается, обычно больше, чем та, которая требуется для адекватной характеристики, даже если дополнительное разнесение не требуется. Действует ли увеличение или уменьшение величины излучаемой мощности от каждой из базовых станций, зависит от характеристик трактов передачи между базовыми станциями и подвижной станцией. В соответствии с одним примером осуществления этого изобретения, общая мощность передачи от системы МДКР устанавливается к более оптимальной рабочей точке путем усиления координации между подвижной станцией 18 и контроллером системы (селектором) 10. Далее следует описание того, как объединить в подвижной станции информацию, требуемую, чтобы система могла работать с большей пропускной способностью.
Фиг. 5А представляет график изменения Ес/Iо в зависимости от времени для области мягкой передачи обслуживания, в которой три пилот-сигнала А, В и С от соответствующих базовых станций включены в активный набор подвижной станции. Во время прохождения области мягкой передачи обслуживания, как видно из фиг. 5А, изменения в соответствующих каналах связи для пилот-сигналов А (показан точечной линией), В (показан штриховой линией), и С (показан сплошной линией) вызывают изменения в уровне сигналов, и таким образом, отношения сигнал-шум, что приводит к колебаниям соответствующих пилот-сигналов А, В и С. Именно эти изменения дают значительный потенциал для улучшения усиления разнесения, и настоящее изобретение показывает, как использовать усиление разнесения так, чтобы максимизировать пропускную способность системы путем быстрого изменения распределения мощности прямого канала трафика.
Относительные уровни качества пилот-сигналов (качество пилот-сигнала) пилот-сигналов А, В и С колеблются от кадра к кадру, и, как видно из фиг.5А, любой из сигналов А, В и С изменяется по отношению сигнал-шум (ОСШ) относительно других сигналов. Например, в первом кадре пилот-сигнал А обеспечивает самое большое ОСШ, в то время как пилот-сигнал В обеспечивает наименьшее ОСШ. Однако в кадре 2 относительные отношения сигнал-шум пилот-сигналов В и С пересекаются (как показано на фиг.5А), и в конце кадра 2 ОСШ пилот-сигнала В больше ОСШ пилот-сигнала С.
Фиг.5В идентична фиг.5А, но включает уровень Δr (показанный как линия из крестиков х), вычисленный управляющим процессором 46 (фиг.3) подвижной станции 18, где Δr представляет собой фиксированный уровень Δ ниже самого сильного отношения сигнал-шум пилот-сигналов А, В и С в активном наборе подвижной станции. Предпочтительно, Δr есть одно число, полученное управляющим процессором 46, хотя альтернативно могут быть использованы варианты Δr (т. е. множество Δ) так, чтобы использовались градации для обеспечения более точного разрешения качества пилот-сигналов. Управляющий процессор 46 вычисляет пороговый сигнал Δr предпочтительно непрерывно, хотя альтернативно может быть получен отрывочный или дискретный Δr.
Как показано на фиг.5В, во время первого кадра только пилот-сигнал А находится у порогового сигнала Δr или выше него, что, в этом примере, установлено самим пилот-сигналом А (т.е. пилот-сигнал А имеет самое большое ОСШ, и таким образом, Δr основано на уровне ΔdВ ниже ОСШ, установленного пилот-сигналом А). Следует отметить также, что сигналы В и С не находятся на уровне сигнала Δr или выше него. Соответственно, фиг.5В показывает в кадре 1, что пилот-сигнал А (как отмечено символом "А", написанным сверху оси "ВРЕМЯ" в первом кадре) находится у сигнала Δr или выше него и имеет наибольшее среднее ОСШ в этом прошедшем интервале кадра. В кадре 2 наибольшее ОСШ есть ОСШ сигнала А, за ним следует пилот-сигнал В, а наименьшее у пилот-сигнала С, и все они выше Δr в конце кадра. В кадрах 3 и 4 только пилот-сигналы А и В выше Δr. В кадре 5 пилот-сигнал С имеет наибольшее ОСШ (и таким образом, Δr вычисляется на основании пилот-сигнала С). Пилот-сигнал А затем является следующим по уровню сигналом, и он больше, чем ОСШ пилот-сигнала В, и все они выше Δr.
Путем вычисления Δr и сравнения Δr с каждым из соответствующих сигналов от базовых станций, находящихся в активном наборе, подвижная станция может эффективно собрать значительное количество информации, относящейся к конкретным каналам связи в данном кадре. Эта характеристика каналов связи может быть использована подвижной станцией путем конфигурирования приемника с разнесением подвижной станции и объединителя для оптимального обнаружения сигналов, передаваемых от соответствующих базовых станций. Дополнительно, в соответствии с одним примером осуществления этого изобретения, характеристика системы связи МДКР также оптимизирована частой передачей пилот-сигналов с наилучшим качеством в активном наборе к контроллеру системы, так что контроллер системы может выполнять соответственные регулирования распределения мощности прямого канала трафика между базовыми станциями, находящимися в активном наборе. Информация быстро передается к контроллеру 10 системы (фиг. 1), потому что оптимальное количество и выбор передающих базовых станций не остаются постоянными по мере того, как относительные ОСШ сигналов от каждой базовой станции быстро изменяются от кадра к кадру, как показано на фиг.5.
Следует также отметить, что величина Δ, которая используется для вычисления Δr, может быть предварительно записана в подвижной станции, или она может быть послана к подвижной станции через сигнальное сообщение или каким-либо другим способом управления. Следует также отметить, что фигуры 5А и 5В описаны в контексте кадров, которые могут соответствовать кадрам, используемым для кадровой синхронизации данных, перемежения и кодирования на канале трафика, как описано в стандарте IS-95. Однако в этом изобретении это не обязательно, и кадры, показанные на фиг. 5А и 5В, могут не соответствовать какому-либо конкретному интервалу обработки и могут быть либо короче, либо длиннее типовой длительности 20 мс. Кроме того, различные передачи, описанные выше, генерируются различными базовыми станциями. Однако изобретение также применимо к любому элементу, излучающему сигнал прямой линии связи. В частности, изобретение применяется к разным антеннам на одной и той же базовой станции, излучающим один и тот же сигнал. Например, сигналы А, В и С на фиг. 5А и 5В могут быть от разных антенн одной и той же базовой станции, как могло бы быть в случае, где имеются три антенны на одной базовой станции.
Следует также понимать, что набор сигналов А, В и С, показанных на фигурах 5А и 5В, может исходить от любой комбинации базовых станций и антенн на базовой станции. Например, сигналы А и В могут исходить от двух разных передающих антенн базовой станции 17, а сигнал С может быть передан от базовой станции 19. Сигналы А, В и С могут быть
сигналами прямых линий связи с множеством несущих частот, все переданные от одной и той же базовой станции, или могут быть сигналами от разных антенн, излучающих сигналы прямой линии связи с множеством несущих частот. Например, если базовая станция 17 передает три несущих частоты от двух антенн, тогда сигнал А может содержать две несущих частоты, а сигнал В - одну несущую частоту. Сигнал А может состоять из двух разных отдельных сигналов несущей частоты, однако в этом случае обе эти несущие частоты излучаются от одной и той же антенны и будут приняты подвижной станцией по существу с одинаковым уровнем, при условии, что они переданы с одинаковым уровнем. Должно быть также ясно, что в реальной системе может быть гораздо больше, чем три сигнала (которые показаны на фиг. 5А и 5В), которыми отслеживается подвижная станция.
Чтобы быстро обеспечить контроллер 10 системы (фиг.1) этой информацией, настоящее изобретение предлагает новый протокол связи между подвижной станцией и контроллером 10 системы, описанный здесь со ссылкой на фиг.6А-6С. Фигуры 6А-6С показывают чередующиеся формы сигнализации или управляющих сообщений в виде сообщения вектора бит, сообщаемого контроллеру (селектору) 10 системы через сигнал обратной линии связи, передаваемый от подвижной станции 18 к селектору 10 посредством одной или более базовых станций (12 и 14). Сообщение вектора бит предпочтительно передается на покадровой основе, хотя более частое сообщение, так же, как менее частое сообщение, являются альтернативами.
