Изобретение относится к методам электрических измерений температуры и может быть использовано как средство неразрушающего контроля температуры металлических стенок сосудов, либо изделий из металла, как неподвижных, так и находящихся в движении. В частности, изобретение может быть использовано для контроля процессов масстеплопереносов газов или жидкостей в замкнутых сосудах по измерению температуры на характерных участках стенок этих сосудов.
Известны способы неразрушающего измерения температуры, к которым относятся пирометрические способы измерения [Л.1, стр. 273-280], основанные на регистрации электромагнитного излучения, возбуждаемого тепловым движением атомов и молекул, из которых состоят объекты измерений. Но длина электромагнитной волны теплового излучения порядка 1,0~5,0 мкм, поэтому основным недостатком аналога является зависимость показаний от фактического состояния поверхности объекта измерений. Достаточно наличия небольшого экрана в виде защитной пленки, увлажнения или загрязнения, как этот метод оказывается практически непригодным для измерения.
В качестве прототипа выбран способ терморезистивный [Л.1, стр. 260-265], основанный на зависимости удельного сопротивления материала от температуры. У металлов эта зависимость выражается формулой:
ρt = ρ0(1+α•Δt°), (1)
где ρt - удельное сопротивление металла при искомой температуре;
ρ0 - удельное сопротивление этого же металла при известной температуре t0 0 (опорная точка);
α - температурный коэффициент сопротивления материала (ТКС);
Δto=T=T0=to-t0 o
При этом для большинства металлов ТКС примерно одинаков и составляет α ≅ 4•10-3 1/Т (область от конца сверхпроводящего состояния до температуры плавления).
В прототипе в качестве датчика температуры использована катушка из медного проводника. При этом измеряют сопротивление этой катушки (Rкат·0) при известной температуре (t0 o), затем приводят катушку в контакт с объектом измерения. Далее, выдерживают некоторое время, достаточное для того, чтобы температура катушки практически сравнялась с температурой объекта, и измеряют сопротивление катушки  при этой температуре, которую и принимают за искомую. Температуру вычисляют по соотношению:
при этой температуре, которую и принимают за искомую. Температуру вычисляют по соотношению:
которое следует из (1), если заменить удельное сопротивление на интегральное.
Недостатком прототипа является недостаточная точность измерения и его инерционность из-за того, что измеряется температура датчика, а не самого объекта. Из-за того, что материал датчика (в рассматриваемом примере - медный провод) должен иметь электрическую изоляцию, неизбежно возникает тепловое сопротивление между датчиком и объектом, которое зависит от величины и качества поверхностей их соприкосновения и от температуропроводности электроизоляции. Применять такой способ измерения температуры возможно, если обеспечить постоянство теплового сопротивления, т.е. датчик с объектом должны представлять собой единую конструкцию и, кроме того, температура объекта не должна изменяться в процессе измерения.
Технический результат, который может быть получен при осуществлении предлагаемого способа, заключается в увеличении точности и производительности измерения температуры объекта. Указанный технический результат достигается за счет того, что в способе терморезистивного измерения температуры предварительно измеряют активное сопротивление многовитковой катушки, которую затем помещают рядом с объектом, подают в катушку переменный ток с частотой, обеспечивающей проникновение электромагнитной волны в металлическую стенку объекта на глубину, равную или меньшую толщины стенки объекта, измеряют активное сопротивление катушки при известной температуре объекта, а затем то же сопротивление при искомой температуре и вычисляют искомую температуру по формуле: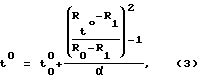
где α - температурный коэффициент сопротивления материала стенки объекта измерения;
t0 o - известная температура объекта;
R0 - активное сопротивление катушки при известной температуре; - активное сопротивление катушки при искомой температуре;
- активное сопротивление катушки при искомой температуре;
R1 - сопротивление катушки до помещения ее рядом с объектом измерения.
Совокупность указанных существенных признаков необходима и достаточна для достижения указанного технического результата: увеличение точности и производительности измерения производительности объекта. А именно, в предлагаемом способе датчик (катушка) с объектом измерения имеют непосредственную электромагнитную связь, благодаря чему активное сопротивление катушки изменяется (увеличивается). Это новое активное сопротивление катушки изменяется с изменением температуры объекта. При этом термический контакт (насколько это возможно) должен быть исключен.
Принцип действия предлагаемого способа поясняет фиг.1. На этом рисунке цифрами обозначено:
1. Катушка индуктивности (индуктор);
2. Объект исследования;
3. Источник питания переменным током частотой ω;
4. δ - зазор между катушкой и поверхностью исследуемого объекта.
