Область техники, к которой относится изобретение
Настоящее изобретение относится к системам радиосвязи, в частности к несогласованным частным системам радиосвязи.
Уровень техники
В течение нескольких прошедших десятилетий коммерческое применение сотовых систем для беспроводной и передвижной телефонной связи развивалось ускоренными темпами. Как правило, все развитые системы сотовой связи могут быть разделены на две части: фиксированную часть, состоящую из сети взаимосвязанных базовых радиостанций, и мобильную (передвижную) или портативную часть, включающую подвижные (мобильные) терминалы, например переносные радиотелефоны, которые имеют доступ к фиксированной сети. Каждая базовая станция передает управляющую информацию по служебному каналу, который может быть использован подвижными терминалами для доступа к сети. Каждая базовая радиостанция в сети охватывает ограниченную область, называемую ячейкой. Работа различных базовых станций в сети согласована с помощью контроллеров базовых станций (КВС). Используется повторное использование частоты (фиксированной или адаптивной), чтобы избежать помех при одновременной передаче от различных базовых станций. Примерами таких сотовых систем связи могут быть усовершенствованная система мобильной радиотелефонной связи (стандарт сотовой связи в США, ориентированный на города, AMPS), мультипрограммная система сбора данных (D-AMPS) и глобальная система мобильной связи (GSM).
В частных системах сотовой связи сетевая часть отличается от соответствующей общей сети сотовой связи. Частные системы вообще должны быть намного дешевле (поскольку стоимость системы разделена среди меньшего числа пользователей). Кроме того, частные системы обычно включают внутреннюю окружающую среду, которая менее предсказуема, чем внешняя окружающая среда (например, стены, закрывающиеся и открывающиеся двери, коридоры, которые действуют как волноводы). Следовательно, в целом базовые радиостанции во внутренних системах работают в более автономном режиме и сами определяют - какие каналы использовать для телефонного трафика и передачи информации управления (или сигналов радиомаяка).
В учрежденческих беспроводных телефонных системах, например, таких как "DEGT" (Европейский стандарт для беспроводной связи), еще может иметь место некоторая степень взаимодействия между базовыми станциями отдельной внутренней сети. В то же время базовые радиостанции учрежденческой системы, такой как "DECT", являются, насколько это возможно, автономными; они свободно синхронизированы по времени при работе в сети, чтобы обеспечить переход от одной базовой станции к другой. Сетевые функции выполняются контроллером базовых станций. Для целей переключения важно, чтобы сигналы радиомаяков от различных базовых станций поступали на подвижный терминал в ограниченном промежутке времени для сканирования незанятых фреймов и установления связи. В частных системах, связанных с местом жительства, типа беспроводного телефона базовая радиостанция беспроводной телефонной сети образует отдельную частную сеть, которая соединена только с АТС общего пользования (PSTN) и, как правило, не имеет прямой связи или синхронизации с другими частными базовыми станциями (в частности, с соседними станциями), связанными с местом жительства. Во внутренних системах радиосвязи базовые радиостанции сами находят нужные рабочие каналы. Эти каналы предпочтительно не должны наводить помехи на каналы других близлежащих базовых радиостанций. Следовательно, базовая радиостанция находит каналы с самым низким уровнем шума (так называемые "малошумящие каналы") прежде, чем она начнет передавать сообщения. Периодически могут выполняться измерения, чтобы убедиться, что базовая станция работает на каналах с минимальным количеством помех.
В обычных аналоговых радиотелефонных системах при создании каналов связи, как правило, используется система многостанционного доступа с частотным разделением каналов (МДЧР). Практический аспект такой структуры, известный специалистам в данной области, состоит в том, что сигналы радиотелефонов с модулируемой формой волны, как правило, передаются в заданных частотных диапазонах в определенном спектре несущих частот. Эти дискретные диапазоны частот служат в качестве каналов радиотелефонной сотовой связи, через которые сотовые радиотелефоны (подвижные терминалы) связываются с ячейкой, обслуживаемой базовой станцией или спутником. Например, в Соединенных Штатах для нужд сотовой связи федеральные власти выделили блок частотного спектра УВЧ диапазона, далее разделенный на пары узкополосных диапазонов, и эта система обозначена как EIA-553 или IS-19B. Пары каналов системы дуплексной связи служат для передачи и приема частот каждой пары со смещением по частоте на 45 МГц. В настоящее время в Соединенных Штатах для мобильной сотовой связи выделены 832 радиоканала шириной 30 кГц каждый.
Ограничение числа доступных диапазонов частот при возрастающем количестве абонентов требует решения нескольких сложных задач.
Большое число абонентов в системе радиотелефонной сотовой связи требует более эффективного использования ограниченного доступного частотного спектра для получения наибольшего количества полных каналов при обеспечении нужного качества связи. Эта задача усложняется тем, что абоненты не могут быть равномерно распределены среди ячеек системы. Еще большее количество каналов может потребоваться для конкретных ячеек, чтобы обрабатывать потенциально большую плотность абонентов в любое данное время. Например, ячейка в городском районе могла бы, очевидно, содержать сотни или тысячи абонентов в любой момент, что значительно превышает число диапазонов частот, имеющихся в данной ячейке.
По этой причине в обычных сотовых системах связи применяется повторное использование частот, чтобы увеличить потенциальную пропускную способность канала в каждой ячейке и увеличить спектральную емкость. Повторное использование частоты позволяет перераспределить частотные диапазоны в каждой ячейке, использующей одни и те же частоты, географически отделенные друг от друга, чтобы позволить радиотелефонам в различных ячейках одновременно использовать ту же самую частоту без создания помех друг другу. В этом случае система, имеющая только несколько сотен диапазонов частот, может обслуживать много тысяч абонентов.
Другим способом, который может еще больше увеличить пропускную способность и спектральную эффективность канала, является использование многостанционного доступа с временным разделением каналов (МДВР). Система МДВР может быть внедрена посредством разделения диапазонов частот, используемых в обычных системах с частотным уплотнением, на последовательные временные интервалы. Хотя связь в диапазонах частот обычно осуществляется в общей структуре МДВР, которая включает множество временных интервалов, сеансы связи в каждом диапазоне частот могут происходить в соответствии с индивидуальной уникальной структурой МДВР во временных интервалах, присущих только данному диапазону. Примерами систем, основанных на использовании МДВР, является двойной аналого-цифровой стандарт IS-54B, принятый в Соединенных Штатах, в котором каждый из первоначальных диапазонов частот EIA-533 разбит на 3 временных интервалах, и Европейский стандарт GSM, который делит каждый из диапазонов частот на 8 временных интервалов. В этих системах МДВР каждый пользователь связывается с базовой станцией, используя пакеты цифровых данных, переданных в течение выделенных пользователю временных интервалов.
Канал в системе МДВР обычно включает один или большее количество временных интервалов на одном или нескольких диапазонах частот. Как упоминалось выше, загруженные каналы используются для передачи голоса, данных или другой информации между пользователями, например между радиотелефоном и наземным телефоном.
Таким образом, каждый канал трафика формирует одно направление дуплексной связи, устанавливаемое системой от одного пользователя к другому. Каналы трафика обычно динамически назначаются системой по мере необходимости. Кроме того, используются системы типа европейской системы GSM, каналы трафика со "скачком частоты", то есть со свободным переключением диапазона, на котором работает конкретный канал. Переключение частот уменьшает вероятность помех между каналами при использовании разнесения сигналов и усреднении выходной мощности для повышения качества связи.
Выделенные служебные каналы управления, служащие для передачи в пределах ячейки, являются прямыми каналами управления, которые используются для передачи по радио управляющей информации в пределах ячейки радиотелефонной системы к радиотелефонам, которым требуется доступ к системе. Управляющая информация, передаваемая по прямому служебному каналу управления, может включать такие элементы, как код идентификации ячейки, соответствующий код идентификации сети, сигналы синхронизации системы и другие данные, необходимые для доступа радиотелефона к системе связи.
