Изобретение относится к области вооружения и военной техники, в частности к защите боевой машины (БМ) от средств воздушного нападения (СВН), например, с помощью пулеметных (пушечных) установок.
Анализ литературы показывает, что существует способ стрельбы самолета-истребителя, заключающийся в обнаружении и опознавании цели, сближении с целью, переходе с кривой сближения на кривую атаки, полете по кривой атаки, во время которого осуществляют определение угловой скорости линии визирования, дальности по цели Д, высоты полета H, углов атаки αат и скольжения βск, тангажа υ и крена γ и выработку угловых поправок стрельбы из соотношений /1/:
ψ = ωoTp,
tp= Aт+Φ(D)f(H),
αc= (aTp+b)cosυcosγ,
αк= (aTp+b)cosυsinγ,

где ψ - упреждения в плоскости атаки,
ωв - угловая скорость линии визирования,
Tр - расчетное полетное время,
αк,αc - составляющее угла α, вызванного провисанием снаряда на упрежденной дальности, соответственно в плоскости крыльев и в плоскости симметрии самолета,
υ,γ- - углы крена и тангажа носителя,
ψβ,ψα - угловые поправки на углы скольжения βск и атаки αат,
v0, v01 - относительная и абсолютная скорости снаряда,
Aг, a, b, Φ (Д), f(H) - аппроксимирующие коэффициенты и функции,
а также отработке этих поправок истребителем (прицеливании), стрельбе по цели.
Для реализации этого способа на истребителе существует система стрельбы, включающая прицел (в том числе трехстепенной гироскоп, радиодальномер и т.п. ), датчиковую аппаратуру (датчик углов атаки и скольжения - ДУАС, механизм автоматического ввода высоты, датчики углов крена и тангажа), летчика, сам самолет (планер, рули), выполняющий роль исполнительного органа, с неподвижно установленной на нем пушечной установкой.
Недостатком вышеприведенного способа и реализующей его системы является низкая эффективность стрельбы по скоростной воздушной цели, обусловленная упрощенным решением задачи встречи, погрешностями исходной датчиковой информации, неучетом метеобаллистических данных.
Существует также способ стрельбы БМ по цели, заключающийся в поиске (обнаружении), захвате целей на сопровождение, сопровождении цели прибором наводчика или командира с выдачей необходимых параметров в баллистический вычислитель, определении угловых поправок стрельбы по следующему алгоритму /2/:
α = α*-β*sinγ,
α*= α0(Дy),
β = β*+α*sinγ,
β*= ωцτ-z,
где α,β - угловые поправки стрельбы соответственно по вертикальному и горизонтальному каналам,
γ - угол крена,
α* - угол прицеливания, (вводится как табличная зависимость от дальности стрельбы Дy-α0(Дy)),
β* - угловая поправка по горизонтальному каналу без учета угла крена,
ωц - относительная угловая скорость движения цели в горизонтальной плоскости,
z - поправка на деривацию,
Ди, Ду - дальность измеренная и стрельбы,
ΔДi= kiΔxi,
xi = (T, H, V0),
где ΔДi - поправка в дальность стрельбы из-за отклонения i-го метеобаллистического фактора от его номинального значения - Δxi,
T, H, v0 - соответственно температура и давление воздуха, начальная скорость снаряда.
Существует также система стрельбы, содержащая обзорно-прицельную навигационную системы, бортовой баллистической вычислитель, определяющий угловые поправки стрельбы, стабилизатор (силовой привод) установки, пулеметную (пушечную) установку /3/.
Недостатком приведенного способа и реализующей его системы является низкая точность стрельбы, в особенности по скоростным, в частности воздушным целям.
Это обусловлено большой систематической ошибкой в вертикальной плоскости из-за неучета относительного движения цели и носителя в этой плоскости и упрощенным учетом его в горизонтальной плоскости, неучетом влияния ветра и параллакса.
Вышеприведенные факторы, в особенности первые два, при стрельбе по высокоскоростным целям приводят к промаху до десятков метров, что делает стрельбу неэффективной.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ защиты БМ от средств воздушного нападения (СВН), заключающийся в обнаружении и опознавании целей, взятии их на сопровождение, сопровождении и определении скорости сближения  цели с носителем, вычислении абсолютной начальной скорости снаряда v01 из математического выражения /4/, нахождении полетного времени снаряда tпол и упрежденной дальности Ду из математических выражений, определении угловых поправок стрельбы из математических выражений /4/.
цели с носителем, вычислении абсолютной начальной скорости снаряда v01 из математического выражения /4/, нахождении полетного времени снаряда tпол и упрежденной дальности Ду из математических выражений, определении угловых поправок стрельбы из математических выражений /4/.
Известная система огневой защиты, выбранная в качестве прототипа заявляемой системы, содержит обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую в свой состав, в частности, устройство определения углов упреждения, содержащее блок формирования угла упреждения Δβ, блок формирования угла упреждения Δε, блок формирования упрежденной дальности Ду, блок формирования полетного времени tпол, блок формирования абсолютной начальной скорости v01 и блок формирования скорости сближения  , а также силовые приводы установки и пулеметную (пушечную) установку /4/.
, а также силовые приводы установки и пулеметную (пушечную) установку /4/.
Недостатком этого способа и реализующей его системы является неучет баллистического ветра, как поперечного Wz, так и продольного Wx (особенно важен при стрельбе по скоростным, например воздушным целям), а также других поправок стрельбы, например, параллакса цели, а также угла крена носителя γ .
Это приводит к снижению точности, и соответственно, эффективности, в особенности при стрельбе по скоростным целям, при больших угловых скоростях линии визирования, в сложной метеорологической обстановке.
Задачей предлагаемого способа и реализующей его системы является повышение эффективности стрельбы БМ путем повышения точности определения упрежденной точки (точки встречи снаряда с целью).
Поставленная задача решается тем, что в известном способе защиты БМ, заключающемся в обнаружении и опознавании целей, взятии их на сопровождение, сопровождении цели, определении скорости сближения цели с носителем, вычислении абсолютной начальной скорости снаряда, полетного времени и упрежденной дальности из математических выражений /8/, определении кинематических угловых поправок стрельбы, постоянном отклонении с учетом их стволов ПУ относительно линии визирования и стрельбе по цели, согласно изобретению после определения кинематических угловых поправок Δβ,Δε дополнительно определяют угловые поправки на боковой Wz и продольный Wx баллистический ветер, на параллакс ПУ и прицела из соотношений:
по горизонтальному каналу


по вертикальному каналу

 - угловая поправка по горизонтальному каналу на боковой ветер Wz,
- угловая поправка по горизонтальному каналу на боковой ветер Wz, - угловая поправка в угол прицеливания на продольный ветер Wx,
- угловая поправка в угол прицеливания на продольный ветер Wx,
Δβt - угловая поправка по горизонтальному каналу из-за погрешности определения полетного времени,
Δεt - угловая поправка по вертикальному каналу из-за погрешности определения полетного времени,
Δt - поправка в полетное время t на продольный ветер Wx,
Д, Ду - соответственно дальность до цели и упрежденная дальность,
ωβ,ωε - угловая скорость линии визирования соответственно по горизонтальному и вертикальному каналам, - коэффициенты аппроксимации бокового отклонения (из-за Wz) и отклонения в угле прицеливания (из-за Wx),
- коэффициенты аппроксимации бокового отклонения (из-за Wz) и отклонения в угле прицеливания (из-за Wx), - коэффициенты аппроксимации поправки в полетное время t из-за продольного ветра Wx,
- коэффициенты аппроксимации поправки в полетное время t из-за продольного ветра Wx,
y0, z0 - параллакс-координаты расположения прицела относительно ПУ;
Дс - дальность сведения,
Δβпар,Δεпар\ - угловая поправка на параллакс соответственно в горизонтальном и вертикальном каналах,
а затем вычисленные угловые поправки суммируют с ранее определенными баллистическими и кинематическими угловыми поправками по соответствующему каналу с учетом угла крена носителя (БМ) из соотношений
где ΔβΣ,ΔεΣ - суммарная угловая поправка соответственно в горизонтальном и вертикальном каналах,
α0,β0 - соответственно углы прицеливания и деривации,
Δβ,Δε - кинематические угловые поправки на движение цели и носителя соответственно по горизонтальному и вертикальному каналам,
γ - угол крена носителя.
Поставленная задача решается также тем, что угловую поправку на боковой ветер  определяют из соотношения:
определяют из соотношения:
где vн, q - скорость носителя и угол разворота ПУ относительно вертикальной оси носителя;
v01 - абсолютная начальная скорость снаряда;
t, Ду - соответственно полетное время и упрежденная дальность стрельбы.
Поставленная задача решается также тем, что учет продольного ветра осуществляют не путем введения в соотношения 1-2 (п. 1 формулы изобретения) угловых поправок Δβt,  , а путем изменения абсолютной начальной скорости снаряда V01 из соотношения
, а путем изменения абсолютной начальной скорости снаряда V01 из соотношения ,
,
где v01, v'01 - абсолютная начальная скорость снаряда и скорректированная с учетом продольного ветра;
δv01 - приведенное приращение абсолютной начальной скорости снаряда, вызванное продольным ветром Wx.
Поставленная задача решается также тем, что поправка в полетное время t - Δ t и угол прицеливания α-Δα определяют с учетом не только продольного ветра Wx, но и других метеобаллистических факторов Xi
где Xi - i-й метеобаллистический фактор; - отклонение соответственно полетного времени t и угла прицеливания α из-за отклонения от номинального значения i-го метеобаллистического фактора,
- отклонение соответственно полетного времени t и угла прицеливания α из-за отклонения от номинального значения i-го метеобаллистического фактора,
Xi = (H, T, Wx, vо),
где H, T - давление и температура воздуха;
vо - относительная скорость снаряда.