В одном примере осуществления этого изобретения используется сигнал многоканальной обратной линии связи, причем сигнал обратной линии связи состоит из набора каналов ортогональных кодов, определяемых набором кодов Уолша способом, подобным прямой линии связи. В исполнении многоканальной обратной линии связи сообщение вектора бит предпочтительно передается через один из каналов ортогонального кода в обратной линии связи так, чтобы минимизировать время задержки до того, как контроллер системы может пользоваться информацией, содержащейся в сообщении бит-вектора. Система и способ для передачи данных с использованием такого сигнала обратной линии связи описаны в одновременно рассматриваемой заявке на патент US 08/654443, озаглавленной "Система радиосвязи МДКР с высокой скоростью передачи данных".
В альтернативном примере осуществления этого изобретения используется сигнал обратной линии связи с одним кодовым каналом, такой, как используется в системе, согласующейся с IS-95. Сообщение бит-вектора предпочтительно передается вместе с другими данными пользователя в одном кодовом канале путем мультиплексирования по времени или прокалыванием бит вектора данных в ПШ коде обратной линии связи.
Фиг. 6А показывает структуру данных сообщения бит-вектора качества пилот-сигнала, генерируемого подвижной станцией и передаваемого к контроллеру 10 системы через базовые станции. В частности, фиг.6А показывает 10-битное сообщение вектора, которое коротко по длине, но способно сообщить контроллеру системы 10, какой из пилот-сигналов в активном наборе подвижной станции имеет качество сигнала, равное или выше данного стандарта (например, порогового сигнала Δr на фиг.5В). Сообщение бит-вектора не обязательно должно быть ограничено 10 битами и может иметь другие форматы, отличающиеся от бит-вектора, хотя желательно иметь короткое сообщение. Для того, чтобы уменьшить количество передаваемых бит, сообщение бит-вектора предполагает расположение соответствующих каналов пилот-сигнала на основе начального порядка следования пилот-сигналов, идентифицированных к подвижной станции от контроллера системы в сообщении направления передачи обслуживания.
Стандарт МДКР IS-95 позволяет до шести элементов (пилот-сигналов) в активном наборе, все из которых могут быть включены в сообщение бит-вектора качества пилот-сигнала. На фиг.6А пилот-сигнал, имеющий наилучшее качество (т. е. наибольшее отношение сигнал-шум), как определено с помощью процесса, описанного со ссылкой на фиг.5В, идентифицирован индексом трехбитового поля данных, который однозначно идентифицирует его положение, как первоначально было указано подвижной станции в сообщении направления передачи обслуживания. Индекс обозначен на фиг.6А трехбитовым полем I1, I2 и I3. Таким образом, если канал пилот-сигнала от второй базовой станции, сообщенный подвижной станции в последнем сообщении направления передачи обслуживания, принят с наибольшим ОСШ, трехбитовый индекс устанавливается в два (двоичное 010), или альтернативно 1, если индекс изменяется от 0 до 8.
Битовые поля U1, U2, U3, U4, U5 и U6 каждое относится к соответствующим пилот-сигналам, как они первоначально записаны в сообщении направления передачи обслуживания и показывают, принят ли соответствующий канал пилот-сигнала выше сигнала порога Δr. Например, бит в полях данных U1-6 установлен в 1 (или альтернативно в 0), показывая контроллеру системы 10, что канал пилот-сигнала, соответствующий этому положению бита, принят равным или выше сигнала порога Δr. В частности, если U1 установлен в 1, контроллер системы 10 узнает, что первый пилот-сигнал, идентифицированный в последнем сообщении направления передачи обслуживания, имеет отношение сигнал-шум в подвижной станции, равное или выше Δr, которое вычислено управляющим процессом 46. U2-6 также устанавливаются процессором 46 предпочтительно на покадровой основе и передаются к контроллеру 10 системы через базовые станции в сообщениях бит-вектора.
Последний элемент поля данных, Нm, является порядковым номером сообщения направления передачи обслуживания. Поле данных Нm используется для того, чтобы обеспечить контроллер системы 10 идентификацией активного набора, на который подвижная станция ссылается. Нm может быть длиной несколько бит; или же оно может быть одним битом. Для случая одного бита Нm может быть последним битом порядкового номера. Так, если базовая станция посылает сообщение направления передачи обслуживания с порядковыми двоичными номерами, равными "100" и вслед за ним "101", тогда подвижная станция возвратит "1" в Нm, если она ссылалась на сообщение направления передачи обслуживания с порядковым номером "101", и возвратит "0" в Нm, если бы она ссылалась на сообщение направления передачи обслуживания с порядковым номером "100". Включением порядкового номера базовая станция может положительно определить, на какой пилот-сигнал ссылается подвижная станция в трехбитовом поле данных I1, I2 и I3 и в наборе U1, U2, U3, U4, U5 и U6.
В примере осуществления этого изобретения, которое включает прямую линию связи с множеством несущих частот, вектор бит U1, U2, U3, U4, U5 и U6 может быть расширен до N•M бит, где в активном наборе имеется N возможных базовых станций и имеется М возможных антенн на базовой станции. Или же М может соответствовать количеству возможных прямых линий связи с множеством несущих частот на базовой станции. В этом примере осуществления подвижная станция сообщает самую сильную из N•М прямых линий связи с множеством несущих частот вектором I1, I2 и I3 (который может потребоваться более длинным, чтобы учитывать необходимость идентифицирования самых больших элементов N•М), и сообщает, какие другие каналы с множеством несущих частот находятся выше Δr, используя вектор Ui. В альтернативном примере осуществления подвижная станция сообщает самую сильную базовую станцию, а не самую сильную несущую частоту, используя вектор I1, a затем сообщает, какие другие каналы с множеством несущих частот находятся выше Δr, используя вектор Ui.
Следует отметить, что Δr может быть отнесено либо к самой сильной базовой станции, или к самой сильной несущей частоте из всех базовых станций, находящихся в активном наборе подвижной станции. Дополнительно следует отметить, что самая сильная базовая станция может быть определена суммированием Ес/Iо пилот-сигналов от всех несущих частот прямой линии связи базовой станции с множеством несущих частот, как было выполнено с составляющими многолучевого распространения от одной и той же несущей, как это обычно используется в IS-95. Таким образом, общий уровень базовой станции задается суммированием Ес/Io от всех несущих частот прямой линии связи и всех составляющих многолучевого распространения на отдельной несущей частоте.
В ответ на сообщение битового поля контроллер системы 10 принимает сообщение измеренной мощности и, как будет описано здесь, определяет, какие из сигналов, содержащихся в активном наборе, следует удалить из прямых каналов трафика, а какие базовые станции должны продолжить передачу. То есть, контроллер системы 10 определяет, какие базовые станции передают сигналы, которые принимаются ниже порогового сигнала Δr, используя сообщение битового поля. Контроллер системы 10 затем дает указание идентифицированным базовым станциям остановить передачу канала трафика, направленную к соответствующей подвижной станции, которая, в свою очередь, уменьшает мощность передачи сигнала прямой линии связи, генерированного этими базовыми станциями. В альтернативном примере осуществления базовая станция вместо контроллера системы может принимать сообщение и определять, должна ли она осуществлять передачу по прямой линии связи. Этот способ уменьшает задержку, хотя он может быть менее надежным, когда подвижная станция находится в процессе мягкой передачи обслуживания, когда все базовые станции (или базовые станции, которые должны осуществлять передачу по прямой линии связи), могут не принимать передачу по обратному каналу.
Базовые станции отвечают не передачей канала трафика во время следующего кадра данных, направленного к соответствующей подвижной станции. Поскольку сигналы от идентифицированных базовых станций принимаются подвижной станцией 18 со значительно меньшим ОСШ, чем, по меньшей мере, сигнал другой прямой линии связи, увеличение частоты появления ошибок подвижной станции будет мало по равнению с уменьшением мощности передачи для всей системы. Хотя идентифицированные базовые станции прекращают передачу канала трафика, ресурсы обработки сигналов в этих базовых станциях останутся распределенными и готовыми начать передачу канала трафика по запросу контроллера системы 10. Также эти базовые станции предпочтительно продолжают обрабатывать сигнал обратной линии связи, передаваемый от подвижной станции 18.