Прямые каналы управления, типа канала управления радиопередачей (ВССН) стандарта GSM, обычно занимают выделенную полосу частот в каждой ячейке. Радиотелефон, который ищет доступ к системе, как правило, "прослушивает" канал управления в дежурном режиме и не синхронизирован с базовой станцией или со спутником до тех пор, пока он не "захватит" базовую станцию или спутниковый канал управления. Чтобы устранить излишние помехи между каналами управления в соседних ячейках, обычно применяется повторное использование частоты с различными выделенными диапазонами частот, используемыми для канала управления в соседних ячейках, в соответствии с методикой повторного использования частот, которая гарантирует минимальное разделение между ячейками совместно действующих каналов. Перескок частоты, который мог бы позволять более эффективное повторное использование частот канала управления, обычно не применяется, поскольку не синхронизированному со станцией радиотелефону трудно захватить канал управления с изменяющейся частотой из-за, отсутствия опорной точки (начала отсчета) для используемой последовательности перескока частоты. Кроме того, для частных несогласованных систем радиосвязи модель повторного использования частоты не может быть применена, потому что каждая система работает независимо от других потенциально мешающих систем. Как правило, при управлении радиосвязью определяют нисходящую линию связи (от базовой станции к портативной) для прямых каналов управления и восходящую линию связи (от портативной станции к базовой). Базовая радиостанция прослушивает информацию, поступающую по восходящей линии связи от портативной станции через соответствующий приемник для приема "восходящих" сигналов. Для того чтобы прослушать информацию, поступающую по нисходящей линии связи, посланную другими базовыми станциями, обычно требуется также и приемник "нисходящих" сигналов. Восходящая и нисходящая линии связи могут работать на разных частотах, в режиме так называемой дуплексной связи с частотным разделением каналов (частотным уплотнением) (ЧРК) или с различными временными интервалами при так называемой дуплексной связи с временным разделением каналов (ВРК). В сотовых системах связи обычно используют упомянутую выше дуплексную связь с частотным уплотнением для каналов управления нисходящей линии связи. Для контроля других базовых станций последние снабжаются приемником нисходящих сигналов, что, естественно, повышает их стоимость. При схеме дуплексной связи с временным разделением каналов нисходящая связь может быть обеспечена только в другом временном интервале, так что нисходящий и восходящий приемы могут вестись с помощью одного и того же приемника. Например, в системе DECT используется схема дуплексной связи с временным разделением.
Имеется несколько причин, по которым в определенных областях радиосвязи использование ЧРК предпочтительнее использования ВРК. Если базовые станции не согласованы во времени, схема дуплексной связи с временным разделением, как правило, связана с взаимными помехами между восходящей и нисходящей линиями связи. Кроме того, поскольку базовые радиостанции сооружаются, как правило, на возвышенных местах, чтобы обеспечить прямую видимость с подвижными станциями, помехи от базовых станций к передвижным и другим базовым станциям могут доминировать. При ЧРК восходящая и нисходящая линии связи полностью разделены по частоте и, как правило, не мешают друг другу.
Кроме того, если рассматриваются те частные системы, которые основаны на сотовых стандартах с воздушным интерфейсом, подобно GSM или D-AMPS, дуплексная связь с частотным разделением каналов может потребоваться по причине совместимости. Следовательно, в частных системах радиосвязи, использующих ЧРК для различения восходящей и нисходящей линий связи, базовые станции обычно сами определяют, на каком канале нужно работать, не зная о передаче с другой соседней базовой радиостанции.
Эта проблема, в частности, относится к каналу управления или каналу радиомаяка базовых станций, который периодически передает сигналы для связи с подвижными объектами. Для каналов трафика система может использовать приемник нисходящих сигналов в подвижной станции, чтобы получить информацию о местных помехах. Измерения нисходящей линии связи, сделанные на подвижной станции, могут быть переданы на базовую станцию, которая тогда может выбрать оптимальный (дуплексный) канал трафика. Для канала радиомаяка этот способ, как правило, не применяется, поскольку при отсутствии трафика не гарантируется наличие передвижной станции.
В несогласованных частных системах радиосвязи доступ к связи между подвижными терминалами и базовыми станциями может быть не обеспечен, если имеется помеха от радиомаяка. Такая помеха может иметь место между передачами сигналов радиомаяка несогласованных частных систем радиосвязи, которые расположены в пределах действия помех и передаваемых сигналов радиомаяка при наложении этих помех по времени и по частоте. В частности, поскольку сигналы радиомаяка передаются через фиксированные промежутки времени, они могут создавать взаимные помехи в течение значительного периода времени, предотвращая доступ подвижного терминала к несогласованным системам.
Сущность изобретения
Таким образом, задачей настоящего изобретения является решение проблемы помех от канала радиомаяка в частных системах радиосвязи, которые не скоординированы друг с другом и не могут слышать друг друга, но работают в одном и том же частотном диапазоне. Для того чтобы решить проблему помех между сигналами радиомаяка и различных несогласованных и несинхронизированных частных базовых станций связи, настоящим изобретением предусматривается создание базовой станции, посылающей короткие пакеты сигналов радиомаяка, которые псевдослучайно размещены по времени. Могут иметь место столкновения между радиомаяками, но маловероятно, чтобы в течение более длинного интервала времени все радиомаяки подвергались взаимному воздействию, поскольку сигналы от различных базовых станций хаотически заменяются (флуктуируют) независимо друг от друга. В частности, множество последовательных столкновений, достаточных для потери синхронизации, маловероятно. Тем не менее, поскольку хаотическое изменение (флуктуация) сигналов для данной базовой станции осуществляется псевдослучайным образом, подвижный терминал может предвидеть, когда прибудет следующий сигнал радиомаяка от идентифицированной базовой станции, и, следовательно, снижается риск потери синхронизации с базовой станцией из-за флуктуации радиомаяка.
В одном варианте передачи сигналов радиомаяка по настоящему изобретению период времени между смежными пакетами сигналов радиомаяка той же самой базовой станции радиостанции флуктуирует псевдослучайными образом вокруг некой средней величины. В другом варианте изобретения количество фреймов между смежными пакетами сигналов радиомаяка той же самой базовой радиостанции является величиной постоянной, псевдослучайно изменяется только промежуток времени в пределах фрейма, в котором происходит передача сигнала радиомаяка.
Еще в одном варианте настоящего изобретения используется частная базовая радиотелефонная станция, включающая радиопередающее средство для передачи пакетов сигналов радиомаяка для установления радиосвязи с подвижным терминалом. Базовая станция включает средство управления передачей радиомаяка, которое обеспечивает периодическую передачу сигналов радиомаяка в хаотически изменяющихся временных интервалах, чтобы избежать повторного столкновения с сигналами радиомаяка, передаваемыми другими несогласованными частными базовыми станциями. Фликкер-генератор формирует текущее значение флуктуации сигнала для каждой передачи радиомаяка, величина которого ограничена максимальным значением флуктуации радиомаяка и которое сформировано с помощью заданной функции, имеющей результирующее среднее значение, равное нулю. Средство инициализации передачи включает радиомаяк в работу после определенного интервала времени, который является функцией текущего значения флуктуации радиомаяка.
В другом варианте настоящего изобретения предусмотрен подвижный терминал, который включает приемник для приема передач радиомаяка от несогласованных частных радиотелефонных базовых станций. Подвижный терминал имеет средство для приема сигналов радиомаяка и получения кода идентификации базовой станции из принятого сигнала радиомаяка. Подвижный терминал дополнительно включает средство для определения заданной функции формирования флуктуации на основании кода идентификации и средство для синхронизации подвижного терминала с временными интервалами флуктуирующей передачи радиомаяка на основании заданной функции флуктуации. Например, код идентификации базовой станции может быть параметром функции формирования флуктуации, позволяющей подвижному терминалу предвидеть последующие значения флуктуации.
Изобретение также предлагает различные способы флуктуирующей передачи сигналов радиомаяка. Сигналы радиомаяка передаются базовой станцией и включают присваиваемый ей код идентификации и информацию о ее состоянии. После этого базовая станция переходит в ждущий режим в течение определенного времени перед началом передачи последующих сигналов радиомаяка. Время определяется посредством вычисления текущего значения флуктуации радиомаяка и ожидания в течение времени, которое является функцией значения флуктуации и желательного среднего времени между передачами сигналов радиомаяка. Цикл инициализации передачи и ожидания затем повторяется для каждой последующей передачи радиомаяка. Подвижный терминал принимает переданный сигнал радиомаяка. Подвижный терминал получает информацию о состоянии станции из принятого сигнала радиомаяка и определяет доступность базовой станции для связи с подвижным терминалом. Подвижный терминал также получает код идентификации базовой станции и входит в синхронизацию с радиомаяком базовой станции на основании заданной функции, формирующей флуктуацию, связанной с идентифицированной базовой станцией.