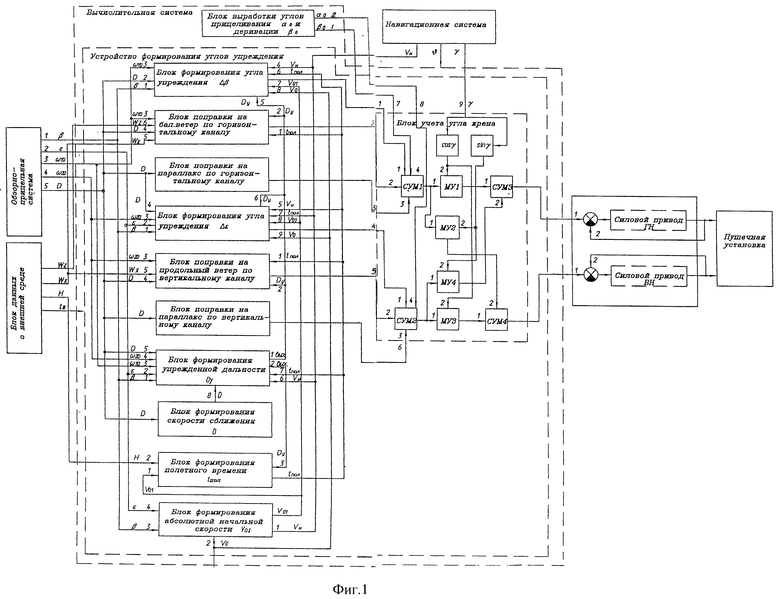
Поставленная задача решается тем, что в известную систему стрельбы БМ по цели, содержащую обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую устройство определения углов упреждения, согласно изобретению в устройство определения углов упреждения дополнительно вводят блок поправки на баллистический ветер Wx, Wz по горизонтальному каналу, блок поправки на продольный ветер по вертикальному каналу, блок поправки на параллакс по горизонтальному каналу, блок поправки на параллакс по вертикальному каналу, а также блок учета угла крена, причем первый вход блока поправки на баллистический ветер по горизонтальному каналу соединен с выходом блока формирования полетного времени tпол, второй его вход соединен с первым выходом блока формирования упрежденной дальности Ду, третий и четвертый входы - соответственно с третьим и пятым выходами обзорно-прицельной системы, пятый и шестой входы - с выходами блока данных о внешней среде, а выход блока поправки на баллистический ветер по горизонтальному каналу соединен со вторым входом блока учета угла крена; вход блока поправки на параллакс по горизонтальному каналу соединен с пятым выходом обзорно-прицельной системы, а выход его - с третьим входом блока учета угла крена; первый и второй входы блока поправки на продольный ветер по вертикальному каналу соединены соответственно с выходом блока формирования полетного времени tпол и первым выходом блока формирования упрежденной дальности Ду, третий и четвертый его входы - соответственно с четвертым и пятым выходами обзорно-прицельной системы, пятый вход - с выходом блока данных о внешней среде, а выход блока поправки на продольный ветер по вертикальному каналу соединен с пятым входом блока учета угла крена; вход блока поправки на параллакс по вертикальному каналу соединен с пятым выходом обзорно-прицельной системы, а выход его - с шестым входом блока учета угла крена, седьмой и восьмой входы которого соединены соответственно с первым и вторым выходами блока угла прицеливания и деривации, девятый вход блока учета угла крена соединен с выходом навигационной системы, а его первый и второй выходы соединены с первыми входами приводов соответственно горизонтального и вертикального наведения.
Поставленная задача решается также тем, что в системе стрельбы БМ по цели, по п. 5, блок учета угла крена содержит последовательно соединенные первый сумматор, первое множительное устройство, третий сумматор, последовательно соединенные второй сумматор, второе множительное устройство, четвертый сумматор, причем первые входы первого и второго сумматоров соединены с выходами соответственно блока формирования угла упреждения Δβ и блока формирования угла упреждения Δε, вторые входы - с выходами соответственно блока поправки на баллистический ветер по горизонтальному каналу и блока поправки на продольный ветер по вертикальному каналу, а третьи их входы - с выходами блоков определения параллакса соответственно по горизонтальному и вертикальному каналам, а четвертые их входы - соответственно с первым и вторым выходами блока выработки углов прицеливания и деривации, вторые входы первого и третьего множительных устройств соединены с выходом косинусного преобразователя, вторые входы второго и четвертого множительных устройств - с выходом синусного преобразователя, входы косинусного и синусного преобразователей соединены с выходом навигационной системы, первый вход второго множительного устройства соединен с выходом первого сумматора, а второй его вход - с выходом синусного преобразователя, а выход второго множительного устройства - со вторым входом четвертого сумматора, выход которого соединен с первым входом привода вертикального наведения, первый вход четвертого множительного устройства соединен с выходом второго сумматора, а второй его вход - с выходом синусного преобразователя, выход четвертого множительного устройства соединен со вторым входом третьего сумматора, выход которого соединен с первым входом привода горизонтального наведения.
На фиг. 1 представлена структурная схема вышеописанной системы.
Именно определенные с помощью блоков поправки на баллистический ветер Wx,z по горизонтальному и вертикальному каналам, блоков поправки на параллакс по горизонтальному и вертикальному каналам, а также блока учета угла крена обеспечат согласно способу наибольшую точность и эффективность стрельбы, особенно по скоростной цели, при существующей структуре системы управления БМ и тем самым достижение цели изобретения.
Это позволяет сделать вывод о том, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сопоставительный анализ заявляемых решений с прототипом показывает, что способ отличается от известного тем, что после вычисления кинематических поправок на движение цели и носителя Δβ,Δε последовательно определяют угловые поправки на боковой Wz и продольной Wx баллистический ветер, на параллакс ПУ и прицела из соотношений:
по горизонтальному каналу

по вертикальному каналу

где  - угловая поправка по горизонтальному каналу на боковой ветер Wz,
- угловая поправка по горизонтальному каналу на боковой ветер Wz, - угловая поправка в угол прицеливания на продольный ветер Wx,
- угловая поправка в угол прицеливания на продольный ветер Wx,
Δβt - угловая поправка по горизонтальному каналу из-за погрешности определения полетного времени t,
Δεt - угловая поправка по вертикальному каналу из-за погрешности определения полетного времени t,
Δt - поправка в полетное время t на продольный ветер Wx,
Д, Ду - соответственно дальность до цели и упрежденная дальность,
ωβ,ωε - угловая скорость линии визирования соответственно по горизонтальному и вертикальному каналам, - коэффициенты аппроксимации бокового отклонения (из-за Wz) и отклонения в угле прицеливания (из-за Wx),
- коэффициенты аппроксимации бокового отклонения (из-за Wz) и отклонения в угле прицеливания (из-за Wx), - коэффициенты аппроксимации поправки в полетное время t из-за продольного ветра Wx,
- коэффициенты аппроксимации поправки в полетное время t из-за продольного ветра Wx,
y0, z0 - параллакс - координаты расположения прицела относительно ПУ,
Дс - дальность сведения,
Δβпар,Δεпар - угловая поправка на параллакс соответственно в горизонтальном и вертикальном каналах.
При этом коэффициенты аппроксимации  должны быть определены предварительно путем аппроксимации результатов расчетов внешнебаллистических зависимостей
должны быть определены предварительно путем аппроксимации результатов расчетов внешнебаллистических зависимостей
yj= (t,α,β),
xi = (H, T, Wx, Wz, v0),
где t,α,β - соответственно полетное время снаряда, углы прицеливания и деривации,
H, T, Wx, Wz, vo - соответственно давление (плотность) и температура воздуха, продольный и поперечный ветер, начальная скорость снаряда,
εу - угол места упрежденного положения цели.