С точки зрения электротехники, катушка индуктивности, находящаяся вблизи от проводящей поверхности объекта, может быть представлена эквивалентной схемой замещения как "воздушный" (т.е. не имеющий замкнутого магнитопровода) трансформатор (фиг. 1б), первичная обмотка которого характеризуется электрическими параметрами:
R1 - активное сопротивление катушки;
L1 - индуктивность.
Вторичной обмоткой этого трансформатора является виток индуцированного тока, который замкнут сам на себя. Этот виток характеризуется:
R2 - активным сопротивлением;
L2 - индуктивностью.
М - коэффициент взаимоиндукции индуктора и наведенного ("виртуального") витка с током.
Рассматривая эквивалентную схему замещения (фиг. 1б) как двухполюсник относительно входных зажимов а и б, получаем: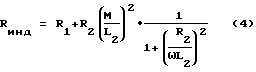
- активное сопротивление индуктора.
В теории индукционного нагрева, базирующейся на решении уравнений Максвелла, показано [Л. 2, стр. 13-31], что если по индуктору протекает переменный (синусоидальный) ток, то глубина проникновения электромагнитной волны в металл определяется формулой: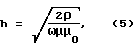
где μ0 и μ - соответственно абсолютная и относительная магнитная проницаемость.
Относительная магнитная проницаемость, за исключением ферромагнетиков, не зависит от величины индуцированного тока и с большой точностью равна 1. Там же показано, что в проводящих средах напряженность магнитного поля Н отстает по фазе от напряженности электрического поля Е на угол π/4, т.е. удельное комплексное сопротивление выражается соотношением:
z=(1+j)•ρ/h,
где  .
.
Переходя от удельных сопротивлений к интегральным, можно утверждать, что z2= R2+jωL2 и R2=ωL2, т.е. активное сопротивление рассматриваемого участка объекта равно его индуктивному сопротивлению. С учетом этого положения уравнение (4) упрощается:
Если индуктор представляет собой многовитковую катушку и ее ширина существенно больше зазора δ, то в уравнении (4') R1 оказывается существенно меньшим сопротивления виртуального витка "приведенного" к зажимам индуктора, т.е. 
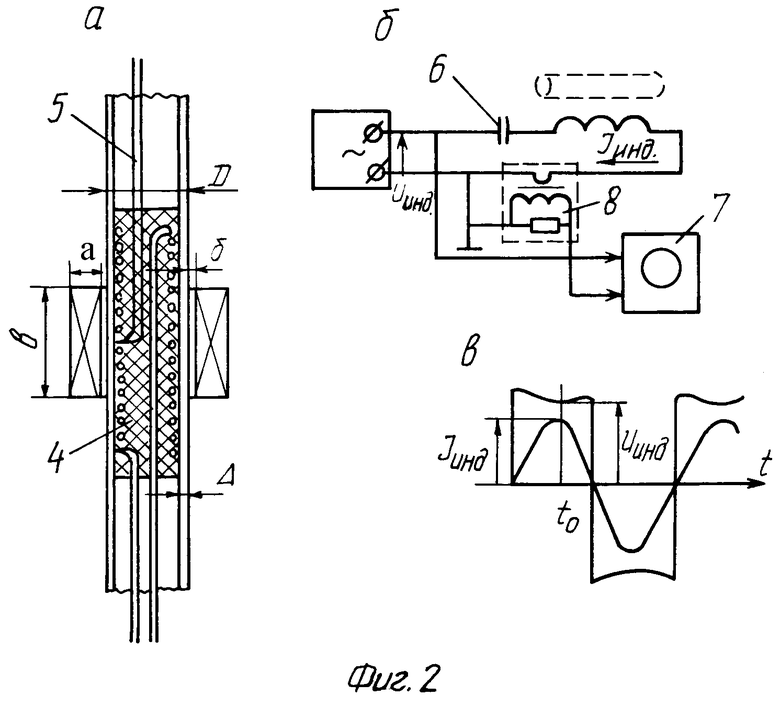
Например, для "нагруженного" индуктора, геометрические размеры которого показаны на фиг.2 и имеющего число витков w=60 при частоте тока f=80 кГц и удельном сопротивлении металла трубки ρ0=4,4•10-6 Ом•см, экспериментальное значение Rинд=5,63 Ом при R1=0,73 Ом. Заметим, что R2=4,86•10-3 Ом (расчетное значение). Коэффициент приведения активного сопротивления виртуального витка с током ко входу индуктора в данном случае составляет 4,90: 4,86-3= 1008. Из этого следует, что многовитковая катушка (индуктор) представляет собой своеобразный "микроскоп", позволяющий проанализировать (с точки зрения изменения сопротивления) область объекта, находящегося под индуктором. Это и является физической предпосылкой предлагаемого метода измерения температуры.
