Область изобретения
Изобретение относится к схеме коррекции движущегося изображения в устройстве отображения, обеспечивающем визуальное воспроизведение многотонального изображения посредством разделения времени одного кадра на множество подполей (или подкадров) и излучения этих подполей в соответствии с уровнем яркости входного видеосигнала.
Описание предшествующего уровня техники
Устройство отображения с использованием плазменного дисплея (ПД) или жидкокристаллического дисплея (ЖКД) приобрели широкую популярность благодаря своим малой толщине и малому весу. Способ возбуждения ПД полностью отличается от способа возбуждения обычной электронно-лучевой трубки (ЭЛТ), так как он основан на прямом возбуждении дискретизированным сигналом изобретения. Поэтому тон яркости, излучаемый с поверхности дисплея, зависит от количества двоичных разрядов в подлежащем обработке сигнале. ПД можно разделить на устройства, работающие на переменном токе, и устройства, работающие на постоянном токе, которые фундаментально отличаются друг от друга. Любой ПД на переменном токе обеспечивает удовлетворительные характеристики по яркости и сроку службы. Но что касается тонального воспроизведения, то на уровне испытаний получен дисплей, обеспечивающий максимум 64 тона. В последнее время был предложен 256-тональный дисплей, основанный на методе возбуждения по принципу разделения подполей адреса и воспроизведения (метод на основе подполей РАВ).
На фиг. 1 (а) и (b) показаны примерные последовательность возбуждения и сигнал возбуждения ПД, используемые в упомянутом выше методе на основе подполей РАВ для 8 разрядов и 256 тонов.
На фиг. 1(а) один кадр состоит из восьми подполей SF1, SF2, SF3, SF4, SF5, SF6, SF7 и SF8, относительные коэффициенты яркости которых составляют соответственно 1, 2, 4, 8, 16, 32, 64 и 128. Комбинация такой яркости восьми экранов позволяет получить 256-тональный дисплей.
На фиг. 1 (b) соответствующие подполя состоят из адресной длительности, которая записывает один экран обновленных данных, и поддерживающей длительности, которая определяет уровень яркости этих подполей. В адресной длительности, сначала на каждом пикселе одновременно на всех экранах формируется граничный заряд, а затем поддерживающие импульсы подаются на все экраны для отображения. Яркость подполя пропорциональна количеству поддерживающих импульсов, которые должны быть заданы для определенной яркости. Таким образом реализуется 256-тональный дисплей.
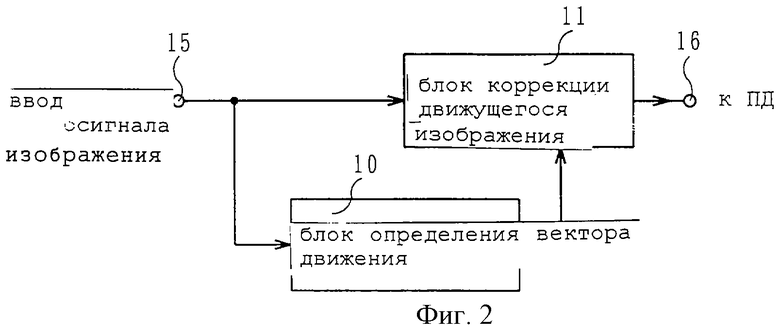
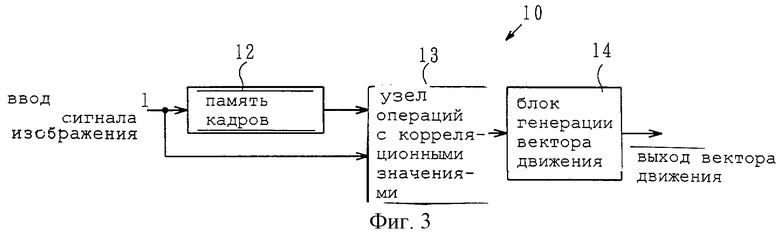
Описанный выше блок отображения, основанный на методе возбуждения по принципу разделения адреса и отображения, обычно снабжен схемой коррекции движущегося изображения, примерный вариант которой изображен на фиг.2, для уменьшения отклонений в визуальном воспроизведении движущегося изображения. Схема коррекции движущегося изображения, показанная на фиг.2, содержит блок 11 коррекции движущегося изображения и блок 10 определения вектора движения, который, в свою очередь, содержит, как показано на фиг.3, память 12 кадров, узел 13 операций с корреляционными значениями и блок 14 генерации вектора движения 14.
Компоненты блока 10 определения вектора движения функционируют следующим образом. На основе сигнала изображения, поданного на вход 15, память 12 кадров делает этот сигнал изображения предшествующим на один кадр изображение текущего кадра (именуемым в дальнейшем "изображением предыдущего кадра"). Узел 13 операций с корреляционными значениями последовательно находит корреляционные значения (дифференциальные значения) сигнала изображения для всех блоков в области обнаружения векторов движения в предыдущем кадре, относящемся к блоку, образующему объект изображения текущего кадра (блоку, состоящему из одного или нескольких пикселей, например, 2•2 пикселя). Блок 14 генерации вектора движения генерирует вектор смещения (сигнал, представляющий направление смещения и величину смещения), начальная и конечная точки которого представляют соответственно положение блока изображения предыдущего кадра, в котором корреляционное значение имеет минимальное значение, и исходную точку вектора движения (положение блока изображения предыдущего кадра в положении, соответствующем блоку изображения текущего кадра). Блок 14 генерации вектора движения генерирует этот вектор смещения как вектор движения блока, образующего объект.
В блоке 11 коррекции движущегося изображения сигнал изображения, поступивший на вход 15, корректируется на основе значения, определенного блоком 10 определения вектора движения (т.е. вектора движения). Скорректированный таким образом сигнал изображения выводится в ПД (не показан) через выход 16. Таким образом, движущееся изображение корректируется за счет коррекции положения отображения каждого подполя для пикселей в блоке объекта.
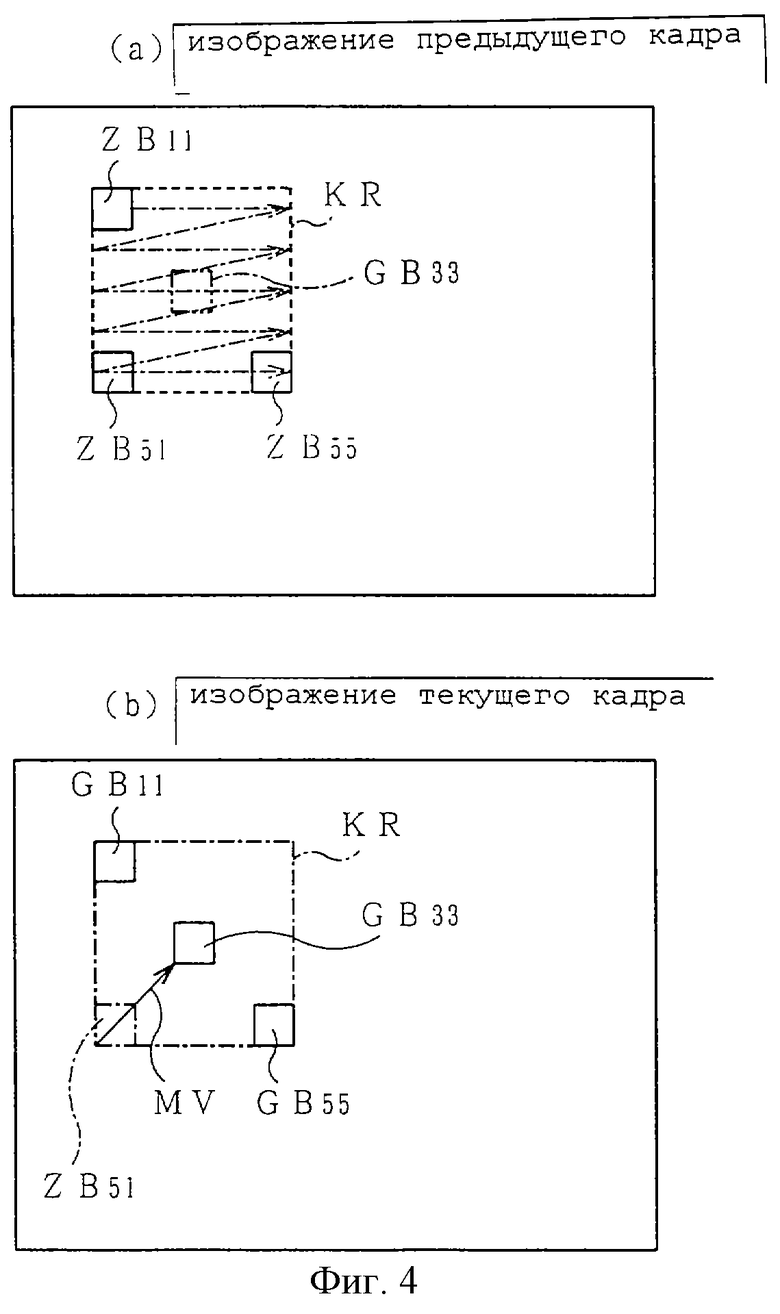
В дальнейшем будет подробно описано, как узел 13 операций с корреляционными значениями в блоке 10 определения вектора движения оперирует корреляционными значениями. В целях дискуссии допустим, что, как показано на фиг. 4(а) и 4(b), область определения KR вектора движения изображения предыдущего кадра имеет 25 блоков (5•5 блоков) и что изображение (наглядное воспроизведение), которое было в положении блока ZB51 в этой области определения KR, теперь сместилось в положение блока GB33 изображения текущего кадра. Кроме того, предполагается, что блоки ZB11-ZB65 изображения предыдущего кадра и блоки GB11-GB55 изображения текущего кадра сформированы соответственно из 2•2 пикселей (или такого же количества точек).
