Изобретение относится к области автоматики и радиотехники, в частности к учебно-тренировочным средствам и может быть использовано при разработке дистанционно управляемых полигонных тренажеров для стрельбы, предназначенных для приобретения практических навыков в прицельной стрельбе по мишеням из любых видов стрелкового оружия, гранатометов, минометов, артиллерийских и танковых орудий по стационарным и подвижным целям, предлагаемый тренажер может быть установлен в тирах, на стационарных оборудованных полигонах (мишенных полях), а также на временно выделяемых территориях для проведения тренировок.
Известен полигонный тренажер, содержащий по крайней мере одну мишень и средство для поддержки этой мишени на определенном расстоянии от рубежа ведения огня, средство освещения по крайне мере на мгновение этой мишени для наблюдения стажером для стрельбы по мишени (см. пат. US 4203232, кл. F 41 G 3/26, 20.05.1980 г.).
Однако известное устройство имеет ограниченные функциональные возможности, так как служит лишь для ночных тренировок и не обеспечивает необходимой структуризации мишенного поля.
По технической сущности наиболее близким к предлагаемому является дистанционно управляемая система (тренажер) для стрельбы, содержащая комплект мишеней, удаленных друг от друга, приемник и выходной блок, причем каждая мишень оснащена пленочным пьезоэлектрическим преобразователем и передатчиком, содержащим блок модуляции, который преобразует принятый от датчика сигнал, модулирует его по определенной частоте, выбранной только для данной мишени, и передает в эфир, а выходной блок обрабатывает полученные приемником сигналы и обеспечивает подсчет и индикацию количества попаданий в мишень и набранных при этом очков (см. патент US 5553860, кл. F 41 J 5/02 от 10.09.1996 г.).
Однако и это известное устройство, несмотря на обеспечение обработки информации от нескольких мишеней, обладает ограниченными функциональными возможностями, так как не обеспечивает необходимую структуризацию мишенного поля с возможностью оперативного управления мишенями и получением полной информации о результатах тренировки.
Техническим результатом является расширение функциональных возможностей путем структуризации мишенного поля с обеспечением оперативного управления мишенями и получения информации о результатах тренировки.
Достигается это тем, что дистанционно управляемый полигонный тренажер для стрельбы содержит командный пункт, связанный системой двунаправленных шин управления и/или системой радиосвязи с объектами управления, размещенными на мишенном поле, которое разделено на М направлений, каждое из которых представлено в виде ряда из N рубежей объектов управления, число которых равное или разное для разных направлений, где N и М - целые числа, и систему питания, при этом командный пункт включает взаимосвязанные между собой пульт управления, устройство отображения и документирования информации и внутренние шины питания и управления, система двунаправленных шин управления связывает каждый i-ый выход-вход командного пункта с входом-выходом управления первого рубежа объектов управления i-го направления, где i=1...M, и выход-вход каждого предыдущего рубежа объектов управления с входом-выходом последующего рубежа этого направления при наличии последующего рубежа, система радиосвязи выполнена с обеспечением передачи команд управления от командного пункта к объектам управления и ответных сигналов от объектов управления на командный пункт, а система питания включает, как минимум, М аккумуляторных батарей для питания объектов управления и их контроллеров и/или включает распределенную сеть шин питания, связывающих шины питания направления мишенного поля с соответствующими выходными шинами питания командного пункта, дополнительно содержащего распределительное устройство для подачи питания на заданное командным пунктом количество рубежей, каждый из которых имеет шины питания, подключенные к соответствующим шинам питания своего направления, и содержит распределительное устройство, входные шины питания которого являются соответствующими шинами питания рубежа, К его выходных шин питания, где К - целое число, подключены к К шинам питания групп контроллеров объектов управления и к К шинам питания групп объектов управления, управляющий вход-выход распределительного устройства является входом-выходом управления рубежа, каждый из К управляющих выходов-входов распределительного устройства подключен к управляющему входу-выходу соответствующего контроллера объекта управления, L управляющих выходов-входов которого связаны с L управляющими входами-выходами соответствующего объекта управления, где L - целое число, при этом в качестве объекта управления может быть мишенная установка с мишенью или тележка для перемещения движущихся мишеней, или сигнализатор защитной боковой зоны, линии начала и прекращения ведения огня, или фиксатор прохождения рубежа, или любое подобное устройство, размещаемое на мишенном поле и имеющее вышеупомянутый контроллер для приема и передачи информации о своем состоянии и режиме работы на командный пункт с помощью системы двунаправленных шин управления или системы радиосвязи, кроме того, контроллер объекта управления содержит микропроцессор, блок силовых ключей, блок сопряжения, блок питания и внутренние шины питания и управления, причем вход блока питания подключен к соответствующей выходной шине питания распределительного устройства, выход по внутренним шинам питания подключен к микропроцессору, блоку сопряжения и блоку силовых ключей, управляющие выходы-входы которого являются соответствующими выходами-входами контроллера объекта управления, при этом микропроцессор взаимосвязан внутренними шинами управления с блоком силовых ключей и блоком сопряжения, каждый управляющий вход-выход блока сопряжения подключен к соответствующему входу-выходу контроллера или к входу-выходу приемопередатчика контроллера объекта управления, а также тренажер может быть снабжен устройством ручного управления, содержащим дисплей, клавиатуру, микропроцессор, блок питания, внутренние шины питания и управления и дуплексную шину управления для подключения к входу-выходу одного из контроллеров объекта управления, причем вход блока питания выполнен с возможностью подключения к выходной шине питания распределительного устройства, выход его соединен внутренней шиной питания с дисплеем, клавиатурой и микропроцессором, управляющий выход которого подключен через одну внутреннюю шину управления ко входу дисплея, управляющий вход - через вторую внутреннюю шину управления соединен с выходом клавиатуры, а управляющий вход-выход микропроцессора выполнен с возможностью подключения к управляющему входу-выходу распределительного устройства.