По мере того, как связь продолжается, подвижная станция 18 продолжает контролировать относительный уровень пилот-сигналов, принимаемых от базовых станций из активного набора. Когда статус пилот-сигнала изменяется, например, когда пилот-сигнал принимается выше порога Δr, подвижная станция 18 генерирует другое сообщение битового поля, показывающее это изменение в состоянии. Подвижная станция 18 также генерирует сообщение битового поля, когда изменяется канал пилот-сигнала с наивысшим ОСШ. Контроллер системы 10 принимает сообщение битового поля и дает указание некоторой базовой станции в активном наборе, статус которой изменился, либо начать передачу канала трафика для подвижной станции, либо прекратить передачу канала трафика, в зависимости от обстоятельств. Каждая базовая станция отвечает передачей следующего кадра данных через канал трафика, если была команда начать передачу, или не передачей следующего кадра данных, если была команда прекратить передачу канала трафика.
В альтернативных примерах осуществления изобретения подвижная станция 18 генерирует сообщения битового поля периодически, например, один раз на каждый кадр. Путем сохранения ресурсов, назначенных в каждой базовой станции для передачи канала трафика, канал трафика может быть быстро включен и выключен в ответ на быстро изменяющиеся условия.
Еще в одном примере осуществления изобретения контроллер системы 10 включает поле регулирования усиления в каждый кадр данных, посылаемый к базовой станции. Поле регулирования усиления показывает усиление мощности передачи, с которым кадр должен быть передан от базовой станции. Когда контроллер системы 10 принимает вектор, показывающий, что канал пилот-сигнала от конкретной базовой станции принимается с уровнем, который меньше, чем на величину порога Δr ниже самого сильного канала пилот-сигнала, регулирование усиления в следующем кадре, направляемом к этому абоненту, уменьшается. Следующие кадры могут быть дополнительно уменьшены, по мере того, как дополнительные векторы показывают, что канал пилот-сигнала от этой базовой станции остается на пороговое значение Δr ниже самого сильного пилот-сигнала.
Контроллер системы 10 может также выполнить более полный анализ принятых векторов бит, чтобы лучше определить устойчивость среды, в которой работает подвижная станция. В частности, контроллер системы 10 может контролировать скорость, с которой отдельный канал пилот-сигнала изменяется от состояния выше до состояния ниже порога Δr. Если скорость изменения превосходит заданный порог, контроллер системы 10 определит, что подвижная станция находится в условиях замирания или в другой неустойчивой среде и что поэтому сигнал от каждой базовой станции при мягкой передаче обслуживания должен передаваться непрерывно. Когда такое определение сделано, контроллер системы 10 указывает всем базовым станциям из активного набора продолжать передачу канала трафика прямой линии связи, даже если некоторые каналы пилот-сигнала, обнаруживаются на порог Δr ниже наилучшего принятого канала пилот-сигнала.
Фиг. 6В показывает альтернативную структуру данных для сообщения вектора бит качества пилот-сигнала, передаваемого от подвижной станции к контроллеру системы 10 через базовую станцию. Этот альтернативный пример осуществления подобен по структуре структуре данных, определенной на фиг.6А, хотя включает только пять бит для идентификации шести элементов активного набора. Используется только пять бит, потому что идентификация шестого (т.е. базовой станции, обеспечивающей наибольшее отношение сигнал-шум) определяется первыми тремя битами сообщения вектора бит качества пилот-сигнала (т.е. I1-3). Путем однозначной идентификации самого сильного сигнала в первых трех битах сообщения вектора бит качества пилот-сигнала каждый из других элементов активного набора последовательно идентифицируется последовательными битами в сообщении вектора бит качества пилот-сигнала, при этом подразумевается понимание того, что нет бита, идентифицирующего положение самой сильной базовой станции.
Фиг.6С показывает дополнительный альтернативный формат сообщения вектора бит качества пилот-сигнала, в котором первые три бита I1-3 используются для однозначного идентифицирования сильнейшего пилот-сигнала базовых станций из активного набора, следующие три бита J1-3 идентифицируют второй по уровню сигнал, и третий набор из трех бит K1-3 идентифицирует третий по уровню пилот-сигнал элементов из активного набора. Таким образом, каждый из трех самых сильных пилот-сигналов элементов активного набора однозначно идентифицирован. Расширением этого примера осуществления было бы добавление дополнительных трех бит для каждого из четвертого или пятого, или шестого самого сильного пилот-сигнала от элементов активного набора, таким образом однозначно идентифицируя их. Дополнительным примером осуществления было бы добавление дополнительного бита к сообщению для указания относительного уровня пилот-сигналов в более точных уровнях квантования, а не просто выше или ниже порога Δr. Еще дополнительным примером осуществления было бы включение всех величин Ес/Iо для каждого пилот-сигнала. Таким образом, для системы с шестью возможными пилот-сигналами в активном наборе Ес/Iо были бы включены для каждого возможного пилот-сигнала в активном наборе. Должно быть также ясно, что посылка Ес/Iо самого сильного пилот-сигнала в активном наборе, а затем относительных величин Ес/Iо относительно этого самого сильного пилот-сигнала, является другим возможным примером осуществления. Хотя каждый из примеров осуществления от 6А до 6С определяет альтернативные способы сообщения относительных измеренных мощностей преимущественно на покадровой основе, комбинации этих альтернативных способов также возможны. Например, первые шесть бит сообщения измеренной мощности могут быть использованы для однозначного идентифицирования первых двух самых сильных пилот-сигналов элементов базовых станций, в то время как три следующих бита используются для идентифицирования относительных положений следующих по уровню трех пилот-сигналов (т. е. для набора из пяти элементов).
Дальнейшим альтернативным подходом было бы иметь только одну базовую станцию, передающую к подвижной станции. В этом случае требуется посылать только сообщение вектора из трех бит (т.е. I1-3) от подвижной станции к базовой станции. Альтернативным устройством является передача от базовой станции с множеством несущих частот только через одну антенну за один раз. В этом случае нужен один бит, чтобы определить, какая антенна может быть использована. Ясно, что это может быть использовано в комбинации со способами, описанными выше.
При связи по известным каналам с быстрым или медленным замиранием используется альтернативный пример осуществления для определения порога Δr, чтобы более эффективно преодолеть эффект замирания. В противоположность предпочтительному примеру осуществления, в котором Δr основано на пилот-сигнале с наибольшим средним ОСШ в кадре, в настоящем примере осуществления используется минимальная величина максимального пилот-сигнала для определения Δr. Таким образом, если по меньшей мере сильнейшие пилот-сигналы подвержены замиранию, установка порога Δr на минимум сильнейшего пилот-сигнала в кадре позволит, чтобы больше пилот-сигналов находились выше порога Δr. Соответственно, может быть достигнута большая величина усиления разнесения путем объединения сигналов от большего количества базовых станций, таким образом добавляя еще независимые или, по меньшей мере, полунезависимые тракты. Более конкретно, в условиях быстрого замирания вышеописанное использование минимальной величины для сильнейшего в кадре пилот-сигнала, как ожидается, должно достаточно хорошо действовать для сценария быстрого замирания, при котором длительности замираний ожидаются относительно малыми по сравнению с длиной кадра.
Однако для каналов с медленным замиранием эффективность собирающего приемника и подвижной станции не столь велика, как в случае условий с быстрым замиранием, в первую очередь потому, что перемежитель, используемый в процессе приема, не обеспечивает такого преимущества, какое он обычно обеспечил бы, когда замирания имели бы длительность меньшую, чем длина интервала перемежения. Однако в медленном замирании, при котором длительность замирания больше, чем интервал перемежителя, требуется большее Eb/No для обеспечения приемлемого качества связи в подвижной станции. Кроме того, длительность одного кадра слишком коротка для получения средней величины уровней соответствующих пилот-сигналов, чтобы определить, подвержены ли или нет соответствующие каналы медленному замиранию.
Соответственно, в этом альтернативном примере осуществления каждая из соответствующих базовых станций снабжена фильтром, который интегрирует и нормализует каждый из битов Uk (фиг.6А и 6В) в сообщении вектора бит. Если отдельные биты из битов Uk переключаются, т.е., по меньшей мере, однажды изменяют состояние, тогда это переключение показывает, что канал между соответствующей базовой станцией и подвижной станцией подвержен медленному замиранию. Соответственно, характеристика системы МДКР будет усовершенствована, если базовая станция, подверженная медленному замиранию, продолжит передачу на прямом канале трафика. Это наблюдаемое переключение может так же использоваться, как индикатор в контроллере системы, чтобы показать, должна ли подвижная станция быть помещена в область мягкой передачи обслуживания. Например, если битовое поле, представляющее уровень пилот-сигнала для данной базовой станции, почти всегда равно 0 или всегда равно 0, соответствующая базовая станция должна показать, что пилот-сигнал фактически значительно слабее, чем самый сильный пилот-сигнал, и базовая станция, дающая более слабый пилот-сигнал, не должна быть включена в активный набор, потому что она не добавляет практически полезной величины к характеристике подвижной станции. Должно быть также ясно, что подвижная станция может эффективно контролировать действие переключения и затеи передавать сообщение к базовой станции только тогда, когда она хочет изменить базовые станции, передающие к этой подвижной станции.