Если блоком объекта изображения текущего кадра является блок GB33, то узел 13 операций с корреляционными значениями будет последовательно вычислять на основании следующего выражения
S=/А1-А2/+/В1-В2/+/C1-C2/+/D1-D2/
корреляционные значения сигнала изображения для всех блоков ZB11-ZB55 в области определения KR изображения предыдущего кадра, именуемые как -данные, в этот блок GB33 в направлении, показанном чередующимися длинной и двумя короткими штриховыми линиями со стрелками на фиг.4 (а).
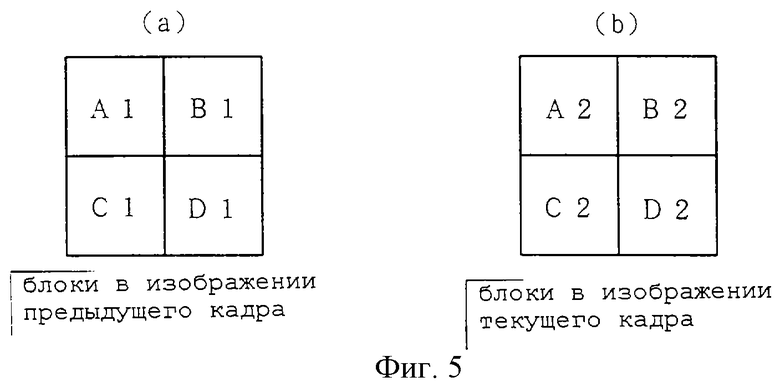
В этой формуле A1, B1, C1 и D1 представляют уровни яркости пикселей, образующих соответствующие блоки ZB11-ZB55 изображения предыдущего кадра, как показано на фиг.5(а), а А2, В2, C2 и D2 показывают уровни яркости пикселей, образующих блок GB33 объекта изображения текущего кадра, как показано на фиг.5(b).
Блок 14 генерации вектора движения осуществляет сравнение множества корреляционных значений, полученных узлом 13 операций с корреляционными значениями, друг с другом и формирует, как показано сплошными линиями на фиг. 4(b), вектор смещения MV, начальная и конечная точки которого соответственно являются положением блока ZB51 изображения предыдущего кадра, в котором корреляционное значение имеет минимальное значение, и исходной точкой вектора движения (положением блока ZB33 изображения предшествующего кадра, соответствующего блоку GB33 в изображении текущего кадра). Блок 14 генерации вектора движения затем выдает этот вектор MV как изображение движения блока объекта GB33.
Аналогичным образом можно получить векторы движения и для других блоков (например, GB11 или GB55) изображения текущего кадра, когда область KR определения вектора движения изображения предыдущего кадра охватывает 25 периферийных блоков (5•5 блоков), сконцентрированных вокруг соответствующей исходной точки (например, положения блоков ZВ11 или ZB55 изображения предыдущего кадра, соответствующие блоку GB11 или GB55).
Но поскольку положение блока, соответствующее наименьшему корреляционному значению, не всегда совпадает с начальной точкой (или конечной точкой) вектора смещения, если какой-либо разброс возникает в корреляционном значении, полученном из узла 13 операций с корреляционными значениями, например, в результате помех во входном сигнале изображения или из-за флуктуации входного сигнала изображения, то возможны случаи, когда получаются ошибочные векторы движения, отличные от истинных векторов движения, представляющих движение, воспринимаемое человеческим глазом.
Чтобы упростить описание, предположим, что область определения KR изображения предыдущего кадра составляет 9•9=81 блок и что корреляционные значения, полученные из узла 13 операций с корреляционными значениями для блоков ZB11-ZB99 в этой области определения KR, соответствуют показанным на фиг.6. Допустим также, что какое-то корреляционное значение из показанных на фиг. 6 для блока ZB65 вблизи исходной точки изображения предыдущего кадра (положение блока ZB55 на вертикальном векторе "0" и горизонтальном векторе "0") изменило свое истинное значение "0" на "10", а корреляционное значение для блока ZB82 вдали от исходной точки изменило свое истинное значение "20" на "9" в результате воздействия помех, флуктуации или т.п. В таких условиях блок 14 генерации вектора движения сравнивает корреляционные значения, показанные на фиг. 6 друг с другом, генерирует и выдает вектор движения, начальная и конечная точки которого соответственно являются положением блока ZB82, соответствующим наименьшему корреляционному значению "9", и исходной точке. В частности, как показано на фиг.6, выдается не вектор движения с горизонтальным вектором "0" и вертикальным вектором "1", с положением блока В65 как начальной точки, соответствующим истинному наименьшему корреляционному значению "0", а ошибочный вектор движения с горизонтальным вектором "-3" и вертикальным вектором "3", для которого блок В82 является начальной точкой.
Проблемой известного уровня техники является то, что коррекция движущегося изображения ухудшает качество изображения, если движущееся изображение корректируется блоком 11 коррекции движущегося изображения на основе описанного выше ошибочного вектора движения.
Допустим, что в примере, изображенном на фиг.7 (а) и (b), в десяти блоках (3•3 блока) В11-В33 обнаруженное значение вектора движения центрального блока В22 изменило значение "2" или "3" на "5" в результате помех, флуктуации и т. п. , и что определенные значения векторов движения восьми периферийных блоков В11-В33 (за исключением В22) остались "2" или "3", не подвергнутыми воздействию помех или флуктуации. В этом случае, для любых пикселей в восьми периферийных блоках В11-В33 (за исключением В22) движущееся изображение можно скорректировать на основании правильно определенных значений "2" или "3", а для любых пикселей в центральном блоке В22 коррекция движущегося изображения осуществляется на основании ошибочно определенного значения "5". Следовательно, возникает характерная для известного уровня техники проблема, состоящая в том, что ошибочная коррекция движущегося изображения вызывает ухудшение качества изображения.
Можно также предположить, что, как показано на фиг.8, в результате воздействия помех, флуктуации или т. п. не будут определены векторы движения (отсутствие движения) для трех блоков В13, В22 и В33 из девяти блоков (3•3 блоков) В11-В33, и что векторы движения будут определены (заштрихованные блоки на чертеже) для остальных шести блоков В11, В12, В21, В23, В31 и В32 без воздействия помех или флуктуации. В этом случае можно выполнить коррекцию движущегося изображения для улучшения качества изображения для пикселей в шести блоках В11, В12, В21, В23, В31 и В32, из которых были определены векторы движения, но невозможно скорректировать движущееся изображение для любых пикселей в трех блоках B13, B22 и В33, из которых не было определено ни одного вектора движения. В результате такая коррекция движущегося изображения может вызвать ухудшение качества изображения.
В основу изображения поставлена задача предотвратить ухудшение качества изображения под действием помех или флуктуации входного сигнала изображения, если движущееся изображение корректируется для уменьшения любого отклонения визуального воспроизведения движущегося изображения в устройстве отображения, воспроизводящем многотональное изображение посредством разделения во времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения.
Сущность изобретения
Согласно первому изобретению схема коррекции движущегося изображения в устройстве отображения, воспроизводящем многотональное изображение посредством разделения во времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения, отличается тем, что содержит блок определения вектора движения, определяющий вектор движения в однокадровых или межкадровых блоках (например, 2•2 пикселя) на основе входного сигнала изображения, и коррекции движущегося изображения, выдающий в устройство отображения сигнал, корректирующий положение отображения соответствующих подполей для пикселей в блоках на основе значения, определенного блоком определения вектора движения, причем указанный блок определения вектора движения содержит узел операций с корреляционными значениями, оперирующий корреляционными значениями сигнала изображения соответствующими всем блокам в области определения изображения предыдущего кадра на основе блоков, образующих объект изображения текущего кадра, блок определения наименьшего корреляционного значения, определяющий наименьшее корреляционное значение S1, имеющее наивысшую корреляцию среди множества корреляционных значений, полученных узлом операций с корреляционными значениями, умножитель, умножающий наименьшее корреляционное значение S1 на коэффициент k (k>1), блок преобразования корреляционных значений, преобразующий корреляционные значения, которые не превышают произведение k•S1, из множества корреляционных значений, полученных в узле операций с корреляционными значениями, в заданное корреляционное значение S2 (S2≤S1) и выдающий на выходе значение S2, и блок генерации вектора движения, осуществляющий определение корреляционного значения, соответствующего блоку, ближайшему в исходной точке, из заданных корреляционных значений S2 в качестве выходного сигнала блока преобразования корреляционных значений, генерацию вектора смещения, начальная и конечная точки которого являются соответственно положением блока, соответствующим определенному корреляционному значению, и исходной точкой, и выдачу этого вектора смещения в качестве вектора движения.