Согласно второму варианту изобретения технический результат достигается тем, что дистанционно управляемый полигонный тренажер для стрельбы содержит командный пункт, связанный системой питания и системой двунаправленных шин управления с объектами управления, размещенными на мишенном поле, которое разделено на М направлений, каждое из которых представлено в виде ряда из N рубежей объектов управления, число которых равное или разное для разных направлений, где N и М - целые числа, при этом командный пункт включает взаимосвязанные между собой пульт управления, устройство отображения и документирования информации, распределительное устройство для подачи питания на заданное командным пунктом количество рубежей и подачи команд управления на объекты управления и приема от них ответных сигналов и внутренние шины питания и управления, причем система двунаправленных шин управления связывает каждый i-ый выход-вход командного пункта с входом-выходом управления первого рубежа объектов управления i-го направления, где i=l... M, и выход-вход каждого предыдущего рубежа объектов управления с входом-выходом последующего рубежа этого направления при наличии последующего рубежа, а система питания включает распределенную сеть шин питания, связывающих шины питания направления мишенного поля с соответствующими выходными шинами питания командного пункта, при этом каждый рубеж имеет шины питания, подключенные к соответствующим шинам питания своего направления, и содержит распределительное устройство, входные шины питания которого являются соответствующими шинами рубежа, К выходных шин питания подключены к К шинам питания групп контроллеров объектов управления и К шинам питания групп объектов управления, где К - целое число, при этом управляющий вход-выход распределительного устройства является входом-выходом управления рубежа, каждый из К управляющих выходов-входов распределительного устройства подключен к управляющему входу-выходу соответствующего контроллера объекта управления, L управляющих выходов-входов которого связаны с L управляющими входами-выходами соответствующего объекта управления, где L - целое число, при этом в качестве объекта управления может быть мишенная установка с мишенью или тележка для перемещения движущихся мишеней, или сигнализатор защитной боковой зоны, линии начала и прекращения ведения огня, или фиксатор прохождения рубежа, или любое подобное устройство, размещаемое на мишенном поле и взаимосвязанное с вышеупомянутым контроллером для приема и передачи информации о своем состоянии и режиме работы по шинам управления, а распределительное устройство каждого рубежа содержит силовой распределитель питания групп контроллеров объектов управления и групп объектов управления, микропроцессор, контроллер качества сети питания, блок питания, внутренние шины питания и внутренние шины управления, причем вход блока питания и вход коммутируемого напряжения силового распределителя питания групп контроллеров объектов управления и групп объектов управления подключены к соответствующей шине питания рубежа, являющейся шиной питания мишенного поля, а выход блока питания связан внутренней шиной питания с микропроцессором, контроллером качества сети питания и силовым распределителем питания групп контроллеров и групп объектов управления, К выходных шин питания которого являются выходными шинами распределительного устройства и подключены через внутренние шины питания ко входу контроллера качества сети питания, выход которого подключен к информационному входу микропроцессора, К управляющих выходов которого через внутренние шины управления подключены к соответствующим управляющим входам силового распределителя питания групп контроллеров и групп объектов управления, К выходов-входов микропроцессора являются соответствующими выходами-входами распределительного устройства, а дополнительный управляющий вход-выход связан с входной шиной управления рубежа или с шиной для подключения к предыдущему рубежу, кроме того, блок питания распределительного устройства каждого рубежа снабжен, как минимум, одной аккумуляторной батареей.
Сущность изобретения заключается в том, что выполнение командного пункта и мишенного поля вышеописанным образом позволяет обеспечить весь цикл решения учебно-тренировочной задачи с возможностью проведения тренировки по выбранному сценарию с учетом оперативных команд руководителя тренировки, фиксацию времени, количества и точности поражения каждой мишени, подведения итогов тренировки и выдачу отчетов и рекомендаций по оценке действий тренируемых в соответствии с руководящими документами, а также передачу информации о проведенных тренировках вышестоящему начальнику и в единый учебный центр.
Сравнение предлагаемого устройства с ближайшим аналогом позволяет судить о соответствии критерию "новизна", а отсутствие отличительных признаков в известных аналогах говорит о соответствии критерию "изобретательский уровень".
Предварительные испытания подтверждают возможность широкого промышленного использования.
На фиг. 1 представлена функциональная блок-схема предложенного устройства; на фиг.2 - командного пункта; на фиг.3 - рубежа; на фиг.4 - распределительного устройства рубежа; на фиг.5 - контроллера объекта управления; на фиг.6 - устройства ручного управления; на фиг.7 - алгоритм работы пульта управления командного пункта.
Дистанционно управляемый полигонный тренажер для стрельбы (фиг.1) содержит командный пункт 1, мишенное поле 2 размещения объектов управления, разделенное на М направлений, каждое из которых представлено в виде ряда из N рубежей 3-1-1...3-М-Nм объектов управления, число которых равное или разное для разных направлений, где М и N - целые числа. Кроме того, тренажер может содержать устройство 4 ручного управления, приемопередатчик 5 для оперативной организации произвольной конфигурации мишенного поля и систему питания, которая может включать, как минимум, М аккумуляторных батарей для питания объектов управления и их контроллеров и/или может содержать распределенную сеть шин питания, включающую шины 6 питания от внешнего автономного источника или промышленной силовой сети и связывающую шины питания направления мишенного поля с соответствующими выходными шинами 7-1...7-М питания командного пункта 1.
Командный пункт 1 может быть связан системой двунаправленных шин 8-1... 8-М управления и/или системой радиосвязи с объектами управления, размещенными на мишенном поле 2.
Устройство 4 ручного управления имеет дуплексную шину 9 управления для подключения к одному из контроллеров объекта управления.
