Изобретение относится к устройствам-мишеням для использования в учебных упражнениях с боевой стрельбой и к способу управления устройствами-мишенями.
Вооруженный персонал, такой как солдаты, обычно проходит обучение, чтобы помочь им справиться с вооруженными боевыми ситуациями, с которыми они могут столкнуться во время своей службы. Такая подготовка может включать тренировочные упражнения с использованием боевых патронов, например, тренировку по стрельбе по мишеням. Такое обучение имеет решающее значение для работы и безопасности персонала в реальных жизненных ситуациях. На сегодняшний день такое обучение включает использование статических мишеней для стрельбы, всплывающих мишеней и мишеней, перемещаемых по рельсам. В некоторых случаях использовались подвижные мишени в форме манекена или чего-то подобного, установленного на подвижной платформе на колесах. Они могут напрямую управляться по радио человеком-оператором во время учений.
Известен мишенный комплекс и управление им, заключающийся в размещении на полигоне мишенных установок, имеющих модуль дистанционного управления, в размещении передатчика сигналов в оптимальных условиях передачи сигнала с возможностью связи с модулями дистанционного управления мишенных установок и с пунктом управления, мишенные установки размещают с возможностью изменения их местоположения, передают данные о географическом положении на пункт управления, отображают их расположение на пункте управления, далее отслеживают изменение положения мишенных установок с учетом изменения ситуационных условий. Мишенный комплекс состоит из набора мишенных установок, которые управляются с пункта управления, и индикатора местонахождения, находящегося у пользователя. Каждая мишенная установка состоит из щита модуля дистанционного управления, а также бронещита. Пункт управления состоит из передатчика сигналов с антенной, а также планшетного компьютера. Расширяются функциональные возможности создания стрелковых упражнений с использованием мишенного комплекса [1].
Недостатком является ограниченность в возможности составления стрелковых упражнений и отсутствие возможности перемещения мишени в любом направлении.
Известна роботизированная платформа, состоящая из корпуса, привода и устройства управления. Роботизированная платформа является транспортным средством с гусеничным движителем с приводом от бесколлекторных электродвигателей постоянного тока. Роботизированная платформа управляется по радиоканалу в режимах: ручном дистанционном, полуавтоматическом, автоматическом по программе. Роботизированная платформа также содержит навигационную и инерционные бортовые системы, закрытое бронированное моторно-трансмиссионный отделение. Внутри корпуса несущая рама обеспечивает крепление внутренних узлов и агрегатов роботизированная платформа. Ходовая часть роботизированной платформы состоит из двух гусеничных движителей. В этой роботизированной платформе имеется возможность перемещения мишени [2].
Недостатком является невозможность перемещаться по полигону без заранее запрограммированного маршрута и отсутствие возможности вносить изменения в сценарий учений в оперативном режиме, без предварительного обследования полигона на предмет наличия каких-либо препятствий.
Известно исполнительное устройство перемещения (ИУП), содержащее несущий корпус, сваренный из броневых листов, разделенный на моторное и аккумуляторное отделения, ходовую часть, оснащенную гусеничным движителем, систему автоматического управления исполнительного устройства перемещения состоящее из основного модуля, модуля радиоканала, обеспечивающего в условиях прямой радиовидимости дальность связи до 1000 м, модуля аппаратуры спутниковой навигации, модульной установки предъявления появляющейся цели, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры, и реализована с возможностью ручного управления или выполнения предварительно запрограммированной последовательности действий и движений в автоматическом режиме, передачи телеметрической информации на пульт управления полигонным оборудованием о местоположении ИУП в реальном режиме времени, скорости перемещения, напряжении аккумуляторных батарей и данных от модульной установки предъявления появляющейся цели [3].
Движения ИУП могут быть запрограммированы или под контролем инструктора, и при программировании движения могут быть рандомизированы на основе количества попаданий в цель или попаданий в конкретную область цели.
Недостатком ИУП является невозможность перемещаться по полигону без заранее запрограммированного маршрута и без предварительного обследования полигона на предмет наличия каких-либо препятствий. Так же при нахождении устройства вне зоны действия спутника затруднительно отслеживать и управлять устройством. Радиосигнал не решает эту проблему полностью.
