Область техники, к которой относится изобретение
Изобретение относится к области подвижной радиосвязи, и более конкретно - к усовершенствованным способу и системе для определения местоположения подвижного радиотерминала.
Уровень техники
В области сотовой связи все более актуальной становится задача определения местоположения подвижных радиотерминалов. Кроме того, в настоящее время уполномоченные ответственные за определение технических условий систем подвижной радиосвязи и стандартов включаются в процесс определения точности, необходимой при определении местоположения подвижного терминала. Наиболее успешные методы, используемые до сих пор для определения местоположения подвижных терминалов, основаны на измерениях значений времени прохождения сигнала, которые, в свою очередь, в дальнейшем используются для вычисления расстояний. Эти измерения времени прохождения сигнала проводят по восходящей линии связи (измерения в базовой станции передач из подвижного терминала) или по нисходящей линии связи (измерения в подвижном терминале передач из базовой станции).
Например, в международной заявке на имя Гош (Ghosh) и другие ("Гош") WO 96/35958 раскрыты способ и система для определения местоположения подвижного терминала в системе связи множественного доступа с кодовым разделением каналов (МДРК) (например, в соответствии со стандартом IS-95). В этой заявке предложен способ, с помощью которого измерения абсолютного времени поступления (ВП) сигнала, переданного подвижным терминалом, проводят по меньшей мере двумя базовыми станциями. Эти измерения ВП преобразовывают в значения расстояния. Метод триангуляции используется для того, чтобы определить местоположение подвижного терминала. Однако недостатком раскрытого способа ВП определения местоположения является необходимость использования высокоточной или "точной" опорной синхронизации (например, как в Глобальной Системе Определения Местоположения ГСОМ (GPS).
Ландвист (Lundqvist) и другие ("Ландвист") в заявке на РСТ PCT/SE97/00219 (и соответствующая заявка на выдачу патента США 08/799039) раскрыли способ и устройство для определения местоположения подвижного терминала в несинхронизированной среде (например, без использования "точной" опорной синхронизации. Вместо этого для измерений времени прохождения по нисходящей линии связи используется множество неподвижно расположенных "опорных" радиотерминалов, местоположения которых известны. Относительный сдвиг времени передачи между базовыми станциями определяется и используется для вычисления местоположения подвижного терминала.
Берквист (Bergkvist) и другие ("Берквист") в заявке на РСТ PCT/SE96/03561-3 (и соответствующая заявка на выдачу патента США 60/028345) раскрыли способ и устройство для определения местоположения подвижного терминала в сотовой системе подвижной радиосвязи, такой как Глобальная система Подвижной Связи (ГСПС (GSM)). Подвижному терминалу выдают команду на выполнение последовательности перераспределения каналов связи в нескольких целевых базовых станциях. Подвижный терминал также передает пакет доступа в целевую базовую станцию. Однако эта целевая базовая станция не передает сообщение с подтверждением о получении пакета доступа. Подвижный терминал затем возвращается к своей служебной базовой станции. Эта целевая базовая станция использует полученный пакет доступа для измерения продолжительности прохождения в прямом и обратном направлениях (базовая станция - подвижный терминал - базовая станция). Следовательно, для вычисления местоположения подвижного терминала не нужен опорный синхронизирующий сигнал.
Недостаток способа, раскрытого в вышеупомянутой заявке Гоша, заключается в том, что для использования глобальной опорной синхронизации по времени, такой как сигнал ГСОМ, и точного определения местоположения подвижного терминала требуются базовые станции. Аналогично, в способе, раскрытом в заявке Ландвиста, хотя и избегается использование глобальной опорной синхронизации по времени, вместо этого используется сложная система "опорных" радиотерминалов, местоположения которых известны, для того, чтобы получить значения относительных сдвигов при синхронизации базовых станций. Недостатком заявки Бергквист является то, что в ней используются измерения задержек по времени при прохождении сигнала в прямом и обратном направлениях от выполнения последовательности прерванных передач обслуживания. В этом способе затрачивается значительное количество времени для завершения, и он создает существенные помехи вследствие передачи отдельных пакетов доступа в некоторые базовые станции. Однако эти пакеты доступа вырабатываются только с целью определения местоположения подвижного терминала.
Таким образом, существует потребность в определении местоположения подвижного терминала без использования сложных опорных синхронизаций, "опорных" подвижных терминалов и "возмущения" прерванных передач обслуживания с использованием основных функций сотовой системы подвижной радиосвязи. Как описано ниже, настоящее изобретение позволяет удовлетворить эту потребность и устранить вышеописанные недостатки.
Сущность изобретения
Одна проблема, к которой обращено настоящее изобретение, заключается в том, как измерить расстояние между базовой станцией и подвижной станцией без необходимости использования глобальной опорной синхронизации по времени.