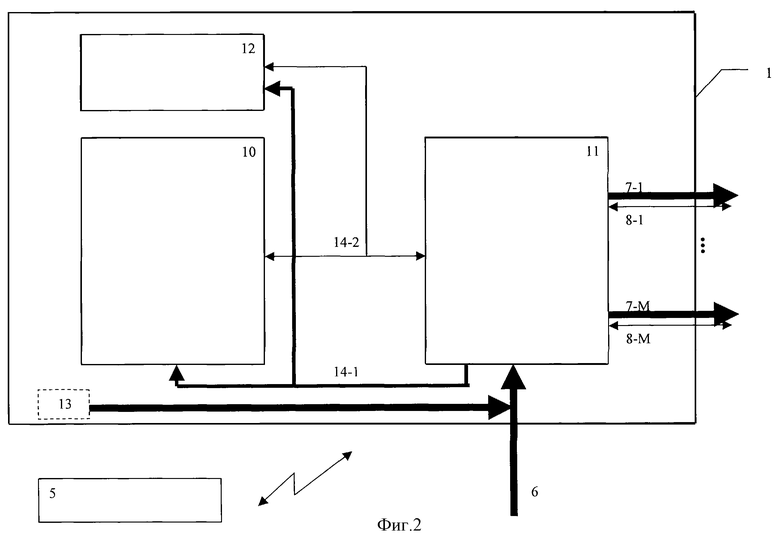
Командный пункт 1 (фиг. 2) может включать взаимосвязанные между собой пульт 10 управления полигоном, распределительное устройство 11 и устройство 12 отображения и документирования информации. Пульт 10 управления может быть реализован на базе промышленного компьютера, совместимого с персональной ЭВМ с микропроцессором фирмы Intel. Распределительное устройство 11 служит для подачи питания на заданное командным пунктом 1 количество рубежей 3-i-j, а его выходные шины питания и управления являются соответствующими выходными шинами 7-1...7-М питания и двунаправленными шинами 8-1...8-М управления командного пункта 1. Устройство 12 отображения и документирования информации может быть выполнено на базе монитора персональной ЭВМ, принтера и/или вынесенного экрана.
Кроме того, командный пункт 1 может содержать аккумуляторную батарею 13 автономного питания оборудования командного пункта 1, а также внутренние шины 14-1 и 14-2 питания и управления соответственно.
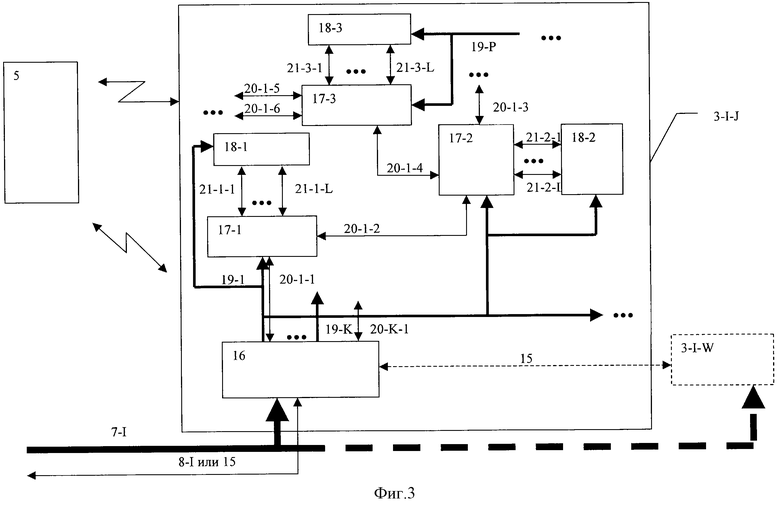
Каждый рубеж 3-i-j имеет шины питания, подключенные к соответствующим шинам своего направления, являющиеся соответственными шинами питания мишенного поля, подключенными к соответственным выходным шинам 7-1...7-М питания командного пункта 1, и связан с приемопередатчиком 5 системой радиосвязи. Кроме того, каждый рубеж 3-i-j может быть снабжен входной шиной управления для подключения к двунаправленной шине 8-i управления командного пункта 1 для первого рубежа 3-i-1 i-го направления или шиной 15 для подключения к предыдущему рубежу для 2-N рубежей 3-i-2...3-i-Ni i-го направления.
Каждый рубеж 3-i-j (фиг.3) содержит распределительное устройство 16, контроллеры 17-1...17-Q объектов управления и объекты 18-1...18-Q управления. Входные шины питания и управления распределительного устройства 16 являются соответствующими шинами рубежа, а К выходных шин 19-1...19-К питания, где К - целое число, подключены к К шинам питания групп контроллеров 17-1...17-Q объектов управления, и к К шинам питания объектов 18-1...18-Q управления, каждый из К управляющих выходов-входов 20-1-1...20-K-1 распределительного устройства 16 подключен к управляющему входу-выходу соответствующего контроллера 17-Р объекта управления, L управляющих выходов-входов 21-1-1...21-1-L которого связаны с соответствующими L управляющими входами-выходами соответствующего объекта 18-i управления, где L - целое число. Кроме того, каждый из контроллеров 17-1...17-Q связан с одним аналогичным контроллером 17-i другого объекта 18-i управления, который также имеет входные-выходные шины управления. Следует отметить, что у последнего контроллера 17-Q выходная шина управления не связана ни с каким другим контроллером.
В качестве объекта 18-i управления может быть мишенная установка с мишенью или тележка для перемещения движущихся мишеней, или сигнализатор защитной боковой зоны, линии начала и прекращения ведения огня, или фиксатор прохождения рубежа, или любое подобное устройство, размещаемое на мишенном поле 2 и способное передавать информацию на командный пункт 1.
Объект управления может содержать датчики состояния мишени (ограничение движения, подъема, опускания и т.д.), осветительный прибор, двигатели для подъема-опускания, движения, звуковые и цветовые (инфракрасные) имитаторы огня, пиропатроны для имитации взрыва и т.п.
В принципе в качестве объекта управления может быть использована типовая армейская мишень, способная обеспечивать функции управляемой мишени и имеющая связь с контроллером.
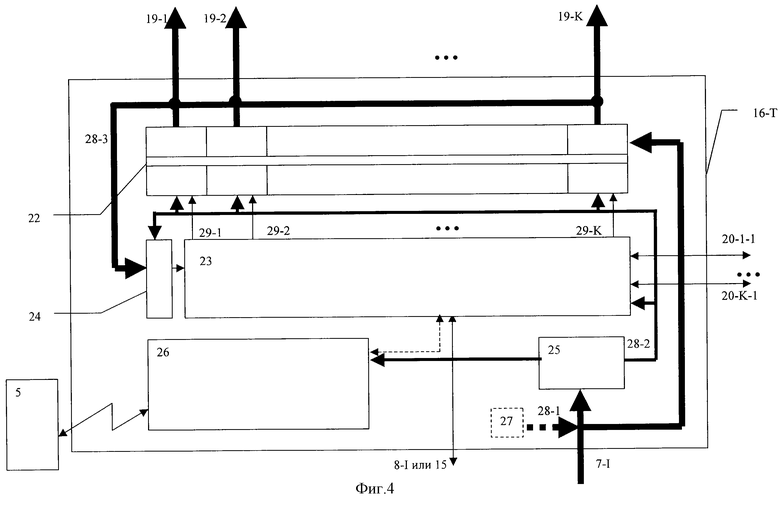
Распределительное устройство 16 каждого рубежа 3-i-j (фиг.4) содержит силовой распределитель 22 питания групп контроллеров объектов управления и групп объектов управления, микропроцессор 23, контроллер 24 качества сети питания и блок 25 питания.