Наиболее близким по технической сущности является целевое устройство для использования при обучении вооруженного персонала, содержащее: базовую часть, колесное шасси, содержащую средства передвижения для перемещения цели в зоне обучения, электронное оборудование для управления целью, мишень, прикрепленная к базовой части с помощью поворотного механизма, который обеспечивает независимое движение мишени относительно базовой части, при этом мишень принимает обычно вертикальное положение, а механизм поворота управляется исполнительным механизмом для перемещения мишени и вращается по отношению к основанию для принятия ряда положений вращения от вертикального положения, как в прямом, так и в обратном направлении без соответствующего перемещения базовой части.
Движения мишени выполняются автономно с использованием выходного сигнала собственного модуля инерциального измерительного модуля. Перемещение мишени выполняется на основе выходных данных системы обнаружения попадания, установленной на цели. Точно так же перемещение мишени может быть осуществлено в результате команды или воспроизвести определенный сценарий, в котором она считается пораженной, или движение может быть выполнено в результате команды дистанционного управления цели.
Точно так же цель может дистанционно управляться человеком-оператором [4].
Существенным недостатком прототипа является невозможность перемещаться по полигону без заранее запрограммированного маршрута, нет возможности автономно объезжать препятствия. Тем самым нет возможности вносить изменения в сценарий учений в оперативном режиме, без предварительного обследования полигона на предмет наличия каких-либо препятствий, без прокладывания маршрута. Таким образом, обладает низкой точностью повторения событий в реальности с событиями на полигоне. Поэтому по-прежнему существует потребность в улучшенных системах и методах обучения вооруженного персонала для обеспечения большей реалистичности тренировок и, следовательно, повышения их эффективности.
Задачей, на решение которой направлено изобретение, является повышение надежности, увеличение эффективности работы, повышении точности ориентации, а именно определение препятствий и их объезд в автономном режиме.
Для достижения этого в роботизированном мишенном комплексе для тренировки тактики боя в условиях полигона, содержащем основной блок, механический блок, аккумуляторное отделение, ходовую часть, блок питания, систему автоматического управления, состоящей из модуля аппаратуры спутниковой навигации, инерциального измерительного модуля микроконтроллеров, модуля радиоканала, датчиков температуры всех блоков, системы подъема мишени, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры, согласно изобретению, ходовая часть оснащена гусеничным движителем с резинометаллическими гусеницами, дополнительно введены лазерный дальномер, ультразвуковой датчик приближения, микрокопьютер, блок датчиков, выходы которого соединены с микрокомпьютером основного блока, а блок датчиков состоит из датчиков дождя/тумана, кроме того введен блок выносного оборудования, видеокамера, которая с лазерным дальномером и ультразвуковым датчиком приближения встроены в блок выносного оборудования и закреплены на штанге, возвышающейся над несущим корпусом.
Признаками, отличающими предложенное устройство от известного является то, что ходовая часть оснащена гусеничным движителем с резинометаллическими гусеницами, дополнительно введены лазерный дальномер, ультразвуковой датчик приближения, микрокопьютер, блок датчиков, выходы которого соединены с микрокомпьютером основного блока, а блок датчиков состоит из датчиков дождя/тумана, кроме того введен блок выносного оборудования и видеокамера, которая с лазерным дальномером и ультразвуковым датчиком приближения встроены в блок выносного оборудования и закреплены на штанге, возвышающейся над несущим корпусом.
Преимущества гусеничной платформы:
Устойчивость - более длинная база повышает устойчивость на холмистой местности;
Независимость от погодных условий - гусеничная база позволяет использовать при резком изменении погодных условий (дождь, град, наледь и т.д.);
Проходимость - гусеничная база позволяет проводить тренировки в любых широтах, от пустыни до арктической тундры, в том числе на поверхности со сложным рельефом;
Использование в зимний период - в зимний период эффективность не падает, высокая пригодность применения на территории РФ; Время использования - более широкая и длинная база платформы позволяет разместить аккумуляторы повышенной емкости, повышая время беспрерывной работы мишени на полигоне.
Лазерный дальномер предназначен для обнаружения препятствий строго в горизонтальной плоскости, а также формировании карты с объемным рельефом вертикально расположенных препятствий (Стены, дерево, холмы, столбы) с углом обзора 360 градусов. Эти данные используются для формирования возможных маршрутов и путей объезда в реальном времени, для возможности достичь конечной точки полностью автономной платформой
Лазерный дальномер предназначен для высокоточного определения расстояний, например, статических и динамических препятствий. Введение лазерного дальномера позволяет, что устройство может выполнять движения, которые не запрограммированы предварительно. То есть, если в процессе перемещения от точки А до точки Б (это запрограммированная последовательность действий) возникает препятствие, то объезд препятствия происходит в автономном режиме. Кроме того, лазерные дальномеры могут быть дополнительно установлен спереди роботизированной платформы и направлены таким образом, чтобы оценить дорожное полотно, дорожную колею непосредственно вблизи движущейся роботизированной платформы. Тем самым, осуществляется мониторинг дороги на наличие ям и глубины колеи.