Другая альтернатива позволяет, чтобы процессы сигнализации и коммутации происходили быстрее. В этом случае подвижная станция сигнализирует базовой станции непосредственно во время замирания, когда сигнал от этой базовой станции становится сильнее или слабее, чем сигналы от других одной или более базовых станций. Базовая станция отвечает передачей или не передачей следующего кадра. В этом случае переключение может быть очень быстрым, потому что базовая станция может ответить быстрее, чем контроллер базовой станции, позволяя, чтобы первый кадр был послан от одной базовой станции, а следующий последовательный кадр был послан от другой базовой станции. Это действует при относительно средних скоростях замирания. Когда сигнализация и переключение еще быстрее, переключение может произойти в течение кадра. В этом случае базовая станция должна принимать данные для передачи во время кадра. В одном примере осуществления базовые станции кодируют, перемежают и дополнительно обрабатывают данные для передачи. Выходной поток данных разрешен или блокирован на основании обратной связи от подвижной станции.
В качестве альтернативы пороговому способу для определения того, какие пилот-сигналы идентифицировать в векторе бит качества пилот-сигнала, здесь описывается второй способ "назначения направления". В подвижной станции подвижная станция делает оценку Ес/Iо принятого пилот-сигнала от каждой базовой станции из активного набора. Если подвижная станция не имеет направления своего приемника с разнесением назначенного базовой станции Ес/Iо для этого пилот-сигнала устанавливается в 0. Если подвижная станция имеет направление приемника разнесения, распределенное данной базовой станцией, подвижная станция определяет среднее Ес/Iо на предыдущих 20 миллисекундах (предпочтительно, хотя альтернативно, могут быть использованы более длинные или более короткие интервалы усреднения) и сообщают эту величину. Период 20 мс соответствует длине кадра МДКР. Подвижная станция затем идентифицирует наибольший пилот-сигнал, имеющий наибольшую величину Ec/Io, и назначает индекс Аm. Для всех других пилот-сигналов в активном наборе подвижная станция устанавливает соответствующие значения бит в сообщении бит-вектора в 1, если величина Ec/Io для этого пилот-сигнала находится в пределах Δr величины Ec/Io для максимального пилот-сигнала. Если приемник имеет только N направлений, где N меньше 6, тогда не более N пилот-сигналов сообщаются в сообщении бит-вектора.
Поскольку направления приемника могут назначаться как лучам прямого сигнала, так и отраженным лучам (т.е. отражению многолучевого распространения), способ назначения направления предотвращает сообщение "слишком многих" базовых станций, как имеющих сигналы, которые могут быть использованы подвижной станцией. Например, если приемник с разнесением имеет три направления и только две базовые станции создают три сигнала с высшим качеством (т. е. прямые лучи от каждой базовой станции и отраженный сигнал), тогда нет необходимости для третьей базовой станции передавать к подвижной станции, потому что приемник не имеет достаточно направлений для ее приема. С другой стороны, если пилот-сигнал от третьей базовой станции периодически превосходит один из трех других сигналов, подвижная станция может тем не менее сообщить о всех трех станциях, как находящихся выше желаемого порога, потому что имеется много случаев, при которых приемник с разнесением будет объединять сигнал от третьей базовой станции. Так, в одном примере осуществления изобретения ОСШ пилот-сигнала для базовой станции сообщается на основании направления с наибольшим ОСШ, принятым от этой базовой станции.
Фиг. 7 есть блок-схема, показывающая предпочтительный способ для регулирования распределения мощности прямого канала. Процесс начинается с операции S1, при которой подвижная станция измеряет уровни пилот-сигналов (качество сигналов) всех пилот-сигналов в активном наборе подвижной станции. Процесс затем переходит к операции S3, где подвижная станция на основании измеренных уровней пилот-сигналов, полученных при операции S1, генерирует пороговый сигнал Δr. Сигнал Δr генерируется на основании пилот-сигнала, имеющего наибольшее ОСШ, по измерениям при операции S1. Процесс затем переходит к операции S5, при которой каждый из соответствующих пилот-сигналов, (пилот-сигнал)i сравнивается с сигналом Δr для определения, больше ли соответствующий (пилот-сигнал)i, чем Δr или равен ему. Эта операция сравнения выполняется, предпочтительно, за период длительности кадра в 20 миллисекунд и прекращается в конце периода кадра, хотя другие интервалы выборки, взятые в других точках в кадре или во множестве кадров, согласуются с этим примером осуществления. Если соответствующий (пилот-сигнал)i больше или равен Δr, бит в сообщении бит-вектора изменяется (смотри фиг.6А-6С) показывая, что соответствующий (пилот-сигнал)i больше, чем порог Δr. Однако, если при операции S5 определено, что (пилот-сигнал)i не больше или равен Δr, бит в сообщении бит-вектора устанавливается, чтобы показать, что соответствующий (пилот-сигнал)i меньше или равен Δr (предпочтительно установкой бита в "0").
После того, как вектор бит качества пилот-сигналов сформирован при операции S7 или S9, процесс переходит к операции S11, при которой подвижная станция посылает сообщение бит-вектора к базовым станциям, находящимся в активном наборе подвижной станции. В это время подвижная станция устанавливает цикл синхронизации, который используется в подвижной станции в качестве индикатора для подвижной станции, чтобы определить, когда подвижная станция должна регулировать свои направления на основании упреждения подвижной станцией регулирования контроллером системы 10 мощности в прямом канале трафика в ответ на ранее посланное подвижной станцией сообщение бит-вектора. Установкой цикла синхронизации (которая легко выполняется подсчетом последовательных кадров 20 мс в подвижной станции) подвижная станция определяет, когда произойдет изменение в передачах прямого канала трафика. После операции S11 процесс переходит к операции S13, при которой базовые станции принимают и ретранслируют вектор бит качества пилот-сигналов к контроллеру системы. После операции S13 процесс переходит к операции S15, при которой селектор в контроллере системы обрабатывает сообщение бит-вектора и создает управляющее сообщение, посылаемое к каждой из соответствующих базовых станций из активного набора подвижной станции, управляя тем, которая из базовых станций из активного набора подвижной станции должна передавать соответствующий кодовый канал к подвижной станции. Путем управления передачей от каждой из базовых станций из активного набора подвижной станции, общая мощность, излучаемая от базовых станций, находящихся в активном наборе подвижной станции, уменьшается.
Процесс затем переходит к операции S17, при которой после того, как таймер достигнет предела времени, подвижная станция регулирует направления в своем приемнике с разнесением в соответствии с базовыми станциями, идентифицированными как имеющие сигнал, равный или больший, чем Δr, как определено при операциях S7 и S9. Регулированием направлений подвижная станция объединяет принятую энергию только от тех базовых станций из активного набора подвижной станции, которые фактически передают на своих соответствующих кодовых каналах. После операции S17 процесс повторяется, при этом подвижная станция продолжает контролировать уровни соответствующих пилот-сигналов для каждой из базовых станций, находящихся в активном наборе подвижной станции.
Поскольку генерированное подвижной станцией отдельное сообщение бит-вектора и ответ базовой станции на сообщение бит-вектора основаны на заданном алгоритме, время, когда базовая станция изменяет распределение прямой линии связи, известно подвижной станции. Таким образом, подвижная станция может надежно объединять сигналы только от тех базовых станций, которые передают в настоящее время. Это дает преимущество, потому что объединение сигналов от базовых станций, которые не передают к конкретной подвижной станции, вызвало бы ненужную помеху, которая вводилась бы в обработку приема, отрицательно влияя на результат. Это привело бы к ухудшению характеристики, большей требуемой величины Eb/No и снижению пропускной способности. Подобным образом, если бы подвижная станция не объединила сигналы, которые передавались к подвижной станции, и которые были приняты с достаточным уровнем, произошло бы снижение пропускной способности.