В целях пояснения допустим случай, когда корреляционное значение, полученное узлом операций с корреляционными значениями, подвергалось воздействию помех, флуктуации или т.п., наименьшее корреляционное значение S1 (например, 9), определенное блоком определения наименьшего корреляционного значения соответствует ошибочному блоку, находящемуся вдали от исходной точки, и истинное корреляционное значение (например, "0"), соответствующее блоку рядом с исходной точкой, изменилось на корреляционное значение S1a (например, "10"), которое больше S1. В таком случае в известном уровне техники, как показано на фиг.6, будет получен ошибочный вектор движения, начальная и конечная точки которого являются соответственно положением блока, соответствующим наименьшему корреляционному значению S1, и исходной точкой. Но при использовании первого изобретения исключено получение ошибочного вектора движения. Это достигается за счет того, что блок преобразования корреляционных значений преобразует корреляционные значения, которые не превышают произведение К•S1 (например, 1,5•S1), из корреляционных значений, полученных узлом операций с корреляционными значениями, в заданное корреляционное значение S2, не превышающее S1 (например, "0"), причем наименьшее корреляционное значение (S2), образующее объект определения, включает в себя корреляционное значение S1a до преобразования.
Блок генерации вектора движения определяет корреляционное значение, соответствующее блоку, ближайшему к исходной точке, из множества наименьших корреляционных значений (соответствующих корреляционному значению S1a до преобразования), генерирует вектор смещения, начальная и конечная точки которого являются соответственно положением блока, соответствующим определенному корреляционному значению, и исходной точкой, и выдает этот вектор смещения в качестве вектора движения. Такая конфигурация не позволяет блоку определения корреляционного значения выдать ошибочный вектор движения в результате помех, флуктуации и т.п., исключается тем самым ухудшение качества изображения при коррекции движущегося изображения в блоке коррекции движущегося изображения.
Согласно второму изобретению схема коррекции движущегося изображения в устройстве отображения, воспроизводящем многотональное изображение посредством разделения во времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения, отличается тем, что содержит блок определения вектора движения, определяющий вектор движения в однокадровых или межкадровых блоках на основе входного сигнала изображения, блок мажоритарной обработки, осуществляющий поиск наиболее многочисленных идентичных обнаруженных значений из значений, обнаруженных блоком определения вектора движения, для всех блоков в заданном диапазоне S, включая блок объекта, и блок коррекции движущегося изображения, выдающий в устройство отображения сигнал, корректирующий положения отображения соответствующих подполей для пикселей в блоке объекта на основе обнаруженного значения, полученного в блоке мажоритарной обработки.
Теперь рассмотрим случай, когда один кадр делится во времени на число n подполей SFn-SF1 для показа многотонального изображения n бит входного сигнала изображения. Блок определения вектора движения определяет направление смещения (например, к верхней части экрана) и величину смещения (5 точек или 5 пикселей на кадр) межкадровых блоков (т.е. определяет вектор движения). Блок мажоритарной обработки осуществляет поиск наиболее многочисленных идентичных обнаруженных значений среди значений, определенных с помощью блока определения вектора движения, для блоков в заданном диапазоне S. Блок коррекции движущегося изображения корректирует входной сигнал изображения на основе определенного значения, полученного в блоке мажоритарной обработки, и выдает этот скорректированный сигнал в устройство отображения. Такая конфигурация позволяет за счет мажоритарной обработки избежать получения неровного вектора движения, даже если блок определения вектора движения выдаст ошибочный вектор движения в результате помех, флуктуации или т.п., тем самым исключается ухудшение качества изображения в процессе коррекции движущегося изображения.
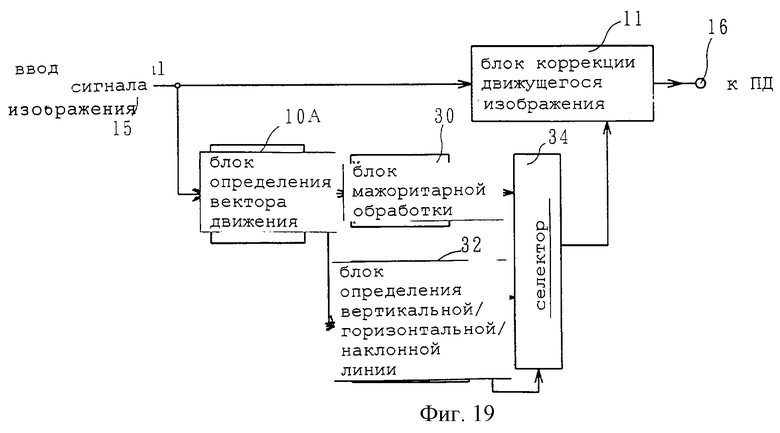
Согласно третьему изобретению схема коррекции движущегося изображения в устройстве отображения, воспроизводящем многотональное изображение посредством разделения во времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения, отличается тем, что содержит блок определения вектора движения, определяющий вектор движения в однокадровых или межкадровых блоках на основе входного сигнала изображения, блок мажоритарной обработки, осуществляющий поиск наиболее многочисленных идентичных обнаруженных значений среди значений, обнаруженных блоком определения вектора движения для всех блоков в заданном диапазоне S, включая блок объекта, блок определения вертикальной/горизонтальной/наклонной линии, определяющий, расположены ли блоки с идентичными значениями, обнаруженные блоком определения вектора движения, непрерывно вертикально, горизонтально или наклонно в заданном диапазоне S, включая блок объекта, и выдающий эти идентичные обнаруженные значения в случае такого определения, селектор, выбирающий определенные значения на выходе блока определения вертикальной/горизонтальной/наклонной линии, если у него есть какой-либо обнаруженный выход и выбирающий обнаруженные значения, полученные в блоке мажоритарной обработки, если такого обнаруженного выхода нет, и блок коррекции движущегося изображения, выдающий в устройство отображения сигнал, корректирующий положение отображения соответствующих подполей для пикселей в блоке объекта на основе обнаруженного значения, выбранного этим селектором.
Как и в случае предыдущего второго изобретения, эта третья конфигурация позволяет с помощью мажоритарной обработки исключить неровный вектор движения даже в том случае, когда блок определения вектора движения выдаст какой-либо ошибочный вектор движения в результате воздействия помех, флуктуации или т.п., тем самым исключается ухудшение качества изображения при коррекции движущегося изображения. Поскольку в третьем изобретении предусмотрено, что когда изображение с одной соответствующей вертикальной, горизонтальной или наклонной линией движется в определенном направлении, обнаруженные значения этого изображения с вертикальными, горизонтальными и наклонными линиями заменяют с помощью обнаруженного выхода блока определения вертикальной/горизонтальной/наклонной линии обнаруженные значения, полученные с помощью мажоритарной обработки, то точную коррекцию движущегося изображения можно выполнить с высокой степенью детализации в изображении.
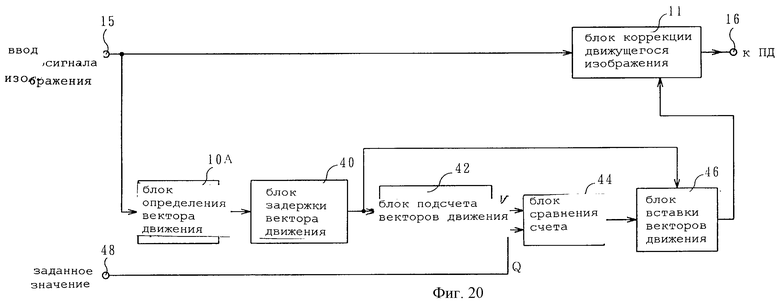
Согласно четвертому изобретению схема коррекции движущегося изображения в устройстве отображения, воспроизводящем многотональное изображение посредством разделения во времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения отличается тем, что содержит блок определения вектора движения, определяющий вектор движения в однокадровых или межкадровых блоках на основе входного сигнала изображения блок задержки вектора движения, который осуществляет поиск вектора движения каждого блока в заданном диапазоне S, состоящем из блока объекта и периферийных блоков, посредством задержки значения, обнаруженного блоком определения вектора движения, блок подсчета векторов движения, который подсчитывает количество обнаруженных блоков, имеющих векторы движения во всех блоках в заданном диапазоне S, блок сравнения счета, сравнивающий, не превывает ли счет блока подсчета векторов движения заданное значение, блок вставки вектора движения, выпадающий вектор движения на основе выхода блока задержки вектора и выхода блока сравнения счета, и блок коррекции движущегося изображения, выдающий в устройство отображения сигнал, корректирующий положение отображения каждого подполя для пикселей в блоке объекта на основе вектора движения, выданного блоком вставки вектора движения, причем блок вставки вектора движения выполнен с возможностью выдачи в качестве вектора движения блока объекта векторов движения, обнаруженных блоков, имеющих векторы движения в заданном диапазоне S, если нет вектора движения блока объекта, полученного в блоке задержки вектора движения, и если блок сравнения счета посылает сигнал сравнения, а в противном случае выдачи вектора движения блока объекта, полученного в блоке задержки вектора движения.
Если из блока задержки вектора движения не получен вектор движения блока объекта и блок сравнения счета посылает сигнал сравнения, то блок вставки вектора движения выдает в качестве вектора движения в блок коррекции движущегося изображения вектор движения обнаруженных блоков, имеющих вектор движения в заданном диапазоне S. Это значит, что когда количество обнаруженных блоков, имеющих вектор движения в заданном диапазоне S, превосходит заданное значение, вектор движения блока объекта вставляется (заменяется) как вектор движения обнаруженных блоков, имеющих векторы движения, даже в том случае, если отсутствует вектор движения блока объекта. Это позволяет скорректировать положение отображения каждого подполя для пикселей в блоке объекта на основе вектора движения, вставленного блоком вставки вектора движения, если даже помехи, флуктуации или т.п. не позволили обнаружить вектор движения, несмотря на его наличие. Благодаря такой компенсации разброса в блоке объекта и периферийных блоках можно корректировать движущееся изображение без ухудшения его качества.