Соответственно, передача флуктуирующих сигналов радиомаяка по настоящему изобретению направлена на решение проблемы столкновения радиомаяков между несогласованными частными системами радиосвязи путем флуктуации времени передачи сигналов радиомаяка для снижения потенциала повторных столкновений. Настоящее изобретение также обеспечивает модель псевдослучайной флуктуации радиомаяка, которая связана с кодом идентификации базовой станции, передаваемым на подвижный терминал радиомаяком. Подвижный терминал получает код идентификации и после этого может определять модель флуктуации радиомаяка для идентифицированной базовой станции для обеспечения синхронизации, даже если имеют место многократные последовательные столкновения радиомаяков.
Краткое описание чертежей
На фиг.1 схематично показаны три частные системы радиосвязи, которые не согласованы между собой и имеют перекрываемые диапазоны передачи сигналов;
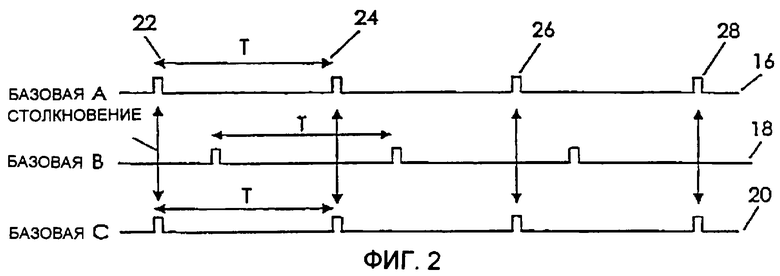
на фиг. 2 графически показано столкновение пакетов сигналов радиомаяков между несогласованными частными системами радиосвязи;
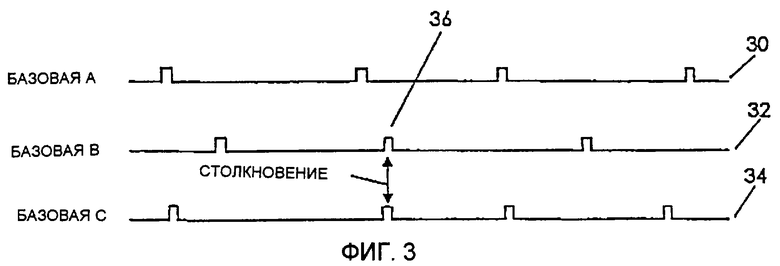
на фиг. 3 графически показана передача пакетов флуктуирующих сигналов радиомаяка для предотвращения повторного столкновения пакетов радиомаяка;
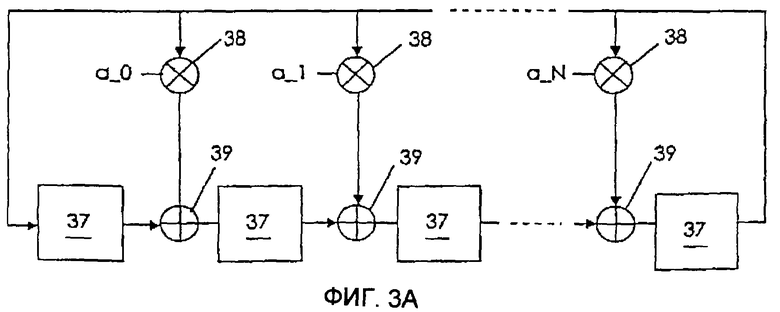
на фиг. 3а схематически показан модульный генератор регистра сдвига, который может быть использован для формирования функции флуктуации радиомаяка, согласно настоящему изобретению;
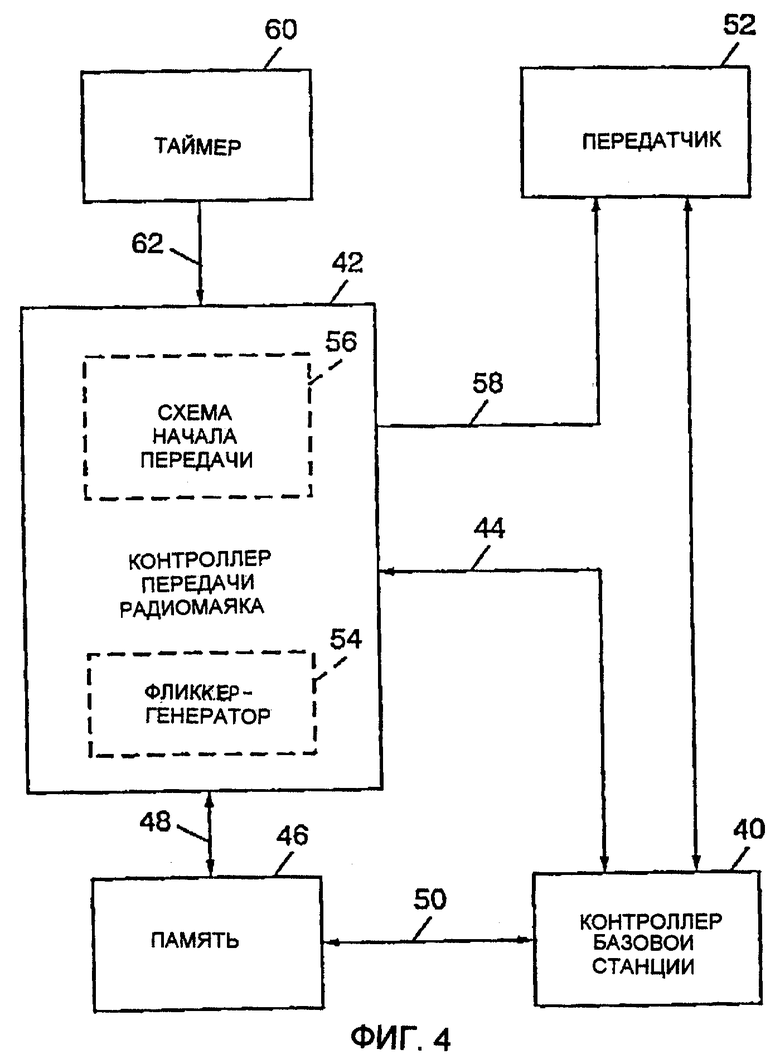