В одном примере осуществления этого изобретения подвижная станция компенсирует ошибки передачи в приеме бит-вектора, принятого каждой базовой станцией, тем, что сначала пытается демодулировать принятый прямой кадр, предполагая, что сообщение было правильно принято и обработано базовой станцией. В большинстве случаев подвижная станция правильно демодулирует кадр. Однако, если кадр ошибочен, подвижная станция может попытаться использовать группу базовых станций, которые передают к подвижной станции, до того, как она послала самое последнее сообщение бит-вектора. Таким образом, если базовая станция не получила самое последнее сообщение бит-вектора, тогда подвижная станция попытается снова демодулировать кадр, используя группу базовых станций, которые использовались ранее. Это требует, чтобы подвижная станция поддерживала принятый сигнал от другой группы базовых станций в буфере. Затем подвижная станция использует данные в этом буфере, когда появилась ошибка. Эта обработка с коррекцией ошибок показана необязательными операциями S19 и S21 на фиг.7, как показано штриховой линией к операции S19.
Фиг.8 представляет блок-схему альтернативного способа для изменения распределения мощности прямого канала трафика для базовых станций, находящихся в активном наборе подвижной станции. Процесс начинается при операции S32, при которой подвижная станция измеряет уровень соответствующих пилот-сигналов каждой из базовых станций из активного набора подвижной станции. Затем, при операции S34 подвижная станция генерирует пороговый сигнал Δr на основании измеренных уровней пилот-сигналов. Затем при операции S36 подвижная станция сравнивает как прямые сигналы (прямые i), так и сигналы многолучевого распространения для каждой из соответствующих базовых станций, и сравнивает прямые сигналы и/или сигналы многолучевого распространения, чтобы определить, больше ли какой-либо прямой сигнал или сигнал многолучевого распространения, чем Δr или равен ему. Если прямой сигнал или отражение сигналов многолучевого распространения больше, чем Δr или равен ему, процесс переходит к операции S38, при которой приемник с разнесением назначает направление или направления прямому сигналу и/или сигналам многолучевого распространения, которые больше, чем Δr, как определено при операции S36. Соответственно, процесс затем переходит к операции S42. Однако, если при операции S36 определено, что никакой из прямых сигналов и сигналов многолучевого распространения соответствующих базовых станций не больше и не равен Δr, процесс переходит к операции S40, при которой никакое из направлений собирающего приемника и никакая схема объединителя не назначаются этой отдельной базовой станции. Процесс затем переходит к операции S42. Следует отметить, что Δr на фиг. 8 отличается от такового с фиг.7. На фиг.7 Δr используется для определения, сообщать ли о пилот-сигнале; на фиг.8 он используется для определения, назначать ли направление собирающего демодулятора. Раз это так, то Δr на фиг.8 обычно будет меньше, чем таковое на фиг.7.
При операции S42 подвижная станция посылает сообщение бит-вектора к базовой станции из активного набора, показывая назначение направления, выполненное в подвижной станции для прямого сигнала и сигналов многолучевого распространения. Если любой из прямого сигнала или сигналов многолучевого распространения больше, чем Δr, подвижная станция форматирует сообщение бит-вектора, показывая, что, по меньшей мере, прямой сигнал или отражение сигналов многолучевого распространения больше, чем Δr, или равно ему. Процесс затем переходит к операции S44, при которой базовая станция ретранслирует сообщение бит-вектора к селектору в контроллере системы, так, чтобы контроллер системы был проинформирован о назначении направлений, использованных в подвижной станции, и таким образом мог регулировать распределение мощности прямого канала трафика базовых станций, которые ведут передачу к подвижной станции, для каждой из базовых станций из активного набора подвижной станции. Процесс затем переходит к операции S46, при которой селектор посылает управляющее сообщение к базовым станциям, находящимся в активном наборе подвижной станции, показывая, какие из базовых станций должны передавать на своих соответствующих кодовых каналах, соответствующих назначению направлений, установленному подвижной станцией. Базовые станции ретранслируют управляющее сообщение к подвижной станции, так что подвижная станция уведомляется, что базовые станции были проинформированы о распределении контроллером системы мощности прямого канала трафика. Процесс затем переходит к операции S48, при которой подвижная станция регулирует направления в приемнике с разнесением в ответ на управляющее сообщение, генерированное контроллером системы.
Следует отметить, что любое управляющее сообщение, посланное от подвижной станции к базовой станции или от базовой станции к подвижной станции, может содержать ошибки. Может быть использована технология, подобная той, что была описана в связи с фиг.7. В этом случае, если подвижная станция не приняла управляющее сообщение от базовой станции или если она приняла кадр с ошибкой, она может демодулировать предыдущую группу базовых станций, которые передавали к подвижной станции.
В альтернативном способе для изменения распределения мощности прямого канала трафика операции от S1 до S15 те же самые, что и операции, показанные в предпочтительном способе с фиг.7, хотя базовая станция также передает к подвижной станции индикацию того, какие из базовых станций фактически передают на их соответствующих прямых каналах трафика. Таким образом, в этом альтернативном примере осуществления контроллер системы, а не подвижная станция управляет тем, какие из базовых станций ведут передачу к подвижной станции.
Это изобретение было описано с точки зрения установления порога относительно сильнейшего пилот-сигнала, как было описано в тексте и фиг.5А и 5В. Может быть использовано много альтернативных мер. В частности, также может быть использована одна, которая устанавливает бит Ui в "1" только тогда, когда пилот-сигнал значительно увеличивает общее Ес/Iо. Эта методика описана в одновременно рассматриваемой заявке на патент US 08/790497, озаглавленной "Способ и устройство для выполнения мягкой передачи обслуживания в системе радиосвязи".
Это изобретение было описано с точки зрения передачи полной прямой линии связи от группы базовых станций к подвижной станции. Система и способ для проведения линии связи с высокой скоростью передачи данных с использованием основного и дополнительного канала описаны в одновременно рассматриваемой заявке на патент US 08/798949, озаглавленной "Уменьшение мощности передачи для высокоскоростной линии связи МДКР при мягкой передаче обслуживания", и в одновременно рассматриваемой заявке на патент US 08/784281, озаглавленной "Дополнительный канал с высокой скоростью передачи данных для системы связи МДКР". В этой системе линии связи с высокой скоростью передачи данных прямая линия связи разделяется на основной и дополнительный каналы. Основной канал непрерывно передает от всех базовых станций, находящихся в активном наборе. Дополнительный канал передает от тех же базовых станций, что и основной канал, или от их подгруппы. Описанное здесь изобретение применимо к основному каналу, дополнительному каналу или к обоим каналам.
Фиг.9 есть диаграмма спектра прямой линии связи с множеством несущих частот, с передачей сигнала в широком спектре, и прямой линии связи с одной несущей частотой, с передачей сигнала в широком спектре. Хотя это полностью не показано на шкале, для случая с множеством несущих частот широкая полоса частот для каждой несущей частоты показана в 1,25 МГц, а для случая широкой полосы частот с одной несущей частотой широкая полоса частот равна 3,6864 МГц. Случай с множеством несущих частот имеет ряд преимуществ, включая то, что каждая несущая частота может быть передана от антенны, конфигурированной иным образом, что, в свою очередь, обеспечивает уникальную структуру замирания для каждой несущей частоты, уменьшая вероятность того, что все три несущих частоты подвергнутся замиранию одновременно, и что поэтому связь может быть прервана.
Фиг.10 представляет блок-схему системы передачи с множеством несущих частот, конфигурированной в соответствии с одним примером осуществления настоящего изобретения. Входные данные сверточно кодируются и прокалываются с помощью обычного кодера 100, и зашифрованные символы повторяются повторителем символов 102, чтобы добавить дополнительную избыточность. Блочный перемежитель 104 блочно перемежает повторенные символы в интервалы времени 20 мс, и перемеженные символы скремблируются через схему "исключающее ИЛИ" 106 децимированным длинным кодом, генерированным генератором длинного кода 108 и дециматором 110 в ответ на маску длинного кода пользователя. Скремблированные символы демультиплексируются демультиплексором 112 на три потока символов, каждый из которых передается на сигнале соответствующей несущей частоты.