Если длина виртуального витка L, его ширина m, а глубина h, то
с учетом (1) и (5) температурная зависимость выразится соотношением
где  эквивалентное сопротивление виртуального витка при температуре t0 o (опорная точка).
эквивалентное сопротивление виртуального витка при температуре t0 o (опорная точка).
Подставляя значения  (6) в (4'), находим температурную зависимость активного сопротивления индуктора:
(6) в (4'), находим температурную зависимость активного сопротивления индуктора:
где  - приведенное к зажимам индуктора активное сопротивление виртуального витка при температуре в опорной точке.
- приведенное к зажимам индуктора активное сопротивление виртуального витка при температуре в опорной точке.
Для измерения активного сопротивления нагруженного индуктора целесообразно последовательно с ним включить конденсатор такой величины емкости Скомп, чтобы скомпенсировать индуктивность нагруженного индуктора, т.е. необходимо настроить эту систему в резонанс:
При этом условии активное сопротивление нагруженного индуктора при температуре в опорной точке
R0 = R1 + R'20, (9)
то же сопротивление при искомой температуре to
to = t0 o + Δto, (10)
Из решения уравнений (9), (10) и (11) и следует приведенная выше формула (3) для вычисления искомой температуры.
В качестве конкретного примера реализации предлагаемого способа, на фиг. 2а схематически представлена экспериментальная установка по измерению температуры трубки с наружным диаметром =14 мм и с толщиной стенки Δ=1,0 мм. Удельное сопротивление материала трубки при температуре 20oС ρ0 = 4,4•10-6 Ом•см. В качестве индуктора использовалась катушка шириной в=8,0 мм, имеющая 60 витков. Индуктивность этой катушки (измерено) составляет 65,4 мкГн. Из формулы (5) следует, что частота должна быть не менее 27,3•10-3 Гц, при t0 o= 350oС. В данном случае частота равна 80 кГц. Зазор между индуктором и трубкой составляет δ=1,0 мм. Температура стенки измерялась независимо термопарным датчиком температуры 5, горячий спай которого плотно прижат к стенке трубки изнутри.
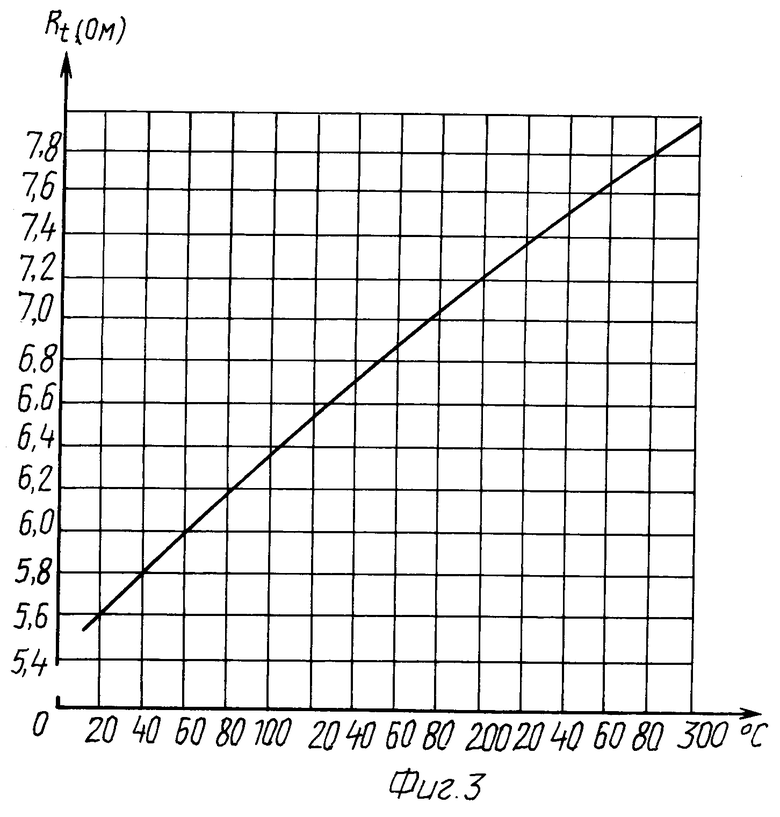
Электрическая схема экспериментальной установки представлена на фиг. 2б. Величина емкости конденсатора 6 определена по соотношению (8); в качестве регистрирующего устройства используется цифровой запоминающий осциллограф С8-9 (поз. 7), имеющий 2 канала записи. На первом канале записывалась информация о напряжении Uинд, на втором - ток через индуктор Iинд, снимаемый с помощью трансформатора тока 8. Сопротивление индуктора Rt определялось как отношение Uинд к Iинд в момент t0 амплитудного значения тока (фиг. 2в). На фиг. 3 представлена зависимость активного сопротивления индуктора от температуры в диапазоне от 20 до 300oС, которая может служить в качестве калибровочной кривой для определения температуры установки, показанной на фиг. 2. В представленном случае погрешность измерения температуры не хуже 2% на конце диапазона измерения.
