Изобретение имеет отношение к созданию поглощающей движение системы транспортировки, предназначенной для перемещения людей и/или объектов между плавучим судном и установкой, например нефтяной морской платформой (нефтяным морским основанием). Настоящее изобретение также имеет отношение к созданию пешеходного соединения между плавучим судном и установкой.
В настоящее время используют ряд различных технических решений для перемещения людей и грузов между плавучим судном и морской платформой. В связи с наличием относительного движения (перемещения) между плавучим судном и морской платформой существует большая потребность в системах транспортировки указанного типа. Для транспортировки раньше использовали корзины, подвешенные на стреле крана, причем корзину поднимали при помощи лебедки, снабженной тяжелой системой компенсации. Однако корзины такого типа обладают высокой степенью риска, так как относительное движение между судном и морской платформой легко может приводить к удару корзины о судно или о платформу со значительной силой. Существует также риск опрокидывания корзины при выгрузке, что приведет к выпадению из нее людей и/или грузов. Известно также использование переходов (мостков) между платформами, которые образуют жесткую связь между ними. Однако такие переходы не годятся для транспортировки людей между морской платформой и плавучим судном при большом относительном движении между ними.
Примеры известных в данной области технических решений приведены в патентах Норвегии NО 145131, NO 15179, NO 157255, а также в патентах США US 3008158, US 4011615 и US 4169296. Например, в патенте US 4169296 раскрыто использование шарового шарнирного соединения между внешним концом перехода и платформой, а в патенте NO 145131 раскрыто использование натяжного троса для опускания внешнего конца перехода на платформу. Однако ни в одной из указанные публикаций не подсказывается возможность использования натяжного троса в сочетании с шаровым шарнирным соединением. Более того, недостатком всех известных технических решений является то, что переход имеет независимую опору (является независимым), причем в предложенных технических решениях не предусмотрена возможность перемещения грузов большого веса или размера через переходное соединение.
В связи с изложенным, существует большая потребность в создании более безопасной системы транспортировки, которая может служить безопасным пешеходным соединением между плавучим судном и установкой и которая одновременно приспособлена для перемещения грузов между двумя установками. Поэтому в соответствии с настоящим изобретением предлагается поглощающая движение система транспортировки с характеристиками, указанными в отличительной части п.1 формулы изобретения. Кроме того, в соответствии с настоящим изобретением предлагается соответствующий способ с характеристиками, указанными в отличительной части п.6 формулы изобретения.
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, данного в качестве примера, приведенного со ссылкой на чертежи.
На фиг.1 показан вид сбоку системы транспортировки в целом.
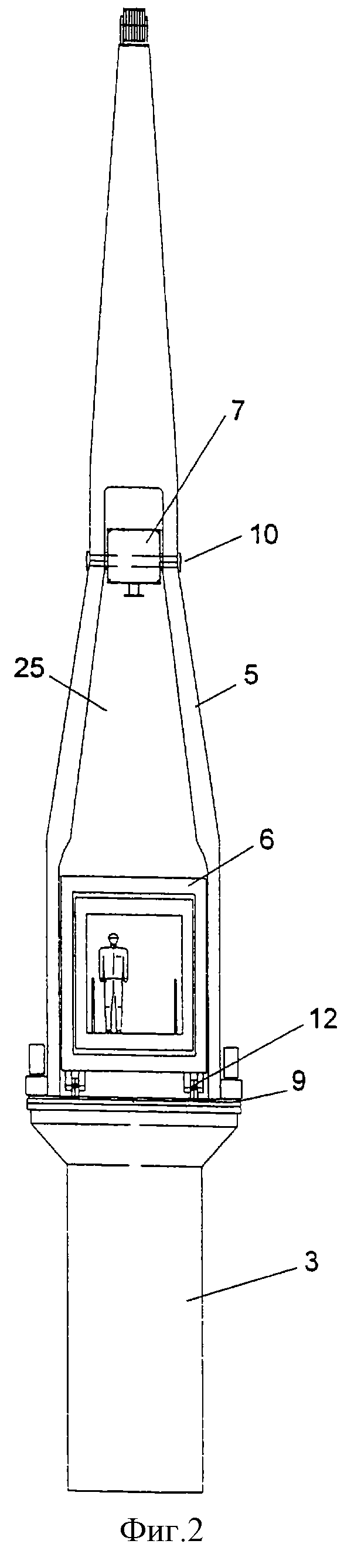
На фиг. 2 показано сечение системы транспортировки у поворотной стойки (колонны) судна, которая служит опорой перехода на одном из его концов.
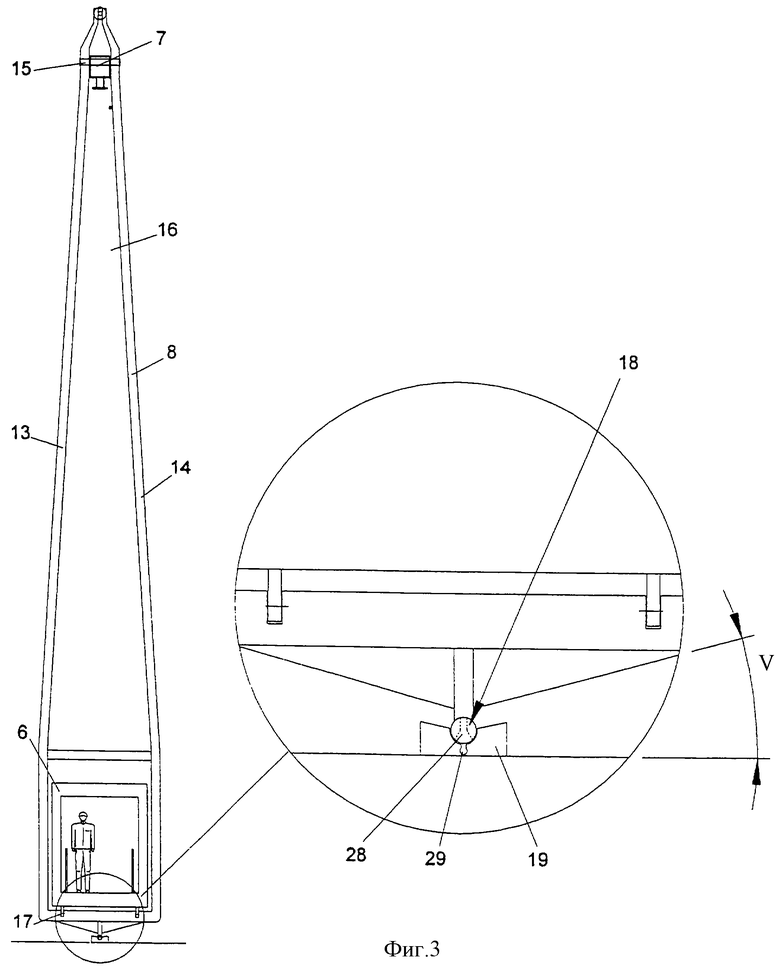
На фиг.3 показан внешний конец системы транспортировки.
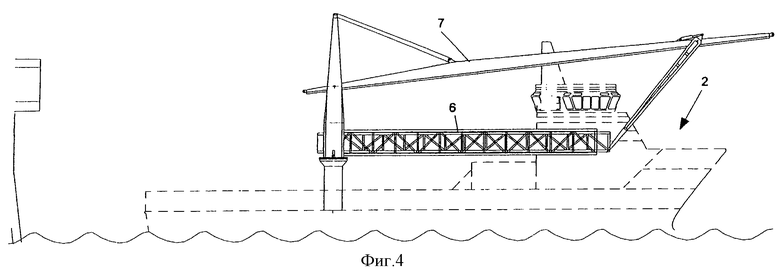
На фиг.4 показана система транспортировки в резервном (не используемом) состоянии на борту судна.
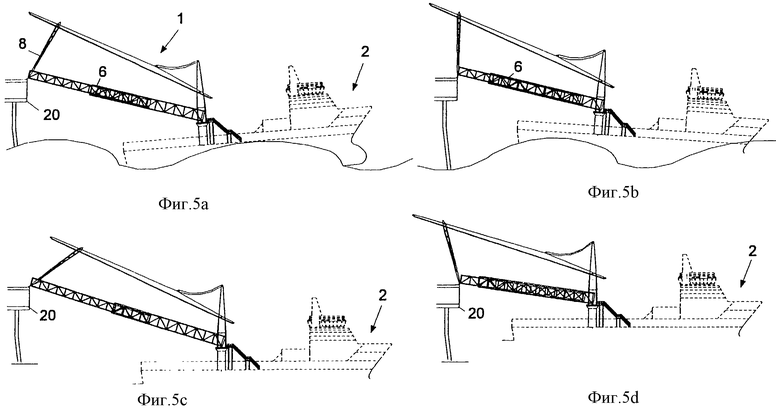
На фиг.5 показан вид сбоку системы транспортировки в различных положениях, с переменными расстояниями между платформой и судном в вертикальном и горизонтальном направлениях.
На фиг.6 показан вид сверху системы транспортировки в различных положениях.
На фиг. 7 иллюстрируется способ соединения системы транспортировки с платформой.
На фиг. 8 показано средство аварийного разъединения системы транспортировки.
На фиг. 9-47 показан альтернативный вариант настоящего изобретения, который в настоящее время является наиболее предпочтительным.
На фиг.9 показаны основные компоненты системы.
На фиг.10a, b и с показана внутренняя часть системы транспортировки.
На фиг.11 показана шарнирная стрела.
На фиг.12 показан внешний конец стрелы с рамой.
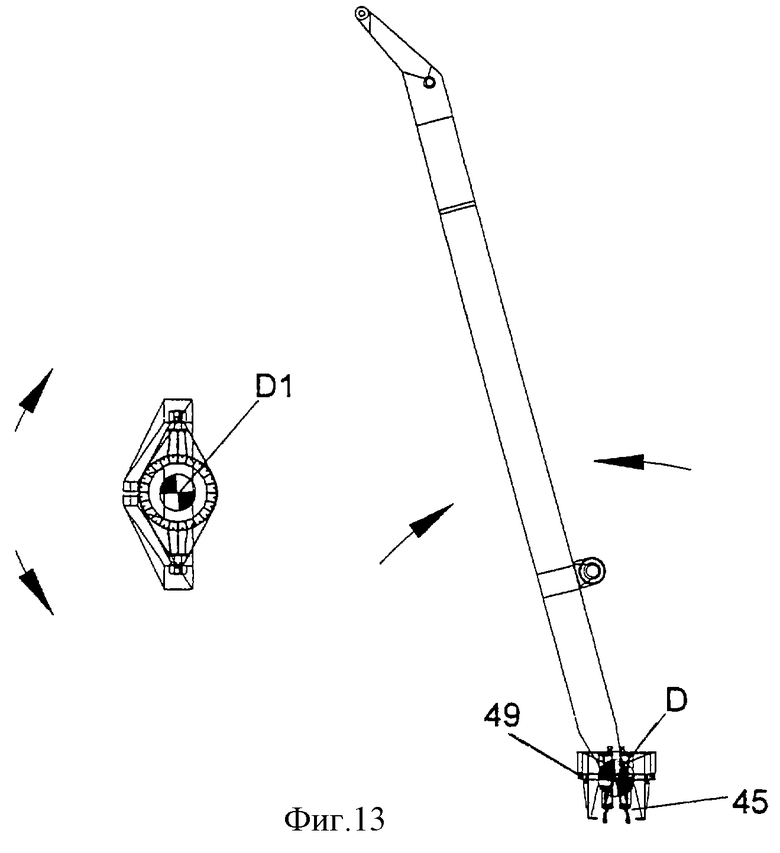
На фиг.13 показана рама с соединительным устройством.