фиг. 4 - схематическая блок-схема базовой станции персональной радиосвязи, согласно настоящему изобретению;
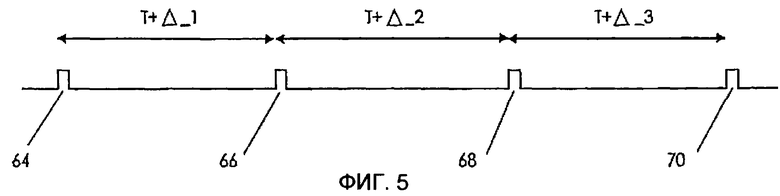
фиг. 5 - графическая иллюстрация одного варианта флуктуации радиомаяка, согласно настоящему изобретению;
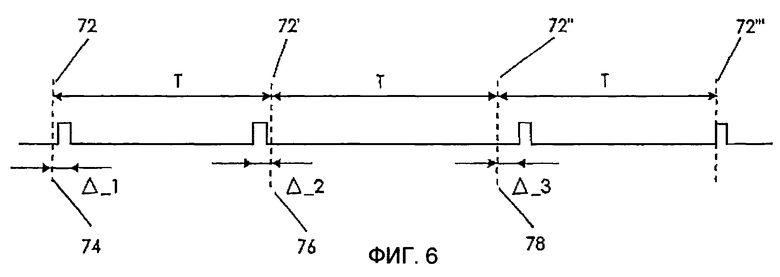
фиг. 6 - графическая иллюстрация другого варианта флуктуации радиомаяка, согласно настоящему изобретению;
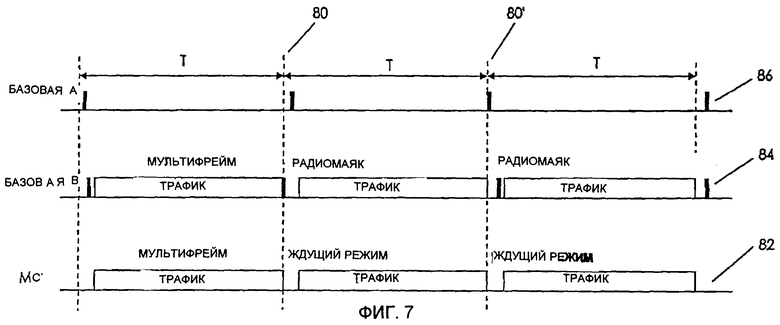
фиг.7 - графическая иллюстрация флуктуации радиомаяка, согласно настоящему изобретению, в многофреймовой системе радиосвязи многостанционного доступа с временным разделением каналов;
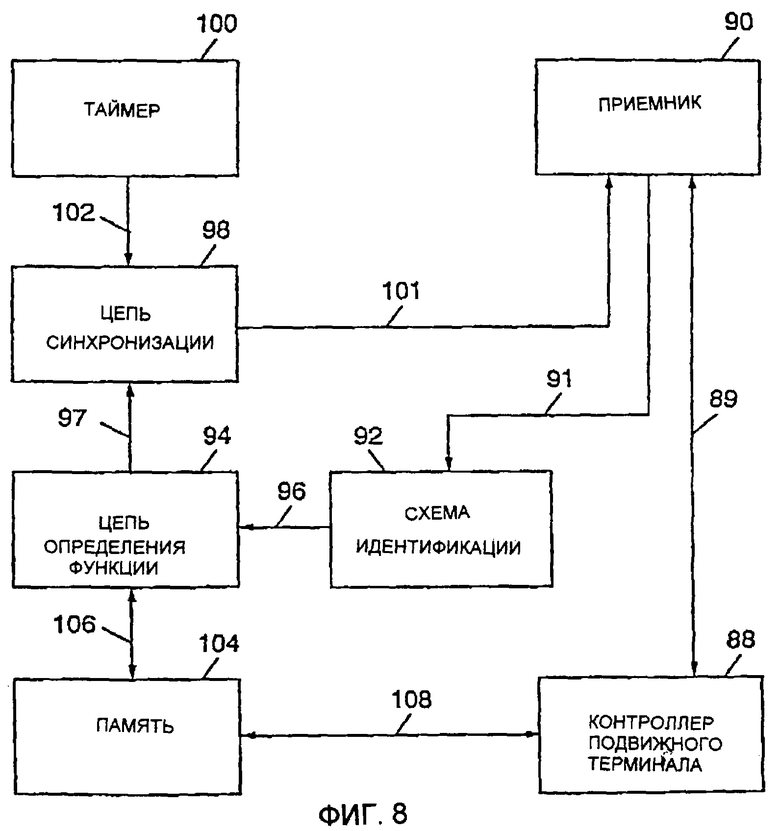
фиг.8 - схематическая блок-схема подвижного терминала, согласно настоящему изобретению;
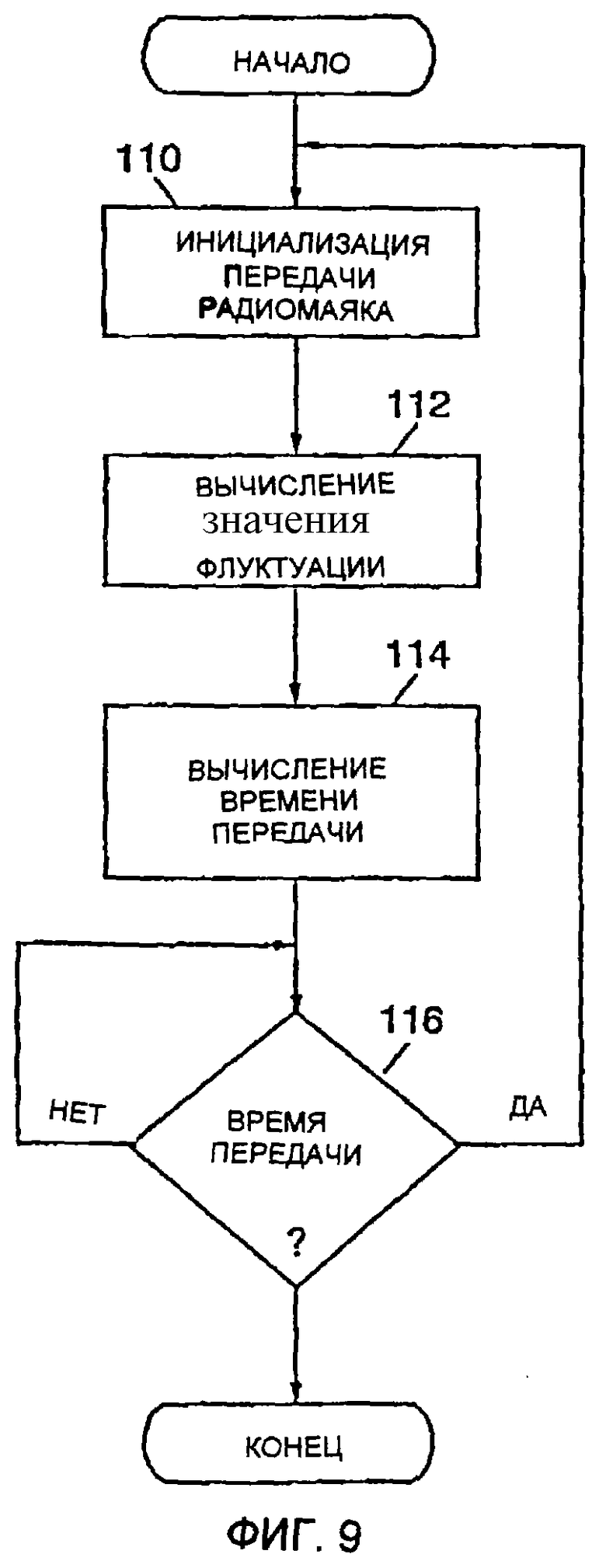
фиг. 9 - технологическая схема, иллюстрирующая работу частной базовой станции связи, согласно настоящему изобретению;
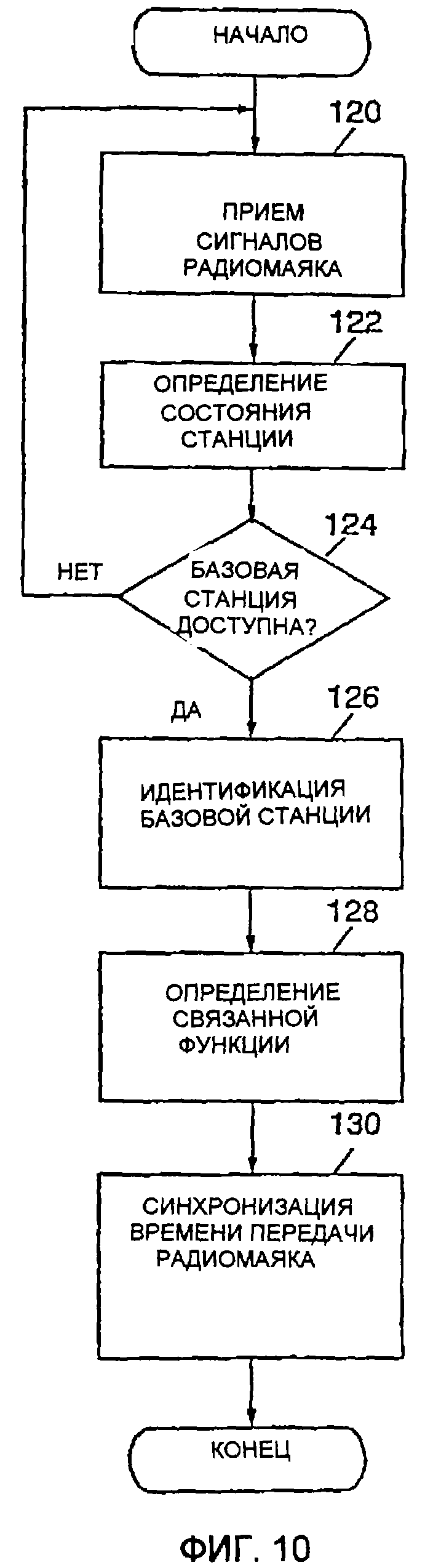
фиг. 10 - технологическая схема, иллюстрирующая работу подвижного терминала, согласно настоящему изобретению.
Подробное описание показанных на схемах вариантов осуществления изобретения
Настоящее изобретение описано ниже более подробно со ссылками на сопровождающие чертежи, на которых представлены предпочтительные варианты осуществления изобретения. Настоящее изобретение может, однако, быть воплощено в различных формах и не должно рассматриваться как ограниченное набором данных вариантов осуществления. Эти варианты описываются для полного раскрытия сущности изобретения, объем которого будет понятен специалистам в данной области.
