Изобретение относится к горной промышленности и предназначено для механизированного проведения горных выработок проходческими комбайнами без длительных остановок на наращивание ленточного конвейера.
Известен способ проведения горных выработок, включающий проходку передовой выработки, последующее расширение передовой выработки до контура проектной выработки в пределах зоны интенсивной трещиноватости пород и крепление выработки (авт. св. СССР 1265352, кл. Е 21 D 9/00, 1986).
К недостаткам известного способа относится то, что комбайн с передвижной платформой во время прохождения горной выработки перегружает отбитую массу на ленту конвейера и одновременно не может вытягивать шток гидроцилиндра передвижения. При этом передвижная платформа не может оставаться на месте, так как предохранительный клапан гидроблока не создает в штоковой полости гидроцилиндра передвижения необходимого давления для удержания передвижной платформы на месте и поддержания необходимого натяжения транспортерной ленты для работающего конвейера.
Известен также способ проведения горных выработок, включающий проведение горных выработок с помощью проходческого комбайна и связанного с ним передвижной платформой телескопического ленточного конвейера и выполнения в забое операций разрушения массива и уборки отбитой горной массы (патент РФ 2032077, кл. Е 21 D 9/00, Е 21 F 5/00, 1995).
Предназначенный для буровзрывного проведения горных выработок известный способ применен для механизированного проведения горных выработок проходческими комбайнами. Известный способ не допускает отставания на месте передвижной платформы, так как предохранительный клапан гидроблока не создает в штоковой полости гидроцилиндра передвижения давления рабочей жидкости, достаточного для удержания передвижной платформы на месте и поддержания необходимого натяжения транспортерной ленты для работающего конвейера по транспортированию горной массы.
Известна концевая станция ленточного конвейера, содержащая установленную с возможностью перемещения по основанию раму с продольными пазами, расположенную с возможностью перемещения в продольных пазах ось натяжного барабана, закрепленные на раме верхние и нижние роликоопоры для ленты, два параллельно расположенных и связанных с концами оси натяжного барабана регулировочных элемента, один из которых выполнен в виде винта, один конец которого установлен с возможностью перемещения на раме, и гидросистему (патент РФ 2002063, Е 21 F 13/08; B 65 G 42/00, 1993) - принято за прототип способа.
Однако существенным недостатком данной конструкции является то, что применение регулировочного винта для регулирования положения ленты на натяжном барабане не позволяет применить известное решение в случае постоянного движения концевой станции за проходческой машиной. Другой регулировочный элемент выполнен в виде силового цилиндра, внутренняя полость которого сообщена с гидросистемой, размещенной на раме, при этом другой конец винта шарнирно связан с осью натяжного барабана и ограничивает свободу регулировки. При подаче рабочей жидкости от маслостанции комбайна в штоковую полость гидроцилиндра передвижения секция движется вперед к неработающему по проходке комбайну. Натяжение тягово несущего органа усиливается и срабатывает аппаратура натяжения и часть ленты выбирается из телескопического конвейера до момента установления нижнего расчетного натяжения.
Наиболее близким к предложенному по технической сущности и достигаемому результату по устройству является механизм передвижения, одной стороной связанный с комбайном, а другой стороной с концевым барабаном телескопического ленточного конвейера, установленным на раме, и гидроцилиндры подъема с обоймами, гидроцилиндр механизма передвижения, одной стороной связанный с задней опорой основной рамы (патент РФ 2163972, кл. E 21 F 13/08, В 65 G 47/74, 2001) - принято за прототип устройства.
К недостаткам известного устройства относится ограниченная область действия передвижного перегрузочного пункта и жесткая привязка к лаве. В самом деле, передвижной перегрузочный пункт нормально действует в условиях привязки к лаве, когда сбрасывающая головка одного конвейера находится над концевой головкой другого конвейера. После полного перемещения тележки до упора в переднюю опору передвигают вперед основную раму, путем неоднократной раздвижки и сокращения гидроцилиндра толкателя до тех пор, пока не приблизится к задней опоре. При включении гидроцилиндра толкателя на раздвижку происходит зацепление собачки с зубчатой рейкой и задняя опора основной рамы перемещается вперед. Затем включают гидроцилиндр толкателя на сокращение и собачка выходит из зацепления с зубчатой рейкой. После полного сокращения гидроцилиндра толкателя собачка поворачивается на оси и наезжает на клин, не позволяя собачке взаимодействовать с зубчатой рейкой, а тележка свободно перемещается вперед со штрековым перегружателем.