Видеокамера предназначена для дистанционного управления платформой оператором.
Именно высокоточное определение препятствий и их объезд в автономном режиме главное и существенное отличие предлагаемого изобретения от прототипа.
Микрокомпьютер предназначен для обработки большого объема данных поступающих от вновь введенных датчиков. Например, вновь созданное управляющее программное обеспечение включает алгоритмы искусственного интеллекта для поиска и обхода препятствий вычисления оптимального пути из одной точки в другую в режиме реального времени с высокой точностью позиционирования устройства, которая обеспечивается алгоритмами объединения данных GPS или ГЛОНАСС и инерциального измерительного модуля (ИИМ).
Датчики дождя/тумана предназначены для получения сведений о погодных условиях на полигоне. Информация с выходов этих датчиков поступает на микрокомпьютер, далее с выхода микропьютера через микроконтроллеры на исполнительные механизмы механического блока, блока системы подъема мишени и блока выносного оборудования. ИИМ состоит из трех микроакселерометров и трех микрогироскопов и предназначены для определения ориентации транспортного средства и его направления автономно.
Для корректной и точной работы вновь введенных датчиков дополнительно введены в блок выносного оборудования зарядное устройство и кнопка «стоп».
Ультразвуковой датчик приближения дублирует лазерный дальномер, например, в плохих погодных условиях. Тем не менее, может работать и самостоятельно в случае аварийного отключения лазерного дальномера. Ультразвуковой дальномер может быть установлен на устройстве-мишени, базирующейся на самоходной платформе спереди и сзади с боков, снизу и сверху. Тем самым обеспечивается полный контроль возникающих помех вокруг роботизированного мишенного комплекса. Блок-схема предложенного роботизированного мишенного комплекса для тренировки тактики боя в условиях полигона изображена на фиг. 1 где:
1 - микрокомпьютер,
2, 3 - микроконтроллеры основного блока,
4 - котроллер управления,
5 - модуль радиосигнала.
6 - инерциальное измерительное устройство,
7 - датчик дождя/тумана,
8 - лазерный дальномер,
9 - видеокамера,
10 - первое исполнительное устройство механического блока,
11 - втрое исполнительное устройство механического блока,
12 - пульт радиоуправления,
13 - детектор попадания,
14, 15 - контроллеры блока система подъема мишени,
16 - первое исполнительное устройство блока система подъема мишени,
17 - второе исполнительное устройство блока система подъема мишени,
18, 19, 20 - датчики температуры блоков,
21 - модуля аппаратуры спутниковой навигации,
22 - энкодер первого исполнительного устройства механического блока,
23 - энкодер второго исполнительного устройства механического блока,
24 - ультразвуковой датчик приближения.
Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона, содержит основной блок, механический блок, состоящий из несущего корпуса (не показано), сваренного из броневых стальных листов (не показано) и разделенный на моторное (не показано) и аккумуляторное отделения (не показано), ходовой части (не показано), оснащенную гусеничным движителем с резинометаллическими гусеницами (не показано), блок системы подъема мишени, блок выносного оборудования, блока питания, причем в основной блок встроена система автоматического управления, состоящая из микрокомпьютера 1, датчиков температуры всех блоков 18, 19, 20, выходы которых соединены с микрокопьютером 1, микроконтроллеров 2, 3, выходы/входы которых соединены с исполнительными механизмами 10, 11 и с микрокопьютером 1. Микроконтроллер 3 соединен через котроллеры 14 и 15 с исполнительными механизмами 16, 17. Исполнительные механизмы 10, 11 снабжены энкодерами 22, 23. Выход детектора попадания 13 соединены с выходами/входами микроконтроллера 3. Выходы/входы модуля радиоканала 5 соединены с выходами/входами микроконтроллера 2. Модуль аппаратуры спутниковой навигации 21 своими выходами/входами с выходами/входами микрокомпьютера 1.. Введен блок датчиков, выходы которого соединены с микрокомпьютером 1 основного блока, а блок датчиков состоит из датчиков дождя/тумана 7. Инерциальное измерительное устройство (ИИУ) 6 выходы которого соединены с входами микрокомпьютера 1 предназначены для определения ориентации транспортного средства. Кроме того введен лазерный дальномер 8, ультразвуковой датчик приближения 24 и видеокамера 9, которые встроены в блок выносного оборудования и закреплены на штанге (не показано) возвышающейся над несущим корпусом (не показано). Пульт радиоуправления 12 соединен с модулем радиосигнала 5. Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона работает следующим образом. Устройство является автономным дистанционно-управляемым транспортным средством с гусеничным движителем, с приводами, например, от бесколлекторных электродвигателей постоянного тока. Используется в составе роботизированного модульного комплекса автономного полигонного оборудования. Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона транспортирует и предъявляет мишени в условиях полигона при обучении личного состава стрельбе по перемещающимся целям.
Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона приводится в движение двумя исполнительными устройствами 10, 11 расположенными в механическом блоке. В состав исполнительных устройств может входить: электродвигатель правый и левый с планетарными редукторами, датчиками энкодера 22, 23 по каждому каналу и тормоза. Энкодеры 22, 23 считает пройденные километры на основании подсчета количества вращений колеса. Энкодер 22, 23 - датчик, который определяет угловую скорость вращения колес, а в микрокомпьютер 1 рассчитывается пройденный километраж. Энкодер 22, 23 выходами соединен с входами микроконтроллером основного блока 2,3.
Аккумуляторные батареи аккумуляторного блока обеспечивают автономное электропитание устройства. Питание осуществляется, например, от аккумулятора повышенной емкости, обеспечивающий длительное время автономной работы.
Автономная навигация достигается за счет программной обработки данных, получаемых от нескольких типов датчиков, интегрированных в комплекс. Реализованы два варианта управления: дистанционно-оператором; передвижение в рамках сетки (схемы, маршрута) по определенным GPS-координатам модуля 21 и ИИУ 6. Система контроля движения мишенного комплекса позволяет самостоятельно принимать решения на объезд препятствий/преодоление/остановку, с учетом собственных габаритов.
Так сигнал с лазерного дальномера 8 и ультразвукового датчика приближения 24 поступает на вход микрокомпьютера 1. Где формируется команда в виде цифрового кода. С микрокомпьютера 1 сигнал поступает на микроконтроллер 2. Сформированная команда поступает на исполнительные механизмы 10, 11 механического блока. В результате происходит торможение одной из сторон привода и происходит обход препятствий. Данная способность качественно отождествляет продукт по характеру поведения с реальными объектами. Имитация выхода на позицию, передвижение по траектории от точки А до Б с переменным направлением пути внутри отрезка движения, реакция на возникновения препятствий (как пример нахождение на площадке нескольких манекенов и реакция каждого на друг друга) делают описываемый продукт важным участником тренировочного процесса.
Эффективность поражения мишени достигается посредством детектирования области попадания (плечо/корпус/голова), который фиксируется детектором попадания 13. Система детектирования основана на технологии замыкания электропроводящих слоев мишени во время сквозного пролета пули. Зональное распределение изолированных друг от друга электропроводящих слоев мишени обеспечивает регистрацию критических попаданий (голова, плечо, туловище) и позволяет качественно оценить стрелковую подготовку личного состава. Интерфейс управления настроен на действие после регистрации попадания в мишень. Сигнал, зафиксированный детектором попадания 13 поступает через микроконтроллер 3 на микрокомпьютер 1 и после опускания манекена, отправляет сообщения оператору, при этом возможна настройки выдачи звукового сигнала и остановка платформы. После этого после команды оператора сигнал поступает на контроллеры 14, 15 и далее на исполнительные механизмы блока подъема мишени 16, 17. При этом система подъема/опускания мишени может работать в автономном режиме, реагируя на попадание пули и при попадании пули информационный сигнал направляется оператору. Перемещение от точки А в точку Б, объезд статических и динамических препятствий может осуществляется посредством алгоритмов искусственного интеллекта при участии оператора с управлением по видеоканалу по данным с видеокамеры, установленной на переднем крае платформы. Дальность управления - до 1000 метров. Датчики температуры 18. 19. 20 передают сигнал на компьютер 1 для корректировки с учетом погодных условий для определения более точного позиционирования устройства. Датчик дождя/тумана 7 помогает скорректировать работу устройства в различных погодных условиях.