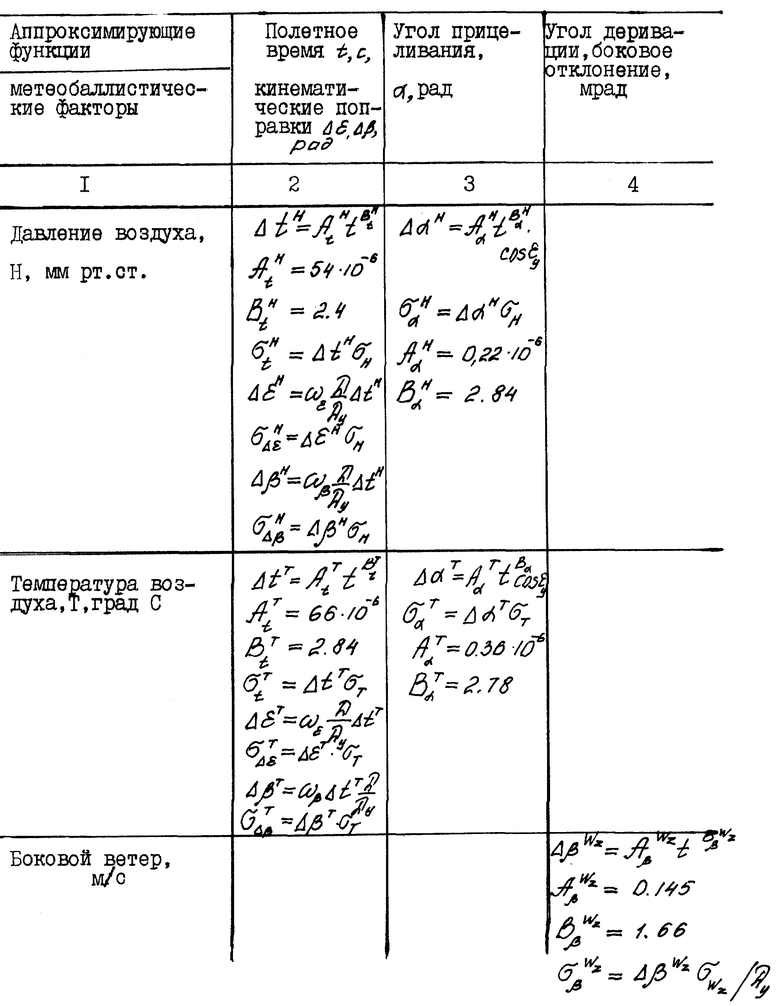
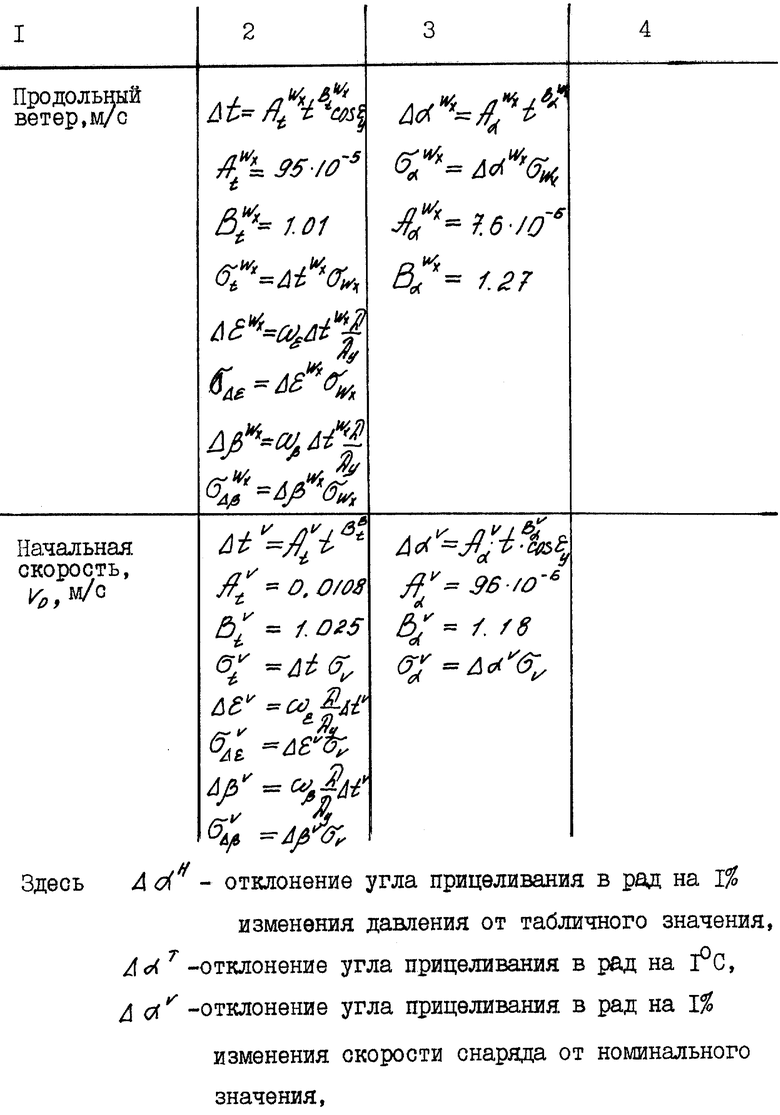
В таблице в качестве примера приведены вид и параметры аппроксимирующих зависимостей для конкретного 30-мм снаряда
Для других типов снарядов аппроксимирующие коэффициенты определяются аналогично.
В некоторых случаях поправку на поперечный (боковой) ветер Wz удобнее вычислять по более общей зависимости - формуле Дидиона /5/:
где vн, q - скорость носителя и угол разворота ПУ относительно вертикальной оси носителя,
t, Ду - соответственно полетное время и упрежденная дальность стрельбы,
v01 - абсолютная начальная скорость снаряда.
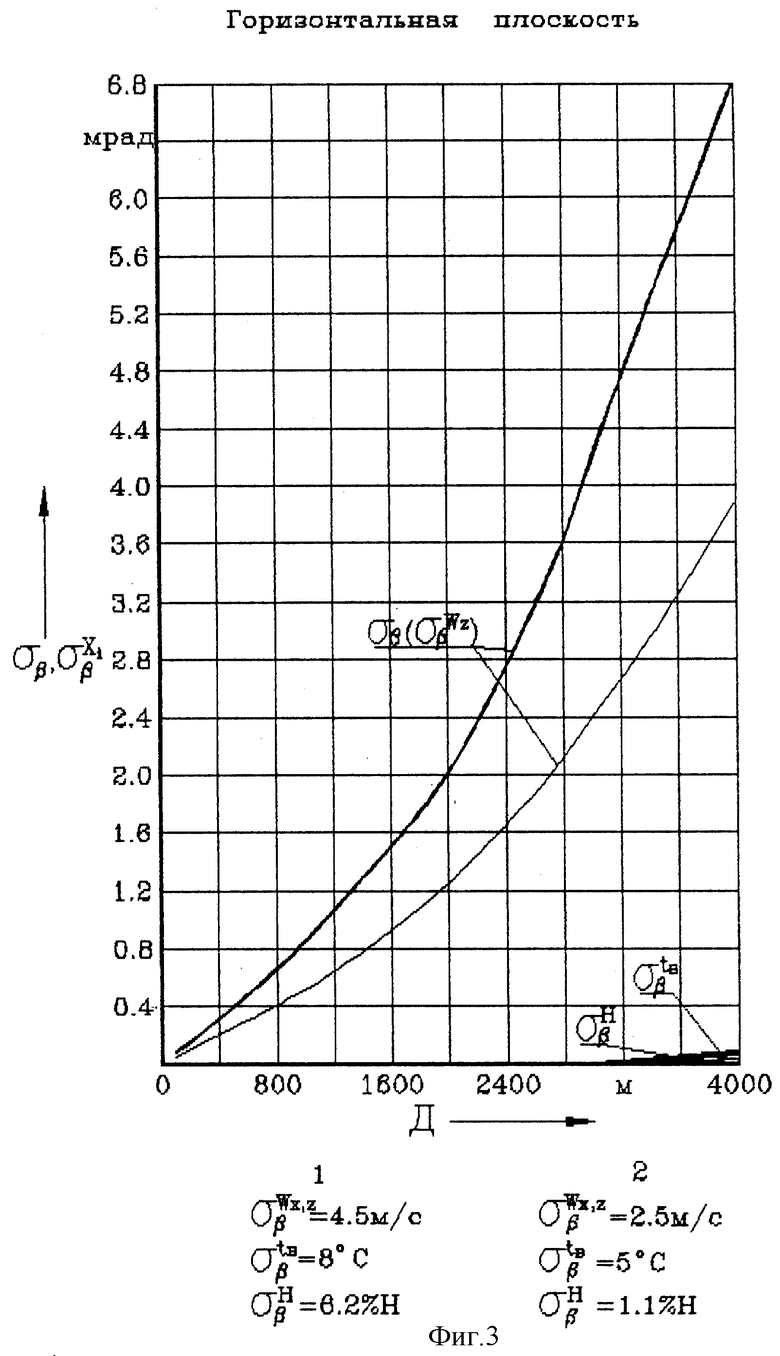
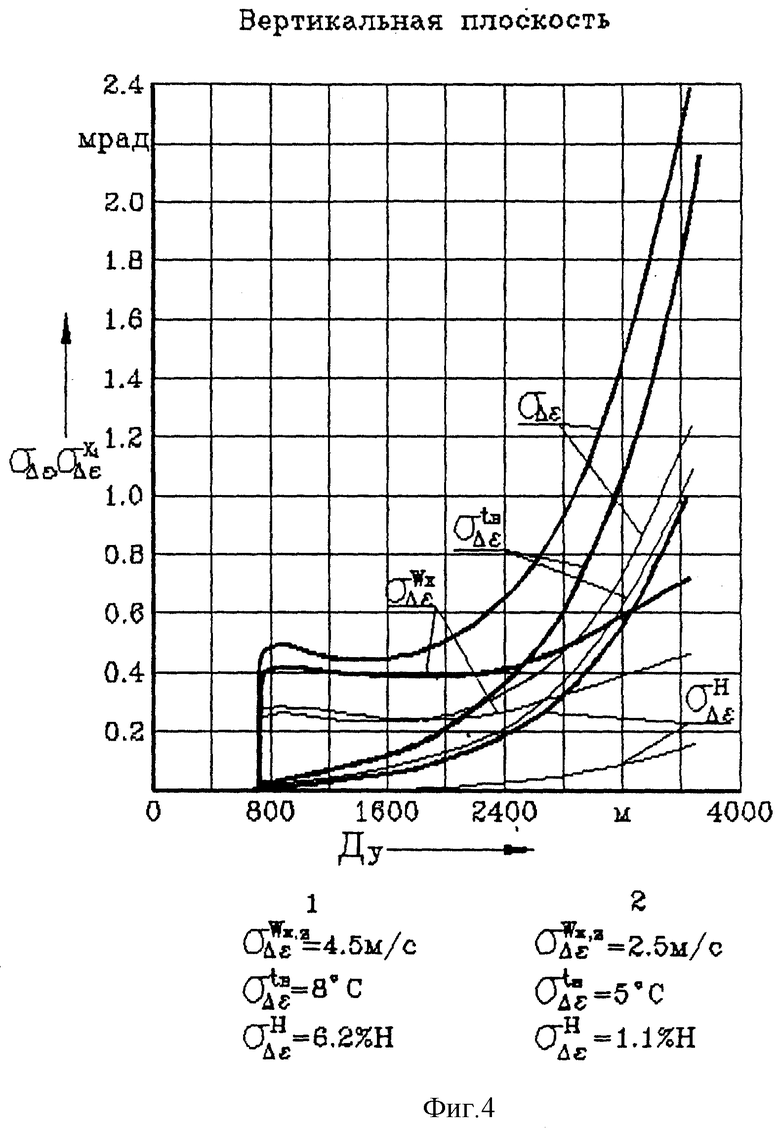
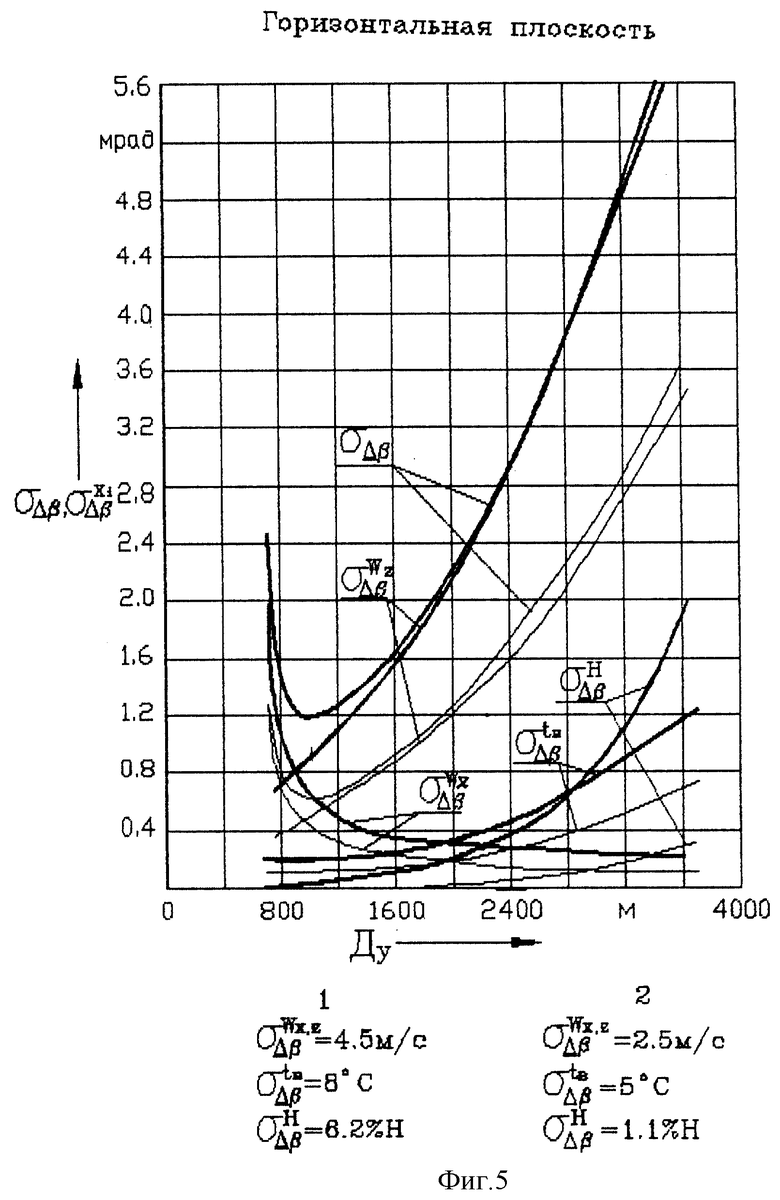
Доказательством необходимости учета при стрельбе вышеприведенных поправок являются данные, приведенные на фиг. 2 - 5, - ошибки учета метеобаллистической подготовки соответственно в вертикальной и горизонтальной плоскостях для двух уровней ошибок определения первичной информации о состоянии внешней среды и начальной скорости снаряда
xi = (T, H, Wx, Wz, vo), соответствующих современному состоянию датчиков (способов определения) внешних условий:
I  (глазомерный способ определения Wx, Wz),
(глазомерный способ определения Wx, Wz),
σт= 8°C (по метеобюллетеню),
σн= 6,6% H (неучет плотности воздуха);
II  (определение Wx,z по метеобюллетеню)
(определение Wx,z по метеобюллетеню)
σт= 5°C (по датчику),
σн= 1,1% H (по метеобюллетеню).
Обеспечиваемые в настоящее время точности определения бокового ветра Wz при стрельбе по наземной цели (фиг. 3) в горизонтальном канале наиболее сильно из остальных метеосоставляющих сказываются на суммарной ошибке учета метеобаллистической подготовки. Так, на дальности Д = 2000 м ошибки учета Wz в горизонтальном канале  составляют 1,2 мрад при определении Wz по метеобюллетеню
составляют 1,2 мрад при определении Wz по метеобюллетеню  и 2 мрад - при глазомерном способе
и 2 мрад - при глазомерном способе 
Далее с увеличением дальности ошибки учета Wz возрастают нелинейно, достигая на дальностях Д = 3000 = 4000 м десятков метров. Это по существу делает стрельбу неэффективной, тем более учитывая характер ошибок - групповые, смещают весь эллипс рассеивания в сторону.