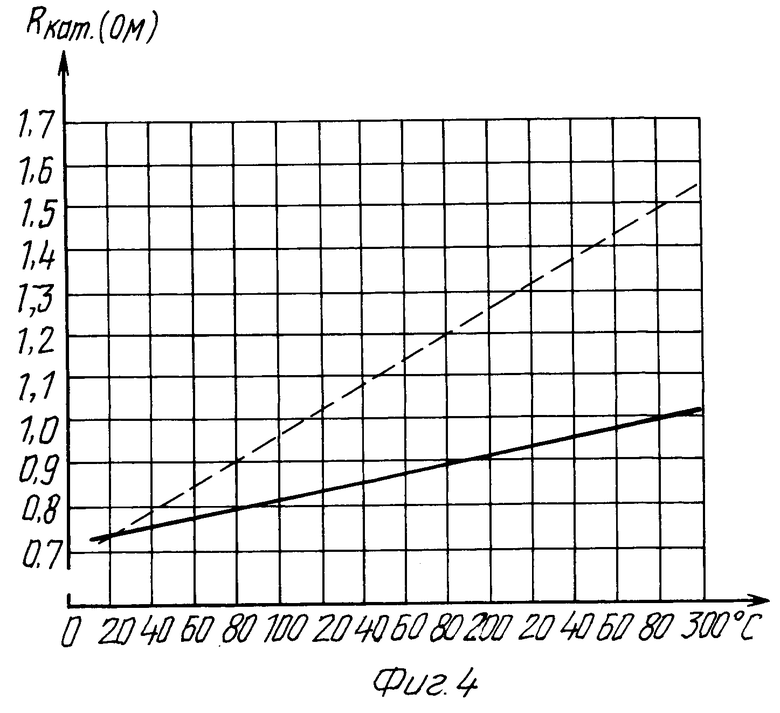
Следует обратить внимание, что информация о температуре объекта поступает за время, равное одному периоду колебания тока. В данном случае за 12,5 мкс, поэтому предложенный способ измерения может считаться практически безынерционным. Для сравнения на фиг. 4 представлена экспериментально снятая зависимость активного сопротивления той же катушки из медного провода от температуры, то есть воспроизведен известный терморезистивный метод измерения температуры. Сопротивление катушки измерялось прибором типа Е7-8. На той же фигуре пунктиром показана зависимость Rкат=f(t0), построенная в предположении, что датчик идеально воспринимает температуру объекта, т.е. тепловое сопротивление между трубкой и датчиком равно нулю. Как видно из графиков, погрешность измерения может достигать 250% на конце диапазона измерения.
На основании изложенного можно заключить, что реализация предлагаемого способа измерения температуры обеспечивает указанный технический результат, а именно: повышение точности и производительности измерения температуры объекта.
Сопоставительный анализ с аналогом и прототипом показал, что заявляемый способ не имеет идентичного по совокупности признаков, являющихся ключевыми по отношению к новому "Способу терморезистивного измерения температуры", и соответствует критерию изобретения о новизне. Сравнение заявляемого способа не только с прототипом, но и с другими известными способами измерения температуры позволяет заключить, что совокупность признаков достаточна для решения научно-технической задачи в рамках поставленной цели.
Литература:
1. С.А. Спектр. "Электрические измерения физических величин. Методы измерений". Л.: Энергоатомиздат, 1987.