Обратимся теперь к фиг.1, на которой схематично показаны рабочие условия эксплуатации настоящего изобретения. На фиг.1 показаны базовые станции 10А, 10В, 10С, которые не скоординированы (не согласованы) и не синхронизированы друг с другом, и они не могут прослушивать друг друга через воздушный интерфейс из-за несовместимости между каналами восходящей и нисходящей линий связи. Как показано на фиг.1, базовые станции 10А, 10В, 10С - это частные системы персональной радиосвязи, связанные с местом жительства и расположенные в жилых домах. Пример такой системы персональной радиосвязи описан в патенте US No 5.428.668, который приводится здесь в качестве ссылки для более полного уяснения сущности изобретения. Каждая из базовых станций 10А, 10В, 10С связана только с АТС общего пользования и обычно не имеет никакой прямой связи с другой базовой станцией. Дальность действия передачи (зона передачи) каждой базовой станции показана пунктирными окружностями 12А, 12В, 12С, и, как это видно на чертеже, они перекрывают друг друга. Следовательно, могут иметь место помехи между базовыми станциями 10А, 10В, 10С.
Каждая из базовых станций 10А, 10В, 10С периодически передает короткий пакет сигналов радиомаяка, который может содержать информацию о состоянии станции и присваиваемый базовой станции 10А, 10В, 10С код идентификации. Подвижный терминал 14, если он находится в пределах дальности 12А, 12В, 12С действия передачи базовой станции 10А, 10В, 10С, может принимать сигналы радиомаяка и определять их принадлежность к базовой станции 10А, 10В, 10С.
На фиг.2 графически представлена проблема связи радиомаяка базовой станции из-за помех, вызванных столкновением между радиомаяками несогласованных базовых станций 10А, 10В, 10С. На фиг.2 представлены сигналы радиомаяка для базовой станции А 10А, базовой станции В 10В и базовой станции С 10С, показанных позициями 16, 18 и 20 соответственно. Каждая базовая станция 10А, 10В, 10С периодически передает пакет сигналов радиомаяка. Следовательно, как показано на фиг.2, по времени каждый пакет радиомаяка состоит из бесконечного ряда пакетов сигналов радиомаяка, разделенных фиксированным периодом времени "Т". Поскольку пакеты радиомаяка не синхронизированы, они могут беспорядочно распределяться и сталкиваться между собой, как показано позицией 16 для передачи с базовой станции А и позицией 20 для передачи с базовой станции С в промежутки времени 22, 24, 26, 28. При фиксированном периоде Т, как только столкновение происходит во временном интервале 22, последующие радиомаяки 24, 26, 28, как правило, также будут сталкиваться. Дрейф в системе синхронизации базовой станции А 10А и базовой станции С 10С может отделить радиомаяки друг от друга и предотвратить их столкновение. Однако, когда дрейф во времени невелик, сигналы радиомаяков базовой станции А 10А и базовой станции С 10С могут сталкиваться в течение длительного времени.
Преднамеренная флуктуация сигналов радиомаяка по настоящему изобретению решает эту проблему, как графически показано на фиг.3. На фиг.3 графически представлены передачи пакетов радиомаяка для базовой станции А 10А, базовой станции В 10В и базовой станции С 10С, как показано позициями 30, 32, 34 соответственно. Как показано на фиг.3, период времени между последовательными пакетами сигналов радиомаяка для каждой базовой радиостанции 10А, 10В, 10С подвергается флуктуации в пределах заданного временного интервала среднего периода. Какое-то время средний период между радиомаяками все еще остается фиксированным периодом Т, как в системах на фиг.2.
Столкновения между радиомаяками все еще возможны, даже с флуктуирующими сигналами радиомаяков, как показано в момент времени 36, где столкновение происходит между радиомаяками базовой станции В 10В и базовой станции С 10С. Однако, как показано далее на фиг.3, благодаря флуктуации сигналов радиомаяков последующие переданные пакеты радиомаяков от базовой станции В 10В и базовой станции С 10С не сталкиваются.
Можно доказать математически, что вероятность столкновений М последовательных передач сигналов радиомаяка уменьшается по экспоненте с увеличением М. Соответственно, хотя передача радиомаяка с флуктуацией сигналов в соответствии с настоящим изобретением не может исключить вероятность хотя бы одного столкновения между сигналами радиомаяков несогласованных базовых радиостанций, вероятность последующих столкновений уменьшается по экспоненте. Поскольку вероятность потери синхронизации между подвижным терминалом 14 и базовой станцией 10А, 10В, 10С увеличивается при увеличении периода времени между приемом сигналов радиомаяков, настоящее изобретение предоставляет улучшенное средство поддержания синхронизации между подвижным терминалом 14 и несинхронизированными базовыми станциями 10А, 10В, 10С.
Предпочтительно при осуществлении настоящего изобретения при флуктуации передаваемых сигналов радиомаяка характер флуктуации определять псевдослучайным способом. Псевдослучайный способ, как он трактуется в данном описании, относится к определенному несогласованному формированию флуктуации на различных базовых станциях 10А, 10В, 10С, обеспечивая в то же время флуктуацию определенного характера для любой базовой станции 10А, 10В, 10С, которая может быть спрогнозирована по времени.
Например, в одном предпочтительном варианте характер флуктуации зависит от присваиваемого кода идентификации и может быть предсказан на основании этого кода идентификации базовой радиостанции. Эта псевдослучайная флуктуация остается случайной и по отношению к модели флуктуации между различными базовыми станциями 10А, 10В, 10С, так что базовые станции 10А, 10В, 10С имеют различный тип флуктуации, что помогает избежать повторных столкновений. Однако, имея предсказуемый характер флуктуации для любой конкретной базовой станции 10А, 10В, 10С, связанный с кодом идентификации базовой станции, подвижный терминал 14 сохраняет синхронизацию с флуктуирующими сигналами радиомаяка, передаваемыми от базовой станции 10А, 10В, 10С. Поскольку подвижный терминал 14 обеспечивается соответствующим кодом идентификации базовой станции в радиомаяке, можно определить характер флуктуации для этой базовой станции 10А, 10В, 10С.
Например, в одном варианте осуществления изобретения соответствующий код идентификации базовой станции 10А, 10В, 10С может определять тип псевдослучайной флуктуации. Как только подвижный терминал 14 определит фазу базовой станции 10А, 10В, 10С при этом типе флуктуации, подвижный терминал 14 может предсказать в будущем местоположение всех радиомаяков из кода идентификации базовой станции 10А, 10В, 10С. Эта фаза может быть пропущена базовой станцией 10А, 10В, 10С в сигнале радиомаяка, или при первой регистрации, когда подвижный терминал 14 вступает в контакт с базовой станцией. После этого подвижный терминал 14 может остаться заблокированным с идентифицированной базовой станцией 10А, 10В, 10С без потери синхронизации радиомаяка, даже если несколько последовательных пакетов сигналов радиомаяка было потеряно из-за столкновения сигналов от различных соседних несогласованных базовых станций 10А, 10В, 10С.
Далее описан конкретный пример псевдослучайной методики на основе соответствующего кода идентификации, подходящего для использования с настоящим изобретением. Функцию флуктуации сигнала по настоящему изобретению можно сравнить с функцией кодирования в обычных сотовых сетях связи общего пользования, работающих по протоколу GSM. Кодированное слово формируется функциональным устройством, чьи входы связаны с индивидуальным ключом доступа и номером "счетчика", который добавляется в каждый момент кодирования. Как правило, номер счетчика является номером фрейма канала с временным разделением. Номер счетчика увеличивается по модулю N, где N - период повторения алгоритма кодирования. Номер счетчика фактически определяет фазу алгоритма (который постоянно накапливается). Конкретный алгоритм определяется индивидуальным ключом доступа.
Для радиомаяка с флуктуирующими сигналами, согласно настоящему изобретению, можно использовать аналогичный подход. Вход во флуктуационный (кодирующий) алгоритм может быть идентифицирован базовой станцией, а номер счетчика может быть номером фрейма, когда каждый сигнал радиомаяка передается во фрейме. Может быть также добавлен индивидуальный ключ доступа. Флуктуационный алгоритм выдает слово из n двоичных единиц, которое, будучи меньше младшего двоичного разряда, может быть использовано для получения двух различных величин флуктуации. Номер фрейма увеличивается для каждого нового интервала флуктуации. Идентификация базовой станции определяет, как номер фрейма преобразуется в значение флуктуации на выходе. В дополнение к идентификации базовой станции может быть добавлен индивидуальный ключ доступа, который вместе с идентификацией базовой станции определяет преобразование данных из номера фрейма до значения флуктуации. Индивидуальный ключ доступа можно, например, выдать подвижному терминалу 14 при инициализации. Это означает, что только подвижный терминал 14 имеет индивидуальный ключ доступа, соответствующий полученному коду идентификации базовой станции, что обеспечивает синхронизацию этого терминала с базовой станцией.
