Изобретение относится к медицине, а именно к офтальмологии, и предназначено для исследования бинокулярного зрения, диагностики нарушений стереоскопического зрения и определения порога стереоскопического зрения.
Целью изобретения является повышение точности определения порога стереоскопического зрения.
Известен способ определения порога стереоскопического зрения [1], основанный на фиксации момента появления стереоэффекта в процессе наблюдения стереопар в поляризованном свете через поляроиды.
Способ имеет нерешенный вопрос, именно наблюдение стереопар, а не трехмерных изображений. Разделение полей зрения осуществляется за счет поляроидов, что не позволяет наблюдать тесты в обстановке, приближенной к реальной, и приводит к снижению точности.
Известен также способ для тренировки бинокулярного зрения [2], когда пациент, фокусируя глаза на подвижном верхнем стержне и одновременно выбирая позицию головы таким образом, чтобы стержни казались расположенными в одной плоскости, старается визуально совместить подвижный стержень с одним из неподвижных. Устройство для способа состоит из корпуса с объемной сценой и двумя отверстиями для наблюдения. В качестве объекта для наблюдения используются три стержня, два из которых неподвижны и крепятся вертикально на нижнем столике. Линия, соединяющая концы стержней, перпендикулярна стенке корпуса с отверстиями для наблюдения. Третий (подвижный) стержень крепится на верхней стенке корпуса над двумя нижними. Данный способ не позволяет определять порог стереоскопического зрения.
Известен способ для тестирования стереоскопического зрения [3], в котором испытуемый может перемещать два крайних стержня, наблюдая за их положением через горизонтальное окно, и пытается совместить их по дальности с неподвижным стержнем. Результаты тестирования фиксируются. Техническое средство для способа имеет измерительно-записывающий узел и панель управления. В качестве тестового объекта используются три вертикальных стержня, каждый из которых может перемещаться по одной их трех параллельных горизонтальных дорожек. Дорожки располагаются между наблюдательным окном и задней стенкой.
Нерешенными вопросами данного способа являются: 1) низкая точность определения порога стереоскопического зрения, связанная с тем, что точность напрямую зависит от диаметра стержней, на которых отсутствуют какие-либо маркеры; 2) невозможность использования других тестовых объектов.
Наиболее близким по техническому решению является способ, представленный в [3].
В известных способах тестирования бинокулярных функций зрительного анализатора (как и в способе, взятом за прототип) совмещение маркера и опорной точки никогда не предлагалось, потому что щелепалочковые приборы не позволяют в принципе осуществить такую операцию. Даже если маркер нанесен на палочку, опорная точка могла располагаться лишь в одной плоскости с маркером, но отнюдь не в одной физической точке. Принципиальная невозможность совмещения тестовых фигур по координатам x и y приводит к дополнительной погрешности в определении пациентом расстояния между тестовыми фигурами по координате z (по глубине), которое и определяет порог стереоскопического зрения. В предлагаемом способе эта дополнительная погрешность исключается. В используемой лазерной системе трехмерные изображения генерируются (а не существуют реально) под управлением компьютера в трехмерном пространстве, поэтому эти изображения маркера и опорной точки могут накладываться друг на друга и никаких тактильных ощущений при этом не возникает у пациента. В предлагаемом способе с помощью устройства формирования трехмерных изображений координаты маркера и опорной точки известны с точностью, которая как минимум в 4 раза превосходит точность всех известных способов. Поэтому исключается погрешность в определении разности координат маркера и опорной точки.