Для каждого сигнала несущей частоты соответствующие потоки символов являются преобразованными КФМ (квадратурно-фазовой манипуляцией) с помощью преобразователей КФМ 114. Каждый символ КФМ модулируется одним и тем же канальным кодом Уолша с помощью модуляторов кода Уолша 116, и полученные элементарные посылки Уолша дополнительно модулируются синфазным расширяющим кодом ПШI и квадратурным расширяющим кодом ПШQ с помощью устройств расширения 118. ПШI и ПШQ предпочтительно одинаковы для каждой несущей. Затем каждый полученный расширенный символ преобразуется с повышением частоты в уникальную несущую частоту, предпочтительно, как показано на фиг.9, и передается. Фиг.10 показывает модуляцию одним и тем же канальным кодом Уолша для каждой несущей частоты; однако- канальный код Уолша может быть различный.
Фиг.11 представляет блок-схему части системы приема, используемой подвижным устройством, чтобы обработать сигнал с множеством несущих частот, когда она конфигурирована в соответствии с одним примером осуществления этого изобретения. Преобразованная с понижением частоты энергии РЧ фильтруется полосовым фильтром 200 до 5 МГц и преобразуются А/Ц преобразователем 202 на скорости 8•1,2288 МГц. В блоке фильтров 204 два участка по 1,25 МГц выборок дополнительно преобразуются с понижением