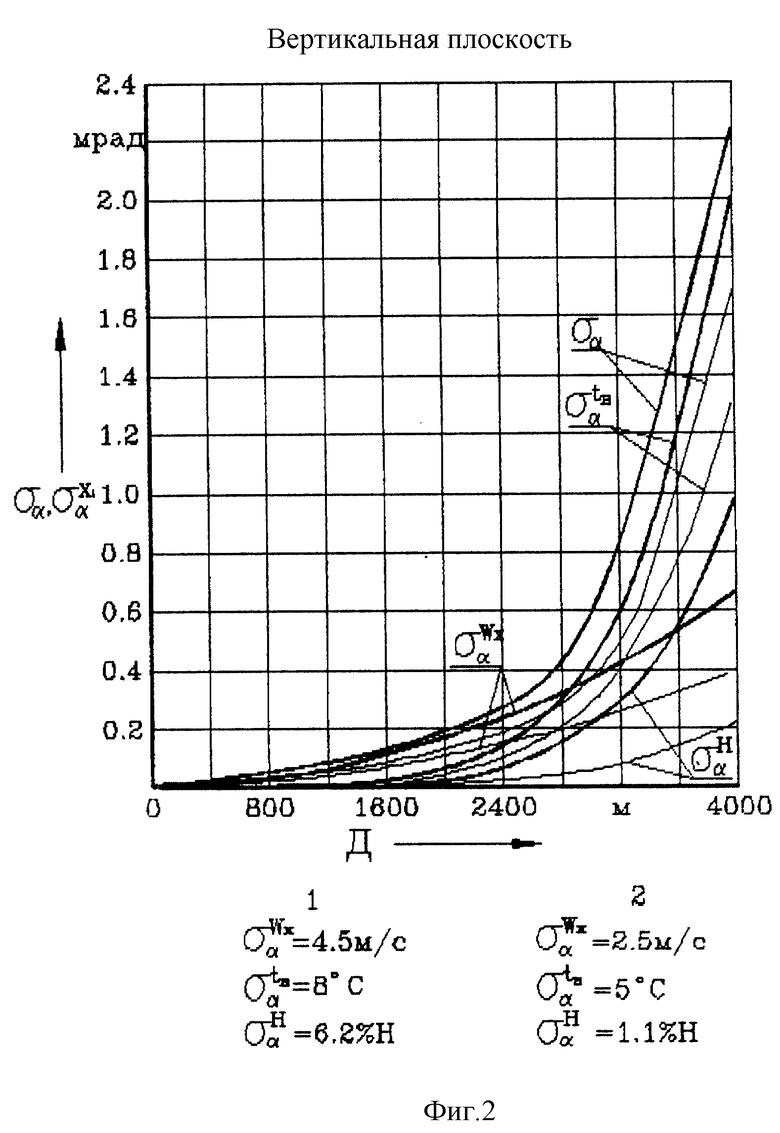
Характер влияния продольного ветра Wx несколько иной: определяющее влияние Wx при стрельбе по наземной цели, в отличие от Wz - в вертикальном канале. При этом ошибки учета продольного ветра в угле прицеливания одного порядка с ошибками учета давления (плотности) и температуры воздуха, см. фиг. 2.
Таким образом, при стрельбе по наземной цели малокалиберного неуправляемого вооружения БМ наибольший вклад в ошибки учета метеоподготовки вносят ошибки определения бокового ветра, по горизонтальному каналу. Ошибки из-за неточности определения температуры T и плотности H воздуха до дальности Д = 2000 м пренебрежимо малы по сравнению с Wz.
В связи с вышесказанным, необходимо в состав СУО БМ ввести датчик ветра или, по крайней мере, использовать данные о нем из метеобюллетеня. И, соответственно, необходим учет его (Wx,z) в стрельбовом алгоритме.
При стрельбе по воздушным скоростным целям, так же как и при стрельбе по наземным (неподвижным или малоподвижным) целям, погрешности определения бокового ветра приводят к ошибке по горизонтальному каналу, превалирующей по сравнению с остальными метеофакторами (H, T, Wx), см. фиг. 5.
Поэтому переход с глазомерного способа определения бокового ветра  на метеобюллетень
на метеобюллетень  позволяет снизить суммарные ошибки учета метеоданных на дальности Д = 2000 м с 2,2 до 1,2 мрад, на Д = 3000 м - c 4,4 до 2,4 мрад. Следовательно, неучет бокового ветра существенно снижает эффективность стрельбы. Причем, с увеличением дальности эта тенденция усиливается: ошибки от Wz перекрывает все остальные составляющие суммарной ошибки, например, ошибки прицельно-навигационного комплекса, см. /4/, фиг. 9.
позволяет снизить суммарные ошибки учета метеоданных на дальности Д = 2000 м с 2,2 до 1,2 мрад, на Д = 3000 м - c 4,4 до 2,4 мрад. Следовательно, неучет бокового ветра существенно снижает эффективность стрельбы. Причем, с увеличением дальности эта тенденция усиливается: ошибки от Wz перекрывает все остальные составляющие суммарной ошибки, например, ошибки прицельно-навигационного комплекса, см. /4/, фиг. 9.