Поставленная задача - повышение точности определения порога стереоскопического зрения - достигается в предлагаемом способе за счет формирования объемных тестовых изображений в виде разнесенных тестовых изображений с опорными точками и подвижными маркерами. Изображения опорных точек и маркеров формируют с протяженностью по глубине пространства меньшей, чем порог стереоскопического зрения. Эти изображения получают при помощи синтезирующей лазерной системы, состоящей из лазера, трехмерного экрана, отклоняющей системы, средства позиционирования и компьютера. При использовании способа голову пациента фиксируют по отношению к экрану, предъявляют ему тестовые изображения. Затем пациент с помощью средства позиционирования управляет перемещением подвижного маркера до его визуального совмещения с опорной точкой, после чего определяют координаты маркера и опорной точки. Остроту стереоскопического зрения зрительного анализатора определяют по величине разницы глубинных координат маркера и опорной точки и расстоянию от глаз пациента до опорной точки. Если параллельно плоскости подвижного матового стекла мы размещаем координатные оси x, y, то глубинной координатой будет координата z декартовой системы координат. Под остротой стереоскопического (глубинного) зрения понимают наименьшее расстояние по глубине, выраженное, например, в миллиметрах, между двумя объектами, при котором еще получают правильные ответы пациента относительно взаиморасположения двух объектов (например, палочек в щелепалочковом приборе Беста). Чаще всего остроту стереоскопического (глубинного) зрения выражают углом диспарации (бинокулярный параллакс) n = β1-β. Используемые обозначения иллюстрируются фиг.1. При неочень большой диспарации этот угол легко определяется по формуле:
где n выражен в угловых секундах в данной формуле или может быть переведен в радианы, а - межзрачковое расстояние, Δz - измеренная разница глубинных координат, d - расстояние, с которого производилось исследование.
Кроме того, предусмотрено, что процессы тестирования зрительного анализатора, задания тестовых изображений, определения величины несовпадения координат и остроты стереоскопического зрения, а также данных для коррекции определяют программным заданием вручную, с помощью гибридной интегральной схемы или компьютера. Точность определения порога стереоскопического зрения повышается за счет малой протяженности по глубине пространства изображений маркера и опорной точки.
В предложенном решении новыми признаками по отношению к известным способам аналогичного назначения являются все отличительные признаки в соответствии с формулой изобретения, кроме одного признака в общем виде - проведение анализа пациента по тестовому изображению.
Предложенное решение позволяет проводить тестирование бинокулярного зрительного анализатора с повышенной точностью в условиях, более близких к естественным.
Предложенный способ иллюстрируется следующими графическими материалами.
Фиг. 1 - приведена иллюстрация к определению угла диспарации и направлений координатных осей.
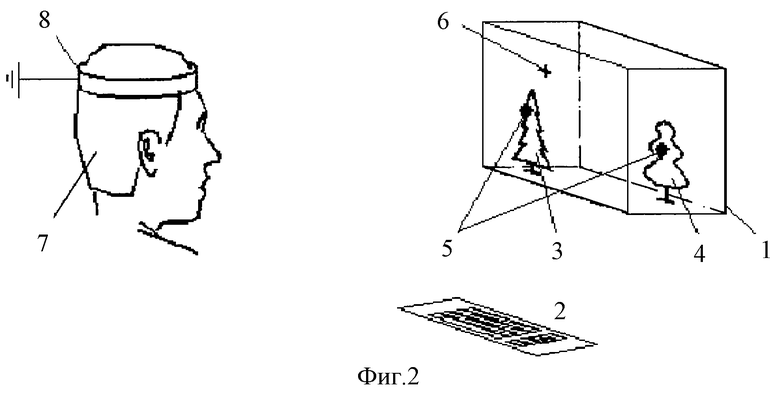
Фиг. 2 - приведена функциональная схема определения порога стереоскопического зрения и тренировки зрительного анализатора.
