Область техники
Изобретение относится к схеме обработки вектора движения для обработки вектора движения при коррекции, динамического изображения в направлении временной оси. Эту схему обработки вектора движения можно использовать, например, в устройствах отображения, таких как ПИП (плазменная индикаторная панель) или ЖКУС (жидкокристаллическое устройство отображения), или в подобных устройствах, которые имеют один кадр, разделенный на множество субполей (или субкадров) на основании режима разделения времени, и позволяют отображать изображение с промежуточной градацией.
Уровень техники
В настоящее время все более популярными становятся ПИП ЖКУС, которые представляют собой тип устройства отображения с тонким и большим экраном и позволяют отображать телевизионное отображение или подобное. Обычно, при отображении изображения, имеющего промежуточную градацию, такую как у телевизионного изображения, общепринятым на практике считается разделение кадра на множество субполей, которые излучают свет в соответствии с уровнем яркости входного видеосигнала. Такой способ отображения изображения с промежуточной градацией отличается от способа ЭЛТ (электронно-лучевая трубка), использующего способ точечно-последовательной развертки. Поэтому возникает некоторое запаздывание во времени между видеосигналом, который вырабатывается с помощью телевизионной камеры, и сигналом, предназначенным для отображения на ПИП, или подобной, по отношению к синхронизации изображения в кадре (или поле), которое вызывает размытость изображения движущегося объекта или образование псевдоизображения. Поэтому согласно предшествующему уровню техники для того, чтобы решить эти проблемы, динамическое изображение корректируют за счет сглаживания величины перемещения элементов изображения, которые образуют быстро движущееся изображение на основании обнаруженного вектора движения внутри кадра видеосигнала, который будет использоваться для получения отображаемого изображения.
Однако, поскольку обработка вектора движения для коррекции динамического изображения производится на основании вектора движения, отображаемого внутри кадра, то нельзя использовать обработку в направлении временной оси, которая адаптирована к характеристике глаза человека, проявляющего свою деятельность при сопровождении движущегося объекта в динамическом изображении, таким образом создавая проблему, заключающуюся в том, что скорректированное динамическое изображение не будет согласовано с функцией глаза человека. Например, когда вектор движения, обнаруженный на базе входного видеосигнала, изменяется слишком быстро за время кадра, вследствие чего глаз человека не успевает его отслеживать, и на основании этого быстрого изменения вектора движения производится коррекция динамического изображения, происходит образование динамического изображения, не гармоничного для глаза человека.
Настоящее изобретение позволяет устранить недостатки предшествующего уровня техники, и задача настоящего изобретения заключается в создании схемы обработки вектора движения с возможностью выполнения обработки вектора движения в направлении временной оси для проведения коррекций динамического изображения, адаптированного к перемещению глаза человека.
Краткое описание изобретения
Настоящее изобретение относится к схеме обработки вектора движения для коррекции характеристики отображения динамического изображения устройства отображения, имеющей кадр, разделенный на множество субполей, при этом схема обработки вектора движения содержит каскад обнаружения разности вектора движения для обнаружения разностей среди векторов движения с числом N (где N - любое целое число не менее 2) кадров видеосигнала отображаемого изображения, каскад определения разности для определения, является или нет значение разности, которую обнаруживают с помощью каскада обнаружения разности вектора движения, меньше предварительно установленного значения L1, и средство управления выводом для вывода вектора движения соответствующего кадра, когда значение обнаруженной разности становится меньше предварительно установленного значения L1, которое определяется с помощью каскада определения разности, и для вывода вектора движения, предшествующего соответствующему кадру, который имеет обнаруженную разность меньше предварительно установленного значения L1, когда обнаруженная разность превышает предварительно установленное значение L1.