Другая проблема, к которой обращено настоящее изобретение, заключается в том, как определить географическое местоположение подвижного терминала в несинхронизированной системе подвижной радиосвязи (без глобальной опорной синхронизации по времени) при устранении необходимости в дополнительном оборудовании для определения местоположения (например, "опорных" радиотерминалов для определения сдвигов во времени между базовыми станциями).
Другая проблема, к которой обращено настоящее изобретение, заключается в том, как определить географическое местоположение подвижных радиотерминалов без создания ненужных "помех" (например, пакетов доступа, которые передаются в прерванной передаче обслуживания).
Поэтому задача настоящего изобретения состоит в обеспечении способа и системы для определения местоположения подвижного терминала, работающего в диалоговом режиме непосредственно на цифровом или аналоговом (но способном переносить цифровую информацию) канале информационного обмена системы подвижной радиосвязи.
Другой задачей настоящего изобретения является обеспечение способа и системы, которые решают вышеописанную задачу, и в которых система подвижной радиосвязи представляет собой, например, МДКР (CDMA), широкополосную МДКР (ШПМДКР (WCDMA)) или систему множественного доступа с разделением по времени (МДРВ (TDMA)).
Другая задача настоящего изобретения заключается в обеспечении способа и системы, которые решают вышеописанную задачу, и в которых функция определения местоположения реализована с помощью системы, которая передает и проводит измерения по заранее известным информационным признакам (то есть, не требующим передачи переменной информации).
Другая задача настоящего изобретения заключается в обеспечении способа и системы, которые решают вышеописанные задачи и в которых относительные сдвиги во времени, возникающие при передачах из базовых радиостанций, можно определить с использованием одного подвижного терминала и в дальнейшем применять для определения местоположения других подвижных терминалов.
Согласно настоящему изобретению, вышеуказанные и другие задачи решены с помощью новых способа и системы для определения местоположения подвижных терминалов в сотовой системе подвижной радиосвязи. Проводя аналогии с областью воздушного движения, например, при обращении к расписанию воздушного движения, можно заметить, что время вылета и прилета самолета указывается по местному времени. При рассмотрении расписания воздушного движения Восток-Запад между двумя городами (например, Далласом и Стокгольмом), местное время в этих городах может отличаться на несколько часов. Следовательно, истинная продолжительность прохождения по маршруту, необходимая для перелета из одного города в другой (например, из Далласа в Стокгольм) отличается от истинной продолжительности прохождения по маршруту, необходимой для перелета по этому маршруту в противоположном направлении (например, из Стокгольма в Даллас), если значения местного времени используются для подсчета времени прилета в расписании. Однако относительно просто вычислить реальное время прохождения по маршруту для пассажира путем сложения истинной продолжительности прохождения по маршруту при перелете в направлении Восток-Запад (например, из Далласа в Стокгольм) с истинной продолжительностью прохождения по маршруту для обратного перелета (например, из Стокгольма в Даллас) и деления полученного результата на два. По существу, используя этот метод вычисления времени полета "туда и обратно" или в прямом и обратном направлениях, время, которое "теряется" при перелете в прямом направлениях, равно времени, которое "добавляется" при перелете в обратном направлении, и результат является независимым от местного времени. В конечном счете, для определения расстояния между двумя городами, вычисленное реальное время можно умножить на скорость самолета, который совершает перелет.
Аналогичным образом, согласно настоящему изобретению, способ вычисления времени прохождения в прямом и обратном направлениях используется для того, чтобы определить расстояние между подвижной радиостанцией (ПС) и базовой радиостанцией (БС) с использованием истинных времен прохождения сигнала по восходящей линии связи и по нисходящей линии связи (например, Т-восходящей и Т-нисходящей). В этом случае не требуется абсолютной опорной синхронизации по времени. ПС и БС передают сообщения в служебный узел, расположенный в сети подвижной связи значения местного времени отправления и поступления сигналов восходящей и нисходящей линиям связи, и вычисляют истинные продолжительности прохождения сигнала при прохождении сигналов Т-восходящей и Т-нисходящей. Расстояние D между ПС и БС можно вычислить как:
D=c(T-вверх+Т-вниз)/2,
где с - скорость света.