Как уже отмечалось выше, все ошибки на фиг. 2 - 5 приведены только по вертикальному и горизонтальному каналам, но не по направлению (продольному каналу). Однако при стрельбе по воздушной цели, пролетающей со скоростью vц ≥ 50 - 200 м/с, продольные ошибки трансформируются в промахи в картинной плоскости, пропорциональные величине относительной угловой скорости линии визирования и погрешности в величине полетного времени.
Согласно используемому стрельбовому алгоритму /4/ при определении кинематических поправок Δβ,Δε погрешность их определения из-за неточности определения полетного времени t определяется по зависимостям
где xi = (H, T, Wx, vo).
В частности, поправка от i-го метеобаллистического фактора может быть вычислена с помощью аппроксимирующих зависимостей типа
Таким образом, значения поправок Δβt,Δεt следует рассчитывать с учетом погрешностей в полетном времени Δt, вносимых от всего вектора метеобаллистических факторов  = (H, T, Wx, vo). Однако предыдущий опыт исследований показывает, что определяющий вклад в Δβt,Δεt вносят ошибки определения продольного Wx ветра и ошибки определения начальной скорости vo, см. фиг. 4 - 5. Поэтому именно Wx вынесены в п.1 способа изобретения.
= (H, T, Wx, vo). Однако предыдущий опыт исследований показывает, что определяющий вклад в Δβt,Δεt вносят ошибки определения продольного Wx ветра и ошибки определения начальной скорости vo, см. фиг. 4 - 5. Поэтому именно Wx вынесены в п.1 способа изобретения.
При повышении точности учета вышеперечисленных параметров (Wx, vo) начинают сказываться в суммарной ошибке учета метеобаллистических данных и такие параметры, как H, T.
Однако, как было показано выше при анализе прототипов /1-3/, в большинстве баллистических алгоритмов отклонения по H, T и vo, как правило, уже учитываются при расчете полетного времени t и угла прицеливания α.
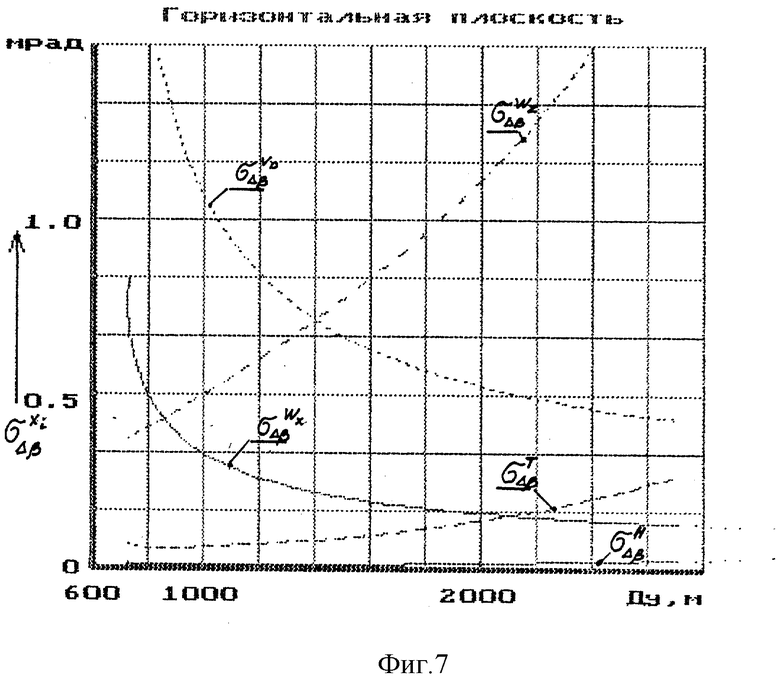
На фиг. 6, 7 проиллюстрирован вклад вышеперечисленных метеобаллистических факторов (через погрешность определения Δt - с нижним индексом Δβ,Δε) с учетом погрешностей первичной информации, соответствующих состоянию современной техники.
Как следует из 6, 7, при стрельбе по воздушным целям определяющий вклад в ошибки учета метеофакторов (через неточность определения t) вносят ошибки определения продольного ветра Wx.
Учет ошибок Wx при стрельбе по воздушной цели существенно видоизменяет ошибки учета метеоподготовки: наблюдается возрастание этих ошибок в ближней зоне, отслеживающее возрастание угловых скоростей линии визирования. Так, при стрельбе по воздушной цели, пролетающей на параметре p = 500 м, высоте H = 500 м, на дальностях стрельбы Ду = 800 - 2000 м ошибка учета Wx составляет по горизонтальному каналу 1,0 - 0,35 мрад, по вертикальному - 0,5 - 0,25 мрад.
Отсюда следует вывод: ввиду определяющего влияния на малых дальностях (где стрельба наиболее эффективна) ошибок учета продольного ветра Wx целесообразно при стрельбе, в особенности по скоростным воздушным целям, учитывать продольный ветер Wx.
Как следует из вышеперечисленных фиг. 6 и 7, точность стрельбы, в особенности по скоростным воздушным целям, в значительной степени определяется точностью баллистической подготовки.
Существуют следующие способы уточнения начальной скорости снаряда vo: по настрелу, по датчику vо, введение температуры заряда, введение межпартионного разброса, позволяющего учитывать химические свойства и вес пороховой навески.
По опыту разработок зенитных систем точность определения начальной скорости по настрелу составляет  с помощью датчиков начальной скорости
с помощью датчиков начальной скорости  .
.
В то же время в литературе отмечается, что для малокалиберной артиллерии определение таких составляющих баллистической подготовки, как температура заряда и межпартионный разброс vo из-за различия в химических свойствах и весе пороховой навески, производится с погрешностями, не оказывающими существенного влияния на точность баллистической подготовки (если нет датчиков vo), т.к.  ,
,  .
.
С учетом поля допусков на начальную скорость vo при изготовлении пушки  и того, что в зенитных системах к эксплуатации допускаются стволы с отклонениями значений vo от табличной vo на 5%, далее при расчетах принимаем среднеквадратическое отклонение начальной скорости по полю допусков