Блок коррекции движущегося изображения согласно пятому, шестому и седьмому изображениям, отличается тем, что блок определения вектора движения, являющийся частью предыдущих второго, третьего и четвертого изобретений, заменен блоком определения вектора движения, одним из элементов первого изобретения, что предотвращает возможность выдачи ошибочного вектора движения из предшествующего блока определения вектора движения. В то же время последующая схема исключает введение ошибочного вектора движения в блок коррекции движущегося изображения даже в том случае, когда блок определения вектора движения может выдать ошибочный вектор движения. Эта конфигурация также позволяет с большой точностью сохранять качество изображения при коррекции движущегося изображения блоком коррекции движущегося изображения.
Краткое описание чертежей
Фиг. 1 изображает схематически метод возбуждения по принципу разделения адреса/отображения, где (а) пояснительная схема последовательности 256-тонального возбуждения, и (b) - некоторые сигналы возбуждения,
фиг.2 изображает структурную схему, иллюстрирующую схему коррекции движущегося изображения для устройства отображения в традиционном исполнении,
фиг.3 изображает другую структурную схему, иллюстрирующую блок определения вектора движения, показанный на фиг.2,
фиг. 4 иллюстрирует процедуру по фиг.3, где (а) -схема изображения предыдущего кадра, a (b) - схема изображения текущего кадра,
фиг.5 изображает примерную конфигурацию блоков для иллюстрации, как вычислять корреляционные значения, где (а) - схема, показывающая, что уровни яркости соответствующих пикселей, составляющих блоки (2•2 пикселя) изображения предыдущего кадра, представлены как A1, B1, C1 и D1, а (b) - схема, показывающая, что уровни яркости соответствующих пикселей, составляющих блоки (2•2 пикселя) изображения текущего кадра, представлены как А2, В2, С2 и D2,
фиг.6 представляет примерную иллюстрацию данных корреляционных значений, в которых имеет место некоторый разброс, вызванный помехами, флуктуацией или т. п. в корреляционных значениях, полученных из узла операций с корреляционными значениями,
фиг. 7 изображает примерную схему, показывающую случай, когда определенное значение вектора движения блока объекта В22 сильно отличается от значений векторов движения периферийных блоков В11-В33 (за исключением В22) в результате воздействия помех, флуктуации или т.п., где (а) показывает случай, когда блоки с обнаруженным значением "2" являются наиболее многочисленными среди блоков В11-В33 в заданном диапазоне S, а (b) представляет примерную схему случая, когда блоки с обнаруженными значениями "2" и "3" являются наиболее многочисленными и равными по количеству друг другу среди блоков В11-В33 в заданном диапазоне S,
фиг.8 иллюстрирует случай, в которой помехи, флуктуации или т.п. не позволили обнаружить вектор движения блока объекта (вектор движения MV22=0) из девяти блоков В11-В33 в части движущегося изображения,
фиг. 9 показывает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии с первым изобретением,
фиг. 10 показывает данные корреляционных значений до и после преобразования в блоке преобразования данных корреляционных значений, где (а) - данные 1 корреляционных значений до преобразования, a (b) - данные 2 корреляционных значений после преобразования,
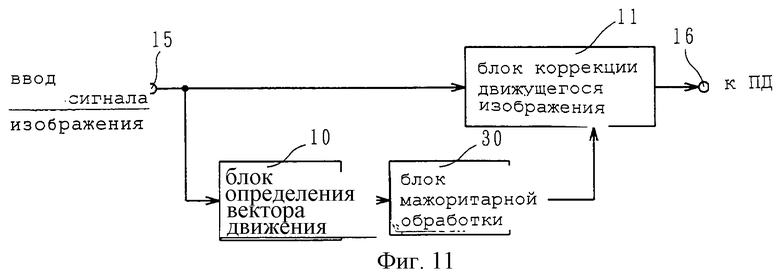
фиг.11 изображает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии со вторым изобретением,
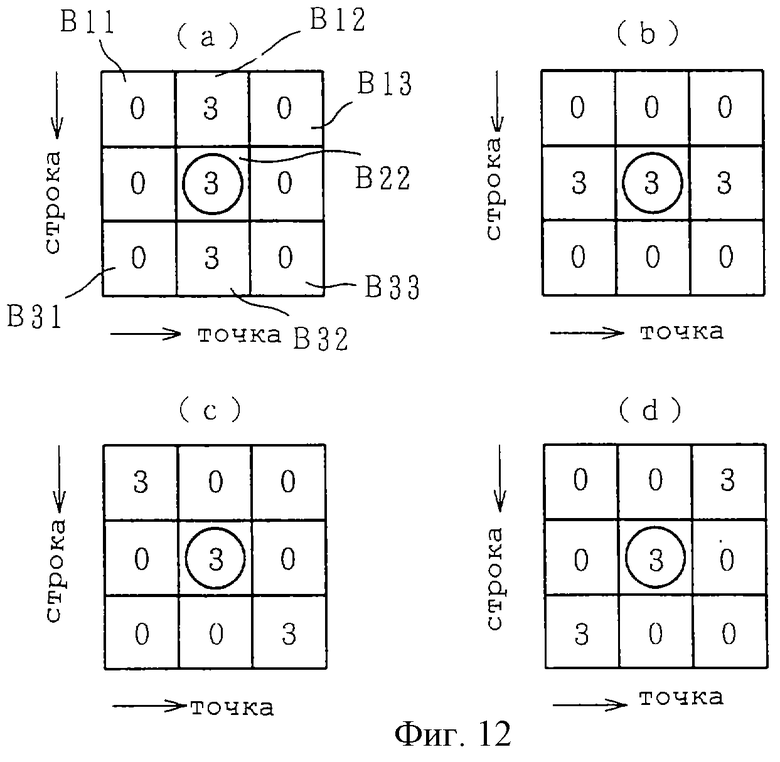
фиг. 12 иллюстрирует примерное обнаруженное значение вектора движения блоков в заданном диапазоне S, когда изображение вертикальной, горизонтальной и наклонной линий по одной линии смещается в заданном направлении, где (а) иллюстрирует обнаруженные значения для изображения вертикальной линии, (b) - для изображения горизонтальной линии, (с) - для изображения наклонной линии, опускающейся слева направо, и (d) - для изображения наклонной линии, поднимающейся слева направо,
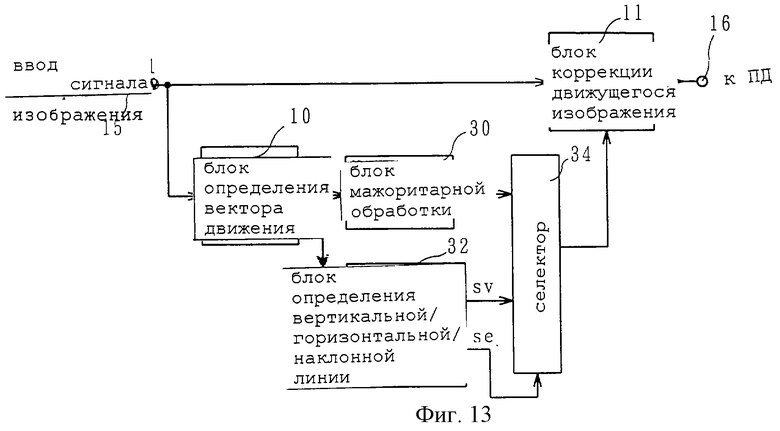
фиг.13 показывает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии с третьим изобретением,
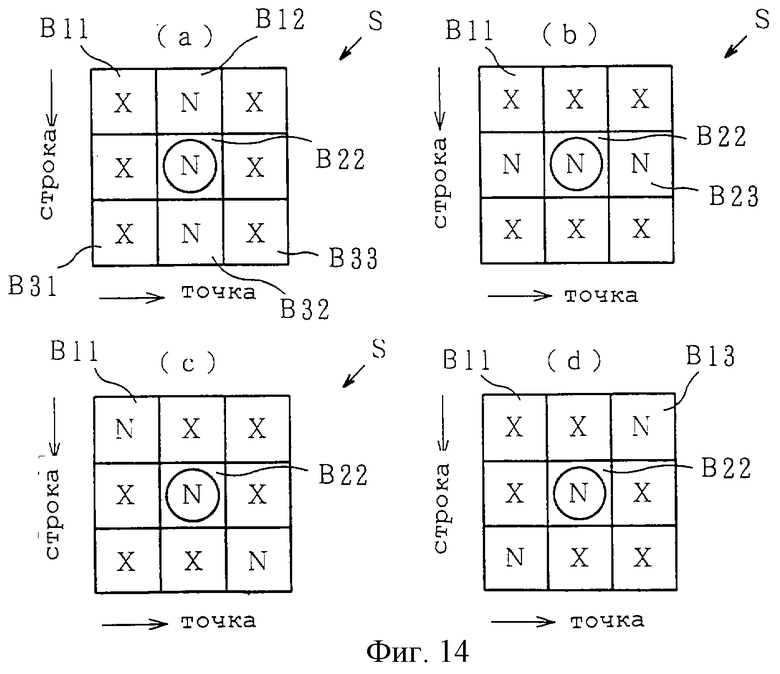
фиг. 14 иллюстрирует еще один примерный вариант обнаруженного значения вектора движения блоков в заданном диапазоне S, когда изображение вертикальной, горизонтальной и наклонной линий по одной линии смещается в заданном направлении, где (а) иллюстрирует обнаруженные значения для изображения вертикальной линии, (b) - для изображения горизонтальной линии, (с) - для изображения наклонной линии, опускающейся слева направо, и (d) - для изображения наклонной линии, поднимающейся слева направо,
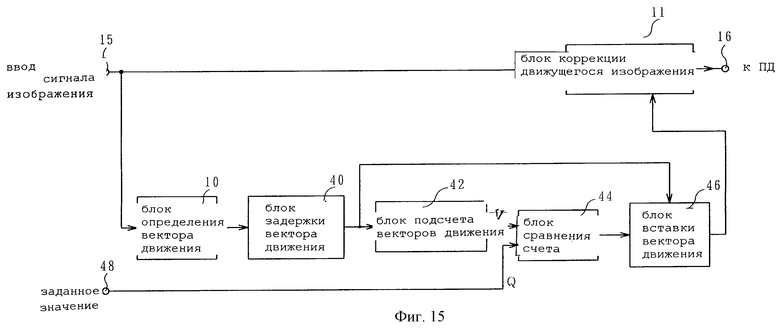