Сущность способа управления передвижением проходческого комбайна заключается в разрушении массива комбайном с одновременной уборкой отбитой породы, перемещении комбайна и связанной с ним передвижной платформы, на которой установлен концевой барабан телескопического ленточного конвейера, при этом передвижная платформа соединена с комбайном гидроцилиндром передвижения, шток которого комбайн вытягивает при перемещении с одновременной погрузкой отбитой массы на ленту конвейера, при этом с помощью предохранительного клапана гидроблока создают в штоковой полости гидроцилиндра передвижения давление рабочей жидкости, достаточное для удержания передвижной платформы на месте и поддержания необходимого натяжения транспортерной ленты, а после полной вытяжки штока гидроцилиндра передвижения перемещают передвижную платформу на полный ход гидроцилиндра передвижения, подавая рабочую жидкость в штоковую полость гидроцилиндра передвижения, после чего автоматически прерывают подачу рабочей жидкости в штоковую полость гидроцилиндра от работающей маслостанции комбайна и без остановки комбайна операции повторяют, поддерживая необходимое натяжение ленты и периодически подтягивая передвижную платформу при работающем в автоматическом режиме гидроцилиндре передвижения и перемещая ее вслед за комбайном на ход телескопического механизма изменения длины.
Устройство для управления передвижением комбайна включает механизм передвижения, одной стороной связанный с комбайном, а другой - с задней опорой рамы передвижной платформы, на которой установлен концевой барабан ленточного телескопического конвейера, гидроцилиндры подъема с обоймами, механизм передвижения выполнен в виде гидроцилиндра передвижения, с помощью которого корпус комбайна шарнирно связан с передвижной платформой телескопического ленточного конвейера, при этом гидроцилиндр передвижения закреплен на передвижной платформе двойным шарниром с возможностью крепления на различной высоте, а также попеременного осуществления то удержания передвижной платформы на месте и создания необходимого натяжения ленты, то перемещения передвижной платформы к комбайну.
Технический результат предложенного решения заключается в удобстве обслуживания при подвигании концевого барабана под сбрасывающей головкой скребкового конвейера комбайна, центрировании ленты, снижении трудоемкости в эксплуатации, повышении эффективности работы, надежности, производительности.
Существенные признаки, влияющие па достигаемый технический результат, находятся в причинно-следственной связи с указанным техническим результатом.
Признак "передвижная платформа соединена с комбайном гидроцилиндром передвижения" является более удобным вариантом взаимодействия передвижной платформы корпуса проходческого комбайна в тот момент, когда передвижная платформа остается на месте, так как предохранительный клапан гидроблока создает в штоковой полости гидроцилиндра передвижения давление рабочей жидкости, достаточное для удержания передвижной платформы на месте и поддержания необходимого натяжения ленты для работающего конвейера по транспортированию горной массы.
Признак "шток гидроцилиндра передвижения комбайн вытягивает при перемещении с одновременной погрузкой отбитой массы на ленту конвейера, при этом с помощью предохранительного клапана гидроблока создают в штоковой полости гидроцилиндра передвижения давление рабочей жидкости, достаточное для удержания передвижной платформы на месте и поддержания необходимого натяжения транспортерной ленты" позволяет комбайну одновременно грузить отбитую горную массу и вытягивать шток гидроцилиндра передвижения, при этом передвижная платформа остается на месте, так как предохранительный клапан гидроблока создает в штоковой полости гидроцилиндра передвижения давление рабочей жидкости, достаточное для удержания платформы на месте и поддержания необходимого натяжения транспортерной ленты для работающего конвейера по транспортированию горной массы, то есть способствует выполнению изобретения.
