Изобретения относятся к системам видения удаленных объектов с помощью лазерной подсветки в различных участках спектрального диапазона.
Известен способ видения, основанный на подсветке удаленного объекта инфракрасными прожекторами с последующим формированием изображения удаленного объекта с помощью оптико-электронной системы [Карасик В.Е., Орлов В.М. Лазерные системы видения. М.: Изд-во МГТУ им. Н.Э.Баумана, 2001, с.40].
К недостаткам данного способа следует отнести низкую эффективность обнаружения уже на дальностях, превышающих 700-800 м.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является способ видения объектов с помощью лазерной подсветки, включающий подсветку объекта когерентным световым излучением, формирование изображения объекта по отраженному от него упомянутого излучения посредством приемного объектива, запись изображения объекта посредством матрицы приборов с зарядовой связью [Карасик В.Е., Орлов В.М. Лазерные системы видения. М.: Изд-во МГТУ им. Н.Э.Баумана, 2001, с.318 (прототип)].
Данный способ обладает достаточно хорошей эффективностью обнаружения на расстояниях в 2-3 км. К недостаткам данного способа можно отнести низкую эффективность обнаружения объекта в рассеивающей среде, а также отсутствие вспомогательного обеспечения для выделения и маркирования изображений движущихся объектов на фоне неподвижных.
Задачей изобретения является повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, например, в мутной среде, за счет регистрации отраженного от объекта когерентного светового излучения в виде сигналов пространственной частоты. Задачей изобретения также является выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов за счет регистрации световых биений по контуру изображений движущихся объектов или за счет регистрации световых биений по полю изображений подвижных и неподвижных объектов на частотах радиодиапазона.
Поставленная задача - повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, а также выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов - решается за счет того, что в способе видения объектов с помощью лазерной подсветки, включающем подсветку объекта когерентным световым излучением, формирование изображения объекта по отраженному от него упомянутому излучению посредством приемного объектива, запись изображения объекта посредством матрицы приборов с зарядовой связью, фотоэлементы матрицы приборов с зарядовой связью разделяют в линейные или матричные группы, на каждую из выделенных групп фотоэлементов проецируют систему интерференционных полос стоячей световой волны когерентного светового излучения путем размещения между приемным объективом и выделенными группами фотоэлементов матрицы приборов с зарядовой связью отражающего зеркала, частично пропускающего световое излучение, а между приемным объективом и отражающим зеркалом периодической структуры, образованной тонкослойными элементами, толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, при этом периодическая структура расположена под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, при этом период s периодической структуры выбирают из соотношения s<d, а регистрацию системы интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе фотоэлементов осуществляют в виде сигнала пространственной частоты за счет того, что полученные с фотоэлементов электрические сигналы регистрируют в зависимости от местоположения этих фотоэлементов в линейной или матричной группе матрицы приборов с зарядовой связью и анализируют, затем получают изображение объекта на мониторе.
При этом период фотоэлементов p в ряду группы задают относительно размера входного окна b этих фотоэлементов в том же ряду в пределах p=(2-100)b.
Кроме того, матрицу приборов с зарядовой связью устанавливают с возможностью вращения вокруг оси, совпадающей с направлением распространения упомянутого светового излучения.
Известно устройство видения, содержащее инфракрасный прожектор, обеспечивающий подсветку удаленного объекта, и оптико-электронную систему, формирующую изображение упомянутого объекта [Карасик В.Е., Орлов В.М. Лазерные системы видения. М.: Изд-во МГТУ им. Н.Э.Баумана, 2001, с.40].
К недостаткам данного устройства видения следует отнести низкую эффективность обнаружения уже на дальностях, превышающих 700-800 м.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является устройство видения объектов с помощью лазерной подсветки, включающее передающий канал, содержащий лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий приемный объектив и матрицу приборов с зарядовой связью, содержащую фотоэлементы, блок обработки данных и монитор [Карасик В.Е., Орлов В.М. Лазерные системы видения. М.: Изд-во МГТУ им. Н.Э.Баумана, 2001, с.318 (прототип)].