Для синхронизации с базовой станцией подвижный терминал 14 должен знать код идентификации базовой станции и номер фрейма (и, возможно, индивидуальный ключ доступа). Код идентификации базовой станции может быть послан непосредственно в радиомаяке. Номер фрейма может также быть тем же номером в радиомаяке (подобно номеру фрейма в канале управления обычных сотовых сетей связи) или он может быть присвоен подвижному терминалу 14 при его первой регистрации на передачу на базовой станции. Индивидуальный ключ доступа может быть получен из таблицы поиска, которая вводит данные идентификации базовой станции в индивидуальный ключ доступа (таблица поиска может быть сформирована при инициализации). Алгоритм кодирования, который может использоваться в настоящем изобретении, предпочтительно должен обеспечить значение флуктуации, равномерно распределенное по всему диапазону. Один из способов заключается в использовании генераторов псевдослучайной двоичной последовательности (ПСДП) с линейными регистрами обратной связи (ЛРОС) или модульных генераторов регистра сдвига (МГРС). Пример схемы модульного регистра сдвига представлен на фиг.3а.
Оборудование, показанное в примере на фиг.3а, состоит из ряда регистров сдвига 37, которые имеют обратную связь в соответствии с конкретной функцией. Умножители 38 умножают сигнал обратной связи на коэффициент а_i (от i-0 до N) и передают результаты в сумматоры по модулю 2 (EXOR) 39. Коэффициенты от а_ 0 до N определяют функцию обратной связи, которая фактически является функцией флуктуации. а_ i может быть 0 или 1, где 1 означает установление цепи обратной связи, а 0 означает отсутствие соединения. Идентификация базовой станции (возможно вместе с индивидуальным ключом) определяет значение а_ i. Чтобы определить новое значение флуктуации, текущий номер фрейма загружается в регистры сдвига. После этого информация хронометрируется один раз (или установленное число раз), после чего значение флуктуации выводится из одного или нескольких выходов регистров сдвига. Для получения следующего значения флуктуации увеличивается номер фрейма, загружается в регистр сдвига, и схема снова хронометрируется.
Преобразование данных из кода идентификации базовой станции вместе с индивидуальным ключом может быть выполнено различными способами. Например, можно использовать таблицу поиска, на которой отображена идентификация базовой станции для определенной комбинации a_i. Возможны различные способы осуществления функции флуктуации для реализации выгодных особенностей настоящего изобретения, что очевидно для специалистов в данной области.
Обратимся теперь к фиг.4 с вариантом осуществления изобретения базовой станции 10А, 10В, 10C, согласно настоящему изобретению, который описывается ниже. Базовая станция 10А, 10В, 10C включает контроллер базовых станций 40 или другое средство для управления работой базовой станции 10А, 10В, 10C, включая установление радиосвязи между базовой станцией 10А, 10В, 10C и подвижным терминалом 14. При осуществлении контроллером базовых станций 40 различных функций для решения задач по настоящему изобретению соответствующие функции контроллера базовых станций 40 включают в себя обеспечение идентификации базовой станции и выдачу данных о состоянии станции контроллеру передачи радиомаяка 42, либо непосредственно через электрическое соединение 44, либо через совместно используемую память 46. Контроллер базовой станции 40 и контроллер передачи радиомаяка 42 соединены с памятью 46 через шину 48, 50. Контроллер базовой станции 40 координирует передачу через контроллер передачи радиомаяка 42 с другой радиопередачей, инициированной контроллером базовой станции 40 через передатчик 52.
Память 46 или другое устройство для хранения данных связаны с контроллером передачи радиомаяка 42 и контроллером базовой станции 40 и хранят заданную функцию флуктуации для каждой базовой станции 10А, 10В, 10C. Например, заданная функция флуктуации может быть функцией, имеющей множество назначенных коэффициентов, основанных на присваиваемом коде идентификации базовой станции 10А, 10В, 10С. В этом случае коэффициенты функции хранятся в памяти 46. Информация о состоянии базовой станции и соответствующий код идентификации могут также храниться в памяти 46.
Передатчик 52 или другое радиопередающее средство для осуществления радиосвязи соединены с контроллером передачи радиомаяка 42 и с контроллером базовой станции 40. Хотя радиопередающее средство 52 может быть только передатчиком для посылки сигналов радиомаяка, оно также может быть приемопередатчиком, обеспечивающим функции передачи и приема для осуществления связи по восходящей и нисходящей линиям связи между базовой станцией 10А, 10В, 10C и подвижным терминалом 14.
Контроллер передачи радиомаяка 42 или иное средство управления периодической передачей сигналов радиомаяка базовой станции 10А, 10В, 10C в изменяемых временных интервалах связано с передатчиком 52. Контроллер передачи радиомаяка 42 включает фликкер-генератор 54 или другое средство для формирования текущей флуктуации радиомаяка, имеющей величину, не превышающую заданное максимальное значение флуктуации радиомаяка на основе заданной функции, хранящейся в памяти 46, и имеющей результирующее среднее значение, по существу равное нулю. Результирующее среднее значение флуктуации порядка нуля обеспечивает поддержание среднего периода Т между передачами радиомаяка, равного фиксированному периоду Т. Обеспечение значения флуктуации с заданной максимальной величиной позволяет учитывать синхронизацию фрейма, что важно при реализации настоящего изобретения в условиях радиосвязи с многостанционным доступом с временным разделением каналов, как будет обсуждено ниже.
Контроллер передачи радиомаяка 42 дополнительно включает схему инициализации передачи 56 или другое средство инициализации передачи радиомаяка, которое обеспечивает начало передачи радиомаяка в течение времени, которое является функцией текущего значения флуктуации радиомаяка, формируемой фликкер-генератором 54. Схема инициализации передачи 56, реагирующая на воздействие фликкер-генератора 54, оперативно электрически соединена с передатчиком 52 через цепь 58, Контроллер передачи радиомаяка 42 подготавливает радиомаяк, включая соответствующий код идентификации базовой станции 10А, 10В, 10C и информацию о состоянии, полученную от контроллера базовых станций 40 и переданную передатчиком 52, реагирующим на команды схемы инициализации передачи 56, по которым запускается передача пакета радиомаяка в псевдослучайном хаотически изменяющемся временном интервале.
На фиг.4 также показан таймер 60 или другое средство выбора времени для обеспечения опорных синхроимпульсов для контроллера передачи радиомаяка 42 для отметки времени передачи радиомаяков. Таймер 60 электрически соединен с контроллером передачи радиомаяка 42 через цепь 62.
Хотя контроллер передачи радиомаяка 42 может использовать различные функции для передачи повторяющихся сигналов радиомаяка в изменяющихся временных интервалах, ниже описаны конкретные варианты осуществления изобретения со ссылкой на фиг.5 и 6 соответственно. На фиг.5 показан вариант начала передачи, как вариант изобретения, основанный на желательном среднем временном интервале Т радиомаяков и значением флуктуации, обеспечиваемым фликкер-генератором 54. В частности, установленное время между передачей последовательных сигналов радиомаяков сравнивается с временем передачи самых последних сигналов, переданных радиомаяком.
Как показано на фиг. 5, передача первого радиомаяка 64 сопровождается передачей второго радиомаяка 66, который запускается в течение T+Δ1, где Т - желательное среднее время между передачами радиомаяка, a Δ1 является текущим значением флуктуации от фликкер-генератора 54. Третий радиомаяк 68 ведет передачу в течение T+Δ2 после запуска второго радиомаяка 66. Аналогично, четвертый радиомаяк 70 осуществляет передачу в течение T+Δ3 после запуска третьего радиомаяка 68. Δ2 и Δ3 представляют собой соответственно текущие значения флуктуации радиомаяка для каждого из последующих рабочих циклов фликкер-генератора 54. Определяя функцию фликкер-генератора как псевдослучайную функцию, которая определяется на основе соответствующего кода идентификации соответствующей идентифицированной базовой станции 10А, 10В, 10С, когда подвижный терминал 14 принял сигналы любого радиомаяка 64, 66, 68, 70, подвижный терминал 14 может подсказать все последующие Δ1 и войти в синхронизацию с передачами радиомаяка от идентифицированной базовой станции 10А, 10В, 10С.