Кроме того, распределительное устройство 16 может быть снабжено приемопередатчиком 26, и, как минимум, одной аккумуляторной батареей 27 для блока 25 питания, а также содержит внутренние шины 28-1...28-3 питания и внутренние шины 29-1...29-К управления.
Вход блока 25 питания подключен к соответствующей шине 7-1 питания рубежа, являющейся шиной питания мишенного поля 2, а выход связан внутренней шиной 28-2 питания с микропроцессором 23, контроллером 24 качества сети питания и силовым распределителем 22 питания, К выходных шин питания которого являются выходными шинами 19-1...19-К распределительного устройства 16 и подключены через внутренние шины 28-3 питания ко входу контроллера 24 качества сети питания, выход которого подключен к информационному входу микропроцессора 23.
К управляющих выходов микропроцессора 23 через внутренние шины 29-1... 29-К управления подключены к соответствующим управляющим входам силового распределителя 22 питания групп контроллеров и групп объектов управления, К выходов-входов микропроцессора являются соответствующими выходами-входами 20-1-1...20-К-1 распределительного устройства 16, а дополнительный управляющий вход-выход связан с входной шиной управления рубежа или с шиной 15 для подключения к предыдущему рубежу.
Контроллер 24 качества сети питания может быть выполнен по стандартной схеме, например, в виде блока сравнения параметров выходного напряжения с заранее заданными опорными значениями напряжения.
При выходе за пределы диапазонов информация с контроллера 24 передается в микропроцессор 23 для подготовки сообщения на командный пункт 1.
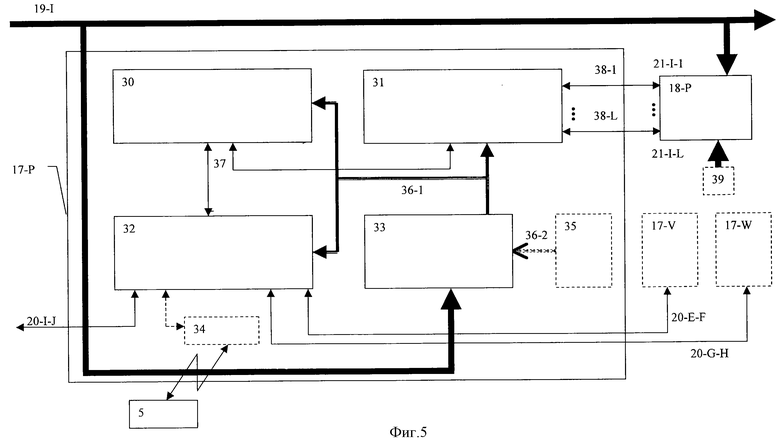
Контроллер 17-Р (фиг.5) объекта управления содержит микропроцессор 30, блок 31 силовых ключей, блок 32 сопряжения, блок 33 питания, приемопередатчик 34, аккумуляторную батарею 35 и внутренние шины 36-1, 36-2 и 37 питания и управления, причем вход блока 33 питания подключен к шине 19-1 питания распределительного устройства, выход по внутренним шинам 36-1 питания подключен к микропроцессору 30, блоку сопряжения 32 и блоку 31 силовых ключей, управляющие выходы-входы 38-1. . . 38-L которого являются соответствующими выходами-входами 21-I-1...21-I-L контроллера 17-Р объекта управления, который может быть запитан от аккумуляторной батареи 39. При этом микропроцессор 30 взаимосвязан внутренними шинами 37 управления с блоком 31 силовых ключей и блоком 32 сопряжения, а каждый управляющий вход-выход блока 32 сопряжения подключен к соответствующему входу-выходу контроллера 17-Р, подключенному к выходу-входу 20-I-J распределительного устройства, или к входу-выходу приемопередатчика 34 контроллера объекта управления.
Микропроцессор 30 может быть реализован на микросхеме AT89S8252. Блок 31 силовых ключей может быть реализован на мощных полевых транзисторах, каждый из которых служит для коммутации сигналов управления на соответствующем выходе-входе 38-i. Блок 32 сопряжения может быть выполнен на микросхеме ХС95ХХХ и служит для согласования уровней сигналов.
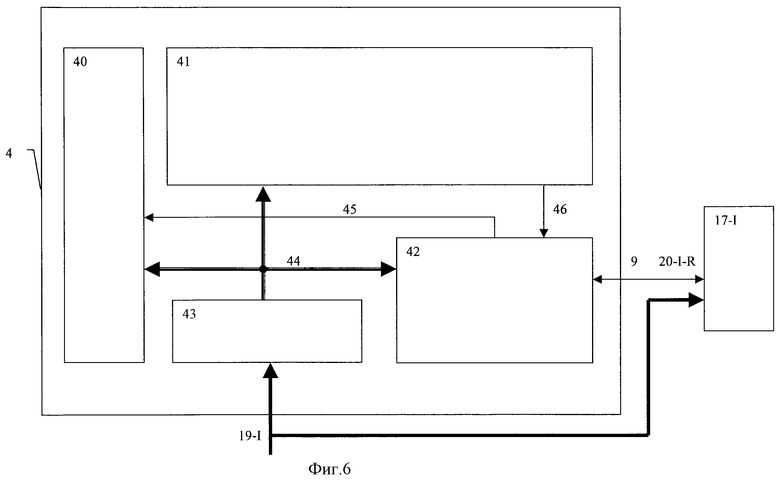
Устройство 4 ручного управления (фиг.6) содержит дисплей 40, клавиатуру 41, микропроцессор 42, блок 43 питания, внутренние шины 44 и 45, 46 питания и управления соответственно, дуплексную шину 9 управления для подключения к входу-выходу одного из контроллеров 17-1...17-Q объекта управления. Вход блока 43 питания выполнен с возможностью подключения к выходной шине 19-1 питания распределительного устройства 16, выход его соединен внутренней шиной 44 питания с входами питания дисплея 40, клавиатуры 41 и микропроцессора 42. Управляющий выход микропроцессора 42 подключен через одну внутреннюю шину 45 управления ко входу дисплея 40, управляющий вход через вторую внутреннюю шину 46 управления соединен с выходом клавиатуры 41, а управляющий вход-выход микропроцессора 42 соединен с дуплексной шиной 9 управления.