Данное устройство видения объектов с помощью лазерной подсветки обладает достаточно хорошей эффективностью обнаружения на расстояниях в 2-3 км. К недостаткам данного устройства можно отнести низкую эффективность обнаружения объекта в рассеивающей среде, а также отсутствие вспомогательного обеспечения для выделения и маркирования изображений движущихся объектов на фоне неподвижных.
Задачей изобретения является повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, например, в мутной среде, за счет регистрации отраженного от объекта когерентного светового излучения в виде сигналов пространственной частоты. Задачей изобретения также является выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов за счет регистрации световых биений по контуру изображений движущихся объектов или за счет регистрации световых биений по полю изображений подвижных и неподвижных объектов на частотах радиодиапазона.
Поставленная задача - повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, а также выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов - решается за счет того, что в устройстве видения объектов с помощью лазерной подсветки, включающем передающий канал, содержащий лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий приемный объектив и матрицу приборов с зарядовой связью, содержащую фотоэлементы, блок обработки данных и монитор, приемный канал дополнительно содержит оптически сопряженные отражающее зеркало, выполненное частично пропускающим световое излучение и установленное между приемным объективом и матрицей приборов с зарядовой связью, и периодическую структуру, образованную тонкослойными элементами толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, размещенную между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, а блок обработки данных дополнительно содержит спектроанализатор.
Кроме того, устройство видения объектов с помощью лазерной подсветки может быть дополнительно снабжено экраном, ограничивающим размеры входных окон фотоэлементов, установленным на матрице приборов с зарядовой связью со стороны отражающего зеркала, при этом периодическая структура и отражающее зеркало выполнены с возможностью смещения относительно экрана и матрицы приборов с зарядовой связью, содержащей фотоэлементы.
При этом матрица приборов с зарядовой связью, содержащая фотоэлементы, может быть установлена с возможностью ее разворота по оптической оси приемного канала.