и того, что в зенитных системах к эксплуатации допускаются стволы с отклонениями значений vo от табличной vo на 5%, далее при расчетах принимаем среднеквадратическое отклонение начальной скорости по полю допусков  .
.
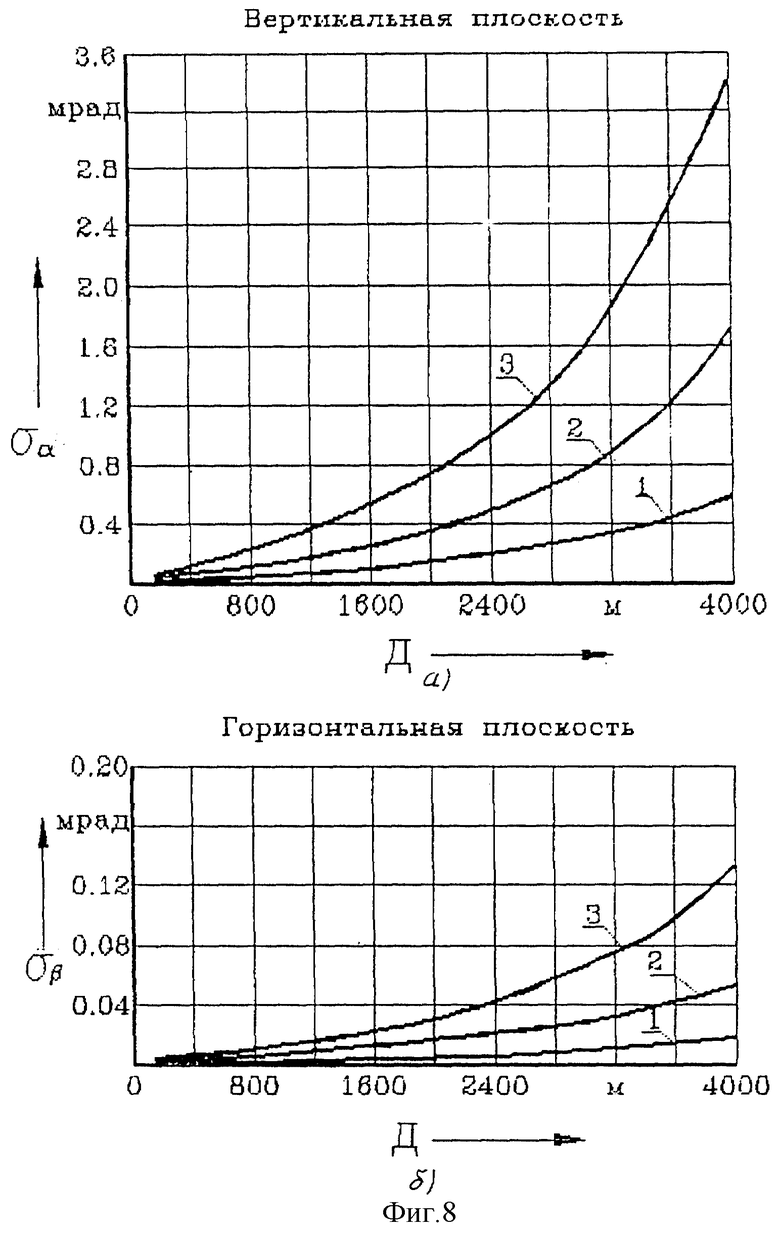
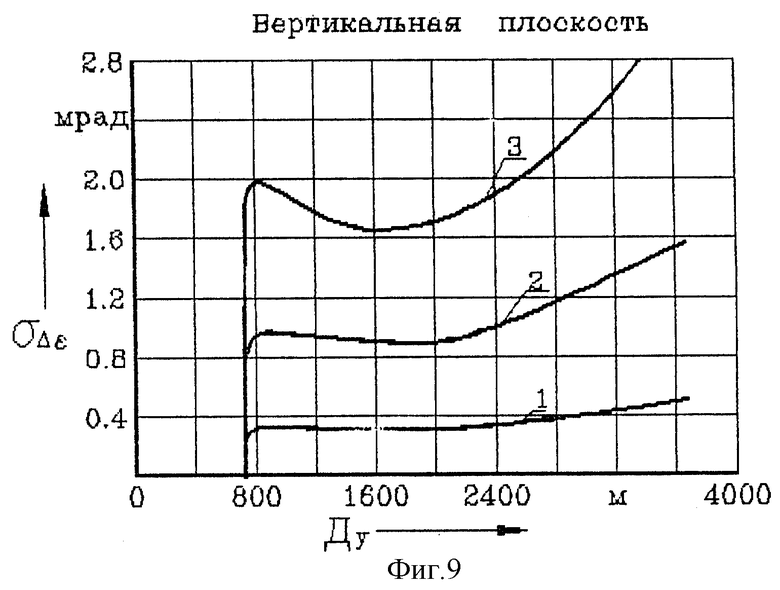
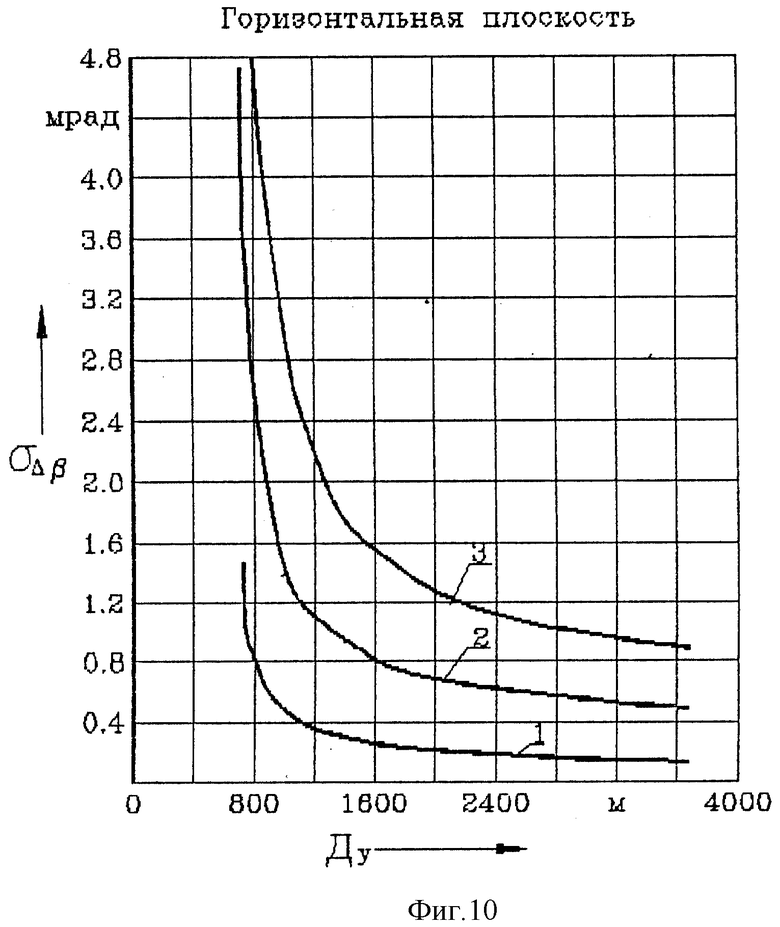
На фиг. 8 - 10 представлены зависимости ошибок определения угловых поправок σΔβ,σΔε от дальности при стрельбе по неподвижной наземной (фиг. 8) и по воздушной цели, пролетающей со скоростью vц = 200 м/с на p = 500 м, H = 500 м при трех уровнях ошибок определения vo:  (из поля допусков),
(из поля допусков),  (по настрелу) и
(по настрелу) и  (по датчику vo) (фиг. 9 - 10).
(по датчику vo) (фиг. 9 - 10).
Как следует из фиг. 8, при стрельбе по неподвижной наземной цели влияние  сказывается в вертикальном канале: на дальности Д = 2000 м поправка в определении угла атаки
сказывается в вертикальном канале: на дальности Д = 2000 м поправка в определении угла атаки  составляет
составляет  при определении vo из поля допусков, 0,4 мрад - при учете настрела
при определении vo из поля допусков, 0,4 мрад - при учете настрела  и 0,15 мрад - при наличии датчика vo
и 0,15 мрад - при наличии датчика vo .
.
При стрельбе по воздушной цели ошибки учета баллистической подготовки, во-первых, возрастают, в особенности на малых дальностях, и, во-вторых, сближаются по обоим каналам. В зависимости от способа баллистической подготовки они составляют, например, в вертикальном канале при пролете цели на p = 500 м, H = 500 м на Ду = 2000 м 1,7 мрад при неучете настрела, 0,9 мрад при его учете и 0,3 мрад при наличии датчика vo.
С увеличением параметра и высоты пролета цели, дальности стрельбы ошибки учета баллистической подготовки вносят больший вклад в суммарное рассеяние.
Таким образом, погрешность определения начальной скорости vo оказывает определяющее влияние на точность метеобаллистической подготовки и, соответственно, эффективность стрельбы.
Отсюда следует очевидный вывод: необходимо учитывать отклонения фактического значения vo от номинального в стрельбовом алгоритме либо как поправку в угле упреждения  , см. п.1 формулы изобретения, либо как поправку в заводимом при вычислениях t, α самом значении vo, см. п.4 формулы изобретения.
, см. п.1 формулы изобретения, либо как поправку в заводимом при вычислениях t, α самом значении vo, см. п.4 формулы изобретения.
На первый взгляд, казалось бы, при учете Δvo проще добавить отклонение Δvo в значение vo . Однако, строго говоря, при этом следует учитывать и изменение функции сопротивления воздуха.
. Однако, строго говоря, при этом следует учитывать и изменение функции сопротивления воздуха.
В ряде случаев эта функция в вычислительной системе либо задается таблично функцией от одного входа дальности Д для снаряда конкретной баллистики, либо аппроксимируется функцией с конкретными коэффициентами, т.е. не предусматривается изменение ее значений при изменении vo. Это может затруднить ее реализацию 2-м способом, см. п. 3 формулы изобретения.
Зависимости для расчета поправок на параллакс осей прицелов наводчика (командира) и стволов орудия при стрельбе прямой наводкой получаются из элементарных геометрических соотношений и широко известны
где y0, z0 - величины параллакса прицела,
Д - дальность до цели,
Дс - дальность сведения оси прицела и пушки (пулемета).
При этом сведение производится обычно при нулевых углах возвышения, при стрельбе же значение параллакса по вертикали будет меняться. С учетом этого
где xo - длина ствола,
α - угол возвышения пушки.
Однако расчеты показывают, что вносимое уточнение ничтожно мало при усложнении расчетной зависимости стрельбового алгоритма.
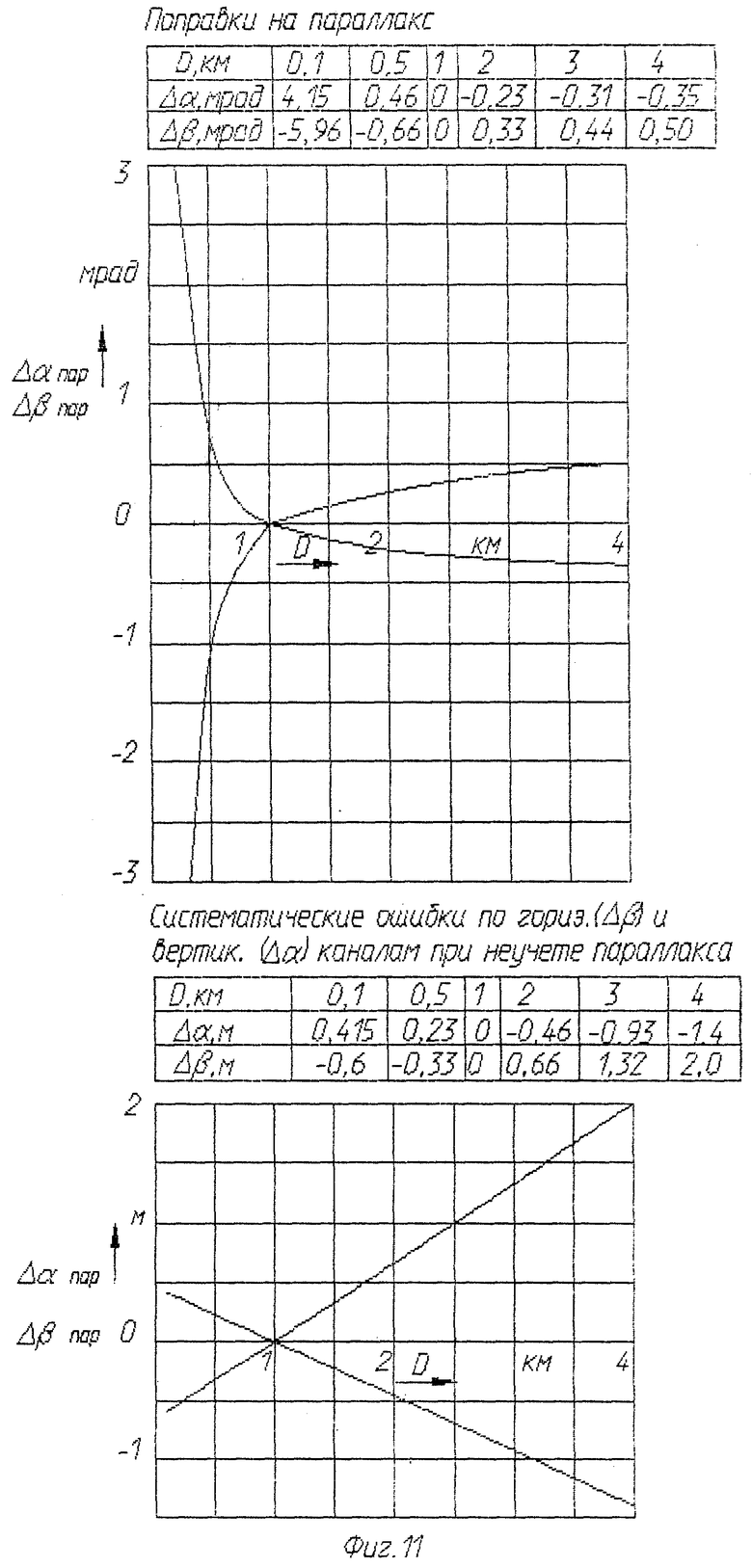
Необходимость же введения в стрельбовый алгоритм поправок на параллакс (3) подтверждается данными, приведенными на фиг. 11 - зависимостями поправок на параллакс в вертикальной Δεпар и горизонтальной Δβпар плоскостях от дальности при стрельбе из блока оружия БМП-3:
yo = 0,483 м, zo = -0,693 м, Дс = 1000 м.