фиг. 15 показывает структурную схему, иллюстрирующую вариант четвертого изобретения,
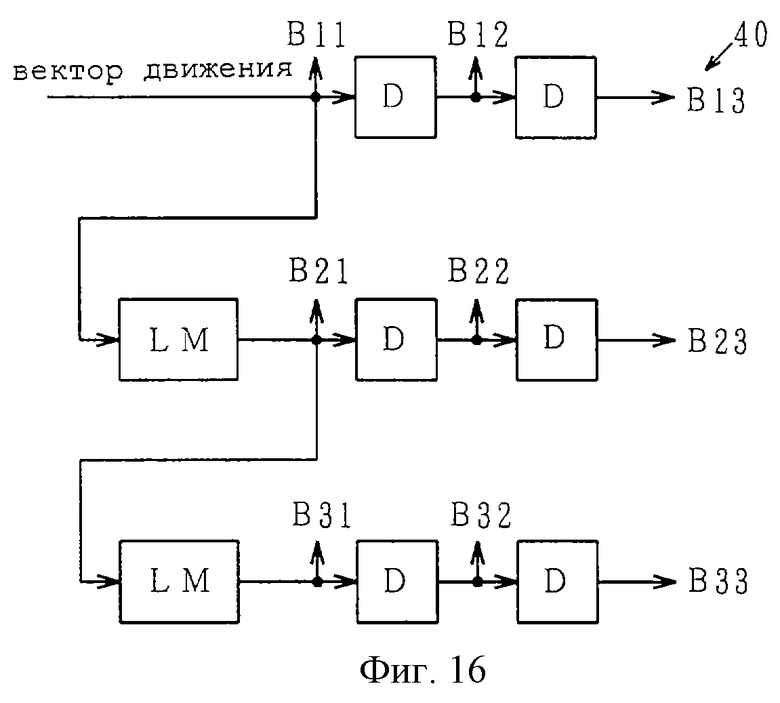
фиг.16 показывает следующую структурную схему, иллюстрирующую блок задержки вектора движения, показанный на фиг.15,
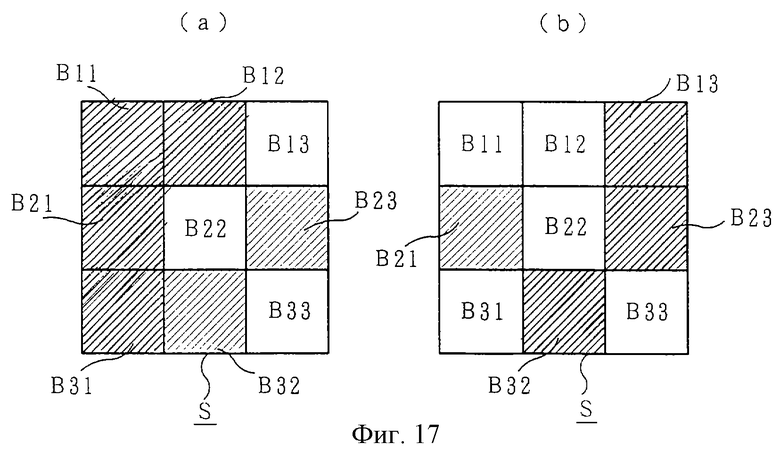
фиг. 17 показывает блоки, содержащие и не содержащие векторы движения в заданном диапазоне S (3•3 блока), где (а) иллюстрирует случай, когда количество К блоков с вектором движения равно или больше заданного значения
Q (=5) (случай вставки), а (b) - случай, когда количество К блоков с вектором движения меньше заданного значения Q (=5) (случай без вставки),
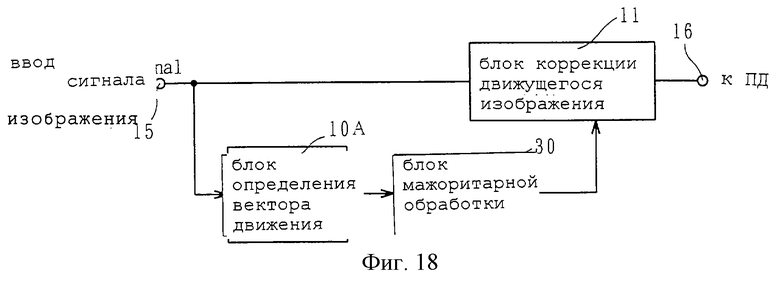
фиг. 18 показывает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии с пятым изобретением,
фиг. 19 показывает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии с шестым изобретением.
фиг. 20 показывает структурную схему, иллюстрирующую вариант схемы коррекции движущегося изображения, выполненной в соответствии с седьмым изобретением.
Предпочтительный вариант осуществления изобретения
В дальнейшем изобретение описывается более подробно со сылками на прилагаемые чертежи.
На фиг.9 показан вариант выполнения схемы коррекции движущегося изображения согласно первому изобретению, причем одинаковые или соответствующие детали обозначены такими же номерами, как на фиг.2 и 3. На фиг.9 позицией 10а обозначен блок определения вектора движения, позицией 11 - блок коррекции движущегося изображения, а блок 10А определения вектора движения содержит память 12 кадров, узел 13 операций с корреляционными значениями, блок 20 определения наименьшего корреляционного значения, умножитель 22, блок задержки 24, блок 26 преобразования корреляционных значений и блок 14 генерации вектора движения.
Память 12 кадров задерживает на один кадр сигнал изображения, поступивший на вход 15, для генерации сигнала изображения предыдущего кадра, который выводится в узел 13 операций с корреляционными значениями.
Узел 13 операций с корреляционными значениями последовательно находит и выдает корреляционные значения (дифференциальные значения) для всех блоков (например, ZB11-ZB65 на фиг.4(а)) в области определения KR вектора движения в изображении предыдущего кадра, относящемся к блоку GB, образующему объект изображения текущего кадра (например, GB33 на фиг.4(b)).
Блок 20 определения наименьшего корреляционного значения определяет наименьшее корреляционное значение S1, имеющее наивысшую корреляцию, из множества корреляционных значений, полученных в узле 13 операций с корреляционными значениями, и выдает на выходе полученное таким образом наименьшее корреляционное значение S1.
Умножитель 22 умножает на заданный коэффициент 1,5 (в случае, если коэффициент К равен 1,5) наименьшее корреляционное значение S1, полученное в блоке 20 определения наименьшего корреляционного значения, и выдает на выходе произведение 1,5•S1.
Блок задержки 24 задерживает корреляционное значение, полученное узлом 13 операций с корреляционными значениями, на время, необходимое для обработки сигнала в блоке 20 определения наименьшего корреляционного значения и в умножителе 22.
Блок 26 преобразования корреляционных значений преобразует в заданное корреляционное значение "0" (в случае, когда заданное корреляционное значение S2= 0) корреляционные значения, которые не превышают произведение 1,5•S1, из корреляционных значений, полученных узлом 13 операций с корреляционными значениями и задержанных на заданное время в блоке задержки 24.
Блок 14 генерации вектора движения сравнивает корреляционные значения на выходе блока 26 корреляционных значений друг с другом, определяет корреляционное значение, соответствующее блоку, ближайшему к исходной точке (например, положение ZB33 на фиг.4(а)) из множества заданных корреляционных значений "0", генерирует вектор смещения, начальная и конечная точки которого являются соответственно положением блока, соответствующим определенному корреляционному значению, и исходной точкой, и выдает этот вектор на выход 16 в качестве определяемого вектора движения блока изображения текущего кадра.
Блок 11 коррекции движущегося изображения корректирует сигнал изображения, поступивший на вход 15, на основе вектора движения, определенного блоком 10А определения вектора движения и выводит этот сигнал изображения в ПД через выход 16
В дальнейшем будет описана работа устройства, изображенного на фиг.9, со ссылками на фиг.10.
В целях описания допустим, что область определения KR предыдущего кадра состоит из 81 блока, сконцентрированных вокруг исходной точки (положение блока ZB55 предыдущего кадра, соответствующего блоку GB55, образующему объект определения текущего кадра), как было в случае, показанном на фиг.6.