Таким образом, первый вариант предлагаемого тренажера представляет собой универсальное устройство, способное работать с использованием системы радиосвязи и/или системы двунаправленных шин управления, а также системы питания, содержащей, как минимум, М аккумуляторных батарей и/или распределенную сеть шин питания.
Второй вариант предлагаемого тренажера представляет собой более конкретное исполнение устройства с использованием только системы двунаправленных шин управления и системы питания в виде распределенной сети шин питания, с конкретным выполнением распределительного устройства каждого рубежа.
Устройство работает следующим образом.
Стадия развертывания дистанционно управляемого полигонного тренажера для стрельбы.
На территории, выбранной для проведения тренировки, определяется место размещения командного пункта 1 и мишенного поля 2, на котором намечаются направления и рубежи. Командный пункт 1 шиной 6 питания подключается к внешнему автономному источнику электрического напряжения, например к дизель-генератору или к промышленной силовой сети. Одновременно или вместо этого подключения может производиться подключение аккумуляторной батареи 13 автономного питания оборудования командного пункта 1. Вдоль каждого направления прокладываются шины 7-1... 7-М питания по числу направлений М, намеченных на мишенном поле 2, где М - целое число, которые подключаются к соответствующим шинам питания распределительного устройства 11 командного пункта 1.
На этой стадии проводится формирование схемы мишенного поля 2 с нанесением на нее различных ориентиров и препятствий. В процессе размещения мишеней на схеме сопоставляются физические и логические номера контроллеров 17-i объектов управления, причем физические номера задаются при изготовлении контроллеров 17-i и являются уникальными, а логические номера состоят из номера направления, номера рубежа 3-i-j и номера данного объекта на рубеже.
Одновременно вводится информация о распределении объектов 18-1...18-Q управления по группам, питающимся от одного силового кабеля, входящего в состав шины 7 питания объектов 18-1...18-Q управления, что позволяет в процессе тренировки дифференцировать во времени выдачу управляющих сигналов этим объектам, а следовательно, снижать величину электрического тока, текущего в момент одновременного подъема нескольких мишеней, и уменьшать тем самым износ силового кабеля, предохраняя его от излишнего перегрева.
Этот этап обязательно проводится при первичной установке дистанционно управляемого полигонного тренажера для стрельбы на данном полигоне. В дальнейшем этот этап работы допускается пропускать в ежедневной деятельности персонала полигона. Повторное выполнение этого этапа становится необходимым при внесении каких-либо изменений в конфигурацию расстановки мишенных установок, смены их типов, изменении конфигурации раскладки шин питания и/или управления.
Стадия подготовки сценария проведения тренировки.
На стадии подготовки сценария тренировки руководитель тренировки и оператор пульта 10 управления полигонным тренажером вводят в электронную вычислительную машину, входящую в состав пульта 10, необходимые данные, заключающиеся в описании текущей конфигурации мишенного поля 2 и способа расстановки объектов 18-1. . .18-Q управления с учетом их распределения по направлениям и рубежам 3-i-j стрельбы. Кроме того, в сценарии тренировки определяется время подъема и опускания мишеней относительно момента начала тренировки, включения и выключения приводов тележек с движущимися мишенями, направления и скорости их движения, моменты изменений этих направлений и скоростей, моменты срабатывания имитационных сигналов, имитирующих ведение встречного огня по тренирующимся и других имитируемых и реальных событий, возникновение которых планируется во время тренировки. При вводе в память ЭВМ пульта 10 управления конфигурации мишенного поля 2 вся информация о количестве установленных на стрельбовом поле распределительных колодцев и блиндажей, мишеней, единиц специального оборудования (фиксаторов прохождения рубежа, сигнальных фонарей исходного рубежа, сигнальных фонарей рубежа открытия огня, сигнальных фонарей рубежа прекращения огня, сигнальных фонарей основного направления, сигнальных фонарей боковых защитных зон, сигнальных фонарей безопасности и т. д. и т. п.), снабженных универсальными контроллерами 17-1...17-Q, с помощью сигналов, передаваемых по шинам 8-i или 15 управления командного пункта 1, отображается на устройстве 12 отображения и документирования информации, электрическое питание на которое подается с помощью внутренней шины 14-1 вторичного питания пульта 10 управления и в качестве которого может выступать дисплей ЭВМ, принтер и/или большой выносной экран, проецирование на который может осуществляться с ЭВМ. В дальнейшем тренировка проводится по утвержденному сценарию с учетом оперативно отдаваемых команд руководителя тренировки, который может вмешиваться в сценарий на любом этапе проведения тренировки.
Допускается задание различных видов мишеней как стационарных (легкие, средние, тяжелые), так и подвижных и вертолетных. При описании сценария осуществляется также описание режимов срабатывания датчиков поражения, размещенных на мишенных установках, например подъем и опускание мишени по командам управления с фиксацией ее в крайних положениях, подъем мишени по команде управления и ее автоматическое опускание при поражении с фиксацией времени и, возможно, точности поражения, подъем и опускание мишени по командам управления, регистрация количества поражений и времени каждого поражения. Для движущихся мишеней имеется дополнительная возможность задания времени включения и/или выключения электропривода в режимах движения вперед (вправо) или назад (влево) с автоматической остановкой в конце пути, движения вперед (вправо) или назад (влево) с реверсом хода в конце пути (обеспечение нужного количества проходов мишеней по путепроводу), изменения направления движения в любом месте, а также остановки в любом месте путепровода и движения с любой из возможных скоростей. Для сигнальных устройств допускается дополнительная возможность задания времени и вида подаваемых световых и/или звуковых сигналов (например, "Внимание", "Огонь", "Отбой" и тому подобных), описание которых может осуществляться заранее по нотам или другими способами в ЭВМ пульта 10 управления.