Согласно первому варианту осуществления настоящего изобретения расстояние между ПС и конкретной базовой радиостанцией (БС1) можно определить с помощью следующего нового способа определения продолжительности прохождения сигнала в прямом и обратном направлениях. Команду на первое измерение посылают с помощью контроллера сети (например, с помощью коммутационного центра услуг подвижной радиосвязи или КЦУПР) в БС1, который выдает команду БС1 на измерение времени поступления по местному времени (L-TOA-U) первого сигнала (например, известной обучающей последовательности), который будут передавать (по восходящей линии связи вверх) с помощью ПС в пределах определенного временного окна. В отношении передачи по нисходящей линии связи, БС1 обычно периодически передает второй сигнал по нисходящей линии связи (например, пилот-сигнал в системе ШМДКР) по местному времени (L-TOT-D) передачи. Эти вторые сигналы можно принимать с помощью всех ПС, которые делают это необязательным для сетевого контроллера, который выдает команду БС1 посылать закрепленный сигнал по нисходящей линии связи в определенное время. Сетевой контроллер посылает вторую команду на измерение в ПС через свою служебную БС (БСО), которая выдает команду ПС на передачу первого сигнала (по восходящей линии связи) внутри специфического определенного окна и сообщает свое точное местное время (L-TOT-U) передачи. Вторая команда на измерение также выдает команду ПС на измерение и сообщение местного времени (L-TOA-D) поступления второго сигнала (по каналу вниз), который передается с помощью БС1. Кроме того, первая и вторая команды идентифицируют нисходящие и восходящие линии связи, которые будут использованы для вышеописанных передач и измерений. ПС и БС1 передают сообщение о соответствующих измерениях L-TOA-D и L-TOA-U в сетевой контроллер, который посылает дальше эту информацию вместе с идентификацией ПС в процессор, расположенный в сетевом служебном узле. Процессор вычисляет расстояние между ПС и БС1 с использованием выражения (1).
Согласно второму варианту осуществления настоящего изобретения (например, в системе МДКР или ШМДКР) время передачи из ПС в служебную ВС (БСО) можно определить с помощью нового способа, который устанавливает соединение (например, вызов) между БСО и ПС. Для определения задержки прохождения сигнала в прямом и обратном направлениях в течение соединения можно использовать известную технику согласованного фильтра. Значение результирующей задержки прохождения сигнала в прямом и обратном направлениях делят на 2 и результат умножают на скорость света, получая в результате расстояние между ПС и БСО. Тот же самый способ можно использовать для определения расстояния между ПС и двумя соседними БС (БС1 и БС2). Известный алгоритм триангуляции используется в дальнейшем для определения местоположения ПС.
Согласно третьему варианту осуществления настоящего изобретения (например, в системе МДРВ), время прохождения сигнала от ПС в служебную БС (БСО) определяют с помощью известного метода Опережения Синхронизации (ОС). Как и во втором варианте осуществления, для определения задержки прохождения сигнала в прямом и обратном направлениях можно использовать известный метод согласованной фильтрации.
Расстояние между ПС и БСО вычисляют с помощью деления значения задержки прохождения сигнала в прямом и обратном направлениях на два и умножения полученного результата на скорость света. В этом случае для определения расстояния между ПС и двумя соседними БС (БС1, БС2) снова можно использовать тот же самый способ. В дальнейшем для определения местоположения ПС используется известный алгоритм триангуляции.
Согласно четвертому варианту осуществления настоящего изобретения местоположение, полученное для одной ПС (ПС1), и полученные расстояния от этой ПС1 до соседних базовых станций (например, БС1, БС2 и так далее) используются сетевым служебным узлом определения сдвигов во времени (передачи) этих соседних БС относительно служебных БС (БСО) ПС1. Местоположение второй ПС (ПС2) затем определяют в соответствии с известным способом ВП по восходящей линии связи или по нисходящей линии связи. Следует обратить внимание, в качестве конкретного примера, что местоположение, полученное для ПС1 необходимо определять несколько раньше измерений ПС2, так как сигналы тактовых импульсов БС могут дрейфовать. Соседние БС передают сообщение АВП по местному времени в служебный узел через сетевой контроллер (например, КЦУПР). Служебный узел уже знает о сдвигах во времени соседних БС.
Согласно пятому варианту осуществления настоящего изобретения радио-БС предусмотрена для определения местоположения ПС с использованием метода определения местоположения по прохождению сигнала в прямом и обратном направлениях. БС включает в себя блок управления, имеющий местную синхронизацию. Блок управления в ответ на получение команды на передачу сообщения, передает сообщение о местном времени передачи по нисходящей линии связи (L-TOT-D) и о местном времени поступления по восходящей линии связи (L-TOA-U) с синхронизирующей последовательностью, по восходящей и по нисходящей линиям связи между БС и ПС. БС также включает в себя передатчик, который передает сообщение в блок управления на момент времени, когда сигнал передается по нисходящей линии связи (L-TOT-D). В БС также входит приемник, в котором используется согласованный фильтр или коррелятор с перестраиваемым опорным сигналом для определения момента времени поступления сигнала восходящей линии связи (L-TOA-U). Приемник передает сообщение с этой информацией в блок управления.