Также допустим, что корреляционные значения, полученные в узле 13 операций с корреляционными значениями для блоков ZB11-ZB99 в области определения KR, изменились данные 1 корреляционных значений (такие же, как на фиг. 6), как показано на фиг.10(а), в результате помех, флуктуации или т.п. В частности, допустим, что корреляционное значение, соответствующее блоку ZB65 возле исходной точки изображения предыдущего кадра (положение блока ZB55) из данных 1 корреляционных значений, изменило свое истинное значение "0" на "10", а корреляционное значение, соответствующее блоку ZB82 вдали от исходной точки, изменило свое истинное значение "20" на наименьшее значение "9" и что ни одно корреляционное значение, соответствующее каким-либо другим блокам, не изменилось.
(1) Блок 20 определения наименьшего корреляционного значения определяет наименьшее корреляционное значение "9" (S1=9), имеющее самую высокую корреляцию среди данных 1 корреляционных значений, полученных в узле 13 операций с корреляционными значениями, а умножитель 22 умножает на коэффициент 1,5 (К= 1,5) наименьшее корреляционное значение "9" и выдает произведение "13,5" (k•S1=13,5).
(2) Блок 26 преобразования корреляционных значений преобразует в заданное корреляционное значение "0" (случай, когда S2=0) корреляционные значения, которые не превышают произведение "13,5", из данных 1 корреляционных значений, полученных в узле 13 операций с корреляционными значениями и задержанных на заданное время в блоке задержки 24, а затем выдает данные 2 корреляционных значений, как показано на фиг.10 (b). Это значит, что блок 26 преобразования корреляционных значений преобразует в заданное корреляционное значение "0" корреляционные значения "12", "10", "12", "12", и "9", соответствующие блокам ZB64m ZB65, 2В66, ZB75 и ZB82, корреляционные значения которых не превышают произведение "13,5", для расширения диапазона, образующего объект определения.
(3) Блок 14 генерации вектора движения сравнивает соответствующие корреляционные значения данных 2 корреляционных значений на выходе блока 26 преобразования корреляционных значений друг с другом, определяет корреляционное значение, соответствующее блоку ZB65, ближайшему к исходной точке, из множества заданных корреляционных значений "0" (коореляционных значений, соответствующих блокам ZB64, ZB65, ZB66, ZB75 и ZB82), генерирует вектор смещения, начальная и конечная точки которого являются соответственно положением блока ZB65, ближайшего к определенному коореляционному значению, и исходной точкой, и выдает этот вектор на выход 16 в качестве вектора движения. Это значит, что он выдает на выход 16 скорректированный вектор движения с горизонтальным вектором "0" и вертикальным вектором "1".
Такая конфигурация позволяет избежать выдачи ошибочного вектора движения из блока 10А определения вектора движения в результате помех, флуктуации или т. п. , тем самым исключается ухудшение качества изображения при коррекции движущегося изображения в блоке коррекции движущегося изображения.
Хотя в описанном выше варианте было принято, что заданное корреляционное значение S2, преобразованное блоком преобразования корреляционных значений, равно "0", изобретение не ограничено только этим вариантом. Заданное корреляционное значение S2 может быть любым значением, если только оно меньше наименьшего корреляционного значения S1, обнаруженного блоком определения наименьшего корреляционного значения (например, "5").
Несмотря на то, что при описании вышеуказанного варианта изобретения был взят случай, в котором коэффициент К, на который умножитель умножает наименьшее корреляционное значение S1 (например, "9"), равен 1,5, изобретение не ограничено только этим вариантом. Этот коэффициент может иметь любое значение, если оно больше 1, чтобы истинное наименьшее корреляционное значение (например, корреляционное значение "10") входило в диапазон, образующий объект определения вектора движения, несмотря на разброс в корреляционных значениях в результате помех, флуктуации или т.п.
Хотя в описанном выше варианте изобретения узел операций с корреляционными значениями выполнен с возможностью вычисления корреляционного значения, при котором множество периферийных блоков (например, 9•9=81 блок), сконцентрированных в блоке изображения предыдущего кадра (например, ZB65) в положении, соответствующем блоку, образующему объект определения (например, GB55), принимается за область определения KR вектора движения, изобретение не ограничено только этим вариантом. Например, область определения KR вектора движения может быть какой-то конкретной областью (например, 5•5=25 блоков), сконцентрированной вокруг соответствующего блока ZB33 изображения предыдущего кадра (блока, соответствующего GB33), как показано на фиг.4 (а), или какой-то областью (например, 5•5=25 блоков), включающей соответствующий блок изображения предыдущего кадра в любом положении, отличном от центра.
На фиг.11 показан вариант схемы коррекции движущегося изображения согласно второму изобретению, где аналогичные номера позиций обозначают элементы, одинаковые или соответствующие тем, которые показаны на фиг.2. На фиг.11 номером 10 обозначен блок определения вектора движения, 11 - блок схемы коррекции движущегося изображения и 30 - блок мажоритарной обработки.
Блок 30 мажоритарной обработки находит и выдает наиболее многочисленные идентичные значения, обнаруженные из значений, определенных блоком 10 определения вектора движения для блоков в заданном диапазоне S, включая блок объекта. Например, как показано на фиг.7(а), если определенное значение блока объекта В22 равно "5", определенное значение периферийных блоков В11, В21, В31 и В32 равно "2" и определенное значение блоков В13, В23 и В33 равно "3", то блоки определенного значения "2" являются самыми многочисленными (5). Это определенное значение "2" признается таковым и выдается блоком 30 мажоритарной обработки.
На основе определенного значения (например, "2") на выходе блока 30 мажоритарной обработки блок 11 коррекции движущегося изображения корректирует положения отображения соответствующих подполей (SFn-SF1) пикселей в блоке В22, поданных на вход 15, и выдает сигнал коррекции в ПД через выход 16.
Далее будет описана работа устройства, изображенного на фиг.11, со ссылками на фиг.7(а).
В целях обсуждения допустим, что, как показано на фиг.7(а), заданный диапазон S охватывает девять блоков, включая блок В22, объект обработки, и его периферийные блоки В11-В33 (за исключением В22), и что часть значений, определенных блоком 10 определения вектора движения, изменила свое истинное значение на другое значение в результате помех, флуктуации или т.п. Допустим, в частности, что определенное значение вектора движения блока объекта В22 изменило свое истинное значение (например, "2") на "5", и что периферийные блоки В11-В33 (за исключением В22) не подверглись воздействию каких-либо помех или флуктуации. Следует отметить, что определенные значения "5", "2" и "3", показанные на фиг.7(а), представляет величину смещения (например, 5, 2 и 3 точки на кадр) в определенном направлении (например, вверх). Из этого следует, что определенные значения "-5", "-2" и "-3" (не показаны) представляют величину смещения (например, 5, 2 и 3 точки на кадр) в противоположном направлении.
(1) Блок 30 мажоритарной обработки находит наиболее многочисленные идентичные значения "2" среди значений "5", "2" и "3", обнаруженных блоком 10 определения вектора движения для блоков В11-В33 в заданном диапазоне S, включающем блок В22.
(2) Блок 11 коррекции движущегося изображения выдает в ПД через выход 16 сигнал, корректирующий положения отображения подполей SFn-SF1 (всего n) пикселей в блоке объекта В22 на основании значения "2", полученного в блоке 30 мажоритарной обработки.
Следовательно, даже если обнаруженное значение блока объекта В22 отклоняется ("5") от определенных значений ("2", "3") периферийных блоков В11-В33 в результате воздействия помех, флуктуации или т.п., мажоритарная обработка может исключить выделяющееся значение ("5"), предотвращая тем самым ухудшение качества изображения при коррекции движущегося изображения.
В описанном выше варианте блок мажоритарной обработки выполнен с возможностью нахождения наиболее многочисленных идентичных определенных значений ("2" в случае, показанном на фиг.7(а)) из определенных значений блока определения вектора движения для блоков в заданном диапазоне S, но данное изобретение не ограничено только этой конфигурацией. Изобретение также применимо в любых случаях, когда блоки в заданном диапазоне S ранжируются и когда имеются многочисленные идентичные значения, определенные с помощью мажоритарной обработки, тогда определенное значение с наиболее высоким рангом может выбираться из этих многих идентичных определенных значений.
Допустим, например, что первый ранг присвоен блоку объекта В22, а второй-девятый ранги - периферийным блокам В11-В33 (за исключением В22) в последовательном порядке В11, В12, В13, В21, В23, В31, В32 и В33. Блок мажоритарной обработки в условиях такого ранжирования находит и выдает наиболее многочисленное идентичное значение "2", когда определенные значения вектора движения соответствуют показанным на фиг.7 (а), как это было в предыдущем варианте. Если же, как показано на фиг.7(b), обнаруженное значение блоков B11, B12, В13 и В23 равно "3", обнаруженное значение блоков В21, В31, В32 и В33 равно "2" и количество и тех и других блоков равно четырем (не подлежит определению по методу мажоритарной обработки), то находится и выдается значение "3" блока B11 с наивысшим рангом. Естественно, что описанное выше ранжирование приведено только для примера, и изобретение им не ограничено.
В описанном выше варианте ухудшение качества движущегося изображения при коррекции движущегося изображения предотвращается благодаря исключению любого выделяющегося значения с помощью мажоритарной обработки (включая случаи с ранжированием и без него).