Сценарии, в том числе заготовленные заранее, могут храниться в памяти ЭВМ пульта 10 управления полигоном.
Перед запуском тренировки может производиться полная функциональная проверка правильности функционирования оборудования полигонного тренажера, информация о проведенных проверках может отображаться на устройстве 12 отображения и документирования информации командного пункта 1.
Стадия проведения тренировки.
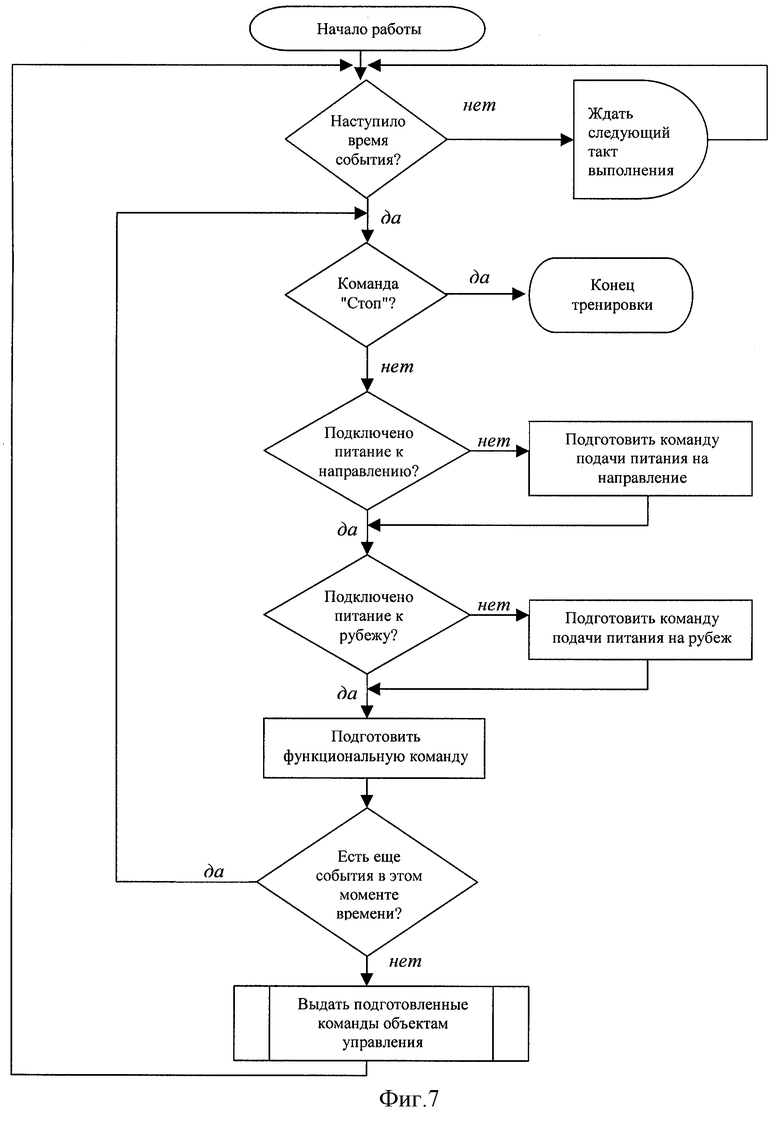
Работа пульта управления командного пункта проводится в соответствии с алгоритмом, иллюстрируемым на фиг.7.
Начало тренировки определяется подачей команды руководителем тренировки, которая вводится оператором командного пункта 1 в ЭВМ пульта 10 управления. Пульт 10 управления в соответствии с заданным сценарием в нужные моменты времени с помощью приемопередатчика 5 радиосигналов управления для командного пункта 1 выдает команды управления работой всех задействованных в сценарии тренировки распределительных устройств 11 и 16 и контроллеров 17-i объектов управления непосредственно, или по внутренней шине 14-2 выдает команды управления распределительному устройству 11 командного пункта 1, которое, в свою очередь, ретранслирует команды управления, относящиеся к другим распределительным устройствам 16 рубежей и контроллерам 17-i объектов управления, по шинам 8-i задействованных в сценарии тренировки направлений.
Распределительные устройства 16 рубежей, получив команду управления, относящуюся к распределительному устройству 16 другого рубежа или контроллеру 17-i объекта управления, в том случае, если распределительное устройство или контроллер подключены к данному распределительному устройству 16 шинами 15 или с помощью приемопередатчика 26, ретранслируют эту команду управления распределительному устройству 16 другого рубежа или контроллеру 17-i по шинам 15 или с помощью радиосигналов. Выбор конкретного вида связи определяет только способ доставки сообщений от пульта 10 управления к распределительным устройствам 16 и обратно. В случае, если распределительные устройства 16 или контроллеры 17-i объектов управления, которым предназначена данная команда управления, не связаны с данным распределительным устройством 16, получившим команду управления, то оно не выполняет никаких действий.
Распределительные устройства 16 рубежей предназначены для обеспечения маршрутизации сигналов управления, выдаваемых от пульта 10 управления к объектам 18-1... 18-Q управления, а также для своевременной коммутация шин питания 19-1. ..19-К. Осуществляется автоматический контроль состояния шин питания и управления, а также контроль качества сети. Допускается возможность работы с группами объектов. При этом осуществляется такое управление шинами питания, которое позволяет подавать питание только на те шины, на которых по сценарию происходит реальный подъем или реальное опускание мишеней и другие действия, требующие больших затрат электрической мощности, сдвигать во времени сигналы включения питания для экономии электроэнергии и предохранения силовых кабелей от перегрева.