частоты в цифровом виде в модулирующий сигнал с помощью генератора с цифровым управлением (ГЦУ) 1,2 МГц или необязательно ГЦУ 1,25 МГц, и ГЦУ 2,5 МГц, и три набора выборок фильтруются фильтром нижних частот к полосе частот 1,25 МГц. Этот фильтр нижних частот может быть согласованным фильтром приемника или его частью. Полученные наборы отфильтрованных фильтром нижних частот данных пропускаются к собирающему приемнику 210, который демодулирует и объединяет различные составляющие многолучевого распространения переданного сигнала. Полученные объединенные данные мягкого выбора пропускаются к устройству обращенного перемежения для восстановления первоначальной последовательности и последующего декодирования.
Очевидно, в свете вышеприведенного описания возможно множество модификаций и вариантов настоящего изобретения. Поэтому должно быть понятно, что в пределах объема приложенных пунктов формулы изобретения, это изобретение может быть практически выполнено иначе, чем здесь конкретно описано.
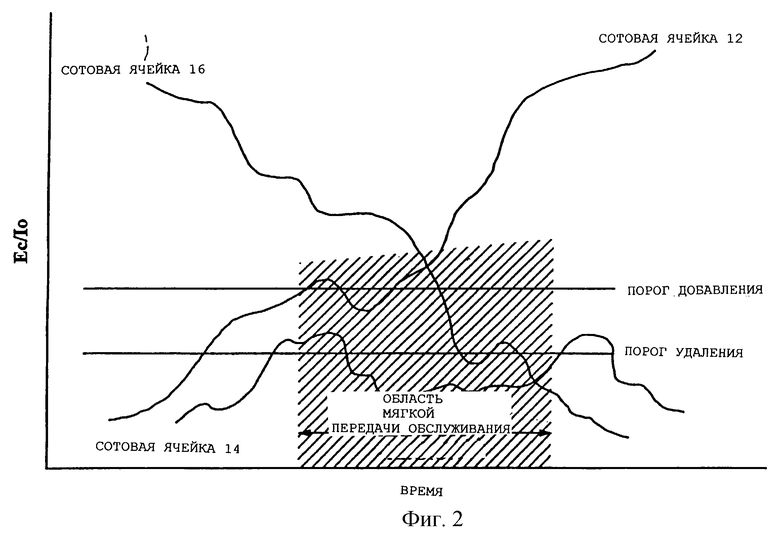
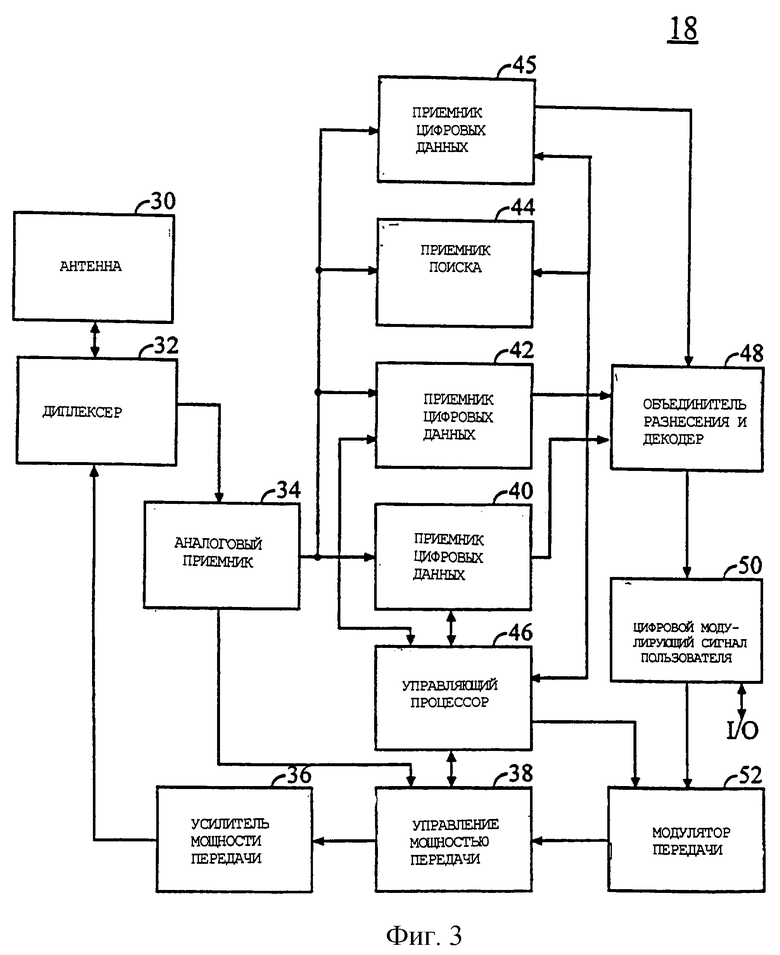
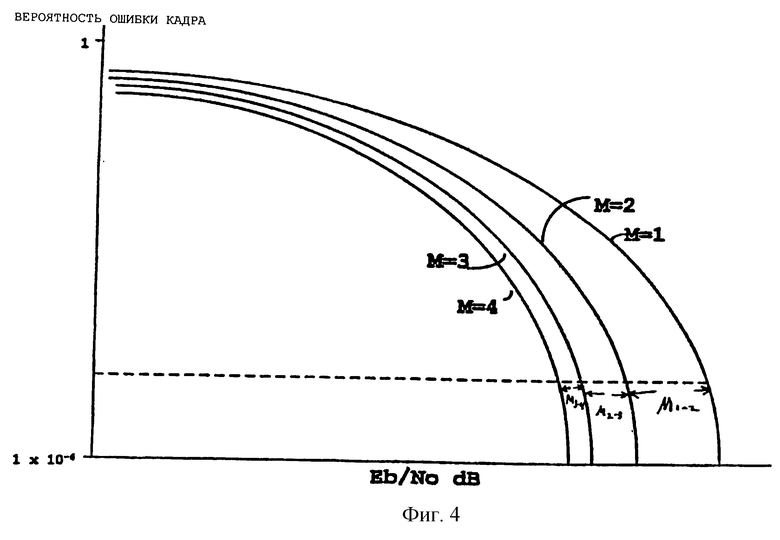
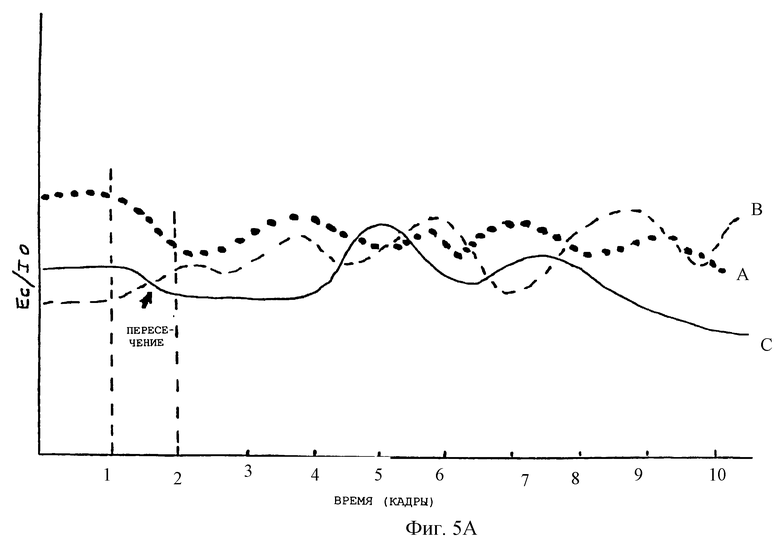
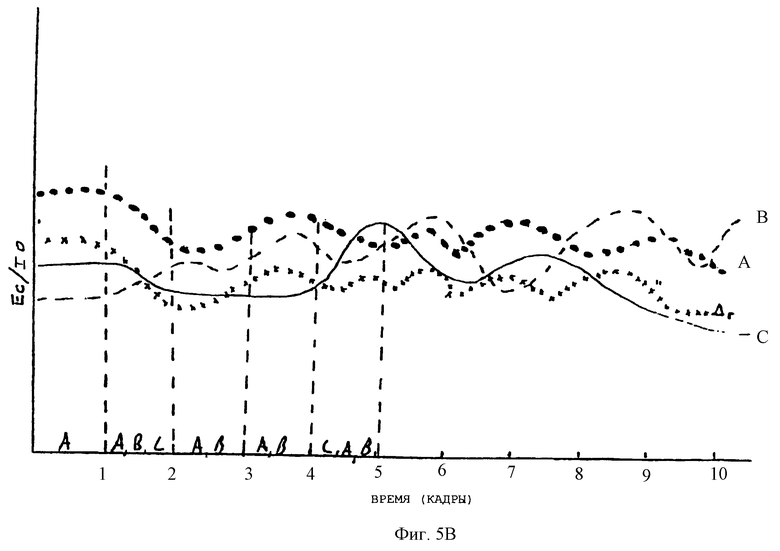
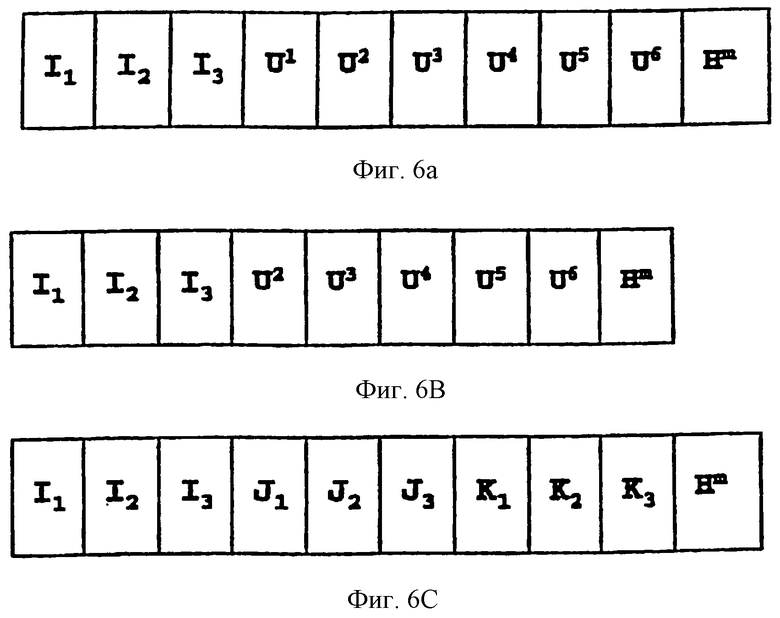
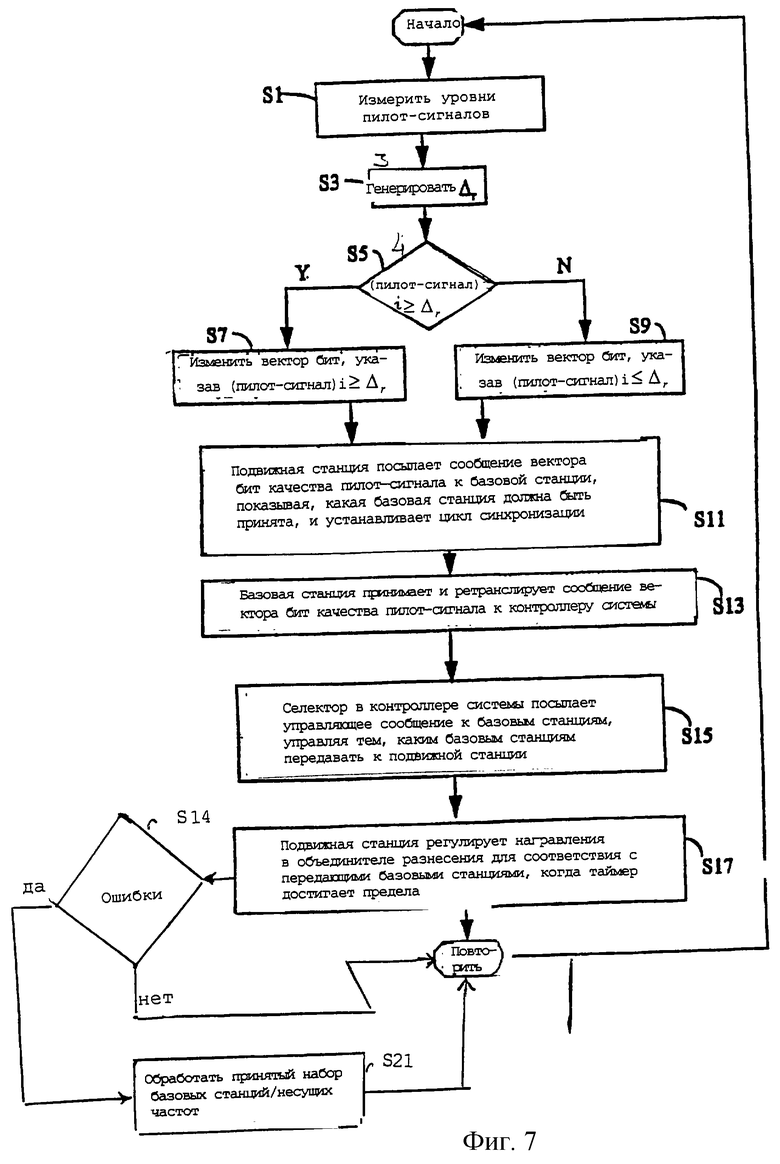
