Предлагаемая автоматизированная система управления вооружением (АСУВ) относится к военной технике, а более конкретно к АСУВ, устанавливаемым на подвижных объектах: танках, БМП, БТР, судах, вертолетах и др. Подобные АСУВ позволяют автоматизировать процессы учета условий стрельбы, определения углов прицеливания и бокового упреждения, а также введения поправок в положение вооружения в момент выстрела.
Известны АСУВ танков первого послевоенного поколения Т-55 и Т-62 (см., например, "Руководство по материальной части и эксплуатации танка Т-55". Воениздат, М., 1965 г.). Каждая из АСУВ этих танков содержит пульт управления, автоматизированные приводы наведения орудия в вертикальной и горизонтальной плоскостях с блоком их включения и стабилизатором вооружения. Эффективность этих систем достаточно высока. Она обеспечивается введением автоматизированных приводов наведения орудия в двух плоскостях. Достигаемая вероятность попадания при этом не ниже 50%.
Однако для этих систем характерны недостатки. При их применении в пустынной, горно-пустынной и прибрежных местностях точность стрельбы всеми типами снарядов может существенно (до 1 т.д. и более) изменяться. Это объясняется тем, что в указанных районах вследствие высокой температуры нагрева (до 60 градусов) подстилающей поверхности над ней возникают мощные восходящие воздушные потоки (см. , например, Савкин Л.С., Лебедев Б.Д. Метеорология и стрельба артиллерии. М., Воениздат, 1974, с. 10-14), отклоняющие снаряды в полете по высоте от точки прицеливания.
Кроме того, измерение дальности в этой АСУВ до цели производится с помощью дальномерных шкал, что обусловливает большую погрешность (более 10% от измеренной дальности) ее измерения, а следовательно, и погрешность в определении угла прицеливания. Поэтому при стрельбе из танков Т-55, Т-62 вероятность попадания, как правило, не превышает 50%, а дальность эффективного огня состаляет лишь 1400-1600 м.
Известна также автоматизированная система управления вооружением танка Т-80Б (см. , например. Танк Т-80Б. ТО и ИЭ. Кн.1. М., Воениздат, 1984, с. 46-95). Эта система по технической сути и существенным признакам является наиболее близкой к заявляемой и принята за ее прототип. Одновременно она является базовым объектом предлагаемой системы и содержит последовательно соединенные пульт управления, прицел, блок суммирования и привод наведения орудия, баллистический вычислитель, выход которого подключен ко второму входу блока суммирования, блок ручных поправок, выходы которого по количеству поправок подключены к соответствующим входам баллистического вычислителя, датчик баллистики боеприпаса, лазерный дальномер и датчик ветра, выход каждого из которых подключен соответственно к первому, второму и третьему входам баллистического вычислителя.
Эффективность этой АСУВ по сравнению с предшествующей существенно возросла. Дальность эффективного огня увеличилась до 2200-2500 м, что достигнуто прежде всего за счет реализации независимой линии прицеливания и автоматического ввода основных поправок. Это потребовало введения в АСУВ ряда дополнительных элементов, например баллистического вычислителя, блока ручных поправок, датчика ветра, лазерного дальномера, прицела со стабилизатором линии прицеливания и датчиком баллистики и др. Введенные элементы позволили учесть ряд поправок при стрельбе, за исключением поправки на отклонение снаряда по высоте от точки прицеливания при его полете в условиях восходящего (нисходящего) воздушного потока, которое может составить при стрельбе всеми типами снарядов до 0,4 т.д. и более. По опыту боевых действий в Афганистане и Чечне это отклонение из-за мощных вертикальных воздушных потоков, характерных для горных и пустынных районов, может достигать еще большей величины.
Задачей настоящего изобретения является повышение эффективности АСУВ и устранение вышеперечисленных недостатков.
Указанная задача достигается тем, что в АСУВ установлены последовательно соединенные датчик скорости вертикального воздушного потока, первый квадратор, масштабирующий блок, блок умножения и согласующее устройство, выход которого подключен к третьему входу блока суммирования, а также установлены блок деления, первый и второй входы которого соединены со вторыми выходами соответственно лазерного дальномера и датчика баллистики боеприпаса, и второй квадратор, вход которого соединен с выходом блока деления, а выход - со вторым входом блока умножения, при этом датчик скорости вертикального воздушного потока электрически соединен через ключ со вторыми выходами соответственно датчика ветра и пульта управления.
Введение новых элементов и связей позволяет получить новую информацию об условиях стрельбы (о скорости вертикального воздушного потока), что обеспечивает повышение эффективности АСУВ, в частности, путем увеличения точности определения и установки угла прицеливания орудия.
Предлагаемое техническое решение поясняется чертежом, на котором показаны взаимное расположение и связи элементов предлагаемой АСУВ и приняты следующие обозначения:
1 - пульт управления (ПУ),
2 - прицел (Пр),
3 - блок суммирования (С),
4 - привод вертикального наведения (ПВН),
5 - орудие(О),
6 - блок ручных поправок (БРП),
7 - баллистический вычислитель (БВ),
8 - ключ (Кл),
9 - датчик скорости вертикального воздушного потока (ДВП),
10 - датчик ветра (ДВ),
11 - лазерный дальномер (ЛД),
12 - датчик баллистики (ДБ),
13 - согласующее устройство (СУ),
14 - первый квадратор (К1),
15 - блок деления (БД),
16 - второй квадратор (К2),
17 - блок умножения (БУ),
18 - масштабирующий блок (МБ).
