Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам, предназначенным для уборки плодов бахчевых культур.
Известен подборщик плодов бахчевых культур, включающий мотовило с дисками и лопастями, направляющий лоток и подъемный транспортер, в котором с целью уменьшения повреждения плодов каждая лопасть мотовила выполнена из двух шарнирно соединенных между собой звеньев, одно из которых шарнирно закреплено на диске мотовила и подпружинено; на диске мотовила установлен упор (SU, авторское свидетельство ( 713549. М.кл.2 А 01 D 45/00, A 01 D 57/00. Подборщик плодов бахчевых культур//А.Эм, Е.Ф.Вершинников, Х.К.Нуралиев и др. Заявлено 08.08.1975, опубликовано 05.02.1980).
К недостаткам конструкции подборщика относятся повреждение плодов в моменты взаимодействия лопасти мотовила с убираемым плодом.
Известен также подборщик плодов бахчевых культур, содержащий бесконечный транспортер с установленными на нем пальцами, в котором с целью уменьшения повреждений при подборе плодов различного размера и формы пальцы подпружинены и закреплены на транспортере шарнирно с шагом, близким к размеру наименьших плодов; шарнирно-подпружиненные пальцы в рабочей зоне покрыты эластичным материалом и на конце имеют грушевидное утолщение (SU, авторское свидетельство 397154, М. кл. A 01 D 45/00, А 01 D 51/00. Подборщик плодов бахчевых культур // Б.Г.Чечин, М.Ю.Топольский, Е.Г.Волков, В.А. Румянцев и др. Заявлено 21.09.1971, опубликовано 17.09.1973).
Недостатком подборщика при уборке плодов является их травмирование, низкая производительность и сложность конструкции.
Наиболее близким техническим решением по своей сущности к заявленному объекту является подборщик плодов, содержащий опорную раму, подъемник, выполненный в виде ряда направляющих и подающее устройство с поводками, в котором с целью увеличения полноты подбора и уменьшения повреждаемости плодов подающее устройство состоит из отдельных шарнирно закрепленных относительно рамы и направляющих бесконечных гибких элементов, поводки на которых закреплены с расположением между направляющими и наклонены в сторону движения гибких элементов (SU, авторское свидетельство 886803. М.кл.3 А 01 D 45/00. Подборщик плодов // В.И.Перепелица, В.Т.Протасов, В.В.Греждяну, С.Ф.Штельмах. Заявлено 22.12.1976, опубликовано 07.12.1981). Этот подборщик нами принят в качестве наиближайшего аналога.
Недостатком данного подборщика является сложность конструкции, низкая надежность подбора плодов, их повреждение в момент захвата и транспортирования.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - повышение уровня механизации при подборе разновеликих плодов бахчевых культур.
Технический результат - повышение производительности, снижение потерь при подборе разновеликих плодов и степени их травмирования.
Указанный технический результат достигается тем, что в известном подборщике плодов бахчевых культур, включающем смонтированные на мобильной раме наклонный лоток и над ним бесконечный транспортер с установленными на нем с утолщениями на концах пальцами, закрепленными на транспортере шарнирно шагом, близким к размеру наименьших плодов, согласно изобретению он снабжен шиной и контактирующими с ней лопастями, образованными стропами и оппозитно установленными пальцами, каждому из которых придана Г-образная форма и выполненного из тонкостенного элемента, например трубы, при этом на нижних срезах вертикальных участков упомянутых пальцев закреплены утолщения в виде шаров, а выше их с возможностью дискретного смещения по высоте пальцев размещена группа строп и пара шарнирных соединений с ветвями транспортера, на горизонтальных полках пальцев с взаимным удалением размещены сопряженные с шиной опоры качений, при этом концы горизонтальных участков каждой пары пальцев зафиксированы соединительной муфтой; шина на мобильной раме размещена параллельно наклонному лотку, а ее концевым участкам придана дугообразная форма; каждая стропа образована резинотканевым жгутом, концы которого снабжены монтажными крюками, соединенные шарнирно посредством переходных колец с парой пальцев лопасти; каждая стропа образована канатом, армированным слоем из упругого материала, при этом концы каната запасованы в отверстиях переходных колец, соединенных шарнирно с парой пальцев лопасти; каждая стропа образована канатом, один конец или оба конца которого соединены посредством упругих элементов с переходными кольцами, соединенными шарнирно с парой пальцев лопасти; положение переходных колец на стойках лопасти зафиксировано быстросъемными U-образными фиксаторами; каждая опора качения выполнена, например, в виде однорядного шарикоподшипника разовой смазки с сферическим наружным кольцом, внутреннее кольцо которого размещено на конусной разрезной втулке; каждый шарнир соединения лопасти с ветвями транспортера выполнен в виде охватывающей палец втулки и зафиксирован на нем посредством штифта, при этом в приливе втулки, ортогонально к ее оси, размещена отъемная ось для шарнирного соединения со звеном втулочно-роликовой цепи ветви транспортера.