Как следует из фиг. 11, неучет параллакса приведет к систематическому промаху на дальности Д = 100 м по высоте ≈ 0,4 м и по направлению ≈ 0,6 м, на дальности Д = 4 км по высоте ≈ 1,4 м и по направлению ≈ 2,0 м.
Таким образом, все вышеприведенные материалы обосновывали необходимость и достаточность вводимых поправок.
Далее эти поправки суммируются с ранее определенными угловыми баллистическими и кинематическими поправками по соответствующему каналу, а затем учитывается угол крена из соотношений
где ΔβΣ,ΔεΣ - суммарная угловая поправка соответственно в горизонтальном и вертикальном каналах,
αo,βξ - соответственно углы прицеливания и деривации,
Δβ,Δε - кинематические угловые поправки на движение цели и носителя соответственно по горизонтальному и вертикальному каналам,
γ - угол крена носителя.
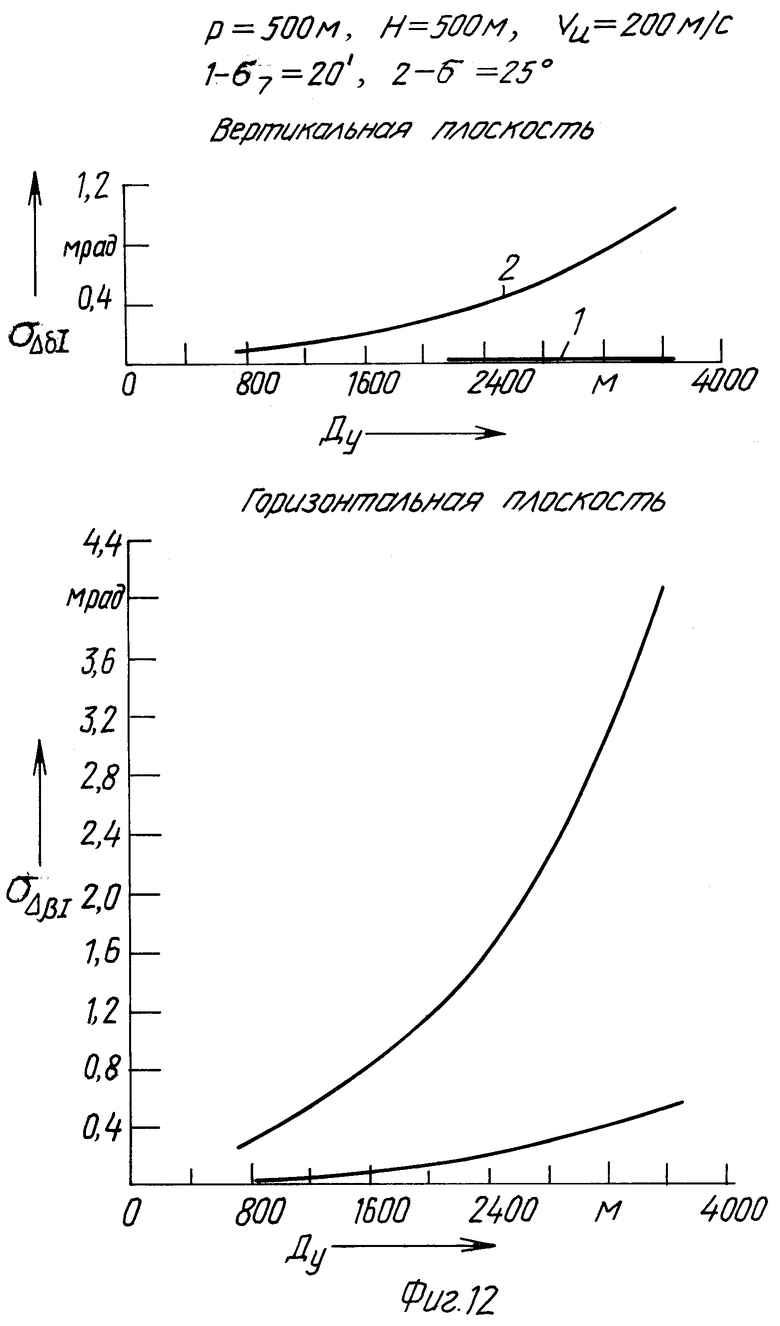
На фиг. 12 приведены зависимости ошибок определения угловых поправок стрельбы от упрежденной дальности при стрельбе по воздушной цели при определении угла крена с помощью датчика крена (σγ= 20′) и без учета угла крена (при стрельбе с места (σγ= 2,5°)
Уровень ошибок определения угловых поправок при неучете угла крена составляет на дальности Д = 2 км σΔβ= 1,2 мрад по горизонтальному каналу и σΔε= 0,3 мрад по вертикальному.
При возрастании дальности до Д = 4 км ошибки в горизонтальном канале составляют уже σΔβ= 5 мрад, т.е. выходят на уровень ошибок бокового ветра, являющихся превалирующими в ошибках учета метеобаллистической подготовки.
Это объясняет введение датчика крена уже на БМП-3 /2/ и соответственно учет его в стрельбовом алгоритме.
Таким образом, предлагаемый способ формирования упрежденной точки (в системе координат, связанной с линией визирования) с учетом вводимых поправок, обоснованных выше, является рациональным способом, позволяющим обеспечить наиболее высокую точность стрельбы в рамках заданной структуры и точность характеристик системы управления БМ.
Сравнение заявляемых технических решений с прототипами позволяет установить соответствие критерию "новизна".
Отдельные операции, входящие в заявляемый способ, широко известны. Однако при их введении в способ в указанной последовательности (связи) по предлагаемым соотношениям достигается желаемый эффект - повышение эффективности стрельбы.
Это позволяет сделать вывод о соответствии предлагаемых решений критериям новизны и изобретательского уровня.
На фиг. 1 представлена структурная схема системы стрельбы БМ по цели и место в ней заявляемых блоков поправки на баллистический ветер по горизонтальному каналу, блока поправки на продольный ветер по вертикальному каналу, блоков поправки на параллакс по вертикальному и горизонтальному каналам, блока учета угла крена.
На фиг. 2, 3 представлены ошибки учета метеорологических факторов соответственно по вертикальному и горизонтальному каналам для двух уровней точности определения первичной информации при стрельбе по наземной цели.
На фиг. 4, 5, представлены ошибки учета метеорологических факторов соответственно по вертикальному и горизонтальному каналам для двух уровней точности определения первичной информации при стрельбе по воздушной цели, пролетающей со скоростью vц = 200 м/с на параметре p = 500 м и высоте H = 500 м.
На фиг. 6, 7 приведены ошибки учета метеобаллистической подготовки соответственно по вертикальному и горизонтальному каналам при стрельбе по воздушной цели (vц = 200 м/с), пролетающей на параметре p = 500 м и высоте H = 500 м; точность учета первичной информации:
На фиг. 8 даны ошибки учета баллистической подготовки при стрельбе по наземной цели (а - вертикальная плоскость):
1 -  ,
,
2 -  ,
,
3 -  .
.
На фиг. 9 - 10 даны ошибки учета баллистической подготовки при стрельбе по воздушной цели соответственно в вертикальной и горизонтальной плоскостях: vц = 200 м/с, p = 500 м, H = 500 м;
1 -  ,
,
2 -  ,
,
3 -  .
.
На фиг. 11 приведены поправки на параллакс оси прицела наводчика и ствола пушки в вертикальной Δεпар и горизонтальной Δβпар плоскостях.
На фиг. 12 даны зависимости ошибок учета угла крена при стрельбе по воздушной цели (vц = 200 м/с) с помощью датчика крена (σγ= 20′) и без учета угла крена (σγ= 2,5°).
Для подтверждения технической реализуемости заявляемого способа (и системы для его осуществления) ниже приведен пример работы.
После взятия на сопровождение, например воздушной цели типа самолет, из обзорно-прицельной системы (ОПС) в вычислительную систему (ВС) поступают непрерывно сигналы об углах визирования цели β и ε и угловых скоростях ωβ,ωε соответственно в двух плоскостях прицельной системы координат, а также дискретные замеры дальности Д с лазерного дальномера (входящего в состав ОПС). С навигационной системы в ВС поступают также данные о носителе: скорость носителя, углы тангажа, крена и т.п.
Предварительно в ВС вводятся данные об оружии (например, либо в виде таблиц стрельбы, либо в виде таблицы аппроксимирующих коэффициентов). Данные о внешней среде (плотность и температура воздуха, скорость продольного и поперечного ветра) либо вводятся непрерывно с соответствующих датчиков, либо используется информация с метеобюллетеней, заведенная предварительно в ВС.