Согласно шестому варианту осуществления настоящего изобретения радио-ПС предусмотрена для определения своего собственного местоположения с использованием метода определения местоположения по прохождению сигнала в прямом и обратном направлениях, так как это используется в пятом варианте осуществления для БС. Радио-ПС включает в себя блок управления, имеющий местную синхронизацию. Блок управления в ответ на получение команды на передачу сообщения сообщает местное время (L-TOT-U) передачи по восходящей линии связи и местное время (L-TOA-D) линии связи синхронизирующей последовательности нисходящей линии связи и восходящей линии связи между ПС и радио-БС. ПС также включает в себя передатчик, который передает сообщение в блок управления на момент времени передачи сигнала по восходящей линии (L-TOT-U) связи. В ПС также входит приемник, в котором используется согласованный фильтр или коррелятор с перестраиваемым опорным сигналом для определения момента времени поступления сигнала по нисходящей линии (L-TOA-D) связи. Приемник передает сообщение с этой информацией о времени в блок управления.
Важным техническим преимуществом настоящего изобретения является то, что используемый способ определения местоположения не требует БС, синхронизированных по времени, опорной синхронизации или "опорных" терминалов с известным местоположением. Настоящее изобретение также позволяет избежать образования ненужных "возмущений" пакета доступа.
Другим важным техническим преимуществом настоящего изобретения является то, что его можно использовать в любой системе подвижной связи, включая, например, МДКР, ШМДКР, МДРВ и множественный доступ с разделением по частоте (МДРЧ (FDMA)) или аналогичную систему, при условии, что такая система позволяет передавать цифровую информацию по восходящей линии связи и по нисходящей линии связи, и БС, и ПС позволяют измерять значения местного времени передачи и приема.
Другим важным техническим преимуществом настоящего изобретения является то, что оно позволяет использовать опорный синхронизирующий сигнал (например, опорный сигнал ГСОМ) в ВС, который делает ненужным проведение измерений по восходящей линии связи или по нисходящей линии связи.
Еще одним важным техническим преимуществом настоящего изобретения является то, что оно обеспечивает возможность использования ПС, местоположение которой было определено, в качестве "опорного" терминала с целью определения сдвигов синхронизации соседних БС. Следовательно, настоящее изобретение преимущественно уменьшает число измерений, необходимых для определения местоположения других ПС.
Перечень фигур чертежей
Сущность изобретения иллюстрируется ссылкой на сопровождающие чертежи, на которых:
фиг. 1 - схема сотовой системы подвижной радиосвязи, которую можно использовать для осуществления способа определения местоположения подвижной радиостанции (без требования использования опорного синхронизирующего сигнала), согласно предпочтительному варианту осуществления настоящего изобретения;
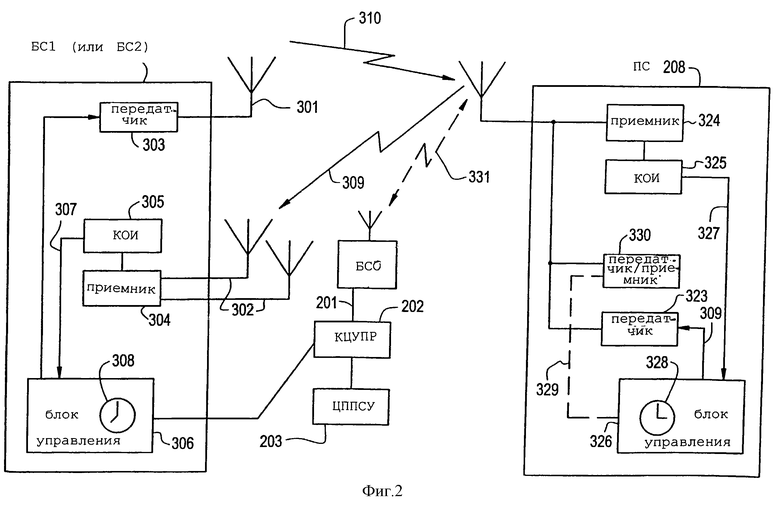
фиг. 2 - схема базовой радиостанции и подвижной радиостанции, которые имеют структуру, согласно предпочтительным вариантам осуществления настоящего изобретения; и
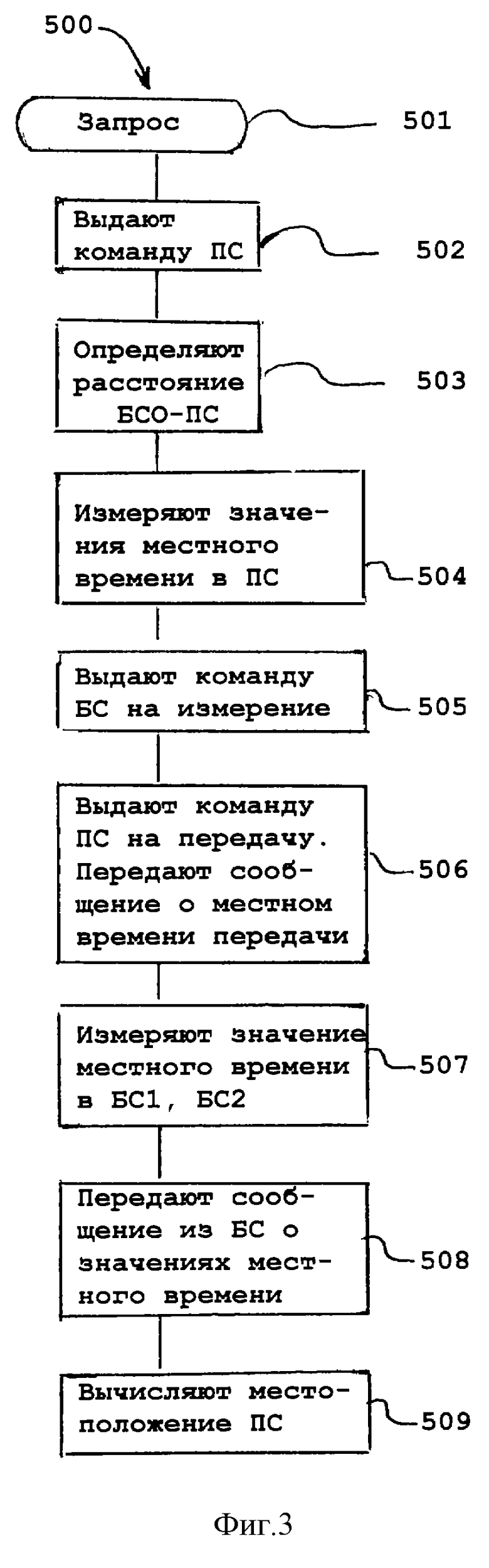
фиг. 3 - последовательность операций, в соответствии с которой реализуют способ определения местоположения подвижной радиостанции, осуществляемый вариантами по фиг.1 и 2.
Подробное описание чертежей