2. В.С. Немков, В.Б. Демидович. "Теория и расчет устройств индукционного нагрева". Л.: Энергоатомиздат, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ДАВЛЕНИЯ ГАЗА В ТЕПЛОВЫДЕЛЯЮЩЕМ ЭЛЕМЕНТЕ ЯДЕРНОГО РЕАКТОРА | 2008 |
|
RU2399970C2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ТЕМПЕРАТУРЫ С КОНТРОЛЕМ МЕТРОЛОГИЧЕСКОЙ ИСПРАВНОСТИ | 2010 |
|
RU2444707C1 |
| ВИХРЕТОКОВЫЙ ТОЛЩИНОМЕР | 2009 |
|
RU2419763C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ С НЕТОЧЕЧНЫМ ИСТОЧНИКОМ | 2006 |
|
RU2313780C1 |
| СПОСОБ ОТБОРА ЭЛЕКТРОДОВ НЕЙТРОННОЙ ИОНИЗАЦИОННОЙ КАМЕРЫ ПО ПАРАМЕТРАМ ПОКРЫТИЯ ЭЛЕКТРОДОВ | 2003 |
|
RU2245517C2 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ УРОВНЕМЕРОВ И РАСХОДОМЕРОВ-УРОВНЕМЕРОВ | 2003 |
|
RU2249187C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ | 2003 |
|
RU2251684C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАДИАЦИОННОГО ИЗМЕРЕНИЯ ПЛОТНОСТИ ТВЕРДЫХ ТЕЛ | 2007 |
|
RU2345353C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА ВОДЫ-ТЕПЛОНОСИТЕЛЯ В ПЕРВОМ КОНТУРЕ КАНАЛЬНОГО ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2225046C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОЛЛИМАТОРА | 2000 |
|
RU2192059C2 |
Изобретение относится к методам электрических измерений температуры. Предложен способ измерения температуры объекта по изменению удельного сопротивления материала объекта без гальванического и теплового контакта датчика с объектом измерения. Технический результат заключается в увеличении точности и производительности измерения температуры объекта. 4 ил.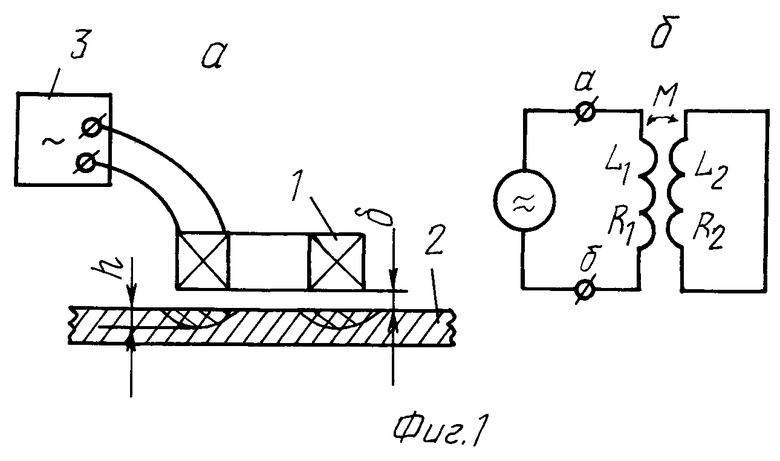
Способ терморезистивного измерения температуры объекта, заключающийся в том, что измеряют активное сопротивление многовитковой катушки, которую помещают рядом с объектом измерения, отличающийся тем, что подают в катушку переменный ток с частотой, обеспечивающей проникновение электромагнитной волны в металлическую стенку объекта на глубину, равную или меньшую толщины стенки объекта, измеряют активное сопротивление катушки при известной температуре объекта, а затем - то же сопротивление при искомой температуре и вычисляют искомую температуру по формуле
где α - температурный коэффициент сопротивления материала объекта измерения;
t0 0 - известная температура объекта;
R0 - активное сопротивление катушки при известной температуре; - активное сопротивление катушки при искомой температуре;
- активное сопротивление катушки при искомой температуре;
R1 - сопротивление катушки до помещения ее рядом с объектом измерения.
| СПЕКТР А.С | |||
| Электрические измерения физических величин, методы измерений | |||
| -Л.: Энергоатомиздат, 1987, с | |||
| Прибор для периодического прерывания электрической цепи в случае ее перегрузки | 1921 |
|
SU260A1 |
| Интегральная двухдиапазонная антенна | 1969 |
|
SU306784A1 |
| SU 1458720, 15.02.1989 | |||
| US 3812717 A1, 28.05.1974. | |||