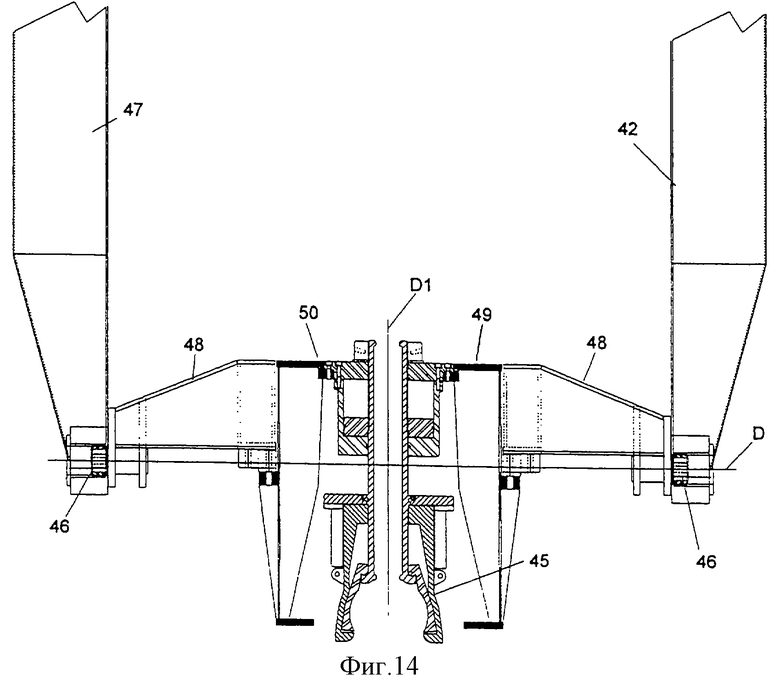
На фиг.14 показано соединительное устройство.
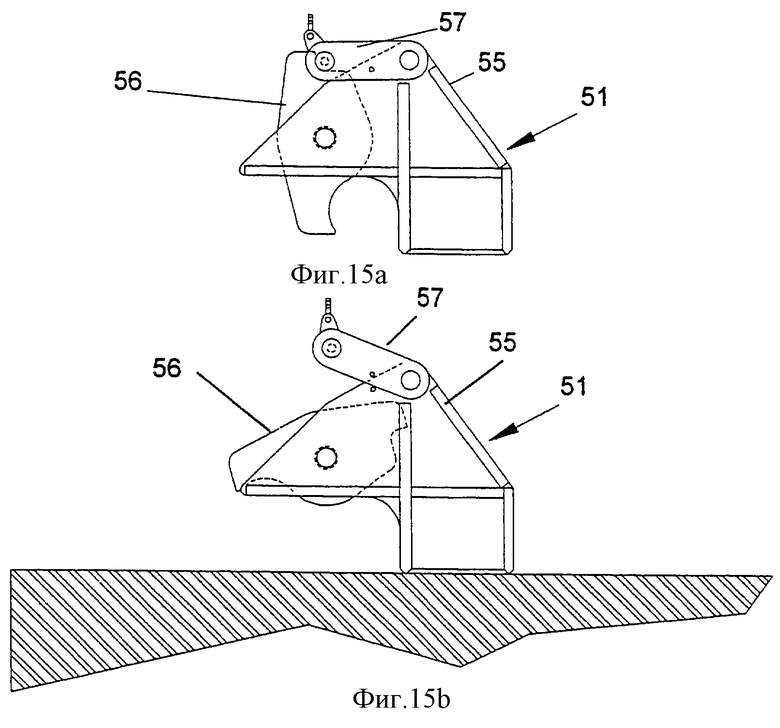
На фиг 15а и b показан механизм быстрого разъединения.
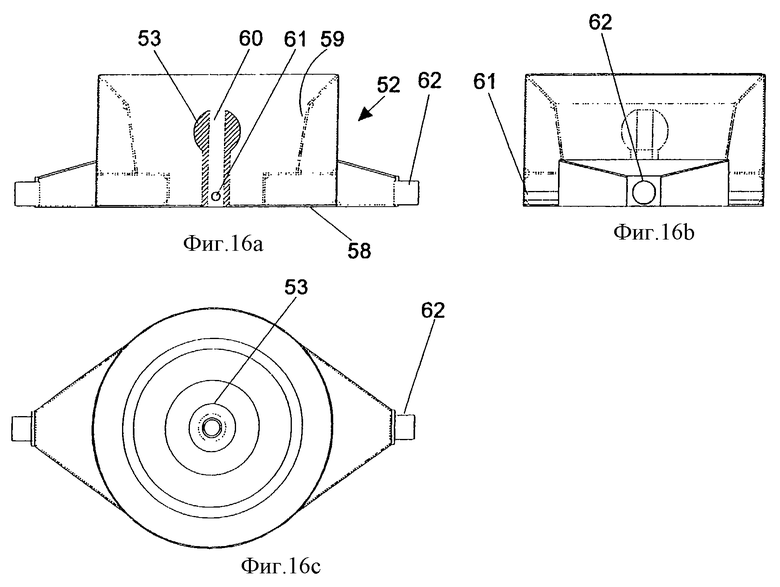
На фиг.16a, b и с показано основание.
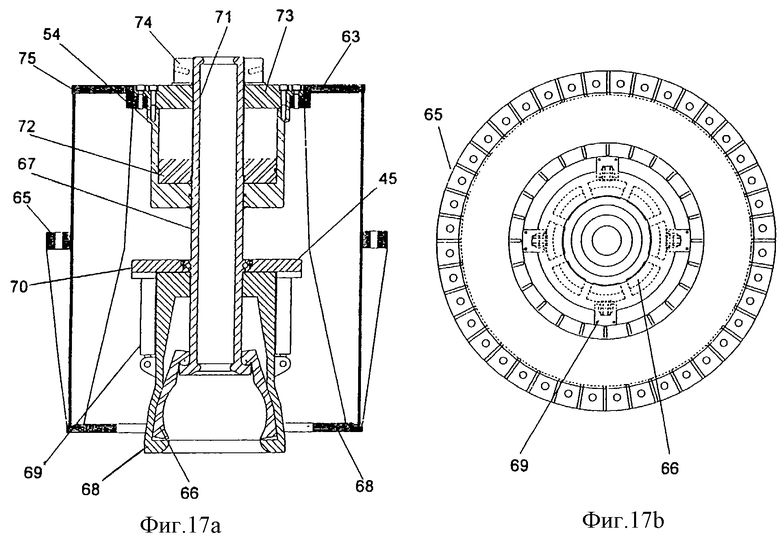
На фиг.17а и b показана одна из деталей соединительного устройства.
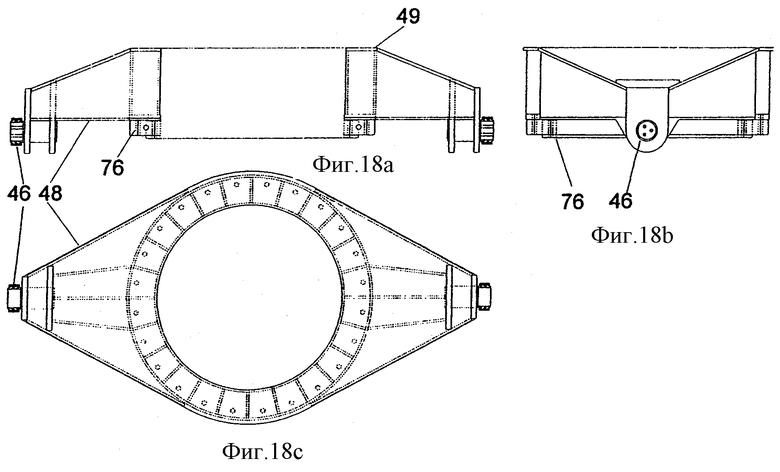
На фиг.18а, b и с показан корпус подшипника.
На фиг.19-34 показаны этапы соединения системы транспортировки.
На фиг.35-38 показаны этапы нормальной процедуры разъединения.
На фиг.39-43 показаны этапы аварийного разъединения.
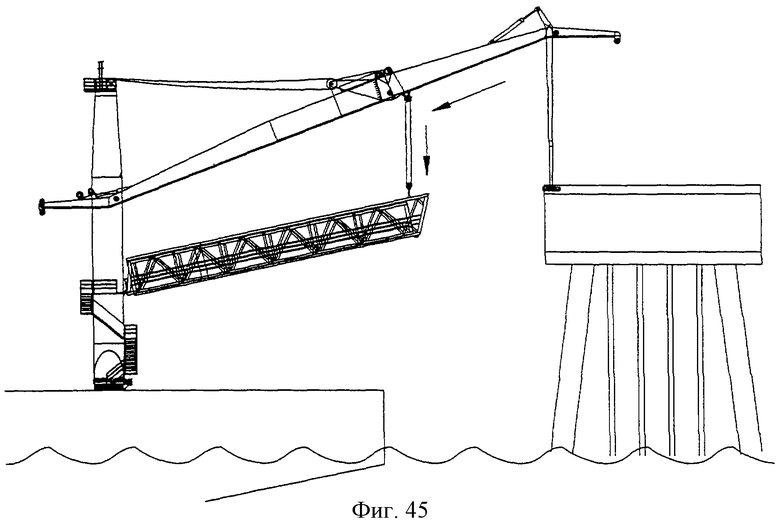
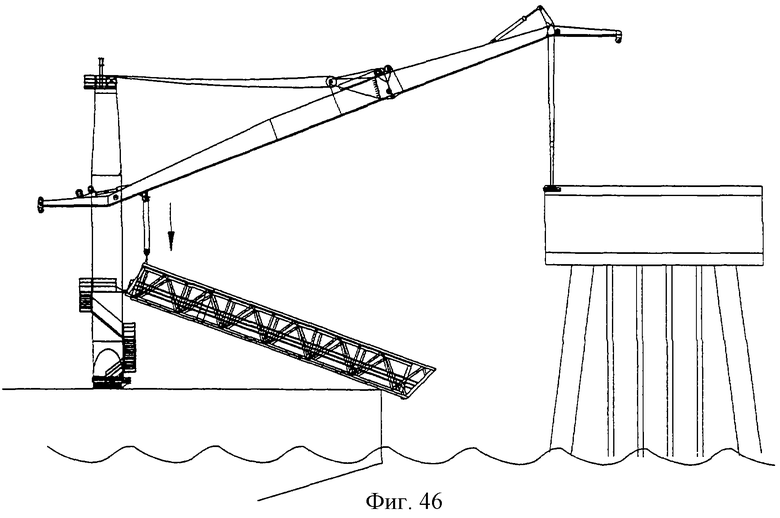
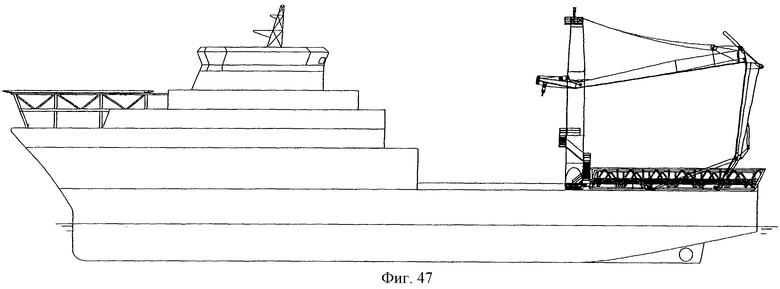
На фиг.44-47 показаны этапы разъединения и укладки перехода.