Но встречаются такие исключительные случаи, когда мажоритарной обработки не достаточно для решения этой проблемы.
В случае, когда определенная величина (например, 3 точки на кадр) изображения с вертикальной линией смещается в заданном направлении (например, горизонтальном), значение, обнаруженное блоком определения векторов движения, становится равным "3" как для блока объекта, так и для периферийных блоков B12 и В32, и равным "0" для любых других периферийных блоков B11, В13, В21, В23, В31 и В33, как показано на фиг.12(а).
Следовательно, результатом мажоритарной обработки будет "0" как наиболее многочисленное определенное значение, и поэтому блок 11 коррекции движущегося изображения может счесть, что блок объекта В22 не движется. В случае, когда изображение с одной горизонтальной линией или с одной наклонной линией смещается в заданном направлении (например, 3 точки на кадр) определенные значения блока 10 определения вектора движения станут такими, как показано на фиг.12(b), (с) и (d), что также связано с определенными проблемами.
На фиг. 13 показан вариант схемы коррекции движущегося изображения согласно третьему изобретению, предназначенному для решения вышеуказанной проблемы. Аналогичные элементы обозначены такими же номерами позиций, как на фиг. 11. На фиг. 13 позицией 32 обозначен блок определения вертикальной/горизонтальной /наклонной линии, а позицией 34 - селектор.
Блок 32 определения вертикальной/горизонтальной/ наклонной линии определяет, расположены ли блоки с идентичными значениями, определенными блоком 10 определения вектора движения, непрерывно по вертикальной, горизонтальной или наклонной линии, включая блок объекта В22 в заданном интервале S, и выдает в случае определения эти идентичные определенные значения (например, определенное значение блока объекта В22).
Если существует значение "se" (например, уровень Н), обнаруженное блоком 32 определения вертикальной/горизонтальной/наклонной линии, то селектор 34 выбирает обнаруженное значение "sv" (вектор движения), полученное из блока 32 определения вертикальной/горизонтальной/наклонной линии, а если значение "se" нет (например, уровень L), блок 32 выбирает определенное значение " tv") (вектор движения), полученное из блока 30 мажоритарной обработки.
Когда по этой причине значение, определенное блоком 10 определения вектора движения, соответствует изображению вертикальной линии, имеющему конкретное значение "N" (например, N=3) для блока объекта В22 и периферийных блоков В12 и В32, и неопределенное значение "X" (например, Х=0 или 1), отличное от N, для любых других периферийных блоков В11, В13, В21, В23, В31 и В33, селектор 34 выбирает обнаруженное значение " N "(sv=N) через определенное значение "se" блока 32 определения верткиальной/ горизонтальной/наклонной линии, и блок 11 коррекции движущегося изображения выдает в ПД через выход 16 сигнал, кооректирующий положения отображение подполей SFn-SF1 (всего n) для пикселей в блоке объекта В22 на основании определенного значения "N", выбранного селектором 34.
Процедура, аналогичная предыдущему случаю с изображением вертикальной линии, применяется, когда значения, определенные блоком 10 определения вектора движения, соответствуют, как показано на фиг.14(b), (с) и (d), соответственно изображению горизонтальной линии, линии, опускающейся слева направо, и линии, поднимающейся слева направо.
Если же значения, определенные блоком 10 определения вектора движения, отличаются от значений, показанных на фиг.14 (а), (b), (с) и (d), (например, они не соответствуют изображению вертикальной, горизонтальной и наклонной линий), то блок 32 определения вертикальной/ горизонтальной/наклонной линии не выдаст на выходе "se" (например, уровень L). Следовательно, селектор 34 выдаст определенное значение "tv", выданное блоком 30 мажоритарной обработки, а блок 11 коррекции движущегося изображения скорректирует положения отображения подполей SFn-SF1 (всего n) для пикселей в блоке объекта В22 на основании определенного значения "tv", выбранного в селекторе 34.
В приведенном выше варианте описан случай диапазона, в котором блок мажоритарной обработки принимает решение по большинству, причем диапазон образует объект блока определения вертикальной/горизонтальной/наклонной линии, т. е. случай, когда заданный диапазон S охватывает 3•3=9 блоков. Но изобретение не ограничено только этим случаем. Данный вариант также применим в случае, в котором заданный диапазон S составляет 5•5=25 блоков.
На фиг. 15 показан вариант схемы коррекции движущегося изображения согласно четверому изобретению, причем одинаковые или соответствующие блоки обозначены такими же номерами позиций, как на фиг.2. На фиг.15 позицией 10 обозначен блок определения вектора движения, позицией 11 - блок коррекции движущегося изображения, позицией 40 блок задержки вектора движения, 42 - блок подсчета векторов движения, 44 - блок сравнения счета и 46 - блок вставки вектора движения.
Блок 40 задержки вектора движения задерживает значение, определенное блоком 10 определения вектора движения, для выдачи вектора движения соответствующих блоков в заданном диапазоне S (например, 3•3=9 блоков), состоящем из блока объекта и периферийных блоков.
Блок 40 задержки векторов движения объединяет, как показано на фиг.16, шесть одноточечных элементов задержки D-D- и два однострочных элемента задержки LM и LM. На основании введенного вектора движения блок 40 задержки выдает векторы движения соответствующих блоков в заданном диапазоне S (3•3=9 блоков), включая блок объекта В22 и его периферийные блоки В11-В33 (за исключением В22), как показано на фиг.17(а) и (b). Одноточечный элемент задержки D содержит D-FF (триггер), а однострочный элемент задержки LM содержит память строк.
На основании вектора движения на выходе блока 40 задержки вектора движения блок 42 подсчета векторов движения подсчитывает число обнаруженных блоков, имеющих векторы движения во всех блоках В11-В33 в заданном диапазоне S, для вывода этого счета К.
Блок 44 сравнения счета сравнивает счет К, выданный блоком 42 подсчета векторов движения, с заданным значением Q, поступившим на вход 48 заданного значения, и выдает сигнал сравнения (например, сигнал уровня Н), если K≥Q.
Блок 46 вставки вектора движения выдает в качестве вектора движения блока объекта вектор движения блока, имеющего наивысший приоритет из определенных блоков, имеющих вектор движения в заданном диапазоне S, когда блок 44 сравнения счета выдает сигнал сравнения (например, сигнал уровня Н) и на выходе блока 40 задержки вектора движения нет вектора движения блока объекта В22 (т. е. , если блок 10 определения вектора движения не обнаружил вектор движения для блока объекта В22), и выдает вектор движения блока объекта В22 на выходе блока 40 задержки вектора движения в любых случаях, отличных от описанного выше. Если, например, заданный диапазон S охватывает девять блоков, как показано на фиг. 17(а), и определенными блоками, имеющими вектор движения, являются блоки B11, B12, В21, В23, В31 и В32 (при К=Q), заштрихованные на том же чертеже, то блоки В11-В33 (за исключением В22), отличные от блока объекта В22, предварительно ранжируются (например, в последовательном порядке В21, В23, B12, В32, B11, B13, В31 и В33) и вектор движения блока объекта с наивысшим рангом (например, блок 21) из обнаруженных блоков, имеющих вектор движения (B11, B12, В21, В23, В31 и В32), выдается в качестве вектора движения блока объекта В22.
Блок 11 коррекции движущегося изображения выдает в ПД через выход 16 сигнал, корректирующий положение отображения подполей SFn-SF1 (всего n) каждого кадра пикселей в блоке объекта на основании вектора движения, выданного блоком 46 вставки вектора движения. Например, в случае, показанном на фиг.17(а), сигнал, корректирующий положения отображения подполей SFn-SF1 (всего n) каждого кадра пикселей в блоке объекта В22 выдается в ПД через выход 16 на основании вектора движения (например, вектора движения блока В21), выданного блоком 46 вставки вектора движения.
В дальнейшем будет описана работа устройства, изображенного на фиг.15, со ссылками на фиг.16 и 17.
В целях обсуждения допустим, что как показано на фиг.17(а) и (b), заданный диапазон S охватывает девять блоков, состоящих из блока объекта В22, подлежащего обработке, и его периферийных блоков В11-В33 (за исключением В22), и приоритет предварительно присвоен этим периферийным блокам в последовательном порядке В21, В23, В12, В32, В11, B13, B31 и В33, и что заданное значение Q блока 44 сравнения счета равно 5.
(1) На основе п-битного сигнала изображения, поступившего на вход 15, блок 10 определения вектора движения определяет вектор движения (направление смещения и величину смещения) однокадровых или межкадровых блоков и блок 40 задержки вектора движения выдает векторы движения MV11-MV33 соответствующих блоков В11-В33 в заданном диапазоне S на основании вектора движения на выходе блока 10 определения вектора движения. На основании вектора движения на выходе блока 40 задержки вектора движения блок 42 подсчета вектора движения подсчитывает число обнаруженных блоков, имеющих вектор движения, из всех блоков В11-В33 в заданном диапазоне S для выдачи счета К.
Если, как показано на фиг. 17 (а), обнаружено шесть блоков, имеющих вектор движения (заштрихованы), из всех девяти блоков в заданном диапазоне S, то счет К на выходе блока 42 подсчета векторов движения равен 6 (К=6). Если же обнаружено 4 блока, имеющих вектор движения, как показано на фиг.17 (b), то счет К на выходе блока 42 подсчета векторов движения будет 4 (К=4).