Когда изменение вектора движения между заданным кадром является маленьким, то есть, когда значение разности, обнаруженное с помощью каскада обнаружения вектора движения меньше предварительно установленного значения L1, значение обнаруженной разности становится, меньше предварительно установленного значения L1, которое определяется с помощью каскада определения разности, таким образом, вектор движения соответствующего кадра выводится из средства управления выводом. Когда изменение вектора движения между заданными кадрами является относительно большим, то есть, когда значение разности, обнаруженной с помощью каскада обнаружения разности вектора движения, превышает предварительно установленное значение L1, значение обнаруженной разности превышает предварительно установленное значение L1, которое определяется с помощью каскада определения разности, таким образом выводится вектор движения кадра, предшествующего соответствующему кадру, который имеет обнаруженную разность меньше, чем предварительно установленное значение L1. Поэтому когда изменение вектора движения является относительно маленьким, можно скорректировать динамическое изображение с помощью вектора движения соответствующего кадра. С другой стороны, когда изменение вектора движения является относительно большим, можно скорректировать динамическое изображение с помощью вектора движения, чье изменение меньше, чем у вектора движения соответствующего кадра, посредством чего можно реализовать устройство отображения динамического изображения, гармоничного с функцией глаза человека.
Кроме того, в схеме обработки вектора движения согласно настоящему изобретению каскад обнаружения разности вектора движения обнаруживает разность D1 между вектором движения настоящего кадра и вектором движения непосредственно следующего кадра и разность D2 между вектором движения настоящего кадра и непосредственно предшествующего кадра, каскад определения разности определяет, являются ли разности D1 и D2 меньше предварительно установленного значения L1, средство управления выводом выводит вектор движения настоящего кадра, когда разности D1 и D2 не превышают предварительно установленное значение L1, и выводит вектор движения кадра, предшествующий настоящему кадру, чья разность превышает предварительно установленное значение L1, когда по меньшей мере одна из разностей D1 и D2 превышает предварительно установленное значение L1. Когда схема компонуется таким способом, структуру каждого элемента можно упростить.
Кроме того, каскад определения разности дополнительно выполнен с функцией определения, превышают или нет обе разности D1 и D2 предварительно установленное значение L1, и средство управления выводом дополнительно имеет функцию вывода вектора движения, имеющего значение С (то есть, значение вектора движения равно 0), когда обе разности D1 и D2 превышают предварительно установленное значение L1. Таким образом, там, где схема компонуется таким способом, когда обе разности D1 и D2 превышают предварительно установленное значение L1, средство управления выводом не будет выводить вектор движения с нулевым значением для коррекции динамического изображения, посредством чего можно предотвратить чрезмерную коррекцию динамического изображения даже в тех случаях, когда вектор движения изменяется слишком сильно во время следования одного за другим двух или более кадров.
Кроме того, каскад определения разности дополнительно выполнен с функцией определения, превышают или нет абсолютные значения обеих разностей D1 и D2 предварительно установленное значение L1, и средство управления выводом дополнительно выполнено с функцией вывода вектора движения с нулевым значением, когда определяют, что абсолютные значения обеих разностей D1 и D2 превышают предварительно установленное значение L1 и абсолютное значение суммы разностей D1 и D2, и с функцией замедления вывода вектора движения с нулевым значением, когда абсолютное значение суммы разностей D1 и D2 меньше предварительно установленного значения L1 даже, если абсолютные значения обеих разностей D1 и D2 превышают предварительно установленное значение L1. Когда схема компонуется таким способом даже, когда абсолютные значения обеих разностей D1 и D2 превышают предварительно установленное значение L1, средство управления выводом выводит вектор движения с нулевым значением только тогда, когда абсолютное значение суммы разностей D1 и D2 превышает предварительно установленное значение L1, и замедляет вывод вектора движения с нулевым значением, когда абсолютное значение суммы разностей D1 и D2 меньше предварительно установленного значения L1, посредством чего динамическое изображение можно скорректировать с учетом направления изменения вектора движения.