На фиг. 1 показана поглощающая движение система транспортировки 1 в соответствии с настоящим изобретением, смонтированная на судне 2. Система транспортировки 1 главным образом включает в себя стойку 3, установленную на палубе 4 судна 2, башню 5, переход 6, стрелу 7 и раму 8.
Стойка 3 и башня 5 показаны более подробно на фиг.2. Башня 5 шарнирно соединена со стойкой 3, что позволяет башне 5 совершать поворот по меньшей мере на 360o относительно стойки 3, которая постоянно закреплена на палубе 4 судна 2. Для обеспечения возможности указанного поворота между башней 5 и стойкой 3 предусмотрено обычное шарнирное соединение 9. Стрела 7 шарнирно соединена с башней в сочленении 10, что позволяет стреле 7 совершать движение качания в вертикальной плоскости. Лебедка (не показана) соединена при помощи троса 11 (см. фиг.1) со стрелой 7, что позволяет внешнему концу стрелы 7 подниматься и опускаться в вертикальной плоскости. Переход 6 также шарнирно соединен с башней 5 в сочленении 12, что также позволяет переходу 6 совершать движение качания в вертикальной плоскости.
Внешний конец системы транспортировки 1 более подробно показан на фиг.3. Рама 8 соединяет вместе внешние концы стрелы 7 и переход 6. Рама 8 содержит первое плечо 13 и второе плечо 14, каждое из которых шарнирно соединено со стрелой 7 в сочленении 15. Плечи 13 и 14 образуют между собой открытое пространство (окно) 16. Рама 8 охватывает переход 6 и шарнирно соединена с ним в сочленении 17. На обратной стороне рамы 8 предусмотрен шаровой элемент 18, который предназначен для входа в шаровое седло 19, неподвижно закрепленное, например, на палубе морской платформы 20.
Между стрелой 7 и рамой 8 дополнительно введен гидравлический исполнительный механизм 21, который предназначен для возбуждения принудительного поворота (качания) рамы 8 относительно стрелы 7. Передвижной блок или подвижная лебедка 22 установлен(а) в направляющей 23 на обратной стороне стрелы 7 с возможностью перемещения вдоль стрелы 7 от ее внешнего конца до внутреннего конца. К передвижному блоку 22 при помощи троса 24а подсоединен подъемный крюк 24, который позволяет транспортировать грузы между судном 2 и морской платформой 20. За счет открытого пространства 16 в раме 8 и соответствующего открытого пространства 25 в башне 5 передвижной блок и крюк 24 могут свободно перемещаться вдоль стрелы 7 над переходом 6.
Переход 6 состоит по меньшей мере из двух частей: 6а и 6b, причем часть 6а телескопически входит в часть 6b. Обе части 6а и 6b выполнены в виде каркасной конструкции, что обеспечивает защиту со всех сторон находящихся на переходе 6 людей. Переход 6 может быть полностью закрыт со всех сторон подобно туннелю или может содержать отверстия (окна). Доступ с палубы 4 на переход 6 через верхнюю часть стойки 3 обеспечен за счет входной лестницы 26. Co стороны платформы внешний конец перехода 6 расположен достаточно близко к палубе морской платформы, поэтому лестница на этой стороне обычно не требуется. Однако по желанию на палубе морской платформы может быть предусмотрен небольшой комплект лестниц для спуска у внешнего конца перехода 6.
На фиг.4 показана система транспортировки в резервном (не используемом) состоянии, в котором стрела 7 и переход 6 повернуты в исходное положение над судном 2. В резервном состоянии переход 6 может быть по желанию разъединен с башней 5 и рамой 8 и снят, а рама 8 может быть с поворотом внутрь прижата к стреле 7 или также снята, что позволяет использовать стойку 3, башню 5 и стрелу 7 как обычный кран.
На фиг. 5 показаны различные состояния системы транспортировки в зависимости от конкретного положения судна 2 относительно морской платформы 20. За счет применения шарового шарнирного соединения переход 6 и рама 8 получают возможность поворота в трех направлениях относительно морской платформы 20 в указанном шаровом шарнирном соединении 18, 19. На фиг.5а показан внутренний конец перехода 6, расположенный на 1 метр ниже номинального положения и на 6,5 метров дальше от морской платформы по сравнению с номинальным положением. Движение в направлении к платформе и в обратном направлении сначала производят за счет телескопического действия перехода 6. На фиг.5b показан внутренний конец перехода 6, расположенный на 2,5 метра выше номинального положения и на 5,5 метров ближе к морской платформе по сравнению с номинальным положением. На фиг.5с и 5d показаны два крайних положения системы транспортировки, причем на фиг.5с показано судно 2 в его самом низком положении, а на фиг.5d показано судно 2 в его самом высоком положении и на самом малом расстоянии от морской платформы 20. В данном случае расстояние от судна до морской платформы может изменяться ориентировочно на 20 метров без создания чрезмерных деформаций в системе транспортировки. Высота морской волны от ее вершины до основания может достигать 13 метров без создания деформаций в системе транспортировки.
На фиг.6 показан вид сверху системы транспортировки; на фиг.6а показано номинальное положение, а па фиг. 6b показаны четыре различных крайних (экстремальных) положения. Из рассмотрения фиг.6b можно понять, что система транспортировки способна совершать поворот в секторе 90o без чрезмерного ее удлинения. Судно также может изменять свое положение по отношению к морской платформе на 180o.
На фиг. 3 максимальное движение бортовой качки системы транспортировки показано как угол V.
Теперь со ссылкой на фиг.7 будет описан способ создания пешеходного соединения между судном 2 и морской платформой 20. На фиг.7а внешний конец перехода 6 приведен в положение главным образом над шаровым седлом 19 на морской платформе 20. Для установки шарового элемента над шаровым седлом производят вращение башни 5 и поворот рамы 8 при помощи исполнительного механизма 21, пока шаровой элемент не займет правильное положение. Трос 27, пропущенный через отверстие в шаровом седле 19, опускают вниз в направлении к морской платформе 20. Трос 27 может быть закреплен в приемном устройстве 29 шарового седла 19 дистанционно или вручную оператором на морской платформе 20. Лебедку, которая удерживает стрелу 7, включают при постоянной силе тяги, причем поворотный двигатель и тормоз, контролирующий вращение башни 5, и исполнительный механизм 21 рамы 8 расцеплены, при этом лебедка начинает производить натяжение троса 27 для того, чтобы ввести шаровой элемент 18 вниз в шаровое седло 19. Как только обеспечен контакт между шаровым элементом 18 и шаровым седлом 19, лебедка поддержки стрелы 7 уменьшает натяжение, что позволяет шаровому элементу 18 опуститься в шаровое седло 19 и прижаться к нему под действием веса стрелы 7, рамы 8 и перехода 6.
Процедура разъединения является обратной по отношению к описанной выше, причем включают лебедку для стрелы 7, а в лебедке для троса 27 ослабляют натяжение (троса) до тех пор, пока шаровой элемент 18 не поднимется с шарового седла 19 в достаточной степени для освобождения троса 27 из шарового седла 19. После этого стрела 7 и переход 6 могут быть повернуты в положение над судном 2.
На фиг. 8 показана процедура аварийного разъединения. В этой ситуации лебедку для стрелы 7 включают одновременно с удалением судна от морской платформы 20. Телескопическое соединение между секциями 6а и 6b позволяет переходу 6 удлиняться до тех пор, пока он не доходит до своего концевого положения, в котором благодаря совместному действию лебедки 7, поднимающей внешний конец перехода 6, и создаваемому переходом 6 направленному наружу усилию шаровой элемент 18 выходит из шарового седла 19, так что при начале аварийной процедуры соединение между тросом 27 и шаровым седлом 19 расцепляется.
Далее со ссылкой на фиг.9-47 будет описана система с шарнирной стрелой. Шарнирная стрела главным образом снижает изгибающий момент, приложенный к стойке во время входа в соединение и выхода из него. Кроме того, это позволяет уменьшить необходимое пространство при укладке стрелы на палубе при перевозке.