Изобретение поясняется чертежами.
На фиг. 1 схематично изображен подборщик плодов бахчевых культур, вид сбоку.
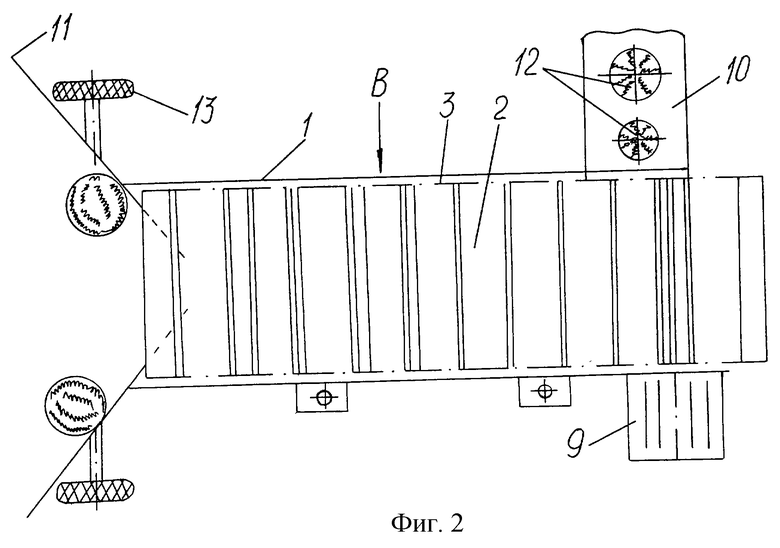
На фиг.2 - то же, вид в плане.
На фиг. 3 - сечение А-А на фиг.1, момент захвата и начало перекатывания разновеликих плодов лопастью подборщика.
На фиг. 4 - сечение Б-Б на фиг.1, перемещение стропами разновеликих плодов по поверхности наклонного лотка.
На фиг. 5 - вид В на фиг.2, представлен процесс взаимодействия упругих строп с разновеликими плодами при перемещении по наклонной плоскости лотка.
На фиг. 6 - сечение Г-Г на фиг.3, вариант выполнения стропы из упругого резинотканевого материала и его размещение на пальцах.
На фиг. 7 - сечение Г-Г на фиг.3, вариант выполнения стропы из каната, армированного слоем упругого материала.
На фиг. 8 - сечение Г-Г на фиг.3, вариант выполнения стропы из каната и его размещение на пальцах посредством упругого элемента (пружины растяжения).
На фиг. 9 - сечение Д-Д на фиг.5, средства фиксации стропы на пальцах выше утолщения.