Признак "после полной вытяжки штока гидроцилиндра передвижения перемещают передвижную платформу к комбайну на полный ход гидроцилиндра передвижения, подавая рабочую жидкость в штоковую полость гидроцилиндра передвижения" позволяет, как только полностью закончится вытяжка штока без остановки комбайна автоматически, если работает маслостанция комбайна, подавать рабочую жидкость в штоковую полость гидроцилиндра передвижения и передвижная платформа со скоростью более чем в 10 раз выше скорости передвижения комбайна перемещается к комбайну на полный ход штока в цилиндре, так как электроконтактный манометр при достижении максимальной силы натяжения транспортерной ленты включают лебедку телескопического механизма изменения длины конвейера для ослабления ленты. За время перемещения передвижной платформы к комбайну сила натяжения транспортерной ленты находится в допустимых пределах, это возможно за счет того, что барабан сматывает канат с сопротивлением, так как скорость сматывания каната меньше скорости принудительного вытягивания каната концевым барабаном при помощи гидроцилиндра передвижения. Признак необходим для выполнения изобретения.
Признак "после чего автоматически прерывают подачу рабочей жидкости в штоковую полость гидроцилиндра от работающей маслостанции комбайна и без остановки комбайна операции повторяют" позволяет автоматически прекратить подачу рабочей жидкости в штоковую полость гидроцилиндра от работающей насосной станции, таким образом после перемещения вперед на полный ход гидроцилиндра передвижения подача рабочей жидкости от маслостанции перекрывается, что отвечает цели изобретения.
Признак "механизм передвижения выполнен в виде гидроцилиндра передвижения, с помощью которого корпус комбайна шарнирно связан с передвижной платформой телескопического ленточного конвейера, который может быть закреплен на различной высоте передвижной платформы двойным шарниром" - признак, без выполнения которого функционирование устройства невозможно, так как высота расположения комбайна и передвижной платформы может быть различной при движении комбайна вниз или вверх, и в соответствии с этим на платформе закреплен кронштейн с выполненным рядом отверстий, в которые устанавливаются пальцы двойного шарнира. Двойной шарнир необходим, так как несовпадение может быть по двум плоскостям, например, по высоте и ширине. Передвижная платформа при работающем в автоматическом режиме гидроцилиндре передвижения периодически то остается на месте при вытягивании штока комбайном, то подтягивается к комбайну и не сдерживает работу комбайна на протяжении полного хода телескопического механизма изменения длины конвейера.
Предлагаемое изобретение иллюстрируется чертежами, представленными на фиг. 1-6.
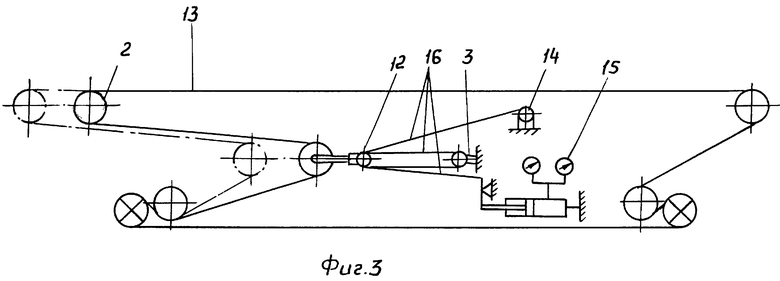
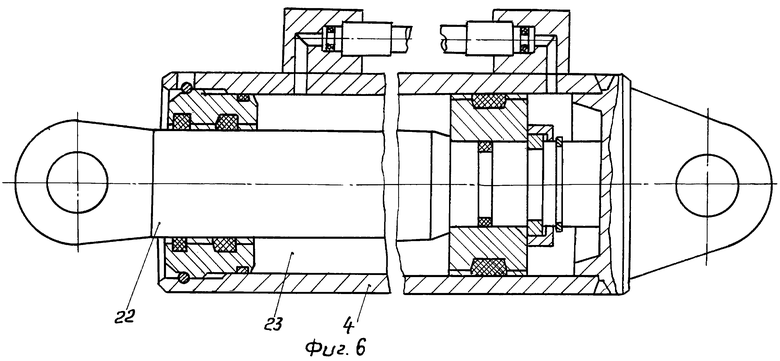
На фиг.1 изображен комбайн и связанная с ним гидроцилиндром передвижная платформа, вид сбоку; на фиг. 2 - то же, что на фиг.1 - вид сверху; на фиг.3 - схема ленточного телескопического конвейера; на фиг. 4 - место установки держателя концевого барабана и винта с гайкой; на фиг. 5 - вид сверху на винт с гайкой; на фиг.6 - продольный разрез гидроцилиндра передвижения.
Платформа передвижная 1 предназначена для крепления концевого барабана 2 ленточного телескопического проходческого конвейера 3, формирования желобчатой формы верхней ветви ленты, очистки ленты, местной регулировки концевого барабана в горизонтальной плоскости и шарнирного крепления гидроцилиндра передвижения 4. Платформа передвижная состоит из рамы 5, концевого барабана 2, лотка 6, кронштейна 7 для шарнирного крепления гидроцилиндра передвижения 4, держателей 8 для удержания концевого барабана, чистильщика ленты 9, и гидроблока 10 с предохранительным клапаном 11. Ленточный телескопический проходческий конвейер 3 состоит из концевого барабана 2, телескопического механизма изменения длины 12, транспортерной ленты 13, лебедки 14, электроконтактного манометра 15 и каната 16. На платформе имеются винт 17 с гайкой 18 для ручного центрирования ленты на концевом барабане 2. Опора подвижная 19 совместно с гидроцилиндрами подъема 20 и бокового смещения 21 предназначена для центрирования ленты на концевом барабане 2, подъема, опускания, бокового смещения и нивелирования платформы относительно почвы и бортов выработки. Гидроцилиндр передвижения 4 состоит из штока 22 штоковой полости 23. Платформа передвижная 1 соединяет проходческий комбайн 24 с ленточным телескопическим проходческим конвейером 3. Гидроблок 10 имеет предохранительный гидроклапан 11. Для крепления на различной высоте гидроцилиндра передвижения 4 спереди передвижной платформы 1 закреплен кронштейн 7 с выполненным рядом отверстий 25. Гидроцилиндр передвижения 4 двумя шарнирами 26, то есть имеет две оси вращения, может соединяться с кронштейном 7 передвижной платформы 1 на любой при необходимости высоте, используя отверстия 25.
Платформа передвижная 1 соединяет проходческий комбайн 24 с ленточным телескопическим проходческим конвейером 3, оборудованный телескопическим механизмом изменения длины 12. Комбайн 24 с передвижной платформой 1 во время прохождения выработки грузит отбитую горную массу на транспортерную ленту 13 конвейера 3. Одновременно комбайн вытягивает шток 22 гидроцилиндра передвижения 4. При этом передвижная платформа 1 остается на месте, так как предохранительный клапан 11 гидроблока 10 создает в штоковой полости 23 гидроцилиндра передвижения 4 давление рабочей жидкости, достаточное для удержания платформы передвижения 1 на месте и поддержания необходимого натяжения транспортерной ленты 13 для работающего конвейера 3. Как только полностью закончится вытяжка штока 22, без остановки комбайна 24, автоматически подается рабочая жидкость в штоковую полость 23 гидроцилиндра передвижения 4 и передвижная платформа 1 со скоростью, более чем в 10 раз превышающей скорость комбайна, перемещается на полный ход штока 22 в гидроцилиндре передвижения 4, и так как электроконтактный манометр 15 при достижении максимальной силы натяжения транспортерной ленты 13 включает лебедку 14 телескопического механизма изменения длины конвейера 12 для ослабления ленты 13. За время перемещения передвижной платформы 1 к комбайну 24 сила натяжения ленты 13 находится в допустимых пределах. Это возможно за счет того, что барабан лебедки 14 сматывает канат 16 с сопротивлением. После перемещения вперед передвижной платформы 1 на полный ход штока 22 гидроцилиндра 4, автоматически прекращается подача рабочей жидкости в штоковую полость 23 гидроцилиндра 4 от работающей маслостанции комбайна 24. Одновременно без остановки комбайна 24 начинается вытягивание штока 22, а предохранительный гидроклапан 11 гидроблока 10 в штоковой полости 23 гидроцилиндра 4 снова создает давление рабочей жидкости, достаточное для удержания передвижной платформы 1 на месте и поддержания необходимого натяжения транспортерной ленты 13. Во время работы комбайна 24 совместно с ленточным телескопическим конвейером 3, если это необходимо, можно обеспечить центрирование транспортерной лепты на концевом барабане изменением угла установки самого барабана при вращении винтов 17, которые установлены слева и справа рамы 5, или совместно работая гидроцилиндрами подъема и бокового смещения 21 подвижных опор 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ ГОРНОЙ ВЫРАБОТКИ | 2001 |