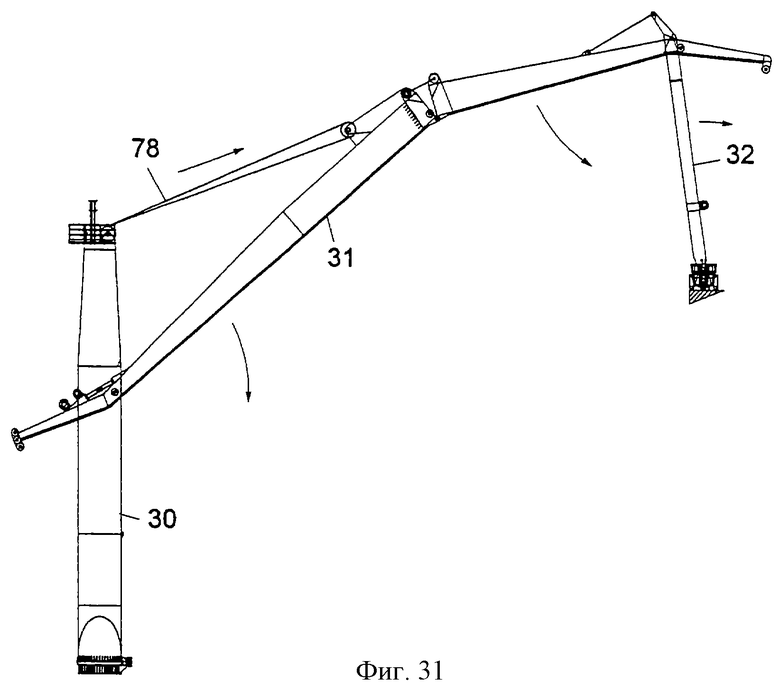
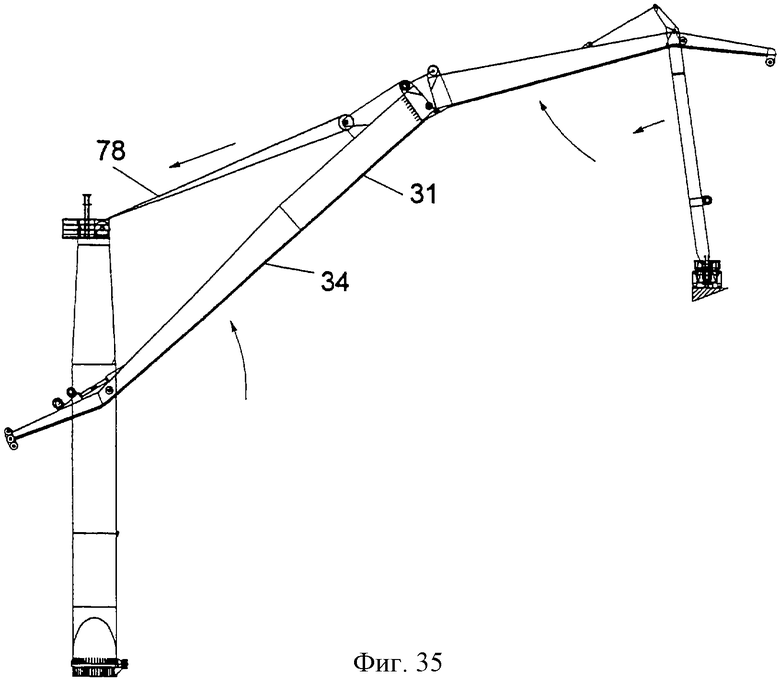
На фиг. 9 показаны основные компоненты системы, в том числе стойка 30, стрела 31, рама 32 и переход 33. Стрела имеет конструкцию из двух частей, с внутренней секцией 34 и внешней секцией 35, которые соединены вместе в сочленении В при помощи шарнирного механизма 36.
На фиг. 10а-10с показана стойка 30 со средством 37 подвески и подъема стрелы 31. Стрела является шарнирной, как упоминалось ранее, причем здесь показана только самая внутренняя секция 34. Подъем стрелы 31 производится при помощи подъемной системы с тросом с верхней части стойки 30. Стрела 31 подвешена к стойке 30 при помощи двухосной подшипниковой системы 38. Стрела 31 может совершать поворот относительно поперечной горизонтальной оси А (фиг. 10а) при подъеме и опускании, а также может свободно вращаться относительно продольной оси А1 (фиг.10b).
Стойка 30 установлена на палубе судна в подшипнике и может вращаться относительно вертикальной оси А2 (фиг.10с). Поворотные исполнительные механизмы 39 установлены в связи с подшипником 40; они могут быть отключены или могут управлять движением поворота стойки 30.
На фиг. 11 показана стрела 31 с шарнирным механизмом 36 в сочленении В. Гидроцилиндр 41, установленный у вершины стрелы 31, управляет ее складыванием (свертыванием) и ограничивает максимальное движение раскрыва. При втягивании цилиндра 41 стрела 31 распрямляется и движение механически ограничивается таким образом, что нижний конец двух секций 34, 35 стрелы образует прямую линию.
На фиг.12 показано соединение между внешней секцией 35 стрелы 31 и рамой 32. Рама 32 шарнирно соединена с секцией 35 стрелы на оси С. Управление поворотом рамы 32 производится при помощи гидроцилиндра 42, установленного между верхней частью 43 рамы 32 и кронштейном 44 на стреле 31.
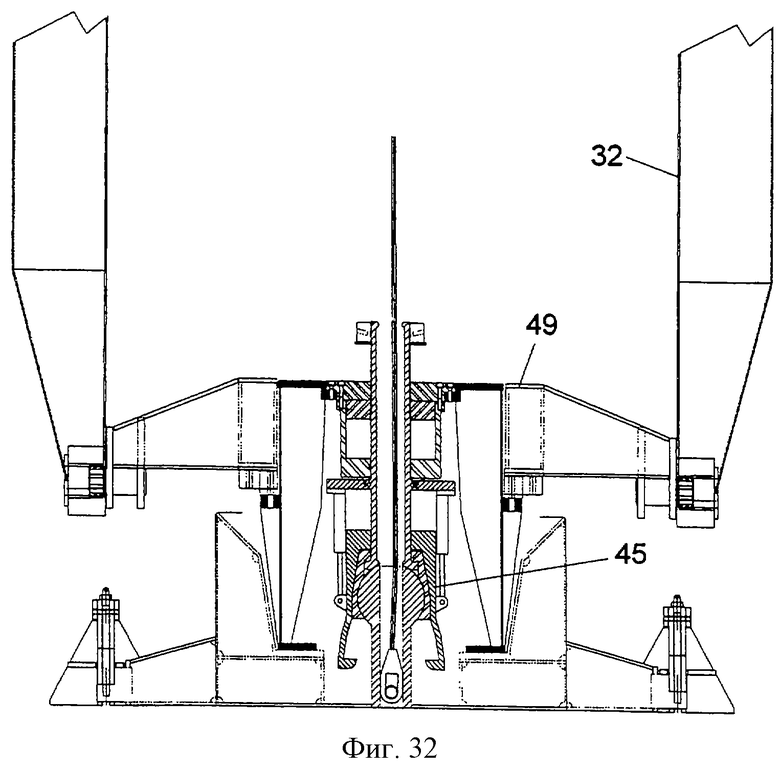
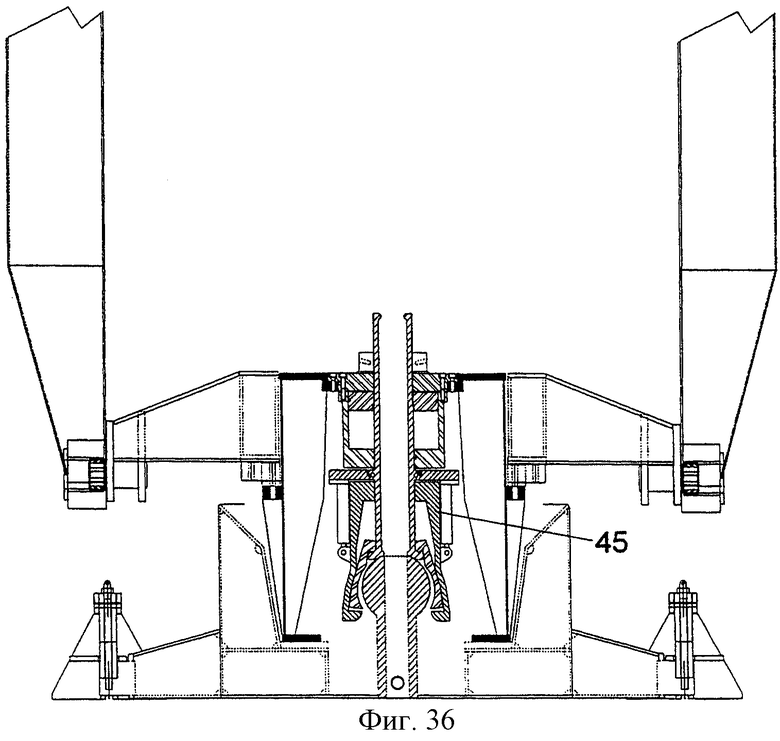
На фиг. 13 и 14 показана рама 32 с подшипником 49 и соединительным элементом 45. Рама 32 и соединительный элемент 45 выполнены с возможностью свободного поворота по отношению друг к другу относительно горизонтальной оси D, которая, как это показано на фиг.14, проходит через два опорных подшипника 46, установленных на двух плечах 48 корпуса подшипника 49, причем указанные опорные подшипники 46 введены в плечи 47 рамы 32. В поворотном подшипнике 50, установленном между корпусом подшипника 49 и соединительным элементом 45, предусмотрена вертикальная ось D1, вокруг которой может вращаться рама 32 вместе с корпусом подшипника 49.
Далее будут описаны со ссылкой на фиг.15а и 15b, 16а-с, 17а и 17b и 18а-с элементы системы погрузки для соединения с платформой, которая включает в себя следующие основные компоненты: механизм быстрого разъединения 51 (см. фиг.15а и 15b), основание 52 (см. фиг.16а-с) со стопорным шаровым элементом 53, соединительный элемент 45 с цилиндром вытягивания вниз 54 (см. фиг.17а и17b) и корпус подшипника 49 для рамы 32 (см. фиг.18a-с).
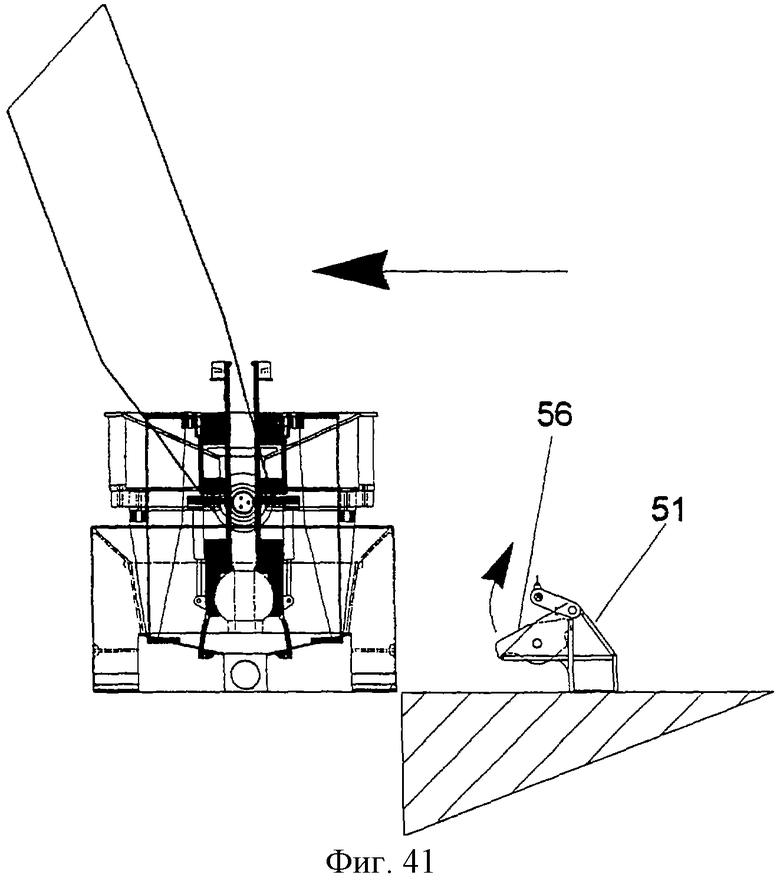
Показанный на фиг 15a и 15b механизм быстрого разъединения 51 имеет корпус 55, стопорную собачку 56 и устройство расцепления 57. Устройство расцепления 57 соединено с судном и контролируется с него при помощи механического или электронного дистанционного управления. На морской платформе предусмотрены два таких механизма быстрого разъединения 51, которые надежно приварены на платформе с каждой из сторон основания 52, имеющего стопорный шаровой элемент 53 (см. фиг.16а, b и с).