Предпочтительный вариант осуществления настоящего изобретения и его преимущества раскрыты со ссылкой на фиг.1-3, на которых одинаковые позиции используются для обозначения одинаковых и соответствующих частей, изображенных на различных чертежах.
На фиг. 1 представлена схема сотовой системы 200 подвижной радиосвязи, которую можно использовать для осуществления способа определения местоположения подвижной радиостанции (без требования использования опорного синхронизирующего сигнала), согласно предпочтительному варианту осуществления настоящего изобретения. Система 200 включает в себя множество базовых радиостанций. Для простоты показаны только три базовые станции из этого множества базовых радиостанций: БСО (служебная базовая станция для подвижной радиостанции, местоположение которой необходимо определить) и две соседние базовые станции БС1 и БС2. Предпочтительно, БСО, БС1 и БС2 расположены на различных участках и определяют различные ячейки, причем все они подсоединены к проводной сети (например, наземной подвижной сети общего пользования или НПСОП) через каналы 201 связи. Для представленного в качестве примера варианта осуществления, эта сеть включает в себя сетевой контроллер, такой как, например, коммутационный центр услуг подвижной радиосвязи (КЦОПР) 202, который подсоединяется через коммутируемую телефонную сеть общего пользования или КТСОП (для упрощения не показано) к центру подвижного позиционирования служебного узла ЦППСУ 203, КЦОПР 202 включает в себя область памяти с таблицей 204 поиска, которая связывает специфические радиоканалы со специфическими подвижными радиостанциями (например, ПС 208). Функция таблицы 204 поиска позволяет КЦОПР 202 передавать сообщение в служебный узел ЦППСУ о передаче сигнала по восходящей линии связи и по нисходящей линии связи и значения времени поступления и связывать эти времена с подвижной станцией(ями) (например, ПС 208). Каждый ПС поддерживает связь с БС через беспроводный радиоинтерфейс (например, беспроводный интерфейс 211, расположенный между БСО и ПС 208).
В этом варианте осуществления, служебный узел ЦППСУ 203 включает в себя процессор 203а, который дополнительно включает в себя приемный блок 203b, блок 203с памяти, блок 203d отправления и первый и второй блоки 203е и 203f вычисления, соответственно. Процессор 203а поддерживает информацию о географическом местоположении для каждой БС в блоке 203с памяти. Блоки 203е и 203f вычисления используются для вычисления местоположения о включенной ПС (например, ПС 208) с использованием сохраненной информации о местоположении БС и сообщенных значений о местном времени передачи или времени поступления (из КЦОПР 202) для сигналов нисходящей линии связи и восходящей линии связи.
Например, первый блок 203е вычисления можно использовать для вычисления расстояния D прохождения сигнала в прямом и обратном направлениях между ПС (например, ПС 208) и БС (например, БС1) следующим образом:
D=c(Т-вверх + Т-вниз)/2, (2)
из сообщенных значений местного времени передачи (L-TOT-U, L-TOT-D), и местного времени поступления (L-TOA-U, L-TOA-D), где
Т-вверх=(L-TOA-U-L-TOT-U), и (3)
Т-вниз=(L-TOA-D-L-TOT-D). (4)
Второй блок 203f вычисления можно использовать для вычисления местоположения ПС с учетом (например, ПС 208) использования информации о расстоянии D прохождения сигнала в прямом и обратном направлениях между этой ПС и по меньшей мере тремя базовыми радиостанциями (например, БСО, БС1, БС2).