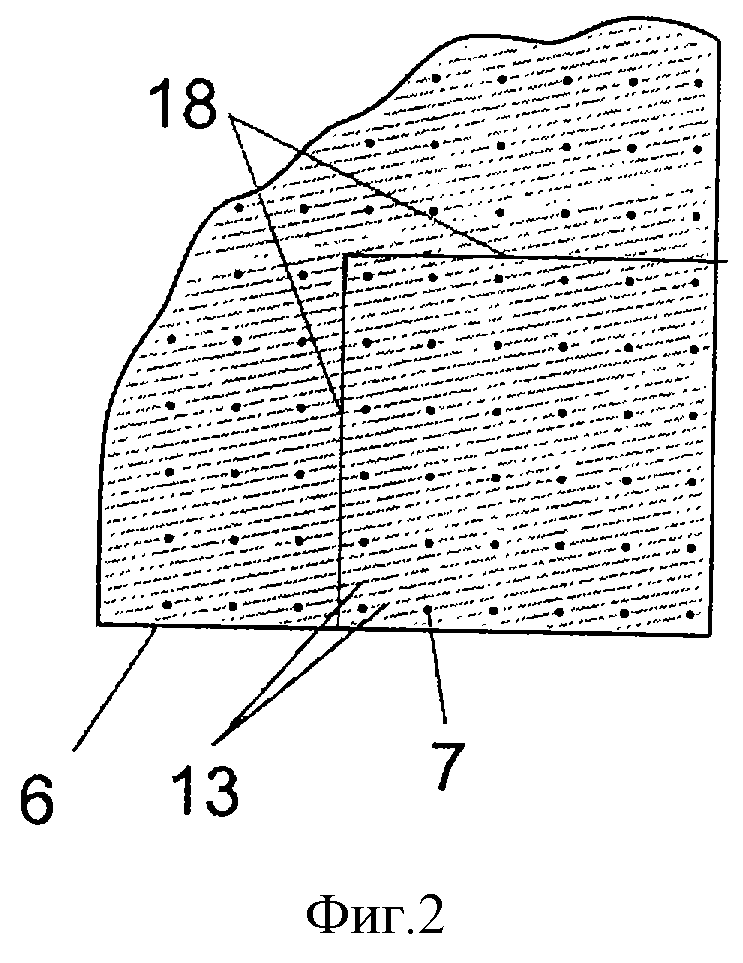
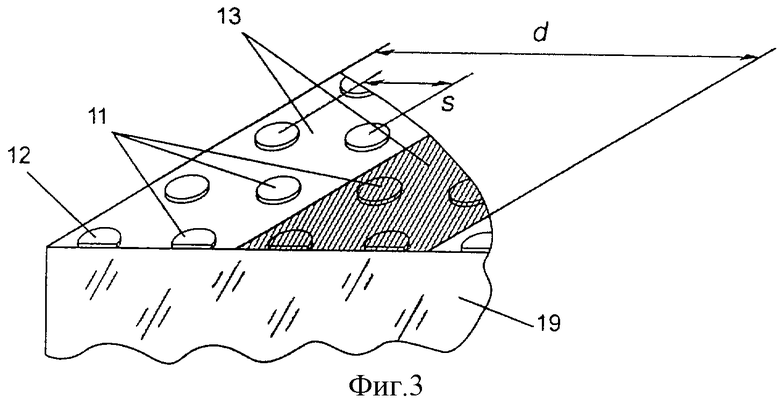
Сущность изобретения поясняется чертежами, на которых представлена схема устройства видения объектов с помощью лазерной подсветки (фиг.1), схема расположения системы интерференционных полос на выделенной матричной группе фотоэлементов матрицы приборов с зарядовой связью (фиг.2) и схема расположения тонкослойных элементов в периодической структуре (фиг.3).
Устройство видения объектов с помощью лазерной подсветки включает передающий канал 1, содержащий лазер 2 и оптическую систему 3 формирования лазерного пучка, приемный канал 4, содержащий приемный объектив 5 и матрицу 6 приборов с зарядовой связью, содержащую фотоэлементы 7, блок 8 обработки данных и монитор 9. Приемный канал 4 дополнительно содержит оптически сопряженные отражающее зеркало 10, выполненное частично пропускающим световое излучение и установленное между приемным объективом 5 и матрицей 6 приборов с зарядовой связью, и периодическую структуру 11, образованную тонкослойными элементами 12 толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, размещенную между приемным объективом 5 и отражающим зеркалом 6 под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой 11 и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, система 13 которых образуется в периодической структуре 11 с тонкослойными элементами 12 (фиг.3), а блок 8 обработки данных дополнительно содержит спектроанализатор 14.
Кроме того, устройство видения объектов с помощью лазерной подсветки может быть дополнительно снабжено экраном 15, ограничивающим размеры входных окон 16 фотоэлементов 7, установленным на матрице 6 приборов с зарядовой связью, при этом периодическая структура 11 и отражающее зеркало 10 выполнены с возможностью смещения относительно экрана 15 и матрицы 6 приборов с зарядовой связью, содержащей фотоэлементы 7.
При этом матрица 6 приборов с зарядовой связью, содержащая фотоэлементы 7, может быть установлена с возможностью ее разворота по оптической оси приемного канала 4.
Устройство видения объектов с помощью лазерной подсветки снабжено блоком 17 управления. Фотоэлементы 7 матрицы 6 приборов с зарядовой связью разделяют в линейные или матричные группы 18 (фиг.2). На каждую из выделенных групп 18 фотоэлементов 7 проецируют систему 13 интерференционных полос стоячей световой волны упомянутого когерентного светового излучения.