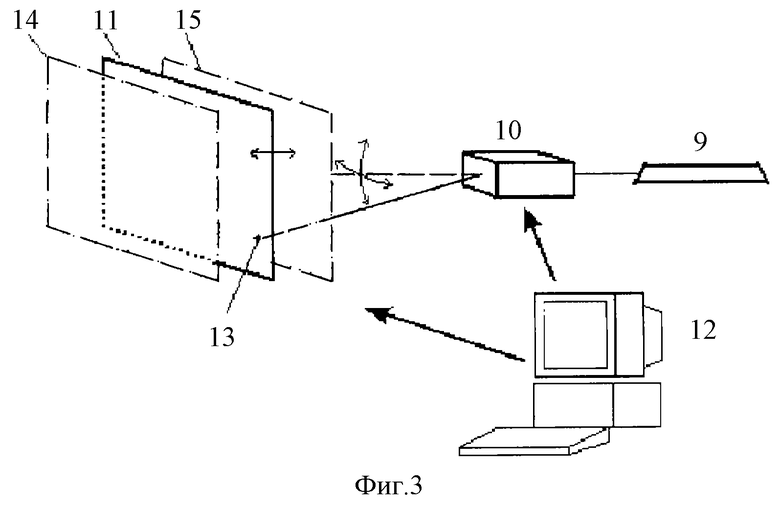
Фиг.3 - приведена структурная схема устройства, реализующего способ.
Сущность предлагаемого способа состоит в следующем (фиг.2).
С помощью синтезирующей лазерной системы отображения информации с трехмерным экраном 1 и средством позиционирования 2 формируют объемные тестовые изображения в виде разнесенных графических фигур 3, 4 с опорными точками 5. Формируют также подвижный управляемый маркер 6. Опорные точки явно обозначены на фигурах и известны пациенту. Голову пациента 7 фиксируют по отношению к экрану при помощи фиксатора 8. Пациенту предъявляют тестовые изображения 3, 4, а он с помощью средства позиционирования управляет перемещением маркера 6 до его визуального совмещения с одной из опорных точек. Координаты маркера определяют, например, посредством компьютера, при этом разница координат (по глубине относительно зрительного анализатора) маркера и соответствующей опорной точки и расстояние от зрительного анализатора до опорной точки определяют остроту стереоскопического зрения.
В качестве лазерного устройства отображения информации по способу предложено использовать известное средство [4] формирования объемных изображений (фиг.3).
Эта синтезирующая лазерная система состоит из лазера 9, отклоняющей системы 10, матового электромеханического экрана 11 и управляющего компьютера 12. Точка 13 экрана, на которую падает лазерный луч, становится видимой в результате рассеяния луча на поверхности экрана. Отклоняющая система 10 способна отклонять лазерный луч по двум координатам (по вертикали и по горизонтали), а электромеханический экран 11 совершает возвратно-поступательное движение по третьей координате. На фиг.3 показаны два крайних положения экрана 14, 15, между которыми совершается возвратно-поступательное движение. Пространственное положение точки 13, на которую упал лазерный луч, определяется текущими углами отклонения луча системой 10 и текущим положением экрана 11. Движение экрана 11, отклонение луча и включение/выключение луча синхронизованы между собой. При достаточно быстром отклонении луча и быстром перемещении экрана видимые точки на поверхности экрана не воспринимаются наблюдателем раздельно, а наоборот, за счет зрительной памяти у наблюдателя создается единый пространственный образ трехмерного предмета, который может располагаться в области пространства между плоскостями 14, 15. Эту область мы называем трехмерным экраном.
Предложенный способ реализуется на данном устройстве следующим образом (фиг. 2). В трехмерном экране 1 синтезирующей лазерной системы формируются объемные изображения нескольких разнесенных тестовых графических фигур. Пациент 7 наблюдает эти изображения и управляет перемещением маркера с помощью средства позиционирования 2, например, клавиатуры или мыши. В момент визуального совмещения подвижного маркера 6 с опорной точкой 5 пациент нажимает определенную кнопку на устройстве позиционирования 2. Расстояние от зрительного анализатора до опорной точки и разница координат маркера 6 и опорной точки 5 по глубине относительно зрительного анализатора определяют остроту стереоскопического зрения.