Кроме того, каскад обнаружения разности вектора движения компонуется из первой памяти кадра и второй памяти кадра для вывода входных векторов движения после последовательно проявляющегося запаздывания во времени, соответствующего каждому кадру, первое арифметическое устройство с вычислением разности для вычисления разности D1 между вектором движения, который вводится в первую память кадра, и вектором движения, который выводится из первой памяти кадра, второе арифметическое устройство с вычислением разности для вычисления разности D2 между вектором движения, который выводится из первой памяти кадра, и вектором движения, который выводится из второй памяти кадра. Когда вышеупомянутое средство компонуется таким способом, каскад обнаружения разности вектора движения можно скомпоновать из двух памятей кадра и двух арифметических устройств с вычислением разности.
Кроме того, каскад обнаружения разности вектора движения содержит первую память кадра для вывода входного вектора движения после появления запаздывания во времени, соответствующего одному кадру, арифметическое устройство с вычислением разности для вычисления разности D1 между вектором движения, который вводится в эту первую память кадра, и вектором движения, который выводится из первой памяти кадра, и вторую память кадра для вывода разности D1, вычисленной с помощью арифметического устройства с вычислением разности после появления запаздывания во времени, соответствующего одному кадру. Когда компоновка происходит таким способом, каскад обнаружения разности вектора движения можно скомпоновать из двух памятей кадра и одного арифметического устройства с вычислением разности.
Краткое описание чертежей
фиг. 1 изображает блок-схему, показывающую схему обработки вектора движения, согласно варианту осуществления настоящего изобретения;
фиг.2 изображает схему для иллюстрации функции схемы (фиг.1);
фиг. 3 изображает блок-схему, которая показана в схеме обработки вектора движения, согласно другому варианту осуществления настоящего изобретения.
Подробное описание предпочтительного варианта осуществления
Ниже описывается настоящее изобретение со ссылкой на сопроводительные чертежи.
Фиг. 1 изображает вариант осуществления схемы обработки вектора движения согласно настоящему изобретению.
На фиг.1 позиция 10 обозначает каскад обнаружения разности вектора движения, содержащий первую память 11 кадра и вторую память 12 кадра, который выводит входной вектор движения после последовательного проявления запаздывания во времени, соответствующем одному кадру, первое арифметическое устройство 13 с вычислением разности для обнаружения разности D1 между вектором движения и непосредственно следующим кадром, который вводится в первую память 11 кадра, и вектором движения настоящего кадра, который выводится из первой памяти 11 кадра, и второе арифметическое устройство 14 с вычислением разности для обнаружения разности D2 между вектором движения настоящего кадра, который выводится из первой памяти 11 кадра, и вектором движения, который непосредственно предшествует кадру, который выводится из второй памяти 12 кадра.
Вектор S1 движения представляет собой направление и величину (скорость движения) блока, входящего (например, объект) в отображаемое изображение, и обнаруживается способом, который описывается ниже.
В случае, когда кадр отображаемого изображения делится на блоки элементов изображения размером 8х8 и вектор движения обнаруживается для каждого блока, корреляционные значения (например, разностные значения) видеосигнала, соответствующие для всех блоков, расположенных внутри изображения в непосредственно предшествующем кадре, определяются по отношению к блокам (элементы изображения размером 8х8), и вектор движения, стартующий из положения блока изображения в непосредственно предшествующем кадре, в котором корреляционные значения становятся минимальными и заканчиваются в начале, где значение вектора движения равно 0, определяется как вектор движения настоящего кадра.