Тонкослойные элементы 12 периодической структуры 11 выполнены из тонкого частично пропускающего слоя толщиной не более λ/2,, рассеивающего энергию электрического поля стоячей световой волны, и расположены в плоскости этого слоя. Период s периодической структуры 11 выбирают из соотношения s<d и исходя из размеров входных окон 16 фотоэлементов 7 задают s=d/4. Элементы 12 могут быть расположены на одной из поверхностей оптического клина 19 (фиг. 3). Отражающее зеркало 10 при этом может быть выполнено на другой поверхности оптического клина 19 в виде отражающего покрытия с коэффициентом отражения 0,50-0,99 и коэффициентом пропускания 0,01-0,50 (фиг.1).
Смещение периодической структуры 11 и отражающего зеркала 10 относительно экрана 15 и матрицы 6 приборов с зарядовой связью в направлении чередования интерференционных полос упомянутой системы 13 (т.е. в направлении, перпендикулярном интерференционным полосам в плоскости отражающего зеркала 10 или в плоскости периодической структуры 11) достигается за счет ультразвуковой вибрации оптического клина 19 при присоединении пьезоэлемента 20 к основанию оптического клина 19. Питание пьезоэлемента 20 осуществляется от ультразвукового генератора 21.
При использовании оптического клина 19 угол ϕ между плоскостью периодической структуры 11 и плоскостью отражающего зеркала 10 задан из соотношения sinϕ = λ/2dn, где λ- длина световой волны; d - период интерференционных полос, система 13 которых образуется в периодической структуре 11 с тонкослойными элементами 12, n - показатель преломления материала оптического клина 19.
Заявленный способ видения объектов с помощью лазерной подсветки осуществляется на настоящем устройстве следующим образом.
Через блок 17 управления включается лазер 2 и осуществляется подсветка объекта когерентным световым излучением. Затем по отраженному от объекта упомянутому излучению при помощи приемного объектива 5 формируется изображение объекта и запись изображения объекта посредством матрицы 6 приборов с зарядовой связью. Так как на каждую из выделенных групп 18 фотоэлементов 7 спроецирована система 13 интерференционных полос стоячей световой волны упомянутого когерентного светового излучения с периодом d, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой 11 и волновым фронтом упомянутого когерентного светового излучения, λ- длина световой волны, регистрацию системы 13 интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе 18 фотоэлементов 7 осуществляют в виде сигнала пространственной частоты за счет того, что полученные с фотоэлементов 7 электрические сигналы регистрируют в зависимости от местоположения фотоэлементов 7 в линейной или матричной группе 18 матрицы 6 приборов с зарядовой связью и анализируют. Затем, используя выделенные таким образом электрические сигналы с каждой группы 18 матрицы 6 приборов с зарядовой связью, получают изображение объекта на мониторе 9.
При этом за счет смещения изображения интерференционных полос упомянутой системы 13 относительно фотоэлементов 7 матрицы 6 при помощи пьезоэлемента 20 обеспечивается также и временная модуляция упомянутого светового излучения. Период p фотоэлементов 7 в ряду матрицы 6 задают относительно размера b входного окна 16 фотоэлементов 7 в том же ряду в пределах p=(2-100)b. При этом период d интерференционных полос упомянутой системы 13 задают в пределах p= (2-100)d. Записанные электрические сигналы подвергаются преобразованию Фурье на спектроанализаторе 14, на выходе которого получают их частотное преобразование. При выполнении матрицы 6 с зарядовой связью с возможностью ее разворота по оптической оси устройства записанные электрические сигналы подвергаются преобразованию Фурье на спектроанализаторе 14 по двум пространственным координатам. При этом достигается высокое разрешение длин волн отраженного когерентного светового излучения на каждой линейной или матричной группе 18. При этом световое излучение, рассеянное на крупных неоднородностях, содержащихся, например, в мутной воде, и являющееся некогерентной фоновой засветкой, в виде сигнала пространственной частоты не выделяется.
Выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов осуществляется следующим образом. Когерентное световое излучение, отраженное по контуру движущегося объекта, поступает через приемный объектив 5 на соседние тонкослойные элементы 12 и отражающее зеркало 10. При этом происходит когерентное рассеяние светового излучения, в веществе тонкого слоя из которого выполнены тонкослойные элементы 12, и два соседних тонкослойных элемента 12 представляют собой два вторичных источника с перекрывающимися интерферирующими пучками. Так как на один из этих вторичных источников поступает световое излучение, отразившееся от подвижного объекта, а на другой - отразившееся от неподвижного объекта, то при интерференции перекрывающихся пучков за счет эффекта Доплера возникают световые биения, которые регистрируются одним из фотоэлементов 7 матрицы 6 приборов с зарядовой связью. Таким образом получают модулированные электрические сигналы с выделенных матричных или линейных групп 18, записанные по контуру изображения движущего объекта. Представление на мониторе 9 этих сигналов осуществляют, например, также в виде световой модуляции воспринимаемой наблюдателем частоты, или в виде маркирования изображения движущегося объекта цветной линией. При этом также возможно определение скорости движения подвижного объекта относительно неподвижных объектов в направлении движущегося или неподвижного наблюдателя.
Поставленная задача - повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, а также выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов - решается за счет того, что в способе видения объектов с помощью лазерной подсветки, включающем подсветку объекта когерентным световым излучением, формирование изображения объекта по отраженному от него упомянутому излучению посредством приемного объектива, запись изображения объекта посредством матрицы приборов с зарядовой связью, фотоэлементы в которой расположены с периодом p в ряду и с размером b входного окна этих фотоэлементов в том же ряду, фотоэлементы матрицы приборов с зарядовой связью разделяют на группы, в которых фотоэлементы располагают двумя параллельными рядами со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода p, размер b входных окон этих фотоэлементов задают не больше половины периода p, на каждую из выделенных групп фотоэлементов проецируют систему интерференционных полос стоячей световой волны когерентного светового излучения путем размещения между приемным объективом и выделенными группами фотоэлементов матрицы приборов с зарядовой связью отражающего зеркала, частично пропускающего световое излучение, и тонкого частично пропускающего слоя толщиной не более λ/2, рассеивающего или поглощающего энергию электрического поля стоячей световой волны, расположенного между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, система которых образуется в тонком частично пропускающем слое при воздействии стоячей световой волны, при этом регистрацию системы интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе фотоэлементов осуществляют в виде сигнала пространственной частоты за счет того, что полученные с фотоэлементов электрические сигналы регистрируют в зависимости от местоположения этих фотоэлементов в группе матрицы приборов с зарядовой связью поочередно из каждого ряда и анализируют, затем получают изображение объекта на мониторе.
При этом возможно получение каждого последующего кадра изображения объекта на мониторе при регистрации электрических сигналов с групп матрицы приборов с зарядовой связью при их выделении на участках матрицы приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов или рядов в группах, выделенных для получения изображения объекта на мониторе в предыдущем кадре изображения.
Кроме того, регистрацию, анализ и получение изображения объекта на мониторе осуществляют для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Поставленная задача может быть решена за счет того, что в устройстве видения объектов с помощью лазерной подсветки, включающем передающий канал, содержащий лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий приемный объектив и матрицу приборов с зарядовой связью с фотоэлементами, которые расположены с периодом p в ряду и с размером b входного окна этих фотоэлементов в том же ряду и разделены в матричные группы, блок обработки данных и монитор, приемный канал дополнительно содержит оптически сопряженные отражающее зеркало, выполненное частично пропускающим световое излучение и установленное между приемным объективом и матрицей приборов с зарядовой связью, и тонкий частично пропускающий слой толщиной не более λ/2, рассеивающий или поглощающий энергию электрического поля стоячей световой волны и расположенный между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем и волновым фронтом световой волны, λ- длина световой волны, d - период интерференционных полос, система которых образуется в тонком частично пропускающем слое при воздействии стоячей световой волны, а блок обработки данных дополнительно содержит спектроанализатор, кроме того, приемный канал дополнительно снабжен экраном, ограничивающим размер b входных окон фотоэлементов, установленным на матрице приборов с зарядовой связью со стороны отражающего зеркала, а каждая матричная группа выполнена в виде двух параллельных рядов фотоэлементов со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода р.