Иными словами, в варианте изобретения фиг.5 использование флуктуации основано на передаче предыдущих пакетов радиомаяка. Например, если первый пакет радиомаяка передан в течение времени T1, то второй пакет будет передан в течение времени T2 = T1+T+Δ2. Аналогично, третий пакет основан на размещении второго пакета и будет получен в течение времени T3 = T1+T+Δ2+T+Δ3 = T1+2T+Δ2+Δ3, где Δ2 является флуктуацией сигнала для момента второго радиомаяка, и Δ3 является флуктуацией для момента третьего радиомаяка. Как описано выше, среднее значение флуктуации Δ1 равно нулю.
На фиг.6 представлен альтернативный вариант изобретения для определения установленного времени, в течение которого схема инициализации передачи 56 начинает передачу сигналов радиомаяка. В варианте изобретения фиг.6 флуктуация времени передачи сигнала радиомаяка основана скорее на постоянной отметке времени, чем на сдвиге, основанном на времени передачи предыдущего пакета сигналов радиомаяка. Как показано на фиг.6, передача радиомаяка имеет разброс относительно заданной опорной отметки времени 72, 72', 72'' 72'''. В варианте изобретения, представленном на фиг.6, для каждого пакета сигналов радиомаяка инициирование передачи радиомаяка основано на опорных отметках времени 72, 72', 72'' 72'''. Фактическая передача начинается схемой инициализации передачи 56 путем смещения фиксированной отметки времени 72, 72', 72'' 72''' на значение флуктуации данного радиомаяка, задаваемого фликкер-генератором 54. Предположим, например, что посылка первого пакета радиомаяка начата во время T1 = 0+Δ1, как показано на фиг.6 позицией 74. Нулевая отметка времени относится только к опорной отметке времени 72 и упомянута исключительно для разъяснения. Как показано в позиции 76, передача второго пакета радиомаяка начата в момент T2 = T+Δ2. Следовательно, как показано позицией 78, третий пакет радиомаяка прибудет в течение времени T3 = 2T+Δ3.
В варианте изобретения, представленном на фиг.5, установленное время между началом передачи пакетов сигналов радиомаяка равняется среднему периоду Т между передачами радиомаяка базовой станции плюс расчетное значение флуктуации текущего радиомаяка от фликкер-генератора 54. В противоположность этому, в варианте изобретения на фиг.6 со сдвигом относительно заданной отметки 72, 72', 72'' 72''' установленное время между началом передачи пакетов радиомаяка равняется среднему периоду между передачами радиомаяка базовой станции плюс расчетное значение флуктуации текущего радиомаяка минус расчетное значение флуктуации радиомаяка для последнего ранее переданного пакета радиомаяка. Соответственно, в варианте изобретений, показанном на фиг.6, флуктуация передаваемых сигналов радиомаяка относительно заданной отметки 72, 72', 72'' 72''' может быть выполнена путем синхронизации начала передач относительно предыдущей передачи радиомаяка, поддерживая текущее значение флуктуации радиомаяка и последнее значение флуктуации радиомаяка для последнего переданного пакета радиомаяка. Можно доказать математически, что при контроле базовой станции 10А, 10В, 10С в течение относительно короткого периода времени отклонения от среднего значения времени Т в варианте изобретения по фиг. 5 могут быть гораздо большими, чем эти отклонения в варианте изобретения по фиг.6 при данном максимальном значении флуктуации радиомаяка.
Для частной радиотелефонной базовой станции 10А, 10В, 10С, расположенной в жилом доме, можно использовать вариант изобретения, представленный на фиг. 5 или фиг.6. Вариант изобретения на фиг.5 по своей природе более случаен, и, следовательно, вероятность последовательных столкновений будет меньше, чем в варианте изобретения на фиг. 6. С другой стороны, в варианте изобретения, представленном на фиг. 6, вероятность потери синхронизации радиомаяка с подвижным терминалом 14 меньше, когда имеет место большое количество последовательных столкновений радиомаяков. Для частных радиотелефонных базовых станций 10А, 10В, 10С со многими пользователями, где несколько базовых станций формируют общую частную местную сеть, вариант изобретения на фиг.6 может оказаться наиболее предпочтительным. Это особенно справедливо для частной сети, использующей стандарт, который позволяет только подвижному терминалу 14 прослушивать пакеты сигналов радиомаяка в незанятых фреймах.
Например, в частной сети радиосвязи, использующей воздушный интерфейс, совместимый с GSM, подвижный терминал 14 может искать только передачи радиомаяка базовой станции в незанятых фреймах 80, 80' (фиг.7), которые передаются через каждые 26 фреймов в системе МДВР. Сигналы пакета радиомаяка должны поступить в незанятый фрейм 80, 80', контролируемый подвижным терминалом 14. Как показано на фиг.7, подвижный терминал 14 (график 82) обрабатывает вызов при радиосвязи с базовой станцией 10В (график 84). В незанятых фреймах 80, 80' базовые станции 10А, 10В могут передавать сигналы радиомаяка, и подвижный терминал 14 может прослушивать эту передачу радиомаяка. Период передачи радиомаяка Т, как показано на фиг.7, является кратным мультифрейму из 26 фреймов; флуктуация должна быть обеспечена в течение фрейма или 8 временных интервалов. Флуктуация предотвращает столкновение сигналов, передаваемых между базовыми станциями 10А и 10B (сравните графики 84 и 86).
Как легко понять специалистам в данной области, вышеописанные преимущества настоящего изобретения, поясненные графиками на фиг.4, могут быть обеспечены при использовании соответствующего оборудования, программного обеспечения или их сочетанием. Хотя различные компоненты базовой станции 10А, 10В, 10С были показаны на фиг.4 как дискретные элементы, на практике они могут быть выполнены в виде микроконтроллера, включающего порты входа и выхода, работающего со стандартными компьютерными программами, в виде обычных или гибридных микросхем, в виде дискретных элементов или их комбинации из этих элементов. Например, контроллер передачи радиомаяка 42, память 46 и контроллер базовой станции 40 могут быть осуществлены как отдельное программируемое устройство.
На фиг.8 показан подвижный терминал 14, согласно настоящему изобретению, который описывается ниже. Подвижный терминал 14 включает контроллер подвижного терминала 88 или другое средство для управления действиями подвижного терминала 14, включая управление радиосвязью между подвижным терминалом 14 и базовой станцией 10А, 10В, 10С. Подвижный терминал 14 также включает приемник 90 или другое подвижное радиоприемное средство для приема радиосигналов, включая сигналы радиомаяка от базовой станции 10А, 10В, 10С, электрически соединенное с контроллером подвижного терминала линией 89. Приемник 90 может быть обычным приемником для приема радиомаяка, однако он также может быть приемопередатчиком, выполняющим функции приемопередачи для поддержания связи в восходящей и нисходящей линиях связи между подвижным терминалом 14 и базовыми станциями 10А, 10В, 10С.
Подвижный терминал 14 включает схему опознавания 92 ID или другое средство чтения сигналов радиомаяка и расшифровки кода идентификации базовой станции, полученного из радиомаяков. Схема опознавания 92 оперативно электрически соединена линией 91 с приемником 90. Подвижный терминал 14 также включает схему определения функции 94 или другое средство для определения заданной функции, используемой идентифицированной базовой станцией 10А, 10В, 10С для флуктуации сигналов радиомаяка на основе кода идентификации базовой станции, полученного схемой опознавания 92. Схема определения функции 94 оперативно электрически связана со схемой опознавания 92, как показано линией 96. Схема определения функции 94 также оперативно электрически соединена с линией 97, чтобы обеспечить синхронизацию схемы 98 или другого средства для синхронизации подвижного терминала 14 и приема передачи радиомаяка с временным интервалом для флуктуирующих сигналов радиомаяка от идентифицированной базовой станции 10А, 10В, 10С, причем эта операция основана на заданной функции флуктуации. Схема синхронизации 98 также оперативно соединена с приемником 90, как показано линией 101, и может быть дополнительно оперативно соединена с контроллером подвижного терминала 88.
На фиг. 8 также показан таймер 100 или другое средство для обеспечения отметки времени для подвижного терминала 14 при приеме или передаче сигналов радиомаяков. Таймер 100 оперативно электрически соединен со схемой синхронизации 98 через электрическую цепь 102.
Память 104 оперативно соединена со схемой опознавания 92 и контроллером подвижного терминала 88 через цепи 106 и 108 соответственно. В память 104 может быть введена справочная таблица с перекрестным поиском информации между кодом идентификации передающей базовой станции и заданной функцией флуктуации.