Позиция 20 обозначает каскад определения разности, содержащий арифметические устройства 21 и 22 для вычисления абсолютного значения, предназначенные для вычисления и вывода абсолютных значений |D1| и |D2| разностей D1 и D2, сумматор для суммирования разностей D1 и D2, арифметическое устройство 24 абсолютного значения для вычисления и вывода абсолютного значения |D1+D2| из суммы (D1+D2), компаратор 31 для сравнения абсолютного значения |D1| с предварительно установленным значением L1, которое предварительно определяется с помощью схемы 25 предварительного определения значения, и вывода сигнала Н-уровня, когда |D1|≤L1 при выводе сигнала L-уровня, когда |D1|>L1 компаратор 32 для сравнения абсолютного значения |D2| с предварительно установленным значением L1 и вывода сигнала Н-уровня, когда |D1|≤L1 при выводе сигнала L-уровня, когда |D2|>L1, компаратор 33 для сравнения абсолютного значения |D1| с предварительно установленным значением L1 и вывода сигнала Н-уровня, когда |D1|>L1 при выводе сигнала L-уровня, когда |D1|≤L1, компаратор 34 для сравнения абсолютного значения |D2| с предварительно установленным значением L1 и вывода сигнала Н-уровня, когда |D2|>L1 при выводе сигнала L-уровня, когда |D2|≤L1, компаратор 35 для сравнения абсолютного значения |D1+D2| с предварительно установленным значением L1 и вывода сигнала Н-уровня, когда |D1+D2|≤L1 при выводе сигнала L-уровня, когда |D1+D2|>L1, схему НЕ для инвертирования при выводе сигнала, который выводится из компаратора 35, и схему И 41 для вывода сигнала И из сигналов, которые выводятся из компараторов 31 и 32, и схему И 42 для вывода сигнала И из сигналов, которые выводятся из компараторов 33 и 34 и схемы НЕ 36.
Позиция 50 обозначает схему защелки, которая показана в качестве примера средства управления выводом. Схема 50 защелки обрабатывает сигнал, который выходит из схемы И в виде сигнала L0 нагрузки, и выполняет загрузку для защелкивания (сохранения) вектора движения настоящего кадра, который выводится из первой памяти 11 кадра, когда сигнал L0 представляет собой сигнал Н-уровня и выводится в виде вектора S2 движения, но, когда сигнал L0 представляет собой сигнал L-уровня, схема 50 защелки не будет загружать вектор движения настоящего кадра для того, чтобы выводить предварительно защелкнутый вектор движения в виде вектора S2 движения.
Кроме того, схемой 50 защелки, которая обрабатывает выходной сигнал, поступающий из схемы И 42 в виде сигнала R-сброса, управляют с помощью сигнала L0, который выводится из схемы И 41, когда сигнал R сброса представляет собой сигнал L-уровня, и прекращает управление с помощью сигнала L0, который поступает из схемы И 41 для вывода вектора движения с нулевым значением в виде вектора S2 движения, когда сигнал R представляет собой сигнал Н-уровня.
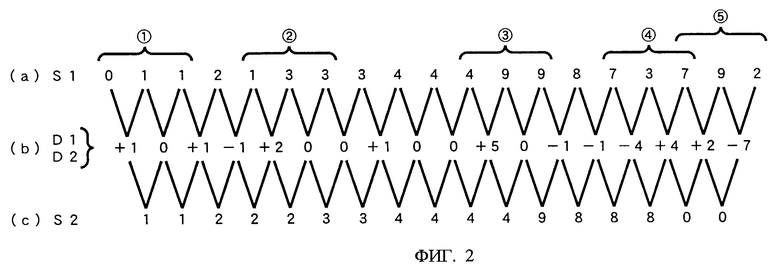
Ниже описывается функция варианта осуществления (фиг.1) со ссылкой на фиг.2. Для удобства объяснение приводится для случая, когда N=3 и L1=1.
(1) Когда абсолютные значения изменений векторов движения среди трех кадров, а именно, предшествующего кадра, настоящего кадра и последующего кадра, меньше предварительно установленного значения L1, абсолютные значения обеих разностей D1 и D2, обнаруженных с помощью каскада 10 обнаружения разности вектора движения, меньше предварительно установленного значения L1, таким образом, оба сигнала, которые выводятся из компараторов 31 и 32, и сигнал L0, который выводится из первой схемы И, представляют собой сигнал с Н-уровнем соответственно, и схема 50 защелки нагружает вектор движения настоящего кадра для защелкивания. Например, как показано на фиг.2  , когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра равны 0, 1 и 1, соответственно D1=0 D2= +1, оба из которых меньше предварительно установленного значения L1, таким образом вектор 1 движения настоящего кадра становится выходным вектором S2 движения. В этом случае сигнал R, который выводится из компараторов 33 и 34 и выводится из схемы И 42, представляет собой L-уровень, таким образом схема 50 защелки никогда не будет выполнять сброс.
, когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра равны 0, 1 и 1, соответственно D1=0 D2= +1, оба из которых меньше предварительно установленного значения L1, таким образом вектор 1 движения настоящего кадра становится выходным вектором S2 движения. В этом случае сигнал R, который выводится из компараторов 33 и 34 и выводится из схемы И 42, представляет собой L-уровень, таким образом схема 50 защелки никогда не будет выполнять сброс.
(2) Когда абсолютное значение изменения вектора движения между непосредственно предшествующим кадром и настоящим кадром или абсолютное значение изменения вектора движения между настоящим кадром и непосредственно последующим кадром превышает предварительно установленное значение L1, одно из абсолютных значений разностей D1 и D2, обнаруженных с помощью каскада 10 обнаружения разности вектора движения, становится больше предварительно установленного значения L1, и, поскольку один из сигналов, который выводится из компараторов 31 и 32, имеет L-уровень, сигнал L0, который выводится из схемы И 41, становится L-уровнем, схема 50 защелки выводит вектор движения, который предварительно был загружен для сохранения. Например, как показано на фиг. 2  или
или  когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра равны 1, 3, 2 или 4, 9 и 9, D1=0 и D2=+2 или D1=0 и D2=+5 и, поскольку D2 превышает L1 (= 1), вектор 2 или 4 движения, который предварительно загружался для сохранения с помощью схемы 50 защелки, становится выходным вектором 32 движения. В этом случае один из сигналов, который выводится из компараторов 33 и 34, имеет L-уровень, таким образом, выходной сигнал R, поступающий из схемы И 42 И также становится сигналом с L-уровнем, и схема 50 защелки никогда не будет сбрасываться.
когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра равны 1, 3, 2 или 4, 9 и 9, D1=0 и D2=+2 или D1=0 и D2=+5 и, поскольку D2 превышает L1 (= 1), вектор 2 или 4 движения, который предварительно загружался для сохранения с помощью схемы 50 защелки, становится выходным вектором 32 движения. В этом случае один из сигналов, который выводится из компараторов 33 и 34, имеет L-уровень, таким образом, выходной сигнал R, поступающий из схемы И 42 И также становится сигналом с L-уровнем, и схема 50 защелки никогда не будет сбрасываться.
(3) Когда абсолютное значение изменения вектора движения между непосредственно последующим кадром и настоящим кадром и абсолютное значение изменения вектора движения между настоящим кадром и непосредственно предшествующим кадром превышают предварительно установленное значение L1, оба абсолютных значения разностей D1 и D2, обнаруженных с помощью каскада 10 обнаружения разности вектора движения, становятся больше, чем предварительно установленное значение L1, и выходные сигналы компараторов 31 и 32 имеют L-уровень, хотя выходные сигналы компараторов 33 и 34 становятся сигналами с Н-уровнем. В этом случае выходной сигнал S2 вектора движения, который поступает из схемы 50 защелки, изменяется в зависимости от того, меньше или нет абсолютное значение суммы изменения векторов движения между непосредственно последующим кадром и изменением между настоящим кадром и непосредственно предшествующим кадром, чем L1.
(3а) Ниже рассматривается случай, когда абсолютное значение суммы изменений меньше L1.
Когда абсолютное значение суммы изменений меньше L1, сигнал, который выводится из схемы НЕ 36, имеет L-уровень, поэтому сигнал R, который выводится из схемы И 42, становится сигналом L-уровня. Поэтому схема 50 защелки не будет сбрасываться, но вектор движения, который был предварительно загружен для защелкивания, будет выводиться как вектор 2 движения. Например, как показано на фиг.2  когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра имеют значения 7, 3 и 7, соответственно D1=+4 и D2=-4, тогда как |D1+D2| = 0 или меньше L1 (=1), поэтому вектор 8 движения, который предварительно был загружен для защелкивания, становится выходным вектором S2 движения.
когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра имеют значения 7, 3 и 7, соответственно D1=+4 и D2=-4, тогда как |D1+D2| = 0 или меньше L1 (=1), поэтому вектор 8 движения, который предварительно был загружен для защелкивания, становится выходным вектором S2 движения.
(3b) Ниже рассматривается случай, когда абсолютное значение суммы изменений превышает предварительно установленное значение L1.
Когда абсолютное значение суммы изменений превышает предварительно установленное значение L1, уровень сигнала, который выводится из схемы НЕ 36, меняется на Н-уровень, поэтому уровень сигнала R, который выводится из схемы И 42, становится Н-уровнем для сброса схемы 50 защелки. Поэтому схема 50 защелки выводит вектор движения с нулевым значением в виде вектора S2 движения. Например, фиг.2  когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра имеют значения 7, 9 и 2, соответственно D1=-7 и D2=+2, тогда как |D1+D2| = 5 или превышает L1(=1), поэтому вектор движения с нулевым значением выводится как вектор S2 движения.
когда векторы движения непосредственно предшествующего кадра, настоящего кадра и непосредственно последующего кадра имеют значения 7, 9 и 2, соответственно D1=-7 и D2=+2, тогда как |D1+D2| = 5 или превышает L1(=1), поэтому вектор движения с нулевым значением выводится как вектор S2 движения.
Фиг. 3 изображает каскад обнаружения разности вектора движения согласно другому варианту осуществления изобретения (фиг.1). На этом чертеже опущено описание тех частей, которые являются общими для случая (фиг.1).
На фиг.3 позиция 60 обозначает каскад обнаружения разности вектора движения, содержащий первую память 61 кадра для вывода входного вектора 31 движения после появления запаздывания во времени, соответствующего одному кадру, арифметическое устройство 62 с вычислением разности для обнаружения разности D между вектором движения, который вводится, и вектором движения, который выводится из первой памяти 61 кадра, и вторую память 63 кадра для вывода разности D, которая выводится из арифметического устройства 62 с вычислением разности, после появления запаздывания во времени, соответствующего одному кадру, в котором вывод разности D из арифметического устройства 62 с вычислением разности выводится как разность D2 между вектором движения настоящего кадра и вектором движения непосредственно предшествующего кадра.
Описание функции, при которой каскад 20 определения изменений определяет изменение на основании разностей D1 и D2, которые выводятся из каскада 60 обнаружения разности вектора движения, и схема 50 защелки выводит соответствующий вектор S2 движения на основании сигнала определения, опущено здесь, поскольку эта функция идентична той, которая описана на фиг.1.
Вариант осуществления, описанный выше, относится к каскаду 20 обнаружения изменений, который выполнен с функцией определения, являются или нет абсолютные значения обеих разностей D1 и D2 меньше предварительно установленного значения L1, с функцией определения, превышает или нет по меньшей мере одно из абсолютных значений разностей D1 и D2 предварительно установленное значение L1, с функцией определения, является или нет абсолютное значение суммы разностей D1 и D2 меньше предварительно установленного значения L1, когда абсолютные значения обеих разностей D1 и D2 превышают предварительно установленное значение L1, и также относится к схеме 50 защелки, имеющей функцию нагрузки и вывода вектора движения настоящего кадра, когда оба абсолютных значения разностей D1 и D2 меньше предварительно установленного значения L1, с функцией вывода вектора движения, который был предварительно нагружен и защелкнут, когда по меньшей мере одна из абсолютных разностей D1 и D2 превышает предварительно установленное значение L1, и с функцией вывода вектора движения с нулевым значением, когда оба абсолютных значения разностей D1 и D2 и абсолютное значение суммы разностей D1 и D2 превышают предварительно установленное значение L1, и абсолютное значение суммы разностей D1 и D2 превышает ("предварительно установленное значение L1"), но настоящее изобретение не ограничено этим вариантом осуществления.