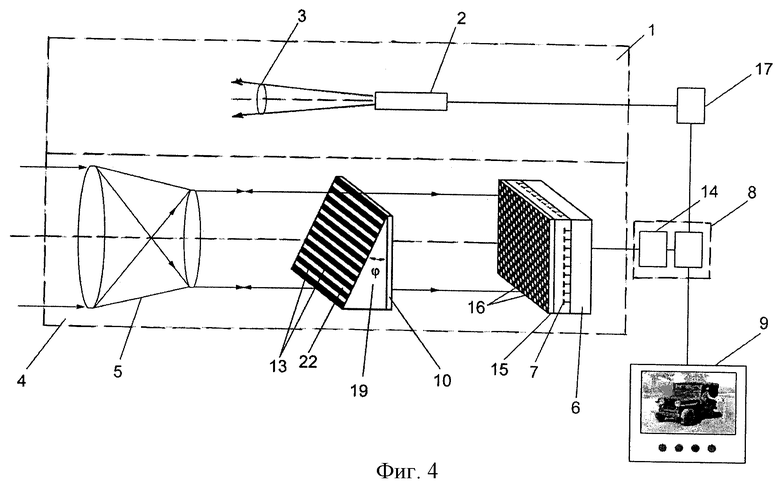
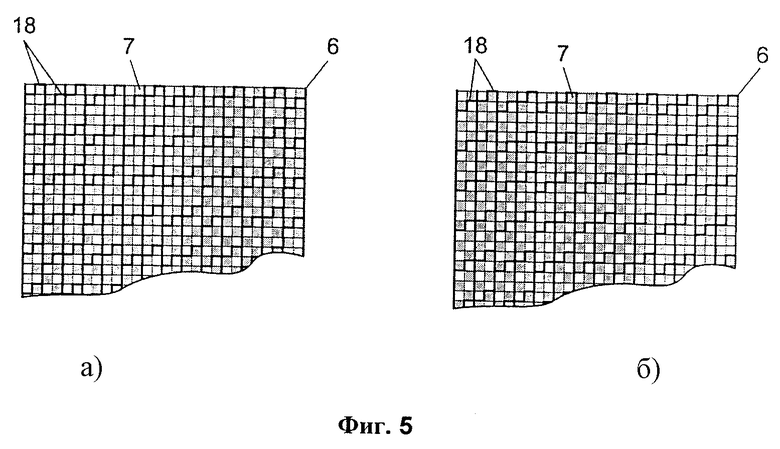
Сущность изобретения поясняется чертежами, на которых представлена схема устройства видения объектов с помощью лазерной подсветки (фиг.4) и схема расположения матричных групп фотоэлементов на участке матрицы приборов с зарядовой связью для получения изображения объекта на мониторе для двух последовательных кадров изображения (фиг.5).
Устройство видения объектов с помощью лазерной подсветки включает передающий канал 1, содержащий лазер 2 и оптическую систему 3 формирования лазерного пучка, приемный канал 4, содержащий приемный объектив 5 и матрицу 6 приборов с зарядовой связью с фотоэлементами 7, которые расположены с периодом p в ряду и с размером b входного окна 16 этих фотоэлементов 7 в том же ряду и разделены в матричные группы 18, блок 8 обработки данных и монитор 9. Приемный канал 4 дополнительно содержит оптически сопряженные отражающее зеркало 10, выполненное частично пропускающим световое излучение и установленное между приемным объективом 5 и матрицей 6 приборов с зарядовой связью, и тонкий частично пропускающий слой 22 толщиной не более λ/2, рассеивающий или поглощающий энергию электрического поля стоячей световой волны и расположенный между приемным объективом 5 и отражающим зеркалом 10 под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем 22 и волновым фронтом световой волны, λ- длина световой волны, d - период интерференционных полос