Микропроцессор каждого распределительного устройства, получив команду, относящуюся непосредственно к данному распределительному устройству, определяет, какие именно шины 19-i питания должны быть скоммутированы по данной команде с шинами 28-2 питания, идущими от блока 25 питания данного распределительного устройства, и по внутренним шинам 29-i управления выдает управляющий сигнал силовому распределителю 22 питания групп контроллеров объектов управления и групп объектов управления. Одновременно с подачей питания на нужные шины 19-i питания силовой распределитель 22 питания по шине 28-3 внутреннего питания подает напряжение на устройство 24 контроля качества сети питания, которое при выходе его за границы заданного диапазона выдает сигнал обратной связи микропроцессору 23 распределительного устройства, что позволяет тому зафиксировать аварийную ситуацию на шинах 19-i. Блок 25 питания распределительного устройства 16 питается либо от шины 7-i, представляющей собой входную шину питания распределительного устройства 16, либо от шины 28-1 питания, являющейся выходной шиной аккумуляторной батареи 27.
Контроллеры 17-i объектов управления, получив команду управления, относящуюся к другому контроллеру 17-j объекта управления, в том случае, если этот контроллер подключен к данному шиной или с помощью приемопередатчика 34, ретранслируют эту команду управления другим контроллерам по шинам или с помощью радиосигналов. В случае, если контроллеры 17-j объектов управления, которым предназначена данная команда управления, не связаны с данным контроллером, данный контроллер не выполняет никаких действий.
Вторичное электрическое питание контроллеров 17-Р объектов управления осуществляется от его внутреннего блока 33 питания, который получает первичное электрическое напряжение от какого-либо распределительного устройства 16 по шине 19-i питания или от аккумуляторной батареи 35 автономного питания контроллера 17-Р объекта управления по внутренним шинам 36-2 питания контроллера объекта управления. Внутренняя шина 36-1 служит для передачи вторичного напряжения всем составным элементам контроллера 17-Р объекта управления.
Контроллер 17-Р объекта управления предназначен для принятия команд управления от пульта 10 управления и управления объектом 18-Р управления с выходов-входов 21-P-1...21-P-L в соответствии с этими командами. Команды, поступающие в контроллер 17-Р, через блок 32 сопряжения по шине 37 поступают на микропроцессор 30, который по специальной программе выдает команды на блок 31 силовых ключей.
Блок 31 силовых ключей предназначен для коммутации сигналов управления соответствующего объекта 18-Р управления, например сигналов управления его двигателями мишенной установки, средствами имитации и т.д., а также для обеспечения развязки микропроцессора 30 контроллера 17-Р от сильноточных цепей объекта управления. Через блок 31 силовых ключей коммутируются ответные сигналы, поступающие от объекта 18-Р управления на управляющие выходы-входы 21-P-1. . . 21-P-L контроллера, например сигналы о поражении мишеней, о точности этого поражения, о достижении тележкой движущейся мишени крайнего положения и о других аналогичных событиях, которые могут быть зафиксированы самим объектом 18-Р управления и сведения о которых могут быть переданы в контроллер 17-Р объекта управления.
От блока 31 силовых ключей контроллера 17-Р ответные сигналы поступают по шине 37 управления на микропроцессор 30, где обрабатываются специальным программным обеспечением и через блок 32 сопряжения контроллера объекта управления выдаются на выход-вход контроллера или в приемопередатчик 34 для отправки в пульт 10 управления командного пункта 1. Доставка ответных сообщений осуществляется либо радиосигналами непосредственно через приемопередатчик 5 командного пункта 1, либо через другие контроллеры 17-i и распределительные устройства 16, с которыми связан соответствующий выход-вход 20-i-j распределительного устройства. Выбор конкретного вида связи определяет только способ доставки сообщений от пульта 10 управления к контроллерам 17-1...17-Q объектов управления и обратно.
В распределительных устройствах 16 и контроллерах 17-i, через которые проходят ответные сигналы от объекта 18-i управления, осуществляется концентрация сигналов, поступающих от контроллеров 17-j объектов управления, расположенных на мишенных рубежах 3-i-j, и передача их на пульт 10 управления командного пункта 1 для отображения на устройстве 12 отображения и документирования информации текущей мишенной обстановки.
Распределительные устройства 16, контроллеры 17-1...17-Q объектов управления и сами объекты 18-1...18-Q управления в случае обнаружения собственных неисправностей или неисправностей других устройств и/или шин питания и управления могут вырабатывать аварийные сигналы, которые также могут передаваться на пульт 10 управления командного пункта 1. Наличие какого-либо аварийного сигнала может отражаться на устройстве 12 отображения и документирования информации командного пункта 1.
Все события, происходящие в процессе тренировки, о которых передана информация в пульт 10 управления командного пункта (например, изменения состояния мишеней, передвижение мишеней, поражение мишеней, прохождение рубежа и т. д.), могут там фиксироваться.
Тренировка может быть остановлена в любой момент оператором пульта 10 управления.
Стадия оценки действий участников тренировки, документирования проведенной тренировки и подготовки отчетов для передачи руководителю тренировки.
На этой стадии имеется возможность повторно просмотреть ход проведения тренировки и события, возникавшие при ее проведении и зафиксированные пультом 10 управления. Допускается возможность просмотра тренировки в реальном или ускоренном времени. Просмотр осуществляется с помощью устройства 12 отображения и документирования информации командного пункта 1.
Руководитель тренировки имеет возможность оценить действия всех и каждого из участников этой тренировки. Программное обеспечение пульта 10 управления может восстановить отдельные фрагменты прошедшей тренировки, получить информацию о времени выполнения каждым участникам любого упражнения, ознакомиться с рекомендациями, выдаваемыми автоматически на основе требований Курса стрельб.
Оператор пульта 10 управления имеет возможность просмотреть и задокументировать результаты проведенной тренировки по специальным формам, в которых отражаются списки участников (по подразделениям) и полученные ими оценки, а также оценки, полученные подразделениями в целом. Результаты всех тренировок помещаются в архив результатов и могут впоследствии быть просмотрены и изучены для проведения сравнительного анализа динамики результатов в серии последовательных тренировок одного и того же подразделения или динамики результатов серий различных тренировок при смене личного состава для определения изменения общего уровня подготовки личного состава. По первичным материалам могут готовиться различные статистические выборки и отчеты.
Стадия передачи обобщенных итогов проведенных тренировок в учебный центр.
На этой стадии осуществляется передача обобщенной информации в учебный центр для последующего анализа и использования в совершенствовании учебного процесса. Передача может производиться либо с помощью приемопередатчика 5 командного пункта 1, если имеется радиосвязь с учебным центром, либо с помощью копирования информации на бумагу или гибкие магнитные диски ЭВМ пульта 10 управления.