Например, настоящее изобретение также применяется в случае, где сумматор 23, арифметическое устройство 24 абсолютного значения, компаратор 35 и схема НЕ 36 (фиг. 1 и 2) опущены, таким образом только выходные сигналы компараторов 33 и 34 вводятся в схему И 42, и схема 50 защелки сбрасывается для вывода вектора движения с нулевым значением, когда абсолютные значения обеих разностей D1 и D2 превышают предварительно установленное значение L1.
Кроме того, настоящее изобретение применимо к случаю, где не только сумматор 23, арифметическое устройство 24 абсолютного значения, компаратор 35 и схема НЕ 36, но также компараторы 33 и 34 и схема И 42 опущены, таким образом схема 50 защелки не имеет функции сброса.
Для вышеупомянутого варианта осуществления описан случай, где N=3, но настоящее изобретение не ограничивается этим вариантом осуществления и его можно применять для случая, где N=2 или N=4 или более.
Например, настоящая заявка также применима в случае, где N=4, при этом каскад обнаружения разности вектора движения содержит три памяти кадра, три арифметических устройства со сравнением разности или три памяти кадра и одно арифметическое устройство с вычислением разности для того, чтобы обнаружить разности D1, D2 и D3 среди векторов движения 4-х кадров, и каскад определения изменений определяет, являются или нет все абсолютные значения разностей D1, D2 и D3 меньше предварительно установленного значения L1, превышает или нет по меньшей мере одно из абсолютных значений разностей D1, D2 и D3 предварительно установленное значение L1, и превышает или нет абсолютное значение суммы разностей D1, D2 и D3 предварительно установленное значение L1.
Промышленное применение
Как описано выше, настоящее изобретение используется в устройствах отображения, таких как ПИП, в котором один кадр разделяется на множество субполей на основании метода разделения во времени для отображения изображения, имеющего промежуточную градацию. Кроме того, согласно настоящему изобретению, динамическое изображение можно гармонично скорректировать с движением глаза человека посредством коррекции динамического изображения на основании вектора движения, который обрабатывают относительно своей оси времени. Поэтому динамическое изображение можно отобразить гармонично с глазами зрителя динамического изображения, улучшив таким образом характеристику отображения устройства отображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СХЕМА ВЫДЕЛЕНИЯ КОНТУРА | 2000 |