|
RU2209980C1 |
| ПЕРЕДВИЖНОЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1999 |
|
RU2163972C2 |
| Телескопический привод скребкового конвейера | 2002 |
|
RU2223211C2 |
| ШТРЕКОВЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1992 |
|
RU2044890C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1996 |
|
RU2134792C1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| ДВУХПОТОЧНАЯ СИСТЕМА ГИДРОПРИВОДА САМОХОДНОЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1996 |
|
RU2135775C1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ КОНВЕЙЕР | 1999 |
|
RU2164296C1 |
| ПЛАТФОРМА ДЛЯ СБОРКИ И ЗАКРЕПЛЕНИЯ УЗЛОВ УГОЛЬНОГО КОМБАЙНА | 1990 |
|
RU2012798C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ОЧИСТНОГО КОМБАЙНА | 2000 |
|
RU2171892C1 |



Изобретение относится к горной промышленности и предназначено для механизированного проведения горных выработок проходческими комбайнами без длительных остановок на наращивание ленточного конвейера. Технический результат заключается в удобстве обслуживания при подвигании концевого барабана под сбрасывающей головкой скребкового конвейера комбайна. При этом снижается трудоемкость в эксплуатации, повышается эффективность работы, надежность и производительность. Способ управления передвижением проходческого комбайна включает разрушение массива комбайном с одновременной уборкой отбитой породы и перемещение комбайна и связанной с ним передвижной платформы, на которой установлен концевой барабан телескопического ленточного конвейера. Передвижная платформа соединена с комбайном гидроцилиндром передвижения, шток которого комбайн вытягивает при перемещении с одновременной погрузкой отбитой массы на ленту конвейера. При этом с помощью предохранительного клапана гидроблока создают в штоковой полости гидроцилиндра передвижения давление рабочей жидкости, достаточное для удержания передвижной платформы на месте и поддержания необходимого натяжения транспортерной ленты, а после полной вытяжки штока гидроцилиндра передвижения перемещают передвижную платформу на полный ход гидроцилиндра передвижения, подавая рабочую жидкость в штоковую полость гидроцилиндра передвижения. Затем автоматически прерывают подачу рабочей жидкости в штоковую полость гидроцилиндра от работающей маслостанции комбайна и без остановки комбайна операции повторяют, поддерживая необходимое натяжение ленты и периодически подтягивая передвижную платформу при работающем в автоматическом режиме гидроцилиндре передвижения и перемещая ее вслед за комбайном на ход телескопического механизма изменения длины. Устройство для управления передвижением комбайна включает механизм передвижения, одной стороной связанный с комбайном, а другой - с задней опорой рамы передвижной платформы, на которой установлен концевой барабан ленточного телескопического конвейера, гидроцилиндры подъема с обоймами. Механизм передвижения выполнен в виде гидроцилиндра передвижения, с помощью которого корпус комбайна шарнирно связан с передвижной платформой телескопического ленточного конвейера. Гидроцилиндр передвижения закреплен на передвижной платформе двойным шарниром с возможностью крепления на различной высоте, а также попеременного осуществления то удержания передвижной платформы на месте и создания необходимого натяжения ленты, то перемещения передвижной платформы к комбайну. 2 с.п. ф-лы, 6 ил.
| СПОСОБ ПРОВЕДЕНИЯ ГОРНЫХ ВЫРАБОТОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032077C1 |
| Способ проведения горных выработок | 1985 |
|
SU1265352A1 |
| ПЕРЕДВИЖНОЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1999 |
|
RU2163972C2 |
| ШТРЕКОВЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1992 |
|
RU2044890C1 |
| RU 2002063 C1, 30.10.1993. | |||