Острота стереоскопического зрения автоматически вычисляется компьютером по известной величине разницы координат маркера и опорной точки (по глубине), расстоянию от зрительного анализатора до опорной точки. Затем результат вычислений передается на устройство вывода информации (дисплей или принтер). Благодаря высокой скорости формирования изображений маркера и опорной точки, их протяженность, определяемая сдвигом экрана по глубине пространства, может быть достаточно мала. В предлагаемом способе с помощью синтезирующей лазерной системы координаты маркера и опорной точки определяются с точностью, которая как минимум в 4 раза превосходит точность всех известных способов. Поэтому исключается погрешность в определении разности координат маркера и опорной точки.
В результате этого повышается точность определения порога стереоскопического зрения.
Пример реализации способа
Голова пациента с полным монокулярным зрением каждого глаза и бинокулярным зрением зафиксирована по отношению к экрану и находится на расстоянии 1 м от трехмерного экрана. Межзрачковое расстояние измерено и составляет 60 мм. На экране отображаются разнесенные по глубине трехмерные контурные фигуры с неподвижными опорными точками. Фигур может быть несколько. Пациент с помощью клавиатуры управляет перемещением подвижного маркера (например, крестика). Двигая маркер при помощи устройства позиционирования, пациент добивается визуального совмещения маркера с опорной точкой, обозначенной на фигуре. В этот момент он нажимает кнопку "Enter" на клавиатуре. Разница глубинных относительно зрительного анализатора координат маркера и опорной точки в миллиметрах заносится автоматически компьютерной программой в специальный файл. Процесс повторяется. Пациент передвигает маркер к следующей опорной точке и вновь нажимает кнопку "Enter" на клавиатуре, разница глубинных координат маркера и опорной точки становится следующей записью в файле. Количество повторений должно быть не менее 10 раз. По команде врача программа осуществляет статистическую обработку файла, вычисляется среднее значение разницы глубинных координат в миллиметрах и затем по этой величине рассчитывается согласно (1) бинокулярный параллакс в угловых секундах. Статистическое усреднение результатов повышает точность тестирования. У пациента оказалась острота глубинного зрения 4,9 мм, что составило 60 угловых секунд. Способ обеспечивает плавное, точное и непрерывное исследование остроты стереоскопического зрения с разрешающей способностью 0,25 угловой секунды.
Литература
1. А.с. SU 1637759, МКИ А 61 В 3/08.
2. Патент США 4506963, МКИ А 61 В 3/08.
3. Патент США 4035066, МКИ А 61 В 3/08.
4. В. В. Савельев, П.Е. Твердохлеб, А.В. Трубецкой, Ю.А. Щепеткин, Формирование трехмерных изображений с помощью каскадного высокоскоростного акустооптического дефлектора. Автометрия, 2, 1997 г., с. 11-14.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИФОКАЛЬНЫЙ СТЕРЕОДИСПЛЕЙ | 2001 |