|
RU2256297C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРА | 1998 |
|
RU2210873C2 |
| СХЕМА КОРРЕКЦИИ ДВИЖУЩЕГОСЯ ИЗОБРАЖЕНИЯ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 1998 |
|
RU2199155C2 |
| СПОСОБ КОРРЕКЦИИ ДИНАМИЧЕСКОГО ИЗОБРАЖЕНИЯ И СХЕМА КОРРЕКЦИИ ДИНАМИЧЕСКОГО ИЗОБРАЖЕНИЯ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 1998 |
|
RU2198434C2 |
| СХЕМА ПРЕОБРАЗОВАНИЯ РАЗВЕРТКИ | 2000 |
|
RU2257684C2 |
| УСТРОЙСТВО УВЕЛИЧЕНИЯ ИЗОБРАЖЕНИЯ | 1999 |
|
RU2222056C2 |
| ДВУХКОНТУРНАЯ СХЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ (ФАПЧ) И СХЕМА ДЕМОДУЛЯЦИИ СИГНАЛА ЦВЕТНОСТИ, ИСПОЛЬЗУЮЩАЯ ДВУХКОНТУРНУЮ СХЕМУ ФАПЧ | 1998 |
|
RU2216124C2 |
| СХЕМА КОРРЕКЦИИ КАЧЕСТВА ИЗОБРАЖЕНИЯ | 2000 |
|
RU2251160C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184426C2 |
| СХЕМА ПОДЧЕРКИВАНИЯ КОНТУРОВ | 1997 |
|
RU2184425C2 |

Изобретение относится к устройствам отображения графической информации, в которых один кадр разделяется на множество субкадров на основании метода разделения во времени. Его применение позволяет получить технический результат в виде улучшения качества отображения движущегося изображения за счет согласования движений глаза и изображения. Этот результат достигается благодаря тому, что схема содержит каскад обнаружения разности вектора движения, каскад определения разности для определения, является или нет значение, обнаруженное с помощью каскада обнаружения разности вектора движения, меньше предварительно установленного значения L1, и средство управления выводом для вывода вектора движения соответствующего кадра, когда обнаруженная разность вектора движения меньше предварительно установленного значения L1. 5 з.п. ф-лы, 3 ил.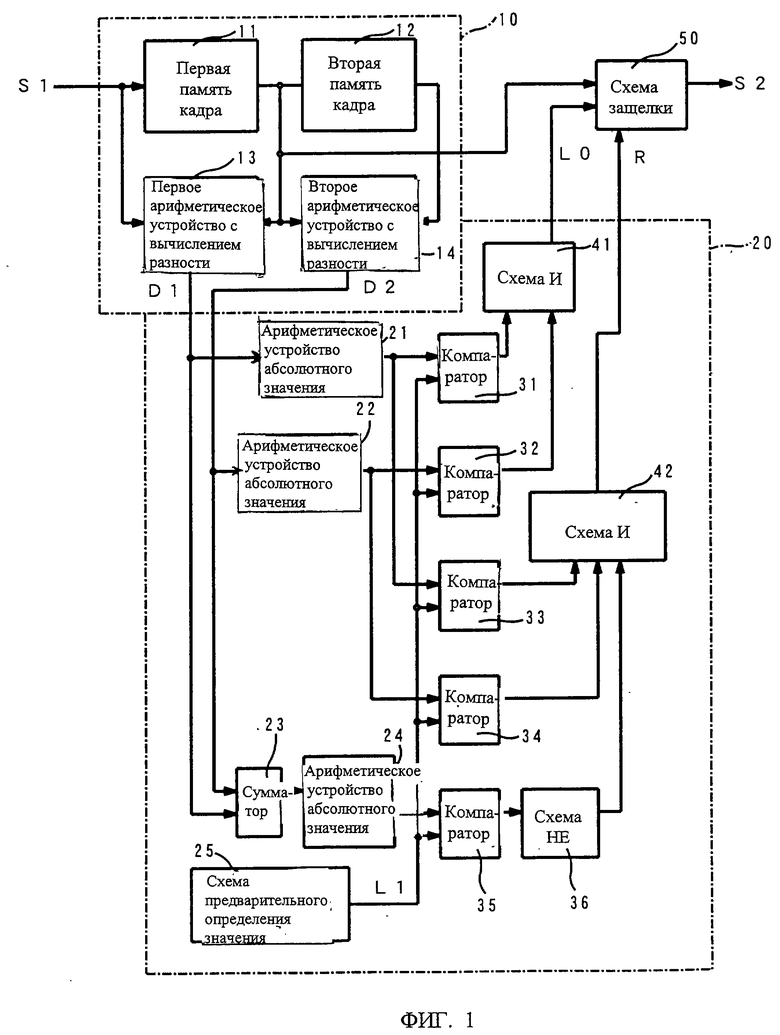
| СПОСОБ КОМПЕНСАЦИИ ИСКАЖЕНИЙ СИГНАЛА ДВИЖУЩЕГОСЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2030840C1 |
| УСТРОЙСТВО КОРРЕКЦИИ СИГНАЛА ДВИЖЕНИЯ | 1991 |
|
RU2077114C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОРАЗРЯДНОЙ ИНДИКАТОРНОЙ ПАНЕЛЬЮ ПЕРЕМЕННОГО ТОКА ДЛЯ СОЗДАНИЯ ГРАДАЦИИ СЕРНОЙ ШКАЛЫ | 1997 |
|
RU2128404C1 |
| US 5541618 А, 30.07.1996 | |||
| Ножницы для обрезки концов полос | 1975 |
|
SU549275A1 |