(2) Если, как показано на фиг.17(а), отсутствует вектор движения блока объекта В22 (MN22=0) и К=6, то К≥Q (Q=5). Следовательно, блок 44 сравнения счета выдает сигнал сравнения (например, сигнал уровня Н). При этом блок 46 вставки вектора движения выдает в качестве вектора движения блока объекта В22 вектор движения MV 21 блока 21, имеющий наиболее высокий приоритет из обнаруженных блоков, имеющих вектор движения в заданном диапазоне S. Это значит, что вектор движения MV22 (=0) блока объекта В22 вставляется как вектор движения MV21 блока В21.
(3) На основе вектора движения MV21, вставленного блоком 46 вставки вектора движения блок 11 коррекции движущегося изображения выдает в ПД через выход 16 сигнал, корректирующий положения отображения подполей SFn-SF1 (всего n) пикселей в блоке объекта В22. Следовательно, даже если собственный вектор движения блока объекта В22, подлежащий определению блоком определения вектора движения, не может быть определен из-за помех, флуктуации или т.п., положение отображения может быть скорректировано из подполей SFn-SF1 (всего n) для пикселей в блоке объекта В22 на основании вектора движения MV21, вставленного блоком 46 вставки вектора движения.
(4) Если, как показано на фиг.17(b)), отсутствует вектор движения блока объекта (MV= 0) и К=4, то К<Q (Q=5). Следовательно, блок 44 сравнения счета не выдает сигнал сравнения (например, выдается сигнал уровня L). При этом блок 46 вставки вектора движения выдает вектор движения MV22 (=0) как таковой, в частности, как вектор движения блока объекта В22. Это значит, что вектор движения MV22 (=0) блока объекта В22 не может быть введен в качестве вектора движения периферийных блоков. Следовательно, блок 11 коррекции движущегося изображения не корректирует положение отображения подполей SFn-SF1 для пикселей в блоке объекта В22.
(5) В случае наличия вектора движения блока объекта В22 (при MV22≠0) блок 46 вставки вектора движения выдает вектор движения MV22 в качестве вектора движения блока объекта В22. Это значит, что если MV22≠0, то вектор движения блока объекта В22 не вставляется как вектор движения периферийных блоков, независимо от того, выдает блок 44 сравнения счета сигнал сравнения или нет. Следовательно, на основании вектора движения MV22 (≠0) блок 11 коррекции движущегося изображения выдает в ПД через выход 16 сигнал, корректирующий положения отображения подполей SFn-SF1 (всего n) пикселей в блоке объекта В22.
В описанном выше варианте периферийные блоки в заданном диапазоне S предварительно организованы по приоритету, причем определенный вектор движения (например, MV21) блоков с наиболее высоким приоритетом из обнаруженных блоков, имеющих вектор движения в заданном диапазоне S, принимается в качестве вектора движения, который должен вставляться в случае отсутствия вектора движения блока объекта В22 (MV22=0) блоком вставки вектора движения. Но изобретение не ограничено этим вариантом.
Например, можно вставлять вектор отсутствия движения блока объекта В22 (MV22=0) по среднему значению векторов движения обнаруженных блоков, имеющих вектор движения в заданном диапазоне S. В случае, показанном на фиг.7 (а), следующая формула (1):
MVm=(MV11+MV12+MV21+MV23+MV31+MV321)/6...(1)
позволяет получить среднее значение MVm векторов движения MV11, MV12, MV21, MV23, MV31 и MV32 обнаруженных блоков В11, В12, В21, В23, В31 и В32, имеющих вектор движения в заданном диапазоне S, для введения по этому среднему значению MVm вектора отсутствия движения блока объекта (MV22=0).
Несмотря на то, что в описанном выше варианте предполагалось, что заданное значение Q блока сравнения счета равно 5, изобретение не ограничено только этим вариантом.
Кроме того, в описанном выше варианте предполагалось, что заданный диапазон S содержит блок объекта и восемь периферийных блоков (всего 9). Но изобретение не ограничено только этим вариантом, аналогичный вариант может быть предусмотрен и для случаев, в которых заданный диапазон S содержит n•m блоков (например, 5•5 блоков).
На фиг. 18 показан вариант схемы коррекции движущегося изображения согласно пятому изобретению, в котором блок 10 определения вектора движения согласно второму изобретению, показанному на фиг.11, заменен блоком 10А определения вектора движения согласно первому изобретению.
На фиг. 19 показан вариант схемы коррекции движущегося изображения согласно шестому изобретению, в котором блок 10 определения вектора движения в варианте по третьему изобретению, показанному на фиг.13, заменен блоком 10А определения вектора движения согласно первому изобретению.
На фиг. 20 показан вариант схемы коррекции движущегося изображения согласно седьмому изобретению, в котором блок 10 определения вектора движения в варианте согласно четвертому изобретению, показанному на фиг.15, заменен блоком 10А определения вектора движения в варианте согласно первому изобретению.
Схемы коорекции движущегося изображения, показанные на фиг.18, 19 и 20, предотвращают выдачу ошибочного вектора движения из предыдущего блока 10А определения вектора движения, так что ошибочный вектор движения не поступит в блок коррекции движущегося изображения в последующей схеме, даже если блок 10А определения вектора движения выдаст ошибочный вектор. Следовательно, предложенная схема позволяет исключить с еще более высокой точностью ухудшение качества изображения при коррекции движущегося изображения.
В описанном выше варианте описание строилось на предположении, что в устройстве отображения используется ПД. Но изобретение не ограничено только этим вариантом и может быть также применено в цифровом блоке визуального воспроизведения (например, в жидкокристаллическом дисплее).
Промышленная применимость
Данное изобретение может быть использовано в устройстве отображения (например, жидкокристаллическом или плазменном дисплее), воспроизводящем многотональное изображение посредством разделения времени одного кадра на множество подполей и излучения этих подполей в соответствии с уровнем яркости входного сигнала изображения для предотвращения ухудшения качества изображения в результате помех и флуктуации входного сигнала изображения при коррекции движущегося изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХЕМА ОБРАБОТКИ ВЕКТОРА ДВИЖЕНИЯ | 1998 |
|
RU2210817C2 |
| СПОСОБ КОРРЕКЦИИ ДИНАМИЧЕСКОГО ИЗОБРАЖЕНИЯ И СХЕМА КОРРЕКЦИИ ДИНАМИЧЕСКОГО ИЗОБРАЖЕНИЯ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 1998 |
|
RU2198434C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184425C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184426C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184428C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184427C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРА | 1998 |
|
RU2210873C2 |
| УСТРОЙСТВО УВЕЛИЧЕНИЯ ИЗОБРАЖЕНИЯ | 1999 |
|
RU2222056C2 |
| СХЕМА ПРЕОБРАЗОВАНИЯ РАЗВЕРТКИ | 2000 |
|
RU2257684C2 |
| СХЕМА КОРРЕКЦИИ КАЧЕСТВА ИЗОБРАЖЕНИЯ | 2000 |
|
RU2251160C2 |

Изобретение относится к устройствам отображения информации. Его применение позволяет получить технический результат в виде улучшения качества отображения движущегося изображения. Этот результат достигается благодаря тому, что схема коррекции движущегося изображения для устройства отображения содержит блок определения вектора движения, включающий в себя узел операций с корреляционными значениями, блок определения наименьшего корреляционного значения, умножитель, блок преобразования корреляционных значений и блок генерации вектора движения, в результате работы которых исключается возможность поступления ошибочного вектора движения в блок коррекции изображения, который также включен в состав схемы. 4 с. и 11 з.п.ф-лы, 20 ил.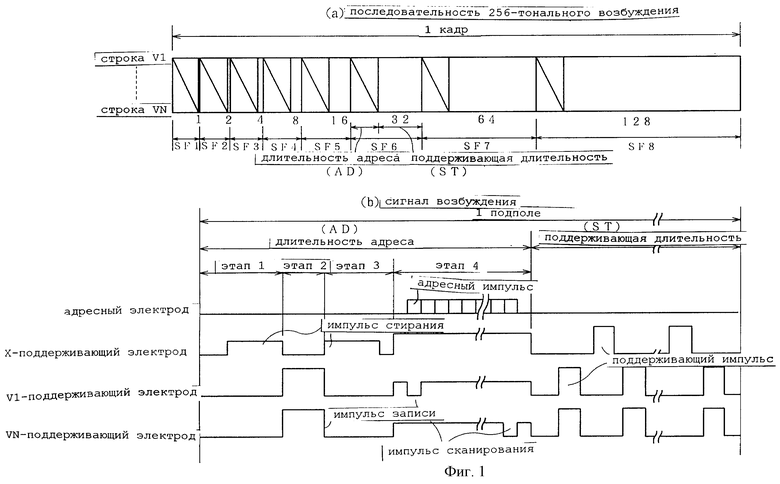
| СПОСОБ КОМПЕНСАЦИИ ИСКАЖЕНИЙ СИГНАЛА ДВИЖУЩЕГОСЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2030840C1 |
| УСТРОЙСТВО КОРРЕКЦИИ СИГНАЛА ДВИЖЕНИЯ | 1991 |
|
RU2077114C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОРАЗРЯДНОЙ ИНДИКАТОРНОЙ ПАНЕЛЬЮ ПЕРЕМЕННОГО ТОКА ДЛЯ СОЗДАНИЯ ГРАДАЦИИ СЕРНОЙ ШКАЛЫ | 1997 |
|
RU2128404C1 |
| US 5541618 А, 30.07.1996. | |||