Основание 52 имеет цилиндрический корпус 58 с внутренней конической направляющей поверхностью 59, а также содержит стопорный шаровой элемент 53 с внутренней вертикальной проточкой 60 для натяжного троса, горизонтальное отверстие 61 для фиксации натяжного троса и анкерные пальцы 62. Стопорные собачки 56 блокируют анкерные пальцы 62 таким образом, что основание 52 крепится на палубе морской платформы.
На фиг.17а показано вертикальное сечение через соединительный элемент 45 цилиндра вытягивания вниз 54, а на фиг.17b показан его вид снизу. На фиг.17а можно видеть кольцевой концевой колпачок 75, имеющий верхний фланец 63 для ввода цилиндра вытягивания вниз 54 и посадочный фланец 64 снизу, вместе с внешним фланцем 65 для поворотного подшипника. На нижнем конце штока 67 цилиндра подвешены восемь стопорных пальцев 66.
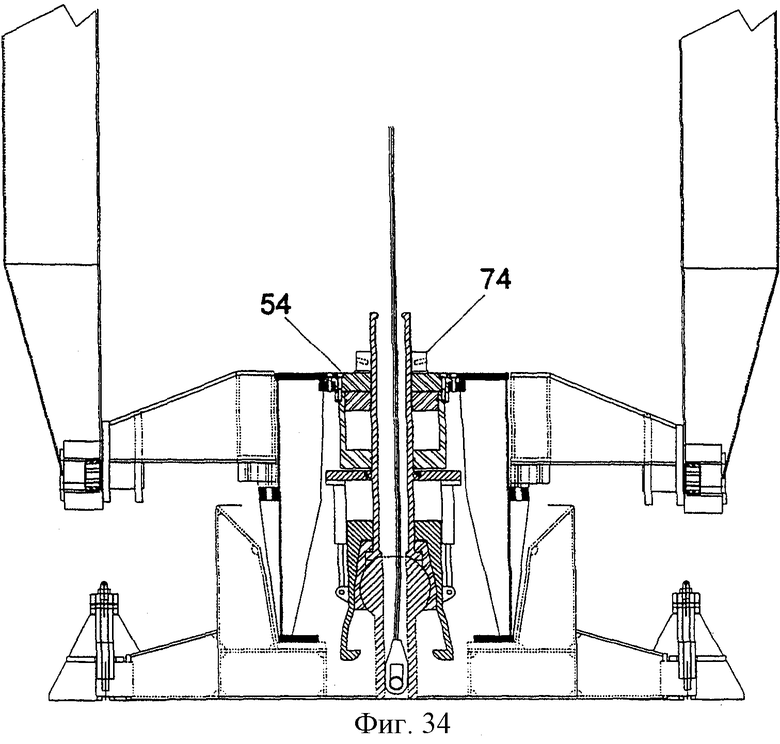
Стопорные пальцы 66 имеют сферическую форму внутри и коническую форму снаружи. Юбка 68, которая имеет внутри соответствующую коническую форму, выполнена с возможностью вертикального перемещения при помощи исполнительных элементов 69, закрепленных на фланце 70, который в свою очередь закреплен на штоке 67 цилиндра. При опускании юбки 68 стопорные пальцы 66 принудительно сжимаются и охватывают шаровой элемент 53 (см. фиг.16а). В штоке 67 цилиндра предусмотрена сквозная продольная проточка 71 для пропускания через нее троса, причем шток 67 установлен в поршне 72, который выполнен с возможностью вертикального перемещения в цилиндре 54. Шток 67 проходит через верхний фланец 73 цилиндра 54 и имеет навернутую на него внешнюю гайку 74.
На фиг 18а-с показал корпус подшипника 49 для рамы 32, который представляет собой цилиндр с плечами 48, в которых установлены подшипники 46 для установки плеч 47 рамы 32, а также с поворотным подшипником 76. Подшипник 76 установлен на болтах на фланце 65 (см. фиг 17а), так что он повторяет движение рамы 32.
Установление мостового соединения между судном и морской платформой происходит следующим образом.
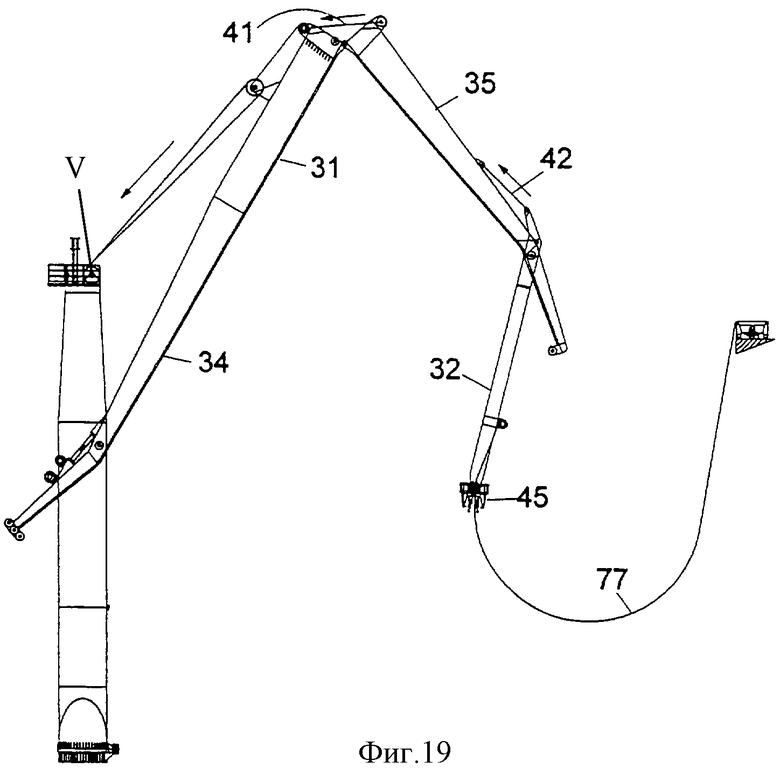
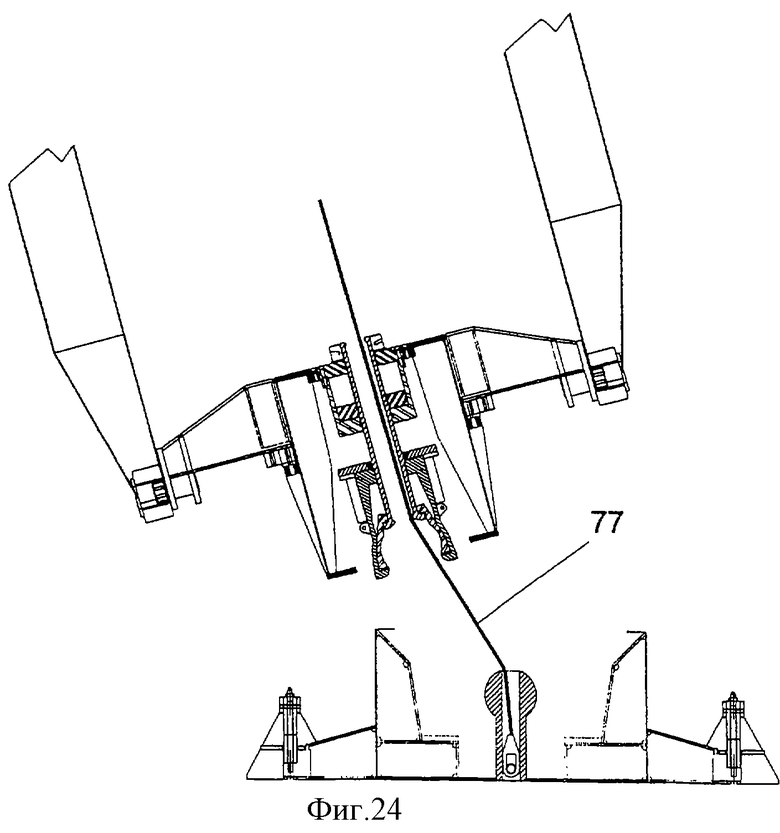
Прежде всего, как это показано на фиг 16, производят блокировку основания 52 на палубе морской платформы при помощи показанного на фиг.15 механизма быстрого разъединения за счет блокировки с охватом стопорными собачками 56 пальцев 62. Судно занимает исходное положение, после чего сразу закрепляют трос 77 на основании 52 на морской платформе, как это показано на фиг 24. Трос 77 пропускают через проточку 60 в шаровом элементе 53 и через проточку 71 в штоке 67 цилиндра и закрепляют его в лебедке V (см. фиг.19). Это может быть сделано на палубе судна, когда стрела 31 находится в сложенном положении и рама 32 полностью уложена. После этого внутреннюю секцию стрелы 31 поднимают до максимального вертикального положения, в то время как внешняя секция 35 стрелы 31 остается сложенной, и рама опускается в вертикальное положение, когда производят расцепление исполнительного механизма 42.