Блоки 1-7, 10-12 являются штатными блоками прототипа и выполняют те же функции. Ключ 8 выполнен таким образом, что обеспечивает включение блока 9 при включении и срабатывании датчика ветра 10. Включение блока 9 возможно и с пульта управления 1, что необходимо при неисправном блоке 10, при контроле и настройке АСУВ. Датчик скорости вертикального воздушного потока 9 устанавливается таким образом, чтобы его измерительная ось занимала вертикальное положение во время измерения. Согласующее устройство 13 выполнено так, что согласует электрический сигнал, поступающий с блока 17, с рабочими характеристиками блока суммирования 3 и привода вертикального наведения орудия 4. Первый квадратор 14 обеспечивает возведение значения поданного на него сигнала с блока 9 в квадратную степень и его подачу на вход блока 18, который обеспечивает получение сигнала, соответствующего половине значения ускорения снаряда (а/2), которое он приобретает под действием вертикального воздушного потока. Его значение определяется выражением:
а/2=СxρS/4m, (1)
где Сх - коэффициент сопротивления снаряда в вертикальной плоскости;
ρ - плотность воздуха;
S - характерная площадь снаряда;
m - масса снаряда (см., например, Неупокоев Ф.К. "Стрельба зенитными ракетами". M., Воениздат, 1970, с. 99-121).
Блок 15 представляет собой делитель сигнала, поступающего с лазерного дальномера 11, на сигнал с датчика баллистики 12, реализуя алгоритм:
tп=Дц/Vo, (2)
где tп - время полета снаряда;
Дц - дальность до цели;
Vo - скорость полета снаряда.
Второй квадратор 16 обеспечивает возведение в квадратную степень значение сигнала, соответствующего tп, который подается на него с выхода блока 15. С выхода блока 16 сигнал поступает на вход блока 17. Блок умножения 17 обеспечивает реализацию алгоритма:
ΔУ=аtп 2/2, (3)
где ΔУ - отклонение снаряда по высоте от точки прицеливания.
Работает предлагаемая АСУВ следующим образом.
Командир объекта, зная отклонения условий стрельбы от табличных, вводит их через блок ручных поправок 6 в баллистический вычислитель 7. Тем временем наводчик, наблюдая за полем боя через прицел 2, обнаруживает цель, определяет тип боеприпаса для ее уничтожения и устанавливает датчик баллистики 12 в соответствующее положение, информация о чем поступает на входы баллистического вычислителя 7 и блока деления 15. Затем наводчик совмещает с целью при помощи органов управления на пульте управления 1 прицельную марку прицела 2 и нажимает на кнопку измерения дальности. При этом срабатывает лазерный дальномер 11 и информация о дальности до цели Дц поступает на входы блоков 7 и 15. При этом в блоке деления 15 реализуется алгоритм (2), и на его выходе образуется сигнал, соответствующий времени полета данного типа снаряда до цели tп, который затем подается на вход блока 16. Во втором квадраторе 16 данный сигнал возводится в квадратную степень, и на его выходе образуется сигнал, соответствующий tп 2 (2), который затем подается на вход блока умножения 17. Далее наводчик осуществляет заряжание орудия 5, нажимая на кнопку механизма заряжания "МЗ", при этом срабатывает датчик ветра 10, и информация о скорости бокового ветра в районе огневой позиции комплекса вооружения (танка, БМП, БТР и др.) поступает в баллистический вычислитель 7. В блоке 7 сигналы с блоков 6, 10-12 преобразуются по известным алгоритмам (см. , например, "Основы автоматики и танковые автоматические системы". М., ВАБТВ, 1976, с. 508-519) в сигнал, соответствующий углу прицеливания для данных условий стрельбы, который затем подается в блок суммирования 3. Одновременно датчик ветра 10 через ключ 8 обеспечивает включение в работу датчика скорости вертикального воздушного потока 9, благодаря которому измеряется скорость вертикального воздушного потока и формируется соответствующий этой скорости сигнал, подаваемый на вход первого квадратора 14. Поступивший в блок 14 сигнал возводится во вторую степень и поступает на выход, соответствуя квадрату скорости вертикального воздушного потока. С выхода блока 14 сигнал подается на вход блока 18. В масштабирующем блоке 18 реализуется алгоритм (1), и на его выходе образуется сигнал, соответствующий а/2, который затем подается на вход блока 17. В блоке умножения 17 сигналы с блоков 16 и 18 преобразуются по алгоритму (3) в сигнал, соответствующий отклонению данного снаряда по высоте от точки прицеливания под воздействием вертикального воздушного потока ΔУ, который затем подается на вход блока 13. В согласующем устройстве 13 данный сигнал согласуется с рабочими характеристиками блока суммирования 3 и привода вертикального наведения орудия 4 и подается на вход блока 3. В блоке суммирования сигналы с блоков 7 и 13 суммируются и формируется результирующий сигнал, соответствующий уточненному углу прицеливания, который подается в блок 4 и, в соответствии с полученным сигналом, обеспечивается перемещение орудия 5 относительно линии прицеливания.