В дополнение второй блок 203f вычисления может также использовать любую сообщенную информацию о направлении прихода (НПХ), если она поступает из антенных решеток для определения местоположения ПС. В этом случае местоположение ПС можно легко определить из расстояния D прохождения сигнала в прямом и обратном направлениях и из информации НП по отношению к одной БС. Эта ПС также располагается на определенном азимуте (НП) и расстоянии от задействованной БС.
Блок 203с памяти поддерживает известные местоположения базовых радиостанций сети (например, БСО, БС1, БС2). Блок 203b приема и блок 203d отправления обеспечивают средство для служебного узла ЦППСУ 203 для того, чтобы поддерживать связь с сетевым контроллером (КЦОПР 202), а также с абонентами, запрашивающими/получающими информацию о местоположении ПС (например, с использованием услуги коротких сообщений или УКС-услуги).
Во время работы предполагается, что ПС 208 является ПС, местоположение которой необходимо определить. Показанная двунаправленная линия 211 связи представляет собой соединение сигнала (например, вызов) между ПС 208 и своей служебной БСО. КЦОПР 204 посылает командное сообщение через соединение 211 к ПС 208 и выдает команду ПС 208 на выполнение функций определения местоположения. ПС 208 передает через соединение 211 свою сообщенную передачу с местным сигналом и значения времени поступления, которые принимает БСО и передает в КЦОПР 202. Каждое из соединений 212 и 213 сигналов по восходящей линии связи (к БС1 и БС2, соответственно) представляет собой последовательность определения местоположения, которая передается по восходящей линии связи и принимается БС1 и БС2. Для этого приведенного в качестве примера варианта осуществления информация о последовательности определения местоположения должна представлять собой только заранее определенную временную метку. Аналогичным образом, каждое из соединений 214 и 215 сигнала по нисходящей линии связи (из БС1 и БС2, соответственно) представляет собой последовательность определения местоположения, которая передается по нисходящей линии связи с помощью БС1 и БС2 и принимается ПС 208. Для этого варианта осуществления эта информация о последовательности определения местоположения должна представлять собой только заранее определенную временную метку. Однако для другого варианта осуществления эти предопределенные временные метки можно выполнить в виде пилот-сигналов, которые передают с помощью БС1 и БС2 в системе МДРК или ШМДРК.
Расстояние от соседних базовых станций (БС1, БС2) до ПС (208) можно определить с помощью вышеописанного способа определения местоположения по прохождению сигнала в прямом и обратном направлениях. Расстояние от служебной базовой станции (БСО) до ПС (208) можно определить стандартным способом измерения расстояния с опережением синхронизации (например, в системе МДРВ) или стандартным способом измерения расстояния согласованным фильтром (например, в системе МДКР или ШМДКР). Эти расстояния между ПС (208) и базовыми станциями (БСО, БС1, БС2), наряду с известной информацией о месторасположении БС, затем используются в алгоритме триангуляции для определения местоположения ПС.
На фиг.2 представлена схема базовой радиостанции и подвижной радиостанции, которые имеют структуру, выполненную в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Для этого варианта осуществления, базовая радиостанция БС1, (или БС2, ..., БСn) и подвижная станция ПС 208 являются частью системы ШМДКР. БС1 включает в себя передающую антенну 301 и две приемные антенны 302. Пара приемных антенн 301, преимущественно, обеспечивает разнесение по пространству для радиообмена информацией, а также для измерений по восходящей линии связи, в соответствии с настоящим изобретением. БС1 также включает в себя часть 303 передатчика, часть 304 приемника и согласованный фильтр 305, предпочтительно выполненный в виде фильтра с конечной импульсной характеристикой (КНХ). В фильтре 305 КИХ (подсоединенном к части 304 приемника) используется известный метод синхронизации для определения момента поступления сигнала 309 по восходящей линии связи в БС1, который использован в настоящем способе определения местоположения ПС 208. Блок 306 управления считывает из местного синхронизатора 308 (через соединение 307 из фильтра 305 КИХ в сообщенный момент времени) местное время (L-TOA-U) поступления восходящей линии связи, и передает эту информацию наряду с соответствующей информацией идентичности радиоканала, в КЦОПР 202.