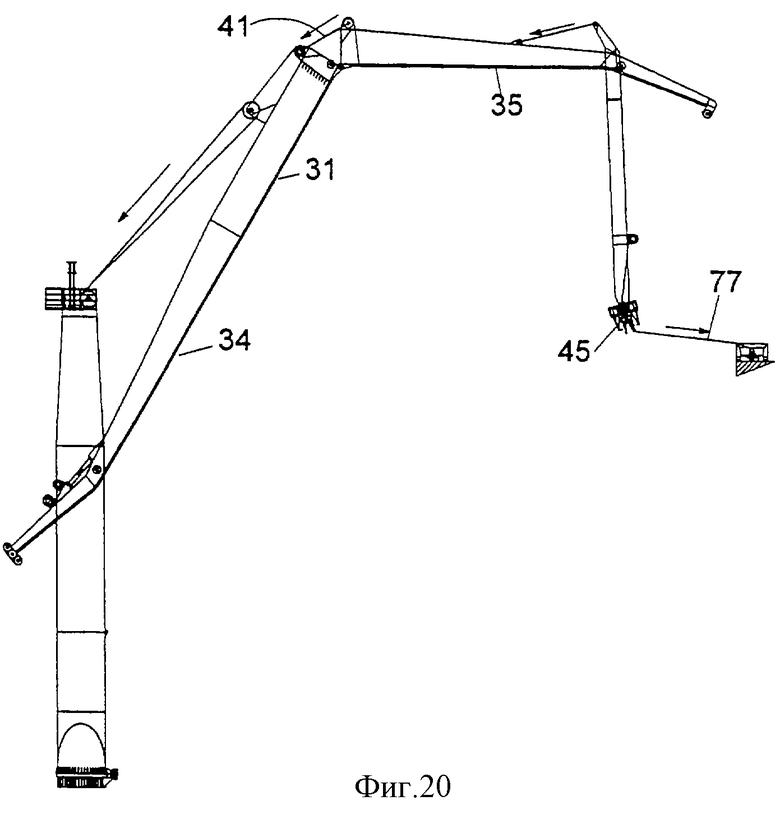
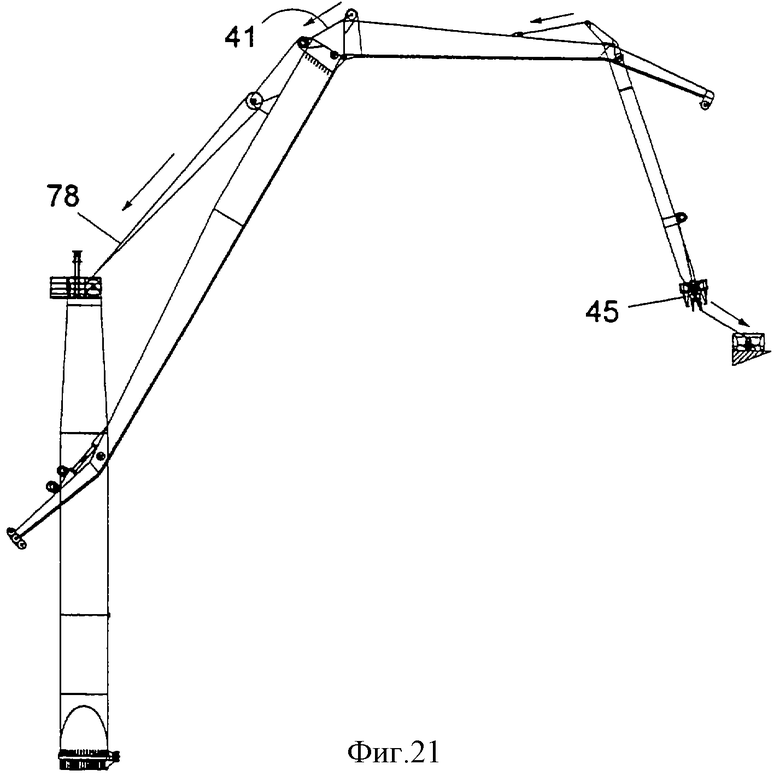
Лебедка V натягивает трос 77 и рама 32 подтягивается к механическому стопору на секции 35 стрелы, так что эта секция вытягивается вдоль и стрела 31 выпрямляется (см. фиг.20). После этого включают исполнительный механизм 41 и стрела 31 полностью выпрямляется наружу, так что соединительный элемент 45 удерживается (располагается) над основанием 52 на морской платформе (см. фиг.21).
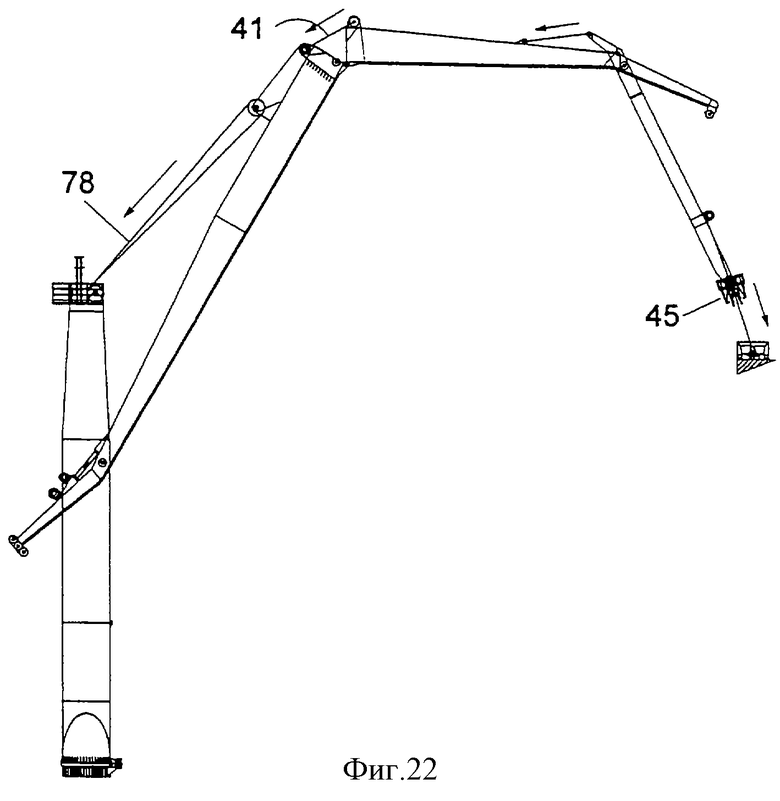
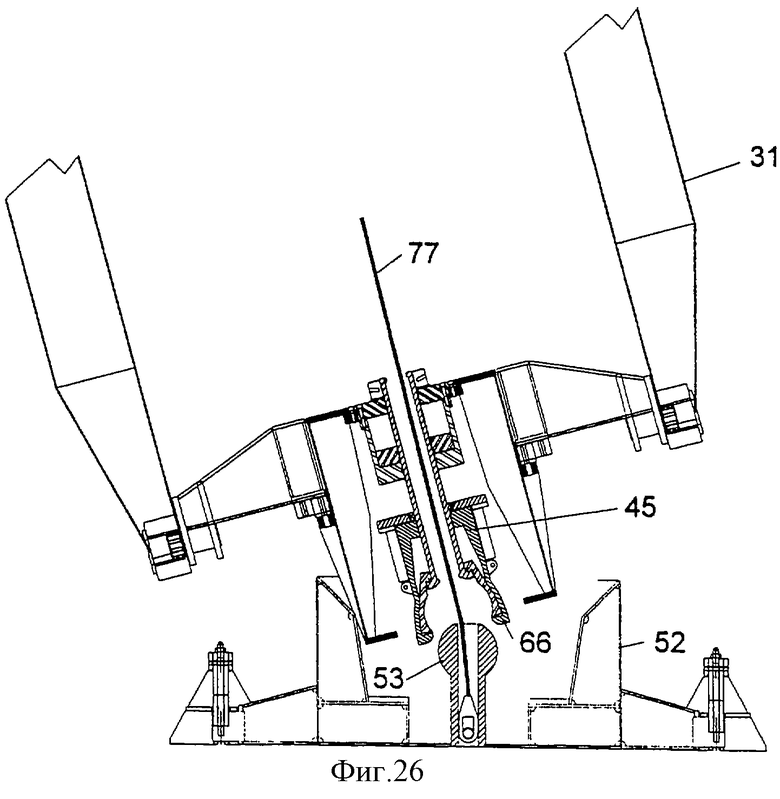
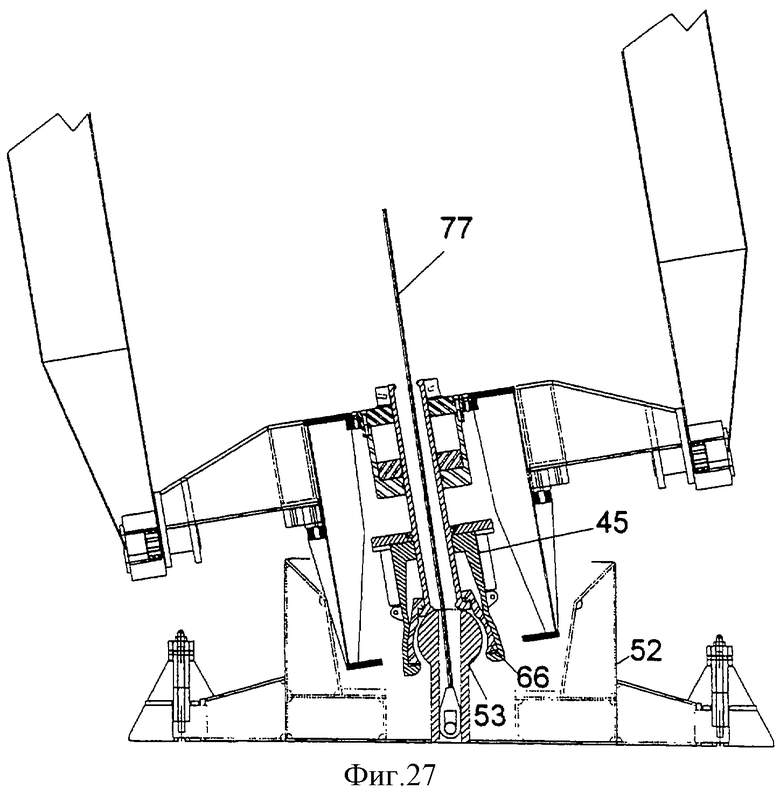
Исполнительный механизм 78 подъема стрелы и исполнительный механизм 41 сочленения стрелы поддерживают постоянное усилие, в то время как лебедка V непрерывно подтягивает соединительный элемент 45 к основанию 52 на морской платформе (см. фиг. 22). На фиг.23а, 23b и 24 показаны угловая девиация и позиционная девиация, которые позволено иметь соединительному элементу 45 в ходе процесса натяжения. На фиг.25 и 26 показано внутреннее управление в основании 52 в направлении к внешней части соединительного элемента 45, которое обеспечивает центрирование стопорных собачек 66 относительно шарового элемента 53. На фиг. 27 показана ситуация, в которой соединительный элемент 45 уже опущен в шаровой элемент 53 и удерживается на месте за счет силы натяжения троса 77.
Затем приводят в действие исполнительный механизм 79 в соединительном элементе 45, при этом юбка 68 принудительно смещается вперед и стопорные пальцы 66 закрепляют соединение на основании 52 (см. фиг.28).