|
RU2201610C2 |
| СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ | 1998 |
|
RU2143718C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ | 2013 |
|
RU2526879C1 |
| СПОСОБ ИЗОБРАЖЕНИЯ ПРЕДМЕТОВ (ВАРИАНТЫ) | 2003 |
|
RU2241258C2 |
| ДИФРАКЦИОННАЯ ИНТРАОКУЛЯРНАЯ ЛИНЗА | 2000 |
|
RU2186417C2 |
| СПОСОБ ЗАПИСИ ГОЛОГРАММ | 1999 |
|
RU2169937C2 |
| СПОСОБ ЗАПИСИ МАССИВА ТОЧЕЧНЫХ РАДУЖНЫХ ГОЛОГРАММ | 2001 |
|
RU2194296C1 |
| РАСТРОВАЯ ДИФРАКЦИОННО-АПЕРТУРНАЯ МАСКА ДЛЯ КОРРЕКЦИИ НЕДОСТАТКОВ ЗРЕНИЯ | 1997 |
|
RU2138837C1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ ЗАПИСИ ДИФРАКЦИОННЫХ СТРУКТУР | 2008 |
|
RU2377615C1 |
| СПОСОБ ИССЛЕДОВАНИЯ И ВОССТАНОВЛЕНИЯ БИНОКУЛЯРНОГО ЗРЕНИЯ | 1997 |
|
RU2133103C1 |
Изобретение относится к медицине, а именно к офтальмологии, и предназначено для исследования бинокулярного зрения и диагностики нарушений стереоскопического зрения. Техническим результатом является повышение точности определения порога стереоскопического зрения. В способе синтезирующая лазерная система, состоящая из лазера, экрана, отклоняющей системы и компьютера, формирует объемные изображения в виде разнесенных тестовых изображений с опорными точками и подвижными маркерами. Голову пациента фиксируют по отношению к средству формирования объемных изображений. Предъявляют пациенту тестовые изображения. Пациент управляет перемещением подвижного маркера до его визуального совмещения с опорной точкой. Определяют координаты маркера и опорной точки, а остроту зрения стереоскопического зрительного анализатора определяют по величине разницы этих координат и расстоянию от глаз пациента до опорной точки. Способ реализуется с помощью известных средств и не требует дополнительных конструкторских проработок. 3 ил.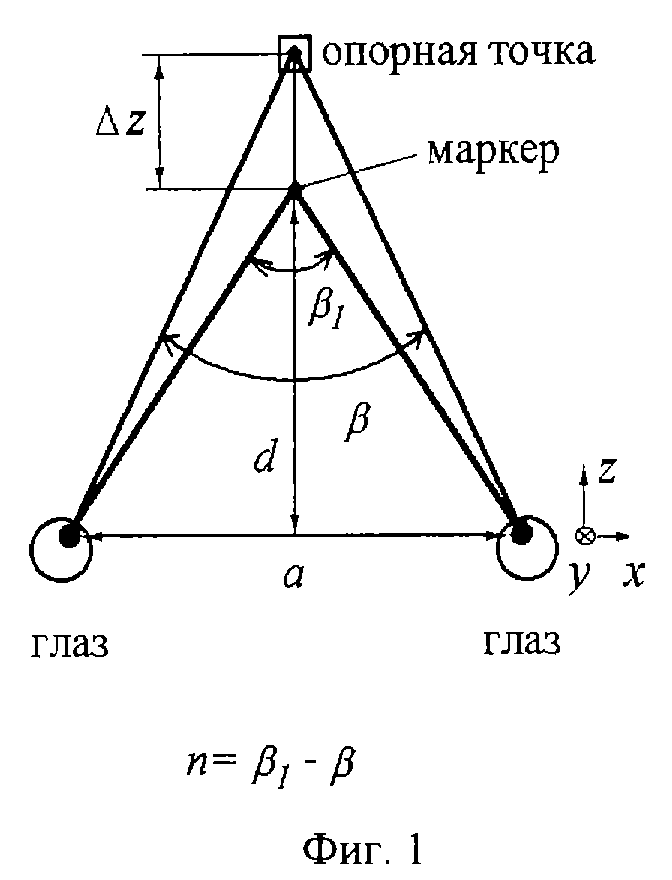
Способ тестирования стереоскопического зрительного анализатора путем предъявления тестовых изображений, отличающийся тем, что с помощью синтезирующей лазерной системы, состоящей из лазера, экрана, отклоняющей системы и компьютера, формируют объемные изображения в виде разнесенных тестовых изображений с опорными точками и подвижными маркерами, голову пациента фиксируют по отношению к экрану, предъявляют ему тестовые изображения, затем пациент с помощью средства позиционирования управляет перемещением подвижного маркера до его визуального совмещения с опорной точкой, далее определяют координаты маркера и опорной точки, а остроту зрения стереоскопического зрительного анализатора определяют по величине разницы этих координат и расстоянию от глаз пациента до опорной точки.
| US 4035066 А, 12.07.1977 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОРОГА СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ | 1995 |
|
RU2110206C1 |
| RU 94023830 А, 27.04.1996 | |||
| СТАНОК ДЛЯ доводки плоских ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 0 |
|
SU319446A1 |