ПС 208 имеет структуру, необходимую для осуществления способа определения местоположения ПС, согласно изобретению, и выполненную соответствующим путем, как и БС1. В этом варианте осуществления, ПС 208 включает в себя приемопередающую антенну 321, которая подсоединена к части 324 приемника, части 323 передатчика и части 323 передатчика/приемника. Согласованный фильтр 325 (выполнен также, как и фильтр КИХ) подсоединяется к части 324 приемника. В фильтре 325 КИХ используется известный метод синхронизации для определения момента поступления сигнала 310 нисходящей линии связи, в ПС 208, который необходимо использовать для настоящего способа определения местоположения ПС 208. Блок 326 управления считывает из местного синхронизатора 328 (через соединение 327 из фильтра 325 КИХ в сообщенный момент времени) местное время (L-TOA-D) поступления по нисходящей линии связи и передает эту информацию наряду с соответствующей информацией идентичности радиоканала в КЦОПР 202 через сигнальный тракт 329, часть 330 передатчика/приемника, антенну 321, беспроводный интерфейс 331 и служебную базовую радиостанцию БСО.
Блок 326 управления также вырабатывает сигнал 309 восходящей линии связи, который передается с помощью ПС 208 через часть 323 передатчика и антенну 321. Сигнал 309 восходящей линии связи, который принимают с помощью входящей в состав базовой станции (например, БС1), используется при реализации настоящего способа определения местоположения ПС. Блок 326 управления дополнительно считывает из местного синхронизатора 328 местное время (L-TOT-U) передачи для сигнала 309 восходящей линии связи и передает эту информацию наряду с соответствующей идентичностью радиоканала в КЦОПР 202. КЦОПР 202 обращается к поисковой таблице 204 (фиг.1) для определения идентичности подвижной станции, местоположение которой необходимо определить (например, ПС 208). Поисковая таблица также поддерживает, в дополнение к известной информации о местоположении БС, ассоциированные радиоканалы, пропускающие соответствующие сигналы 211, 212, 213, 214 и 215. Эти сигналы сохраняются в поисковой таблице, когда устанавливается вызов между служебной базовой станцией БСО и входящей в состав ПС (208), и командное сообщение посылают для инициализации настоящего способа определения местоположения ПС.
На фиг.3 представлена последовательность операций, которая представляет способ 500 определения местоположения подвижной радиостанции, который можно реализовать по вариантам осуществления настоящего изобретения (фиг.1 и 2). В этих вариантах осуществления система 200 является системой подвижной радиосвязи МДРК. На этапе 501 запрос для определения местоположения подвижной радиостанции (например, ПС 208) принимают в служебном узле ЦППСУ 203. Например, такой запрос может входить в ЦППСУ 203 в виде короткого текстового сообщения от абонента. В ответ на получение такого запроса, на этапе 502 ЦППСУ 203 посылает командное сообщение через КЦОПР 202 и служебную БСО в ПС 208, которая выдает команду ПС 208 на инициализацию функции определения местоположения для самой себя. Определение местоположения проводится с использованием данных о местоположении служебной БСО и соседних базовых станций БС1 и БС2, которые входят в известный алгоритм триангуляции. На этапе 503 БСО определяет расстояние между собой и ПС 208 с помощью вычисления временной задержки прохождения сигнала в прямом и обратном направлениях (БСО-ПС-БСО), используя известный способ согласованной фильтрации/корреляции, и передает сообщение с информацией об определенном расстоянии через КЦОПР 202 в ЦППСУ 203.
На этапе 504 ПС 208 измеряют моменты поступления по местному времени, L-TOA-D1 и L-TOA-D2, пилот-сигналов, которые передают из БС1 и БС2, соответственно, и передают эти значения времени поступления по местному времени через БСО и КЦОПР 202 в ПЦПСУ 203. На этапе 505 ПЦПСУ 203 посылает командное сообщение через КЦОПР 202 в БС1 и БС2, который выдает команду БС1 и БС2 на "прослушивание" для данных о местоположении, которые необходимо передать по восходящей линии связи из ПС 208 в течение специфического интервала. На этапе 506 ПЦПСУ 203 посылает командное сообщение в ПС 208 через КЦОПР 202 и БСО, которая выдает команду ПС 208 на передачу данных о местоположении в течение специфического интервала, и передает сообщение о точном времени передачи (L-TOT-U) через БСО и КЦОПР 202 в ПЦПСУ 203.
На этапе 507 БС1 и БС2 измеряют соответствующие моменты поступления по местному времени, L-TOA-U1 и L-TOA-U2, данных о местоположении, которые передают в течение специфического интервала, с использованием известного способа корреляции. На этапе 508 БС1 и БС2 передают сообщение о соответствующих значениях местного времени L-TOT-D1 и L-TOT-D2 базовой станции для переданных сигналов и местного времени L-TOA-U1 и L-TOA-U2 поступления сигналов базовой станции для принятых сигналов в ЦППСУ 203 через КЦОПР 202. На этапе 509 ЦППСУ 203 вычисляет местоположение ПС 208 с использованием местоположений известных БС и сообщенные значения местного времени в соответствии с вышеприведенными выражениями (2)-(4).