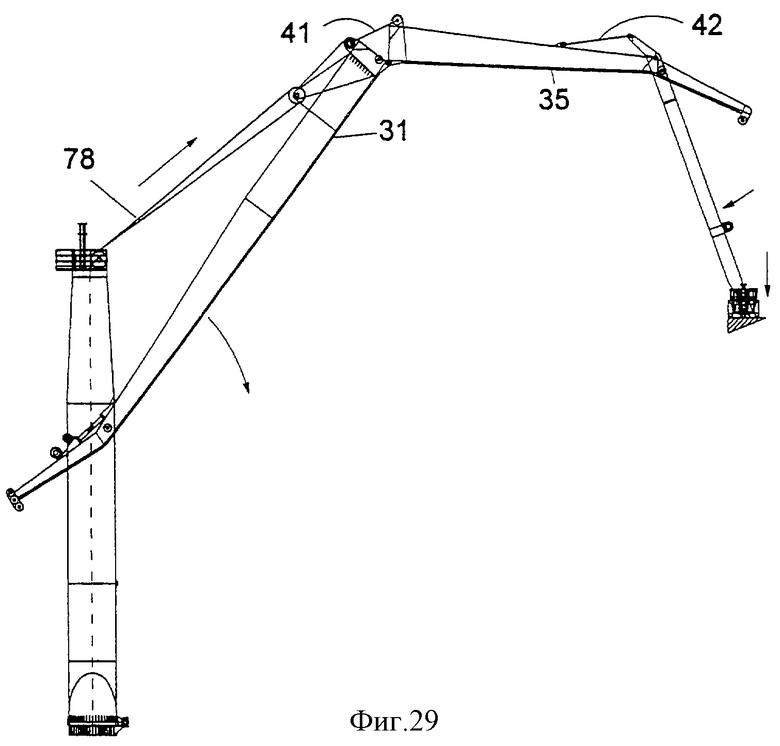
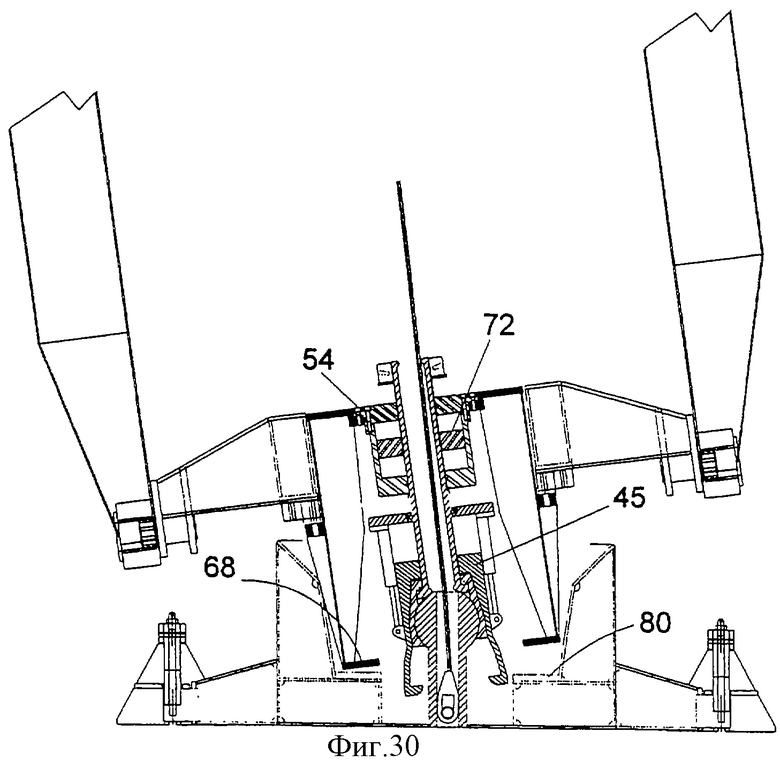
Одновременно исполнительный механизм 41 сочленения стрелы и исполнительный механизм 42 рамы разъединяются и исполнительный механизм 78 стрелы начинает опускать внешнюю секцию 35 стрелы 31 (см. фиг.29). Цилиндр вытягивания вниз 54 в соединительном элементе 45 приводится в действие за счет приложения давления к нижней стороне поршня 72 (см. фиг.17а), что приводит к смещению концевого колпачка 75 вниз, так что юбка (фланец) 68 (см. фиг.17а) встречается с основанием 52 (см. фиг.30). Цилиндр вытягивания вниз 54 подтягивает юбку 68 к седлу 80 в основании 52, так что соединительный элемент 45 с корпусом подшипника 49 и рама 32 выпрямляются и занимают вертикальное положение (см. фиг.31 и 32). Одновременно внутренняя секция 34 стрелы 31 опускается в рабочее положение (см фиг.31) и исполнительный механизм 78 подъема стрелы полностью снимает натяжение, так что свободно подвешенная стрела 31 теперь лежит на стойке 30 и на раме 32 (см. фиг.33).
После этого вручную затягивают гайку 74 и снимают давление с цилиндра вытягивания вниз 54, за счет чего обеспечивается механическая затяжка крепления (см. фиг.34).
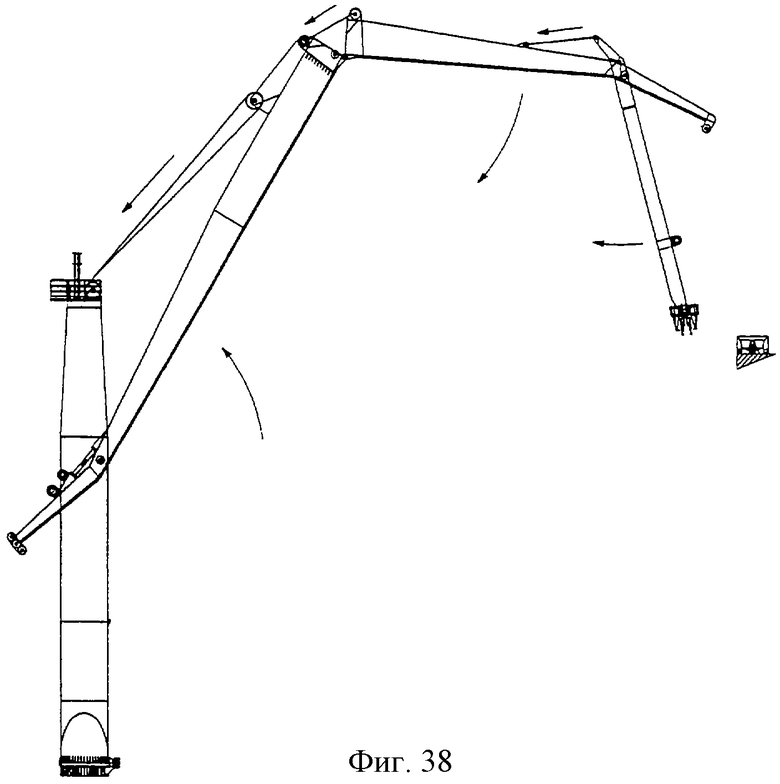
Нормальную процедуру разъединения проводят следующим образом: приводят в действие исполнительный механизм 78 подъема стрелы, так что внутренняя секция 34 стрелы 31 поднимается, прикладывают постоянное усилие к исполнительному механизму 41 сочленения стрелы (см. фиг.35), открывают соединительный элемент 45 (см. фиг.36), затем соединительный элемент 45 поднимают с разъединением при нахождении стрелы 31 в достаточно прямом положении (см. фиг.37 и 38), после чего судно немедленно отводят от морской платформы.
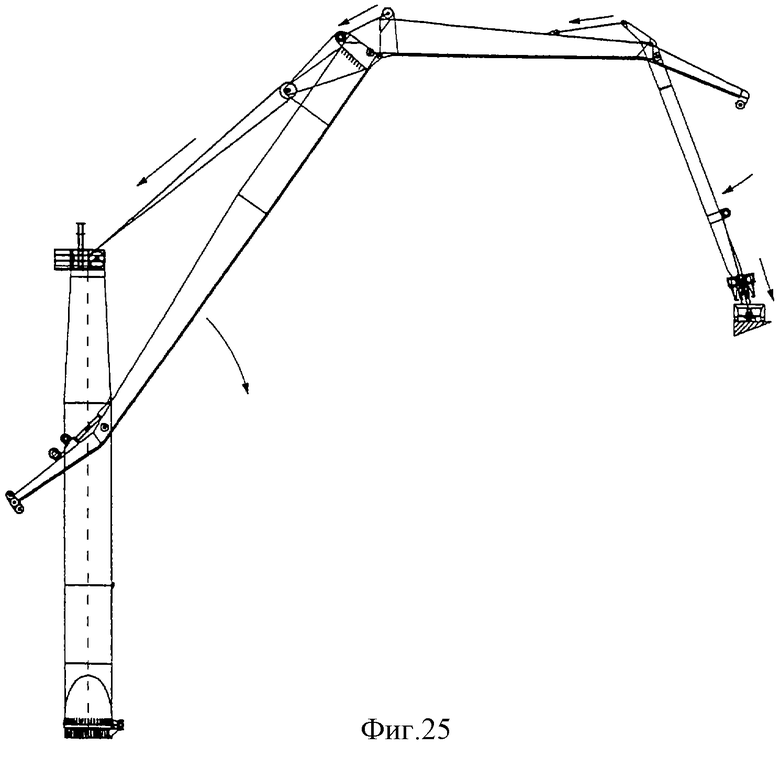
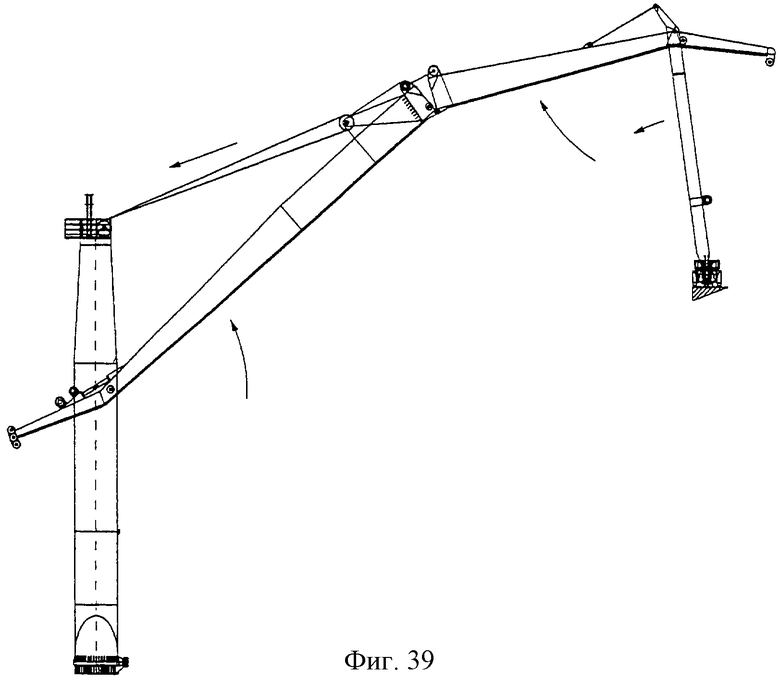
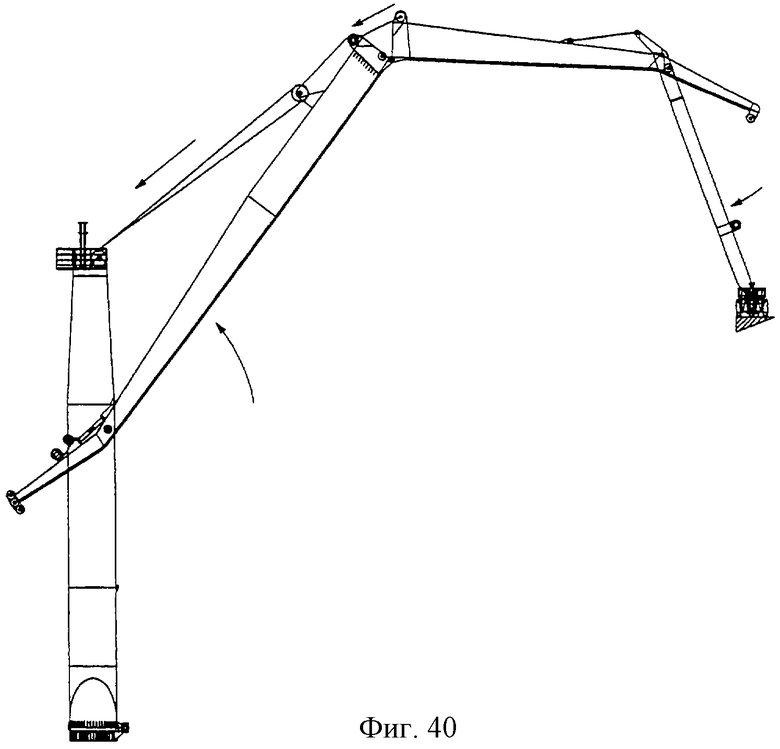
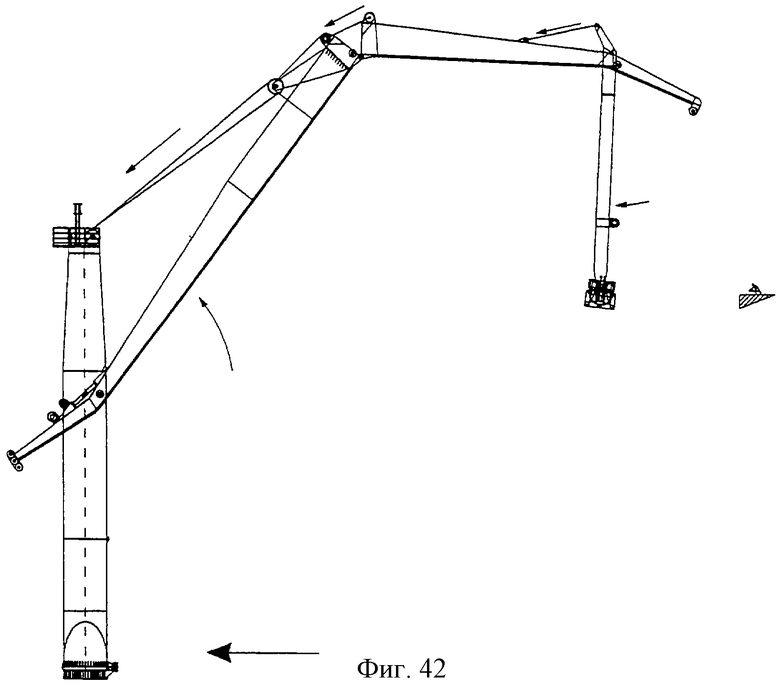
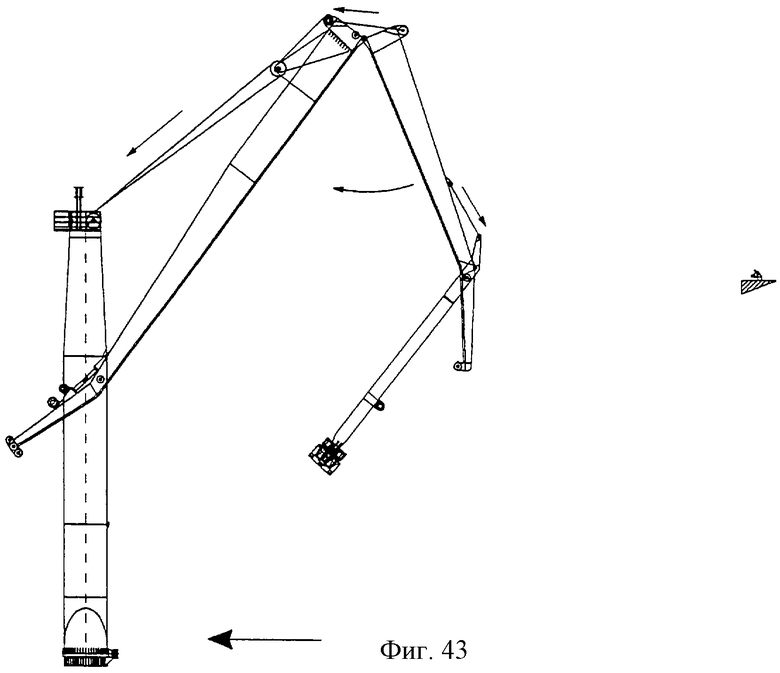
Аварийную процедуру быстрого разъединения проводят следующим образом: приводят в действие исполнительный механизм 78 подъема стрелы, так что внутренняя секция 34 стрелы 31 поднимается, прикладывают постоянное усилие к исполнительному механизму 41 сочленения стрелы (см. фиг.39 и 40) и открывают собачки 56 механизма быстрого разъединения 51 (см. фиг.41). Судно отходит в сторону от морской платформы одновременно с подъемом стрелы 31 при помощи исполнительного механизма 78 подъема и с приложением постоянного усилия к исполнительному механизму 42 рамы для демпфирования поворота рамы 32 при уходе основания 52 с морской платформы (см. фиг.42). Затем стрелу 31 складывают и систему приводят в уложенное положение на палубе судна (см. фиг. 43).