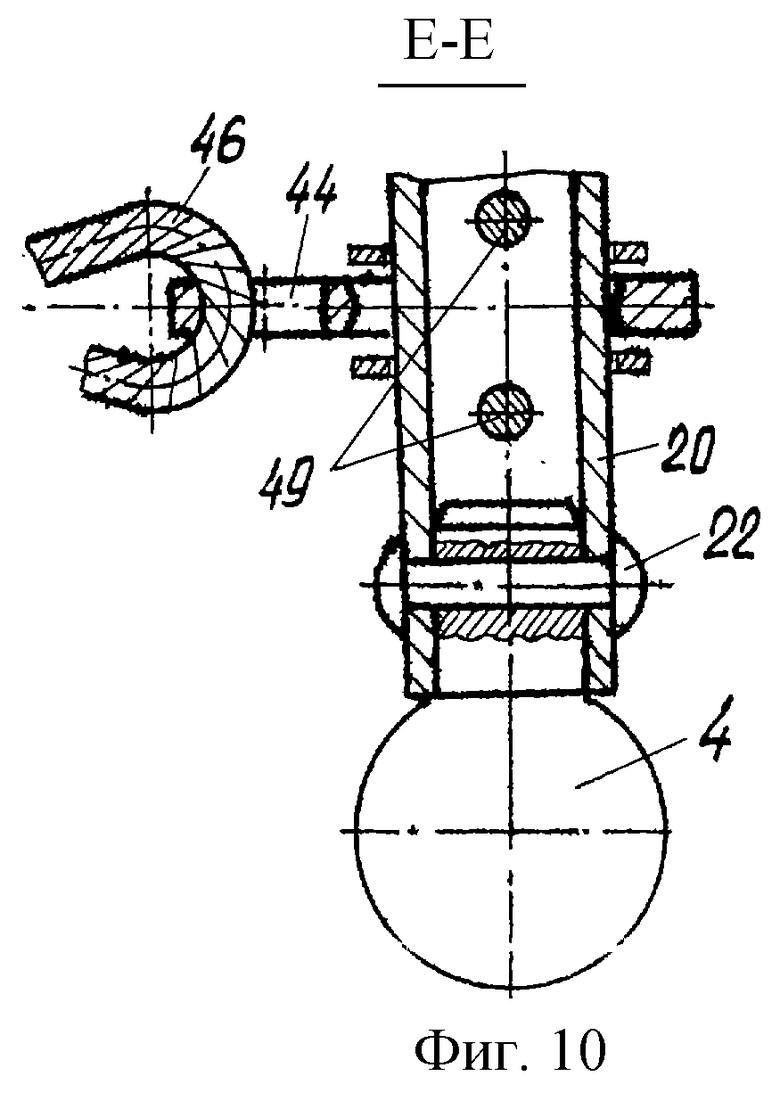
На фиг. 10 - сечение Е-Е на фиг.5, положение утолщения в виде шара на нижнем срезе пальца.
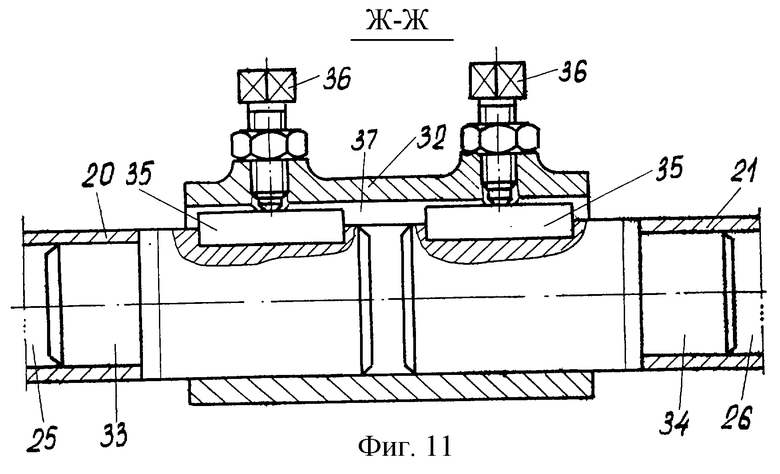
На фиг. 11 - сечение Ж-Ж на фиг.11, диаметральный разрез соединительной муфты горизонтальных полок Г-образных пальцев лопасти.