Следует отметить, что согласно настоящему изобретению, сигналы восходящей линии связи от ПС 208 можно передавать в любое соответствующее время, если местное время передачи сообщается из ПС 208. Однако в способах, известных из уровня техники, сигналы, которые передают по восходящей линии связи из подвижной станции, местоположение которой необходимо определить, передают в известные абсолютные моменты времени, связанные с синхронизацией служебной базовой станции и расстоянием между служебной базовой станцией и этой подвижной станцией. Следовательно, в качестве альтернативы способам, известным из уровня техники, расстояние между служебной базовой станцией и подвижной станцией можно определить, используя настоящий способ (фиг.3 для определения расстояний между БС1 и ПС 208, и БС2 и ПС 208, с помощью выполнения этапов 504-508, а не так, как было раскрыто для этапа 503.
Хотя был раскрыт и представлен на чертежах только предпочтительный вариант осуществления способа и устройства по настоящему изобретению, очевидным является, что изобретение не ограничено раскрытым вариантом осуществления и в отношении него могут быть выполнены многочисленные модификации и замены без изменения сущности изобретения, как она раскрыта выше и охарактеризована в нижеследующей формуле изобретения.
Предложены способ и система, с помощью которых вычисление продолжительности прохождения сигнала в прямом и обратном направлениях используется для определения расстояния между подвижной радиостанцией (ПС) и базовой радиостанцией (БС) (БСО, БС1, БС2) с использованием истинных значений продолжительности прохождения сигнала по восходящей и нисходящей линиям связи (например, Т-вверх и Т-вниз). При этом не требуется абсолютной опорной синхронизации. ПС и БС передают сообщения в служебный узел (203), расположенный в подвижной сети о значениях местного времени отправления и поступления с помощью сигналов, передаваемых по восходящей и нисходящей линиям связи, и вычисляют истинные продолжительности прохождения сигнала, Т-восходящую и Т-нисходящую. Расстояние D между ПС и БС можно вычислить по формуле D=с(Т-вверх+Т-вниз)/2, где с - скорость света. В алгоритме триангуляции для определения местоположения ПС можно использовать расстояния D1, D2 и D3 по меньшей мере для трех базовых станций, чье расположение известно. Технический результат заключается в обеспечении способа и системы определения местоположения подвижного терминала, работающего в диалоговом режиме на цифровом или аналоговом канале информационного обмена системы подвижной радиосвязи. 5 с. и 20 з.п.ф-лы, 3 ил.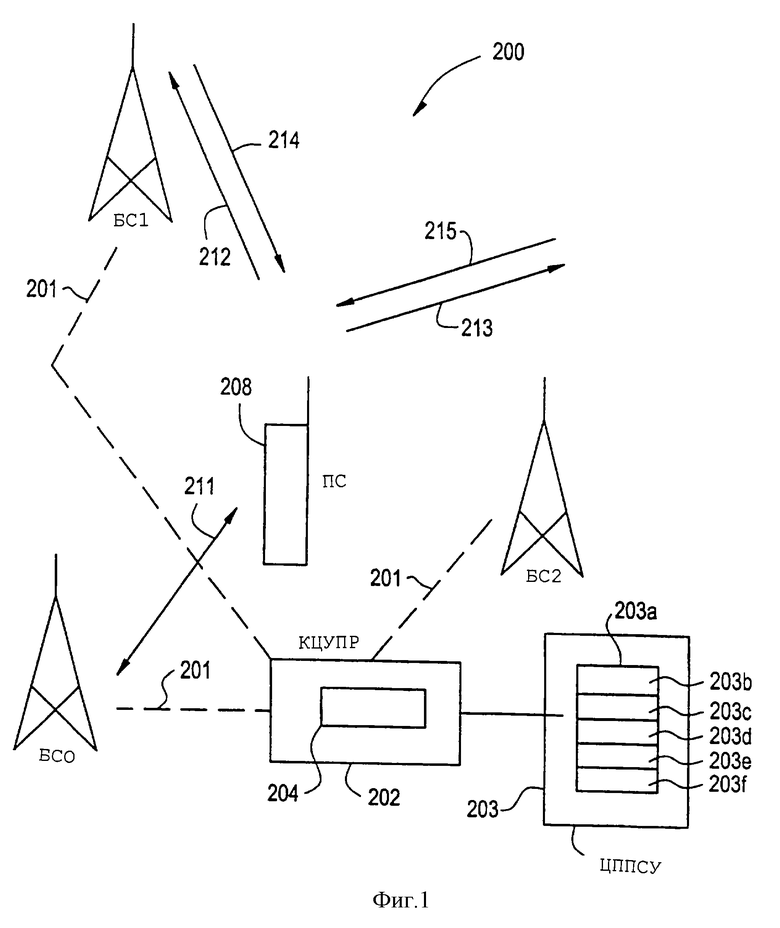
| 0 |
|
SU335558A1 | |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ N ОБЪЕКТОВ | 1988 |
|
SU1633990A1 |
| RU 95109373 А1, 10.05.1997 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| DE 4409178 А, 21.09.1995. | |||