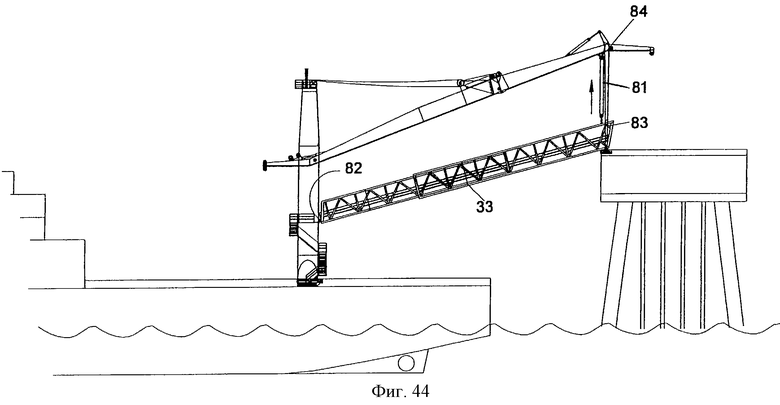
В приведенном описании переход 33 не упоминается, чтобы чрезмерно не усложнять описание. Переход 33 поднимают и опускают при помощи системы подъема и транспортировки 81 после установления соединения между судном и морской платформой при помощи стрелы 31 и рамы 32. На фиг.44-47 показано разъединение перехода 33, а процедура соединения перехода проводится аналогично, но в обратной последовательности.
На фиг.44 показан переход 33, подвешенный как на стойке 30 у ее внутреннего конца 82, так и в раме 32 у ее внешнего конца 83. При разъединении перехода 33 его внешний конец 83 соединяют с передвижным блоком или подвижной лебедкой 84, приспособленной для перемещения вдоль стрелы 31. Переход 33 поднимают с разъединением от рамы 32 и лебедка 84 перемещает переход 33 телескопически в направлении к стойке 30 (см. фиг.44).
После полного телескопического отведения перехода 33 лебедка 84 продолжает движение вдоль перехода 33 при прохождении точки ее подключения к переходу 33 до достижения своего конечного положения у стойки 30. В ходе этого процесса внешний конец перехода 33 опускается на палубу судна (см. фиг. 46). Наконец, внутренний конец перехода 33 также опускается на палубу судна.





Изобретение относится к судостроению. Поглощающая движение система транспортировки предназначена для перемещения людей и/или объектов между плавучим судном и установкой, например нефтяной морской платформой, причем плавучее судно и установка имеют относительное движение между собой. Система содержит стрелу, имеющую шарнирное соединение с судном, переход переменной длины, имеющий шарнирное соединение с судном, а также раму, которая соединяет вместе концы стрелы и переход на противоположном от шарнирного соединения конце. На установке предусмотрено шаровое седло. У внешнего конца перехода предусмотрен шаровой элемент, который приспособлен для входа в шаровое седло на установке таким образом, что соединение шаровой элемент - шаровое седло способно позволять трехосевое относительное перемещение между судном и установкой. Достигаются безопасность пешеходного соединения между плавучим судном и установкой, а также возможность перемещения грузов между ними. 5 с. и 22 з.п.ф-лы, 47 ил.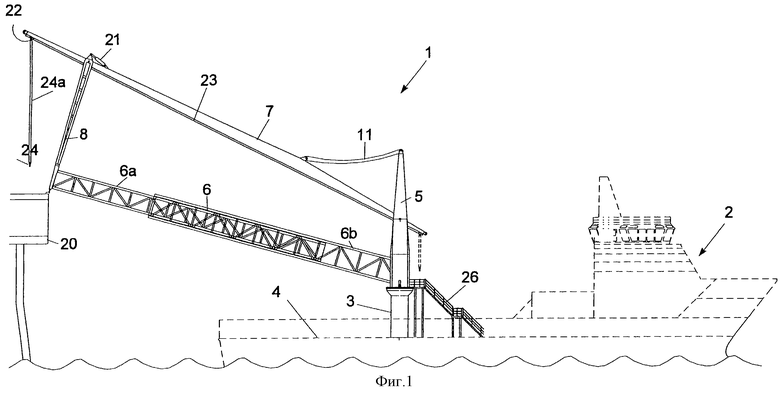
| US 4083072 А, 11.04.1978 | |||
| УСТАНОВКА ДЛЯ БИОЛОГИЧЕСКОЙ ОЧИСТКИ СТОЧНЫХ ВОД | 1999 |
|
RU2156743C1 |
| US 4169296 А, 02.10.1979 | |||
| SU 914402 А, 23.03.1982. | |||