Модуль системы глобального позиционирования обеспечивает получение данных оператором о местонахождении платформы на полигоне с точностью до 0,02 м.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, а именно повышение надежности, увеличение эффективности работы, повышении точности ориентации, а именно определение препятствий и их объезд в автономном режиме.
Источники информации:
1. Патент РФ №2722515.
2. Патент РФ №2640264.
3. Патент РФ №2643059.
4. Патент США №10809042 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| РОБОТИЗИРОВАННЫЙ МОДУЛЬНЫЙ КОМПЛЕКС АВТОНОМНОГО ПОЛИГОННОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2667132C1 |
| ПРОТИВОТАНКОВАЯ МИНА РОБОТИЗИРОВАННАЯ | 2023 |
|
RU2823707C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |

Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона содержит основной блок, механический блок, аккумуляторное отделение, ходовую часть, оснащенную гусеничным движителем с резинометаллическими гусеницами, блок питания, систему автоматического управления. Система автоматического управления состоит из модуля аппаратуры спутниковой навигации, инерциального измерительного модуля микроконтроллеров, модуля радиоканала, датчиков температуры всех блоков. Имеется система подъема мишени, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры. Установлен лазерный дальномер, ультразвуковой датчик приближения, микрокопьютер, блок датчиков дождя/тумана. Введен блок выносного оборудования и видеокамера, которая с лазерным дальномером и ультразвуковым датчиком приближения встроены в блок выносного оборудования. Технический результат - повышение надежности, увеличение эффективности работы, повышении точности ориентации роботизированного мишенного комплекса в автономном режиме. 1 ил.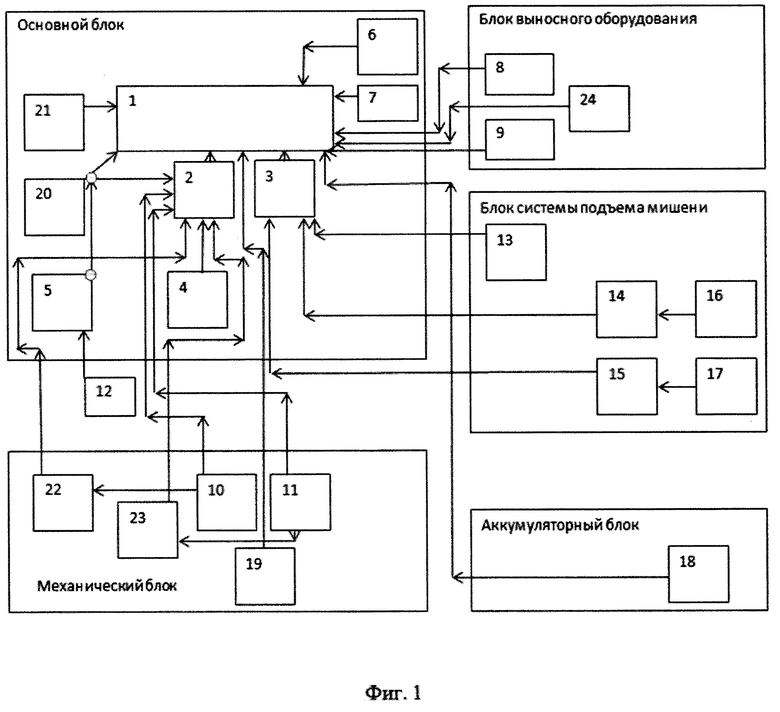
Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона, содержащий основной блок, механический блок, аккумуляторное отделение, ходовую часть, блок питания, систему автоматического управления, состоящую из модуля аппаратуры спутниковой навигации, инерциального измерительного модуля микроконтроллеров, модуля радиоканала, датчиков температуры всех блоков, системы подъема мишени, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры, отличающийся тем, что ходовая часть оснащена гусеничным движителем с резинометаллическими гусеницами, дополнительно введены лазерный дальномер, ультразвуковой датчик приближения, микрокомпьютер, блок датчиков, выходы которого соединены с микрокомпьютером основного блока, а блок датчиков состоит из датчиков дождя/тумана, кроме того введен блок выносного оборудования и видеокамера, которая с лазерным дальномером и ультразвуковым датчиком приближения встроены в блок выносного оборудования и закреплены на штанге, возвышающейся над несущим корпусом.
| РОБОТИЗИРОВАННЫЙ МОДУЛЬНЫЙ КОМПЛЕКС АВТОНОМНОГО ПОЛИГОННОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2667132C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| US 10809042 B2, 20.10.2020 | |||
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |