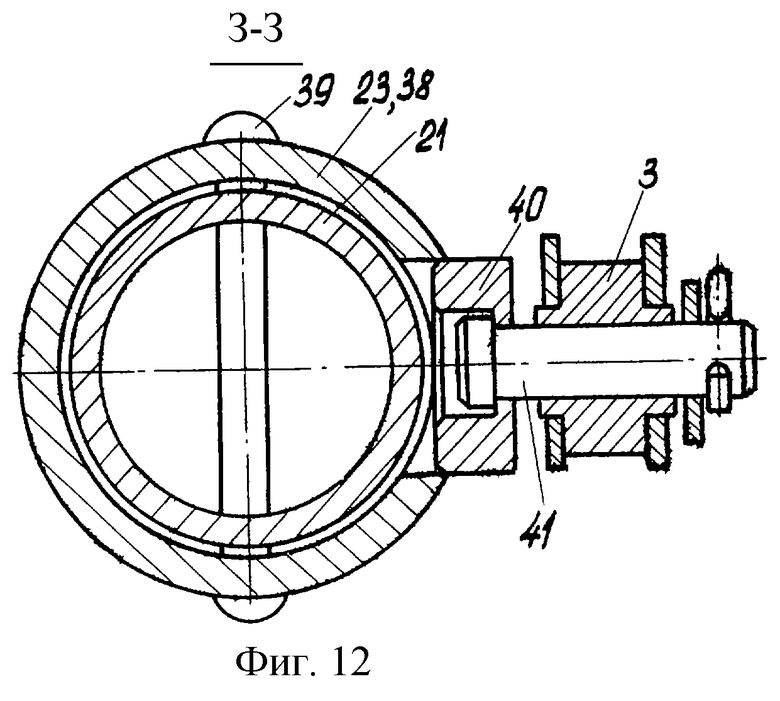
На фиг. 12 - сечение З-З на фиг.3, сопряжение звена втулочно-роликовой цепи с шарнирным соединением левого пальца.
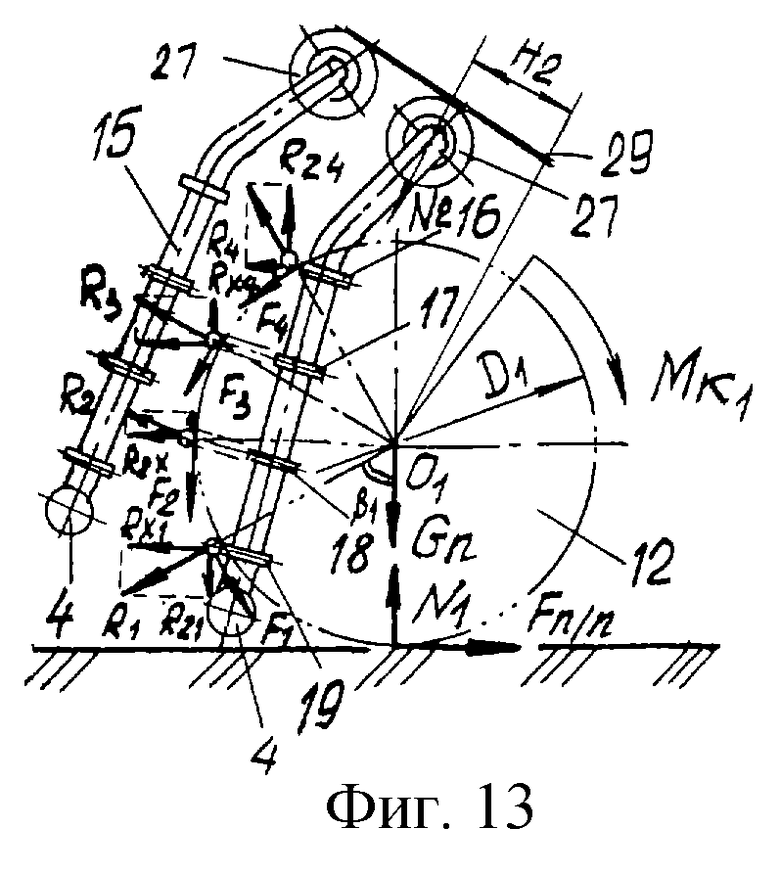
На фиг.13 - момент взаимодействия лопасти с подбираемым плодом, летящим на поверхности убираемой полосы бахчевой плантации.
На фиг. 14 - изобретен процесс взаимодействия нижней стропы с поверхностью плода, например арбуза, лежащего на поверхности убираемой полосы, вид сбоку (точка контакта выше экваториальной плоскости и дальше поперечно-меридиальной плоскости).
На фиг.15 - то же, при касании нижней стропы с самой верхней точкой плода (на полосе).
На фиг.16 - представлена динамика сил, действующая на поверхность плода от воздействия нижней стропы лопасти в момент контакта за меридиальной плоскостью.
На фиг. 17 - показан процесс взаимодействия нижней стропы ниже экваториальной плоскости поверхности плода и его перекатывание по поверхности поля.
На фиг.18 - схема сил и процесс перемещения (качения и волочения) плода стропами лопасти по наклонной плоскости наклонного лотка подборщика плодов.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Подборщик плодов бахчевых культур (см. фиг.1 и 2) содержит смонтированные на мобильной раме 1 наклонный лоток 2 и над ним бесконечный транспортер 3 с установленными на нем с утолщениями 4 на концах пальцами 5. Пальцы 5 шарнирно закреплены на транспортере 3 с шагом, близким к размеру наименьших плодов.
Мобильная рама 1 опирается при работе подборщика на опорные колеса 6. Бесконечный транспортер 3 включает ведущий вал 7 с парой звездочек под втулочно-роликовые цепи, ведомый вал 8 с аналогичными по конструкции звездочками и привод транспортера в виде высокомоментного гидромотора 9.
Верхний срез наклонного лотка 2 сопряжен с поперечным транспортером 10.
Спереди мобильной рамы 1 размещен валкователь 11 плодов 12 бахчевых культур. Валкователь 11 соединен шарнирно с рамой 1 и снабжен собственными опорными колесами 13.
Подборщик снабжен шиной 14 и контактирующими с ней лопастями 15. Лопасти 15 (см. фиг.3) образованы стропами 16, 17, 18 и 19 и оппозитно установленными пальцами 20 и 21. Пальцам 20 и 21 придана Г-образная форма. Пальцы выполнены из тонкостенных полых элементов, например из тонкостенных труб диаметром 3/4"-1". На нижних срезах вертикальных участков пальцев 20 и 21 закреплены утолщения 4 в виде шаров. Утолщения 4 на нижних срезах пальцев 20 и 21 закреплены штифтами 22 (см. фиг.9 и 10). Утолщениями 4 исключается механическое повреждение плодов 12. Выше утолщений 4 на пальцах 20 и 21 размещена с возможностью дискретного смещения по их высоте группа строп 16-19 и пара шарнирных соединений 23 и 24 с ветвями бесконечного транспортера 3 (см. фиг.3, 5 и 12).
На горизонтальных полках 25 и 26 пальцев 20 и 21 с взаимным удалением размещены сопряженные с шиной 14 опоры качений 27 и 28 (см. фиг.3 и 5). Шина 14 на мобильной раме 1 размещена параллельно наклонному лотку 2. Концевым участкам 29 и 30 (фиг.1) шины 14 придана дугообразная форма, обеспечивающая надежный захват разновеликих плодов 12. Каждая опора качения 27 и 28 выполнена, например, в виде однорядного шарикоподшипника разовой смазки с сферическим наружным кольцом. Опоры качения 27 и 28 на горизонтальных полках 25 и 26 зафиксированы посредством разрезных конусных втулок 31 (фиг.3).
Концы горизонтальных участков 25 и 26 каждой пары пальцев 20 и 21 зафиксированы соединительной муфтой 32 (фиг.3 и 11). Для этого в концы полых труб пальцев 20 и 21 вварены цапфы 33 и 34. Каждая цапфа 33 (34) имеет шпоночный паз для установки призматических шпонок 35. Соединительная муфта 32 в виде втулки имеет два прилива с резьбовыми отверстиями для установки опорных болтов 36. В полости втулки муфты 32 выполнен продольный паз 37.
Каждый шарнир 23 (24) соединения лопасти 15 с ветвями бесконечного транспортера 3 (см. фиг.3 и 12) выполнен в виде охватывающей палец 20 (21) втулки 38 и зафиксирован на нем посредством штифта 39. В приливе 40 втулки 38 ортогонально к ее оси симметрии размещена отъемная ось 41 для шарнирного соединения со звеном втулочно-роликовой цепи ветви транспортера 3.
Каждая стропа 16 (17-19) (фиг. 3, 4, 6-8) образована резинотканевым жгутом 42. Концы жгута 42 снабжены монтажными крюками 43. Крюки 43 шарнирно соединены посредством переходных колец 44 и 45 с парой пальцев 20 и 21 лопасти 15 (см. фиг.6).
Как вариант конструктивного исполнения каждая стропа 16 (17-19) образована канатом 46, армированным слоем 47 из упругого материала. Концы каната 46 запасованы в отверстиях переходных колец 44 и 45, соединенных шарнирно с парой пальцев 20 и 21 лопасти 15 (cм. фиг.7).
Другой вариант исполнения строп 16-19 предусматривает, что стропа 16(17-19) образована канатом 46, один конец или оба его конца соединены посредством упругих элементов 48 с переходными кольцами 44 (45). Кольца 44 и 45 соединены шарнирно с пальцами 20 и 21 лопасти 15 (см. фиг.8) посредством быстросъемных U-образных фиксаторов 49 (см. фиг.9 и 10).
Подборщик плодов бахчевых культур работает следующим образом.
После ручной выборки товарных плодов для поставки на рынок на бахчевом поле остаются разновеликие плоды, хаотично размещенные по длине убираемой полосы. При движении подборщика беспорядочно лежащие плоды на поверхности поля валкователем 11 сдвигаются к продольной оси подборщика. Опорные колеса 6 максимально приближают к поверхности поля нижний конец Vтр наклонного лотка 2. Скорость Vтр транспортера 3 должна быть больше поступательной скорости подборщика Vп на обратную величину coaα где α - угол наклона лотка 2 к горизонту, т.е. Vтр = (1/cosα)Vп, и строго синхронизирована со скоростью агрегатируемого трактора.
При включенном гидромоторе 9 получает привод ведущий вал 7 бесконечного транспортера 3. Вращением звездочек вала 7 ветвям транспортера 3 придается поступательное движение по отношению к мобильной раме 1 и относительное движение к поверхности почвы. В нижней части рамы 1 опоры качений 27 и 28 Г-образных пальцев 20 и 21 подходят (приближаются) к концевому участку 29 шины 14. Лопасть 15 последовательно занимает положения, изображенные на фиг. 13. Утолщения 4 в виде шаров на нижних концах пальцев 20 и 21 исключают повреждения подбираемых плодов 12 при подаче их со смещением от продольной оси симметрии валкователя 11. Каждая лопасть 15 через стропы 16-19 воздействует на поверхность плода 12 следующими усилиями:
R1, R2, R3, R4 - реакции давлений строп 16-19 на поверхность плода 12;
F1, F2, F3, F4 - сила трения строп 16-19 о поверхность подбираемого плода;
Gп - сила веса плода;
N1 - реакция давления плода на поверхность почвы убираемой полосы;
Fп/п - сила трения (скольжения) (перемещения) плода о поверхность почвы;
Mк1 - момент сопротивления качению плода 12 по поверхности поля,
N2 - реакция давления опор качений 27 и 28 на поверхность шины 14.
Приняв для упрощения расчетов плод 12 в качестве шара диаметром D1, можно составить уравнение моментов относительно его геометрического центра 01:
где β - угол между вертикалью и заданным радиус-вектором в точке контакта стропы (16, 17, 18 и 19);
H2 - плечо, определяемое из графика расчетной схемы.
Анализ уравнения (1) показывает, что для надежного захвата плодов наименьшего диаметра хотя бы одна из строп (19) при контакте с плодом 12 должна быть ниже экваториальной плоскости на величину 1/3-1/4 радиуса плода (D/2).
При взаимодействии нижней стропы 19 с поверхностью плода 12 в т.А, размещенной выше экваториальной плоскости а-а' и дальше за меридиальной плоскостью б-б', на плод 12 воздействуют следующие силы:
R1 - реакция давления стропы 19 на поверхность плода 12;
F1 - сила трения (скольжения) стропы 12 о поверхность плода 12;
Gп - сила веса плода 12;
N1 - реакция давления плода 12 на поверхность почвы;
Mк1 - момент сопротивления качения плода по поверхности почвы;
Fп/п - сила трения скольжения плода о поверхность почвы.
Уравнение моментов сил (2) относительно т.01 показывает, что
контакт стропы 19 в т.А приведет к незначительному повороту плода вокруг т. 01 на угол Δβ1, при этом стропа 19 достигнет полюса в т.Б плода 12, а дальше будет препятствовать вкатыванию плода 12 на нижний наклонный конец лотка 2.
Рассмотрим еще один случай взаимодействия строп 19-18-17-16 лопасти 15 подборщика с убираемыми плодами 12.
При взаимодействии нижней стропы 19 с поверхностью плода 12 на него воздействуют следующие силы (см. фиг.15):
R1 - реакция стропы 19 о поверхность плода 12. Реакция R1 направлена по радиусу шара и строго вертикально в меридиальной плоскости (в плоскости наибольшего круга);
Gп - сила веса плода. Она приложена в центре масс 01 плода 12 и направлена строго вниз;
N1 - реакция плода о поверхность поля.
Плод 12 под воздействием указанных сил находится в состоянии покоя: ∑Z(01) = O; R1 - Gп + N1 = 0.
Величина силы давления плода 12 на почву равна
N1 = Gп + R1. (3)
Качение плода не происходит. Стропа 19 соскальзывает с полюса в т.В и перемещается вместе с лопастью 15 в сторону лотка 2.
Рассмотрим еще один случай взаимодействия лопасти 15 с поверхностью подбираемого плода 12 независимо от величины его диаметра Д1 (Д2, Д3, Д4) (см. фиг.3 и 16).
Контакт нижней стропы 17 лопасти 15 в т.С (см. фиг.16) выше экваториальной плоскости а-а' и за меридиальной плоскостью б-б' приводит к тому, что на плод 12 одновременно воздействуют следующие силы:
Мк1 - момент сопротивления качению плода, направленный на отталкивание плода от лотка 2;
Gп - сила веса плода;
Fп/п - сила трения скольжения плода о поверхность почвы;
R1 - реакция стропы 19 при контакте с поверхностью плода 12;
Fп/ст - сила трения скольжения плода о поверхность нижней стропы 19 лопасти 15;
N1 - реакция почвы от давления плода 12 на почву.
Уравнение моментов сил относительно т.01
показывает, что это воздействие Т лопасти 15 способствует захвату и перемещению (перекатыванию) плода на поверхность наклонного лотка 2.
Рассмотрим воздействие нижней стропы 19 лопасти 15 с поверхностью плода 12 в т. Е, расположенной ниже экваториальной плоскости а-а' и дальше меридиальной плоскости б-б' (см. фиг.17).
Воздействие лопасти 15 усилием Т приводит к образованию следующих реакций и сил:
Мк1 - момент сопротивления качению плода;
Gп - сила веса плода;
N1 - реакция плода о поверхность поля;
Fп/п - сила трения скольжения о поверхность поля;
R1 - реакция давления стропы 19 о поверхность плода;
Fп/ст - сила трения стропы 19 о поверхность плода 12.
Равновесное положение плода 12 в момент взаимодействия с лопастью 15
При таком взаимодействии лопасти 15 с плодом 12 последний находится в состоянии покоя и при встрече с нижним концом наклонного лотка 2 плавно вкатывается на его нижний конец. Разница в скоростях вкатывания плода 12 и поступательной скорости подборщика не превышает 3-5%. По этой причине плод 12 плавно вкатывается на лоток 2.
При вкатывании плода стропами 15-17-18-19 на поверхность наклонного лотка 2 последний усилием T перемещается (скользит) по поверхности лотка 2, т.к. сила трения скольжения плода о поверхность лотка Fп/к меньше сил трения F1; F2; F3 и F4 и момента сопротивления качения Мк2.
При достижении верхнего среза на наклонном лотке плоды 12 скатываются на поверхность поперечного транспортера 10. Последним плоды 10 загружаются в кузов следующего параллельным курсом автомобиля или тракторной тележки.
Таким образом стропами 16-19 лопастей производится взаимодействие с разновеликими подбираемыми плодами, их захват и перемещение по наклонному лотку. Описанная конструкция строп 16-19 исключает механическое повреждение плодов 12 и обеспечивает полноту подбора выращенного урожая.