Стадия ремонта и проведения регламентных работ.
На этой стадии имеется возможность проведения всех необходимых регламентных работ, а также ремонт вышедшего из строя оборудования. Его рекомендуется также проводить при значительных изменениях в конфигурации оборудования на мишенном поле 2 и при установке там значительных партий нового оборудования.
Регламентные работы могут проводиться путем запуска условной тренировки по какому-либо сценарию, в котором задействовано проверяемое оборудование (распределительные устройства 16, котроллеры 17-1... 17-Q объектов управления, сами объекты 18-1... 18-Q управления, а также шины питания и управления). По поведению оборудования и поступающим ответным сигналам устанавливается степень готовности оборудования к проведению очередных тренировок.
Для проведения автономного ремонта оборудования без задействования командного пункта 1 допускается использование устройства 4 ручного управления, первичное электрическое питание которого осуществляется при подключении блока 43 питания устройства 4 к шинам 19-i питания распределительных устройств 16 для групп объектов 18-1...18-Q управления. С помощью внутренней шины 44 питания устройства 4 ручного управления вторичное электрическое питание подается на дисплей 40, клавиатуру 41 и микропроцессор 42. Команды управления вводятся в устройство 4 с помощью клавиатуры 41, а сами эти команды, результаты их выполнения и состояние управляемых устройств и объектов 18-1... 18-Q управления отображаются на дисплее 40.
С микропроцессора 42 по дуплексной шине 9 управляющие воздействия передаются на ремонтируемое или проверяемое устройство (распределительное устройство 16, контроллер 17-Р объекта управления), а через них на ремонтируемый или проверяемый объект 18-Р управления. С помощью устройства 4 ручного управления можно выдать любую команду управления, аналогичную тем, которые могут поступать от пульта 10 управления командного пункта 1 при отработке последним какого-либо сценария.
Таким образом, в предложенных устройствах обеспечивается расширение функциональных возможностей за счет структуризации мишенного поля, в том числе размещенных в нем рубежей, обеспечения оперативного управления мишенями, организации обратной связи от мишеней и других объектов управления к командному пункту, а также получения необходимой информации о результатах тренировки и широких возможностей анализа и оценки этих результатов.
Структуризация мишенного поля и наличие ЭВМ в составе командного пункта позволяет организовывать сложные сценарии с синхронными и асинхронными групповыми упражнениями, многократно повторять нужные упражнения, формировать новые упражнения, закрепляя возникающие навыки стрельбы. Наличие радиосвязи позволяет повысить оперативность работы, ускорить процесс организации новых тренажеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ КОМАНДНОГО ПУНКТА С РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2000 |
|
RU2164040C1 |
| УСТРОЙСТВО ТЕЛЕКОНТРОЛЯ АБОНЕНТОВ | 1997 |
|
RU2114458C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ МИШЕНЬЮ | 2013 |
|
RU2527309C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ СПЕЦИАЛИСТОВ ПОДРАЗДЕЛЕНИЙ РЕАКТИВНЫХ СИСТЕМ ЗАЛПОВОГО ОГНЯ | 2013 |
|
RU2525804C1 |
| Комплексная тренажерная система для подготовки специалистов противовоздушной обороны | 2017 |
|
RU2666039C1 |
| МИШЕНЬ ИМИТАТОР ВЕРТОЛЕТА ПОЛИГОННОГО КОМПЛЕКСА ДЛЯ ИСПЫТАНИЙ БОЕВОГО СНАРЯЖЕНИЯ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2583864C1 |
| ТРЕНАЖЕР РАСЧЕТА ПОДВИЖНОГО НАЗЕМНОГО РАКЕТНОГО КОМПЛЕКСА | 2020 |
|
RU2730274C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ МИШЕНЬЮ | 2010 |
|
RU2431799C1 |
Изобретение относится к автоматике и радиотехнике. Для расширения функциональных возможностей путем структуризации мишенного поля с обеспечением оперативного управления мишенями и получения информации о результатах тренировки дистанционно управляемый полигонный тренажер для стрельбы содержит командный пункт, связанный системой двунаправленных шин управления и/или системой радиосвязи с объектами управления, размещенными на мишенном поле, которое разделено на М направлений, каждое из которых представлено в виде ряда из N рубежей объектов управления, а система питания содержит М аккумуляторных батарей и/или выполнена в виде распределенной сети шин питания. 2 с. и 9 з.п.ф-лы, 7 ил.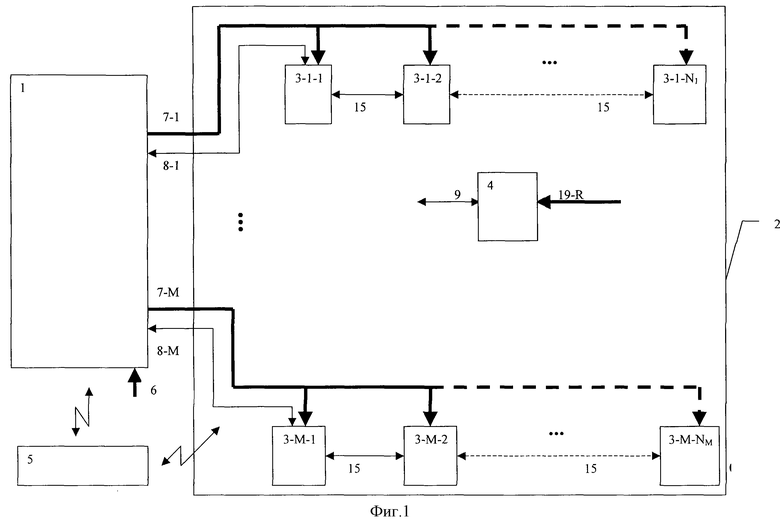
| US 5533860 А, 10.09.1996 | |||
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1993 |
|
RU2065131C1 |
| US 4296929, 27.10.1981 | |||
| УЛЬТРАЗВУКОВОЙ ТЕРАПЕВТИЧЕСКИЙ ЗАЖИМ | 2006 |
|
RU2404828C2 |