Предварительные расчеты показывают, что эффективность стрельбы в рассмотренных условиях с использованием предложенной АСУВ может быть повышена на 10-15%, а при стрельбе в горно-пустынной местности с мощными вертикальными воздушными (особенно восходящими) потоками эффективность стрельбы повышается более чем на 20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2210715C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2235270C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ ОРУДИЯ УПРАВЛЯЕМЫМ СНАРЯДОМ ИЛИ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2007 |
|
RU2345310C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ ОРУДИЯ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2338145C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ | 2007 |
|
RU2345312C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2000 |
|
RU2186324C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2429439C2 |
Изобретение относится к автоматизированным системам управления вооружением. Технический результат - расширение функциональных возможностей системы, в частности, по учету действия вертикальных воздушных потоков, что позволяет повысить эффективность стрельбы на 10-15%. При стрельбе в горно-пустынной местности повышение эффективности может превысить 20%. Система содержит последовательно соединенные пульт управления, прицел, блок суммирования и привод наведения орудия, баллистический вычислитель, выход которого подключен ко второму входу блока суммирования, блок ручных поправок, выходы которого по количеству поправок подключены к соответствующим входам баллистического вычислителя, датчик баллистики боеприпаса, лазерный дальномер и датчик ветра, выход каждого из которых подключен соответственно к первому, второму и третьему входам баллистического вычислителя. Кроме того, в системе установлены последовательно соединенные датчик скорости вертикального воздушного потока, первый квадратор, масштабирующий блок, блок умножения и согласующее устройство, выход которого подключен к третьему входу блока суммирования, а также установлены блок деления, первый и второй входы которого соединены со вторыми выходами соответственно лазерного дальномера и датчика баллистики боеприпаса, и второй квадратор, вход которого соединен с выходом блока деления, а выход - со вторым входом блока умножения, при этом датчик скорости вертикального воздушного потока электрически соединен через ключ со вторыми выходами датчика ветра и пульта управления. 1 ил.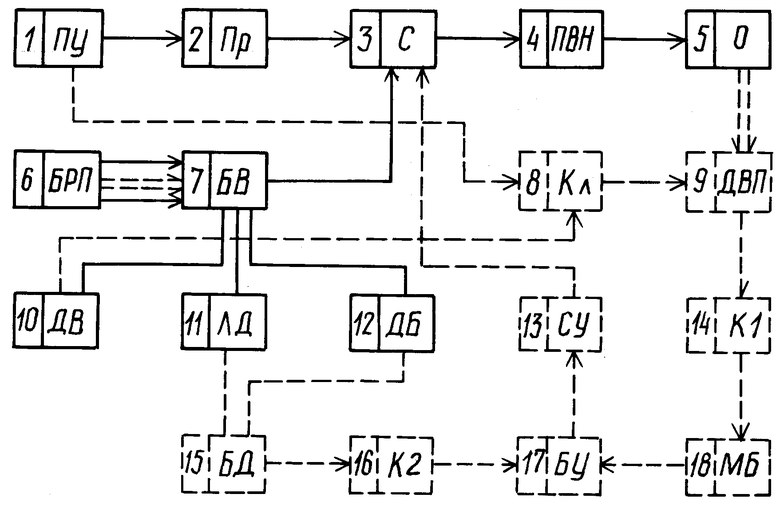
Автоматизированная система управления вооружением, содержащая последовательно соединенные пульт управления, прицел, блок суммирования и привод наведения орудия, баллистический вычислитель, выход которого подключен ко второму входу блока суммирования, блок ручных поправок, выходы которого по количеству поправок подключены к соответствующим входам баллистического вычислителя, датчик баллистики боеприпаса, лазерный дальномер и датчик ветра, выход каждого из которых подключен соответственно к первому, второму и третьему входам баллистического вычислителя, отличающаяся тем, что в нее дополнительно установлены последовательно соединенные датчик скорости вертикального воздушного потока, первый квадратор, масштабирующий блок, блок умножения и согласующее устройство, выход которого подключен к третьему входу блока суммирования, а также установлены блок деления, первый и второй входы которого соединены со вторыми выходами соответственно лазерного дальномера и датчика баллистики боеприпаса, и второй квадратор, вход которого соединен с выходом блока деления, а выход - со вторым входом блока умножения, при этом датчик скорости вертикального воздушного потока электрически соединен через ключ со вторыми выходами датчика ветра и пульта управления.
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Техническое описание и инструкция по эксплуатации | |||
| Книга первая | |||
| - М.: Военное издательство, 1984, сс.46, 47, 50, 51, 66, 67 | |||
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| US 4326340, 27.04.1982 | |||
| СПОСОБ ЛЕЧЕНИЯ ДЕФОРМАЦИЙ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРА | 2013 |
|
RU2528964C1 |