Повышение производительности подборщика достигнуто за счет увеличения поступательной скорости и исключения ударного воздействия лопастей 15 на поверхность плодов 12.2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2001 |
|
RU2188568C1 |
| ПОДБОРЩИК ПЛОДОВ | 2005 |
|
RU2299552C1 |
| ПОДБОРЩИК-ПОГРУЗЧИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2006 |
|
RU2328105C1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ КОЖУРЫ С ПОВЕРХНОСТИ ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР И КОРНЕКЛУБНЕПЛОДОВ | 2002 |
|
RU2221465C2 |
| ПЛОДОУБОРОЧНЫЙ АГРЕГАТ | 2008 |
|
RU2360398C1 |
| ПОДБОРЩИК-ПОГРУЗЧИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2007 |
|
RU2332833C1 |
| ПОДБОРЩИК-ПОГРУЗЧИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2007 |
|
RU2343684C1 |
| БАРАБАННЫЙ ПОДБОРЩИК-ПОГРУЗЧИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2007 |
|
RU2333630C1 |
| БАРАБАННЫЙ ПОДБОРЩИК-ПОГРУЗЧИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2008 |
|
RU2373685C1 |
| ПОДБОРЩИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2004 |
|
RU2262224C1 |












Подборщик содержит смонтированные на мобильной раме наклонный лоток и над ним бесконечный транспортер с установленными на нем с утолщениями на концах пальцами, закрепленными на транспортере шарнирно с шагом, близким к размеру наименьших плодов. Подборщик также имеет шину и контактирующие с ней лопасти. Лопасти образованы стропами и оппозитно установленными пальцами. Каждому пальцу придана Г-образная форма. Палец выполнен из тонкостенной трубы, на нижних срезах вертикальных участков упомянутых пальцев закреплены утолщения в виде шаров. Выше утолщений-шаров размещены с возможностью дискретного смещения по высоте пальцев группа строп и пара шарнирных соединений с ветвями транспортера. На горизонтальных полках пальцев с взаимным удалением размещены сопряженные с шиной опоры качения. Концы горизонтальных участков каждой пары пальцев зафиксированы соединительной муфтой. Повышается производительность, снижаются потери при подборе плодов и степень их травмирования. 7 з.п. ф-лы, 18 ил.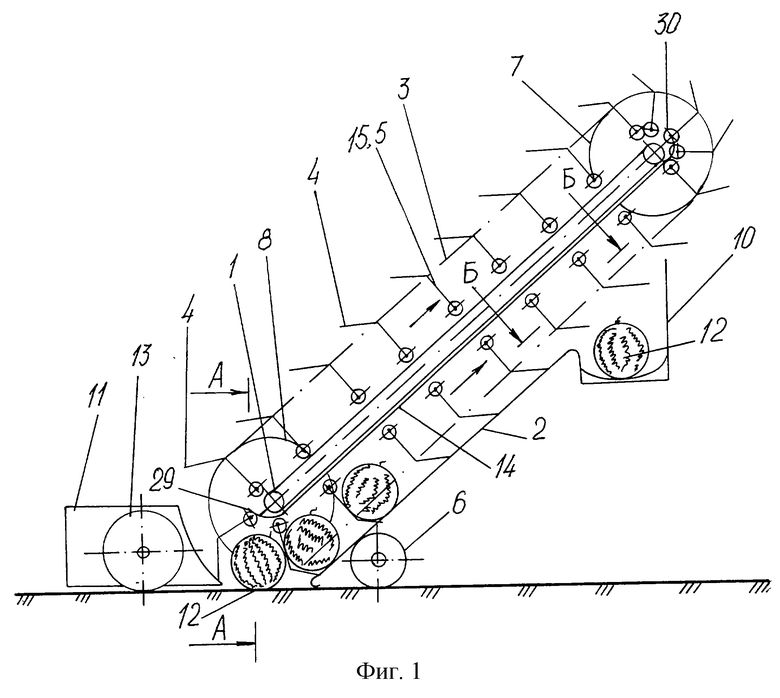
| Подборщик плодов | 1976 |
|
SU886803A1 |
| Машина для уборки плодов бахчевых культур | 1978 |
|
SU731919A1 |
| ПОДБОРЩИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 0 |
|
SU397154A1 |
| Подборщик плодов бахчевых культур | 1975 |
|
SU713549A1 |
| ПОДБОРЩИК ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 0 |
|
SU387653A1 |