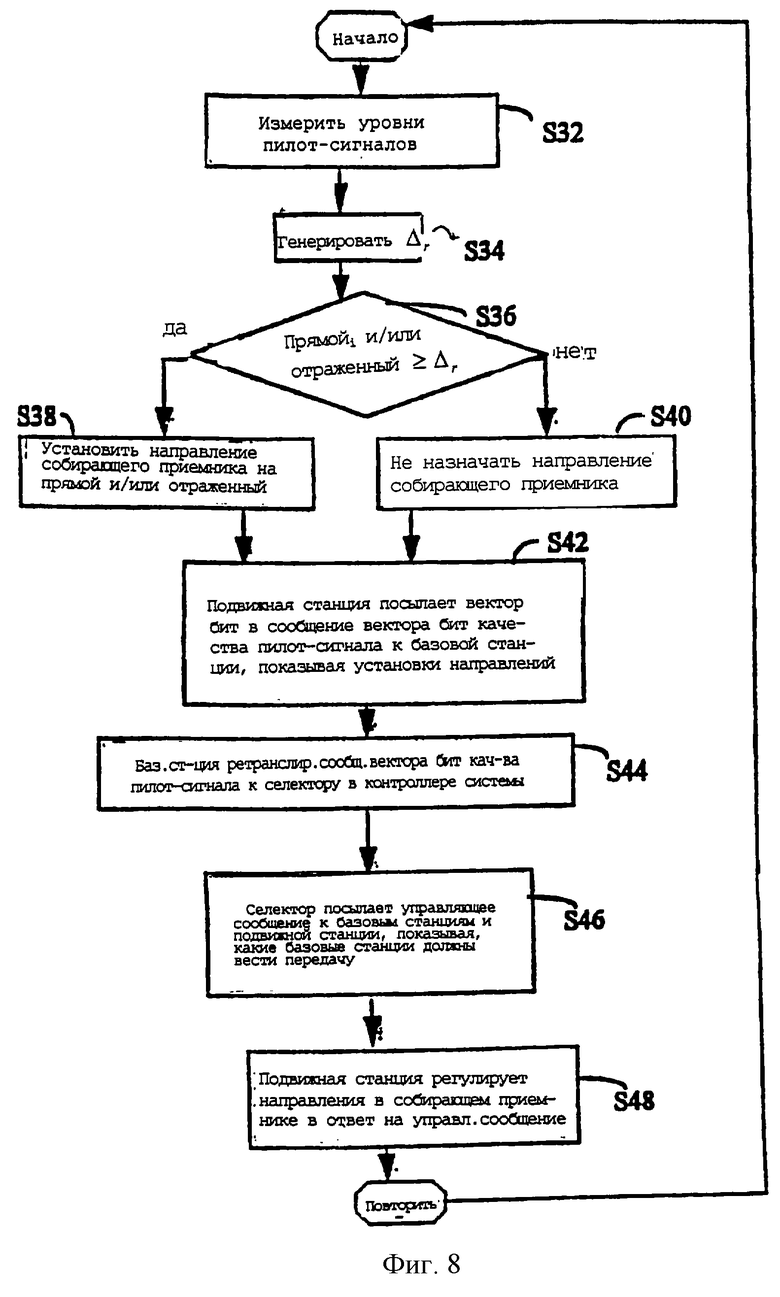
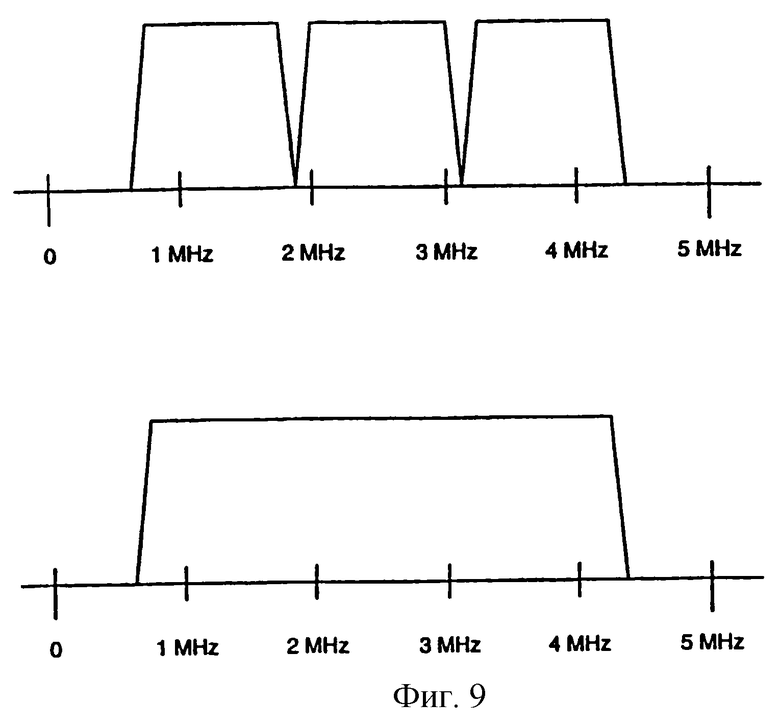
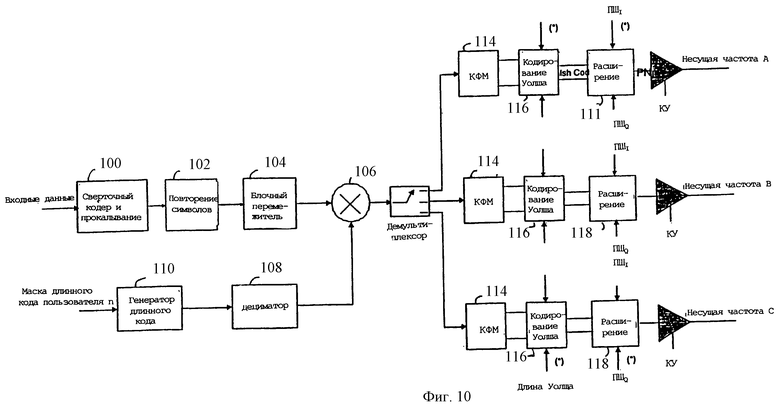
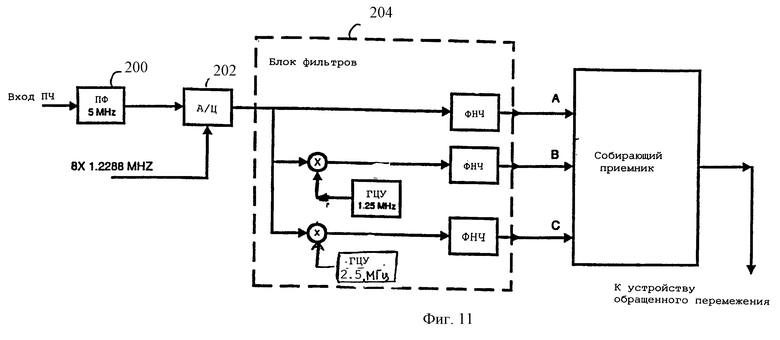
Система и способ для регулирования распределения мощности прямого канала трафика в системе связи, в которой качества сигналов каналов пилот-сигнала, соответствующим образом передаваемых множеством базовых станций, содержащихся в активном наборе подвижной станции, измеряются подвижной станцией, сравнивается со стандартом качества сигнала, и результаты сравнения сообщаются контроллеру системы, чтобы таким образом показать, какие из пилот-сигналов в подвижной станции превосходят стандарт. Контроллер системы затем регулирует распределение мощности прямого канала на основании результатов сравнения. Технический результат заключается в создании нового способа для уменьшения общей мощности прямого канала трафика, передаваемой к подвижной станции во время мягкой передачи обслуживания и системы для его осуществления 3 с. и 39 з.п. ф-лы, 14 ил.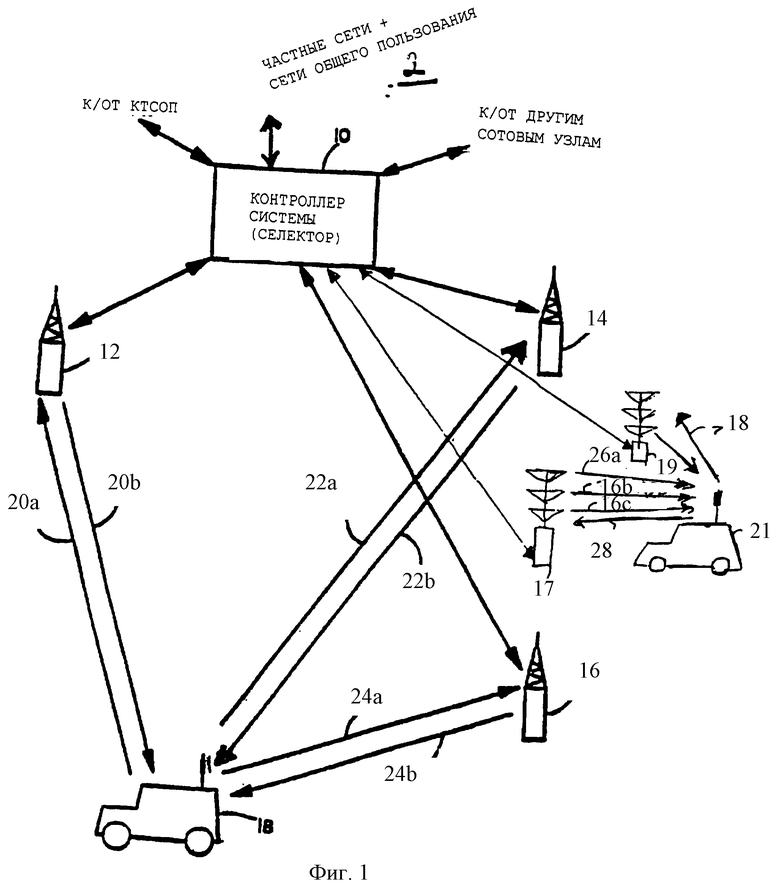
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 5640414 А, 17.06.1997 | |||
| RU 95101384 А1, 20.11.1996 | |||
| Пружинное стопорное кольцо | 1974 |
|
SU526726A1 |
| Устройство для отделения остатков мяса с обваленной кости | 1976 |
|
SU566551A1 |