Для заявляемого способа (и устройства) должно быть предусмотрено введение порогового (допустимого) значения угловой скорости ω
На основании полученной информации в ВС рассчитываются угол прицеливания αo и деривации βo ; в устройстве определения углов упреждения Δβ,Δε рассчитываются кинематические поправки, обусловленные движением цели и носителя Δβ и Δε, а также согласно изобретению угловые поправки на боковой и продольной баллистический ковер, на параллакс ПУ и прицела.
Далее комбинация выработанных поправок по каждому из каналов с учетом угла крена поступает на вход силового привода.
Силовые приводы, отрабатывая управляющие сигналы с учетом сигнала обратной связи, в каждый момент времени разворачивают стволы ПУ в нужном направлении.
Устройство учета угла крена работает следующим образом. На первый, второй, третий и четвертый входы первого и второго сумматоров поступают сигналы соответственно с выхода блоков формирования угла упреждения Δβ(Δε), блоков поправки на баллистический ветер соответственно по горизонтальному и вертикальному каналам, блоков поправки на параллакс соответственно по горизонтальному и вертикальному каналам, блоков выработки углов соответственно прицеливания и деривации.
Полученные таким образом сигналы поступают на первые входы соответственно первого и второго множительных устройств, где происходит перемножение полученных сумм поправок на косинус угла крена cos γ, сигнал о котором поступает на вторые входы этих множительных устройств с cos-го выхода датчика крена.
Далее сигналы с выходов первого и второго множительных устройств поступают на первые входы соответственно третьего и четвертого сумматоров, где происходит суммирование с суммой поправок с перекрестного данному каналу, предварительно перемноженной на синус угла крена.
Примечание. Схема блока учета угла крена состоит из известных устройств типа множительное устройство (МУ), сумматор (СУМ) и т.п., примеры реализации которых (схемы набора на элементах) широко приведены в соответствующей специальной литературе, например /6, 7/.
Таким образом, сигналы с выхода третьего и четвертого сумматоров являются управляющими для силовых приводов соответственно горизонтального и вертикального наведения.
Использование заявляемого способа и реализующей его системы обеспечит по сравнению с существующими следующими преимуществами:
1. Повышение точности и отсюда эффективности стрельбы БМ, особенно по скоростным воздушным целям.
2. Повышение всепогодности БМ.
3. Обеспечивается возможность сохранения существующей структуры СУ БМ, что дает значительную экономию средств и времени.
Источники информации
1. Р. В. Мубаракшин, В. М. Балуев, Б.В. Воронов "Прицельные системы стрельбы", 4.1. М., Издание ВВИА им. проф. Н.Е. Жуковского, 1973, стр. 68 - 70, 90 - 97.
2. Технические условия. Изделие 1B539. Тула, 1984, стр. 17 - 19.
3. Техническое описание боевой машины пехоты БМП-3, Тула, КБП, 1997.
4. Патент России N 2087832. Бюллетень N 23 от 20.08.97.
5. А. А. Коновалов, Ю.В. Николаев. Внешняя баллистика. М., ЦНИИ информации, 1979, стр. 103 - 107.
6. Е. А. Архангельский, А.А. Знаменский и др. "Моделирование на аналоговых вычислительных машинах", Ленинград, изд. "Энергия", 1972 г., стр. 105 - 119.
7. Е.Д. Горбацевич, Ф.Ф. Левинзон "Аналоговое моделирование системы управления", М., изд. "Наука", 1984.


Изобретение относится к области вооружения и военной техники, в частности к защите боевой машины (БМ) от средств воздушного нападения (СВН), например, с помощью пулеметных (пушечных) установок. Технический результат - повышение эффективности стрельбы БМ путем повышения точности определения упрежденной точки (точки встречи снаряда с целью). Технический результат достигается за счет того, что в известном способе защиты БМ, заключающемся в обнаружении и опознавании целей, взятии их на сопровождение, сопровождении цели, определении скорости сближения цели с носителем, вычислении абсолютной начальной скорости снаряда, полетного времени и упрежденной дальности из математических выражений, определении кинематических угловых поправок стрельбы, постоянном отклонении с учетом их стволов ПУ относительно линии визирования и стрельбе по цели, согласно изобретению после определения кинематических угловых поправок Δβ, Δε дополнительно определяют угловые поправки на боковой Wz и продольный Wx баллистический ветер, на параллакс ПУ и прицела для горизонтального и вертикального каналов по математическим выражениям. Технический результат достигается также тем, что в известную систему стрельбы БМ по цели, содержащую обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую устройство определения углов упреждения, согласно изобретению в устройство определения углов упреждения дополнительно вводят блок поправки на баллистический ветер Wx, Wz по горизонтальному каналу, блок поправки на продольный ветер Wx по вертикальному каналу, блок поправки на параллакс по горизонтальному каналу, блок поправки на параллакс по вертикальному каналу, а также блок учета угла крена, причем первый вход блока поправки на баллистический ветер по горизонтальному каналу соединен с выходом блока формирования полетного времени tпол, второй его вход соединен с первым выходом блока формирования упрежденной дальности Ду, третий и четвертый входы - соответственно с третьим и пятым выходами обзорно-прицельной системы, пятый и шестой входы - с выходами блока данных о внешней среде, а выход блока поправки на баллистический ветер по горизонтальному каналу соединен со вторым входом блока учета угла крена; вход блока поправки на параллакс по горизонтальному каналу соединен с пятым выходом обзорно-прицельной системы, а выход его -с третьим входом блока учета угла крена; первый и второй входы блока поправки на продольный ветер по вертикальному каналу соединены соответственно с выходом блока формирования полетного времени tпол первым выходом блока формирования упрежденной дальности Ду, третий и четвертый его входы - соответственно с четвертым и пятым выходами обзорно-прицельной системы, пятый вход - с выходом блока данных о внешней среде, а выход блока поправки на продольный ветер по вертикальному каналу соединен с пятым входом блока учета угла крена; вход блока поправки на параллакс по вертикальному каналу соединен с пятым выходом обзорно-прицельной системы, а выход его -с шестым входом блока учета угла крена, седьмой и восьмой входы которого соединены соответственно с первым и вторым выходами блока угла прицеливания и деривации, девятый вход блока учета угла крена соединен с выходом навигационной системы, а его первый и второй выходы соединены с первыми входами приводов соответственно горизонтального и вертикального наведения. 2 с. и 3 з.п. ф-лы, 1 табл., 12 ил.
по горизонтальному каналу

где 
Δβпар = z0(1/Д-1/Дс),
по вертикальному каналу

где
Δεпар = y0(1/Д-1/Дс),
где
ΔβWz - угловая поправка по горизонтальному каналу на скорость бокового ветра Wz;
ΔαWx - угловая поправка в угол прицеливания на скорость продольного ветра Wx;
Δβt, Δεt - угловая поправка соответственно по горизонтальному и вертикальному каналам из-за погрешности определения полетного времени;
Δt - поправка в полетное время на продольный ветер;
Д, Ду - соответственно дальность до цели и упрежденная дальность;
ωβ, ωε - угловая скорость линии визирования соответственно по горизонтальному и вертикальному каналам;
ω - коэффициенты аппроксимации, бокового отклонения β из-за скорости бокового ветра Wz и отклонения в угле прицеливания -α из-за скорости продольного ветра Wx;
- коэффициенты аппроксимации, бокового отклонения β из-за скорости бокового ветра Wz и отклонения в угле прицеливания -α из-за скорости продольного ветра Wx;
A
zo, yo - величины смещения прицела относительно ПУ соответственно по горизонтальному и вертикальному каналам;
Дc - дальность сведения,
а затем вычисленные угловые поправки: на скорость бокового ветра Wz по горизонтальному каналу ΔβWz, в угол прицеливания α на скорость продольного ветра (по вертикальному каналу) ΔαWx, угловые поправки из-за погрешности определения полетного времени t соответственно в горизонтальном и вертикальном канале Δβt, Δεt, угловые поправки на параллакс прицела и ПУ соответственно по горизонтальному и вертикальному каналам Δβпар, Δεпар суммируют с ранее определенными баллистическими αo, βo и кинематическими  угловыми поправками по соответствующему каналу с учетом угла крена БМ из соотношений
угловыми поправками по соответствующему каналу с учетом угла крена БМ из соотношений
где Δβ, Δε - кинематические угловые поправки на движение цели и носителя соответственно по горизонтальному и вертикальному каналам;
ΔβΣ, ΔεΣ - суммарная угловая поправка соответственно в горизонтальном и вертикальном каналах;
αo, βo соответственно угол прицеливания (вертикальный канал) и деривации (горизонтальный канал);
γ - угол крена БМ.
ΔβWz = -(Wz-vнsinq)(t-Дy/v01)/Дy,
где vн, q - скорость БМ и угол разворота ПУ относительно вертикальной оси БМ;
v01 - абсолютная начальная скорость снаряда;
t, Ду - соответственно полетное время и упрежденная дальность стрельбы.
где Xi-i-й метеобаллистической фактор;
ΔtXi, ΔαXi - отклонение соответственно полетного времени t и угла прицеливания α из-за отклонения от номинального значения i-го метеобаллистического фактора;
Xi = (Wx, H, T. Vo),
X1 = Wx, X2 = H, X3 = T, X4 = Vo,
где Н - давление воздуха;
Т - температура воздуха;
Vo - относительная начальная скорость снаряда.
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАВОДКИ ОРУДИЯ | 1995 |
|
RU2111437C1 |
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |
| СПОСОБ ПОЛУЧЕНИЯ АСБЕСТО-БИТУМНОЙ ЭМУЛЬСИИ | 2000 |
|
RU2158244C1 |
| DE 3332795 A1, 28.03.1985. | |||