Как легко понять специалистам в данной области, вышеупомянутый описанный вариант настоящего изобретения, представленный на фиг.8, может быть обеспечен оборудованием, программным обеспечением или их комбинацией. Хотя различные компоненты подвижного терминала 14 были показаны на фиг.8 как дискретные элементы, они на практике могут представлять собой микроконтроллер, включающий порты входа и выхода и работающий по определенной программе, обычные или гибридные микросхемы, дискретные узлы или комбинации вышеупомянутых элементов. Например, контроллер подвижного терминала 88, память 104, схема опознавания 92, схема определения функции 94 и схема синхронизации 98 могут быть выполнены как отдельное программируемое устройство.
Фиг. 9 иллюстрирует способ синхронизации канала радиомаяка частной базовой радиотелефонной станции 10А, 10В, 10С, включая стадию повторной передачи сигналов радиомаяка в разнесенных временных интервалах. Операция синхронизации радиомаяка начинается в блоке 110, когда базовая станция 10А, 10В, 10С инициирует передачу радиомаяка. Переданный сигнал радиомаяка включает соответствующий код идентификации передающей базовой станции 10А, 10В, 10С и может дополнительно содержать информацию о состоянии базовой станции. В блоке 112 базовая станция 10А, 10В, 10С вычисляет текущее значение флуктуации радиомаяка. Значение флуктуации ограничено максимальной величиной этой флуктуации, как описано выше, и формируется заданной функцией, которая связана с кодом идентификации базовой станции и имеет результирующее среднее значение, равное нулю.
В блоке 114 базовая станция 10А, 10В, 10С вычисляет установленное время перед началом передачи последующих радиомаяков, основанное на функции текущей флуктуации радиомаяка, и средний период Т между передачами радиомаяка для частной системы радиосвязи. В блоке 116 базовая станция 10А, 10В, 10С ожидает расчетное установленное время, прежде чем вернуться к блоку 110 для начала передачи другого радиомаяка и повторить стадии в блоках 112, 114 и 116 для вычисления и ожидания флуктуационного временного интервала вплоть до следующей передачи.
На фиг. 10 показана работа подвижного терминала 14 в одном из вариантов настоящего изобретения. В блоке 120 подвижный терминал 14 принимает переданный сигнал радиомаяка от базовой станции 10А, 10В, 10С. В блоке 122 подвижный терминал 14 выявляет текущее состояние базовой станции 10А, 10В, 10С из информации, переданной радиомаяком. Затем подвижный терминал 14 определяет доступность идентифицированной базовой станции для связи с подвижным терминалом 14 на основании полученной информации о состоянии базовой станции в блоке 124. Базовая станция может быть недоступна, например, если подвижный терминал 14 не является зарегистрированным пользователем этой базовой станции. Если информация о состоянии указывает на то, что соответствующая базовая станция 10А, 10В, 10С не доступна для связи с подвижным терминалом 14, подвижный терминал 14 возвращается в блок 120 и продолжает принимать передаваемые сигналы радиомаяков от других базовых станций 10А, 10В, 10С.
Если полученная информация о состоянии указывает, что базовая станция 10А, 10В, 10С доступна для связи с подвижным терминалом 14, в блоке 126 подвижный терминал 14 получает код идентификации базовой станции из полученного сигнала радиомаяка. Соответствующая заданная функция флуктуации для идентифицированной базовой станции определяется в блоке 128. В блоке 130 подвижный терминал 14 синхронизируется с радиомаяком идентифицированной базовой станции 10А, 10В, 10С на основании заданной функции флуктуации, связанной с идентифицированной базовой станцией при работе блока 128. После этого подвижный терминал 14 ожидает отметку времени для разнесенных по времени передач радиомаяка от идентифицированной базовой станции 10А, 10В, 10С и поддерживает синхронизацию до тех пор, пока он не выйдет за пределы дальности действия 12', 12", 12'" идентифицированной базовой станции 10А, 10В, 10С.
Как показано на фиг.10, полученная информация о состоянии станции сопровождается идентификацией базовой станции. Специалистам понятно, что настоящее изобретение может быть также успешно реализовано, если идентификация будет выполнена в самом начале. После этой операции подвижный терминал 14 на основании идентификации может определить, является ли эта базовая станция разрешенной для связи, и, если это так, получает информацию о состоянии станции. Если код идентификации базовой станции отсутствует в списке базовых станций подвижного терминала 14, информация о состоянии станции не может быть получена.
Изобретение относится к системам радиосвязи, в частности к несогласованным частным системам радиосвязи. Технический результат - предотвращение помех при перекрытии зон действия несогласованных частных сетей радиосвязи. Передача сигналов радиомаяка между частной базовой радиостанцией и подвижным терминалом в пределах диапазона передачи частной базовой радиостанции обеспечивается передачей сигналов радиомаяка в хаотически изменяющихся временных интервалах. Частная базовая станция передает пакеты радиомаяка в указанных хаотически и псевдослучайно изменяющихся временных интервалах, чтобы предотвратить повторные столкновения радиомаяков между несогласованными частными сетями радиосвязи с перекрываемыми диапазонами передачи. Флуктуация сигналов радиомаяка выполняется псевдослучайно по модели, связанной с кодом идентификации базовой станции. Подвижный терминал получает код идентификации, присваиваемый базовой станции, и информацию о состоянии станции из принятых сигналов радиомаяка и определяет, доступна ли данная базовая станция для связи с подвижным терминалом. Затем подвижный терминал синхронизируется с флуктуирующей передачей радиомаяка базовой станции по заданной функции формирования флуктуации, связанной с кодом идентификации базовой станции, полученным из принятых сигналов радиомаяка. Подвижный терминал может легко поддерживать синхронизацию с одной или несколькими частными базовыми станциями сети радиосвязи без срыва синхронизации из-за столкновений пакетов сигналов радиомаяков, передаваемых между базовыми станциями. 5 с. и 9 з.п. ф-лы, 10 ил.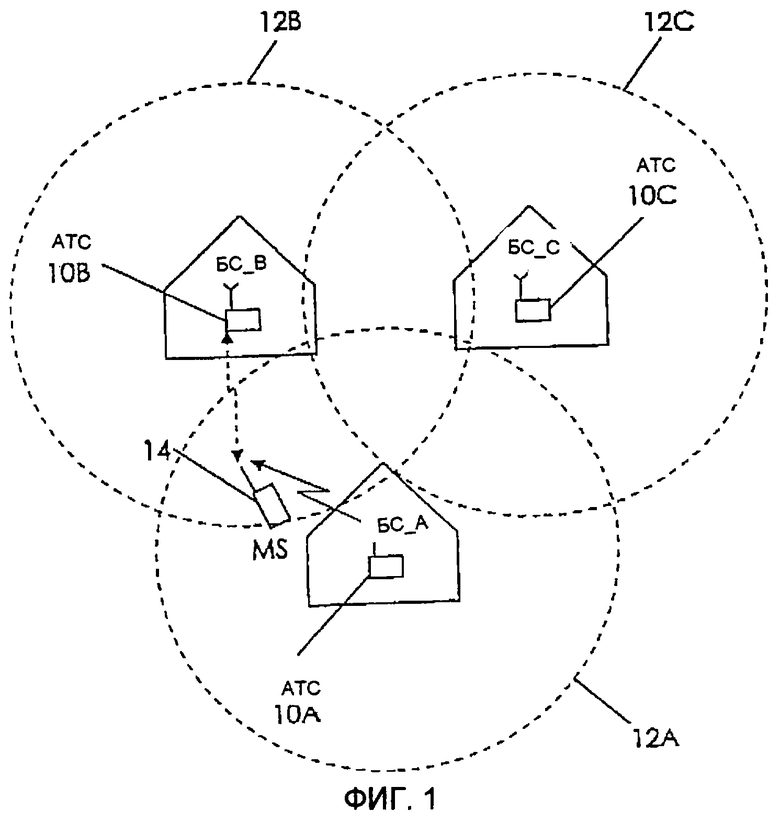
| US 4703324 А, 27.10.1987 | |||
| Способ радиосвязи с подвижными объектами в системе связи сотовой структуры | 1989 |
|
SU1626412A1 |
| ГИДРОЦИКЛОННО-ФИЛЬТРОВАЛЬНАЯ УСТАНОВКА ДЛЯ ОЧИСТКИ ВОДЫ | 2003 |
|
RU2264842C2 |
| US 4539706 А, 03.09.1985. | |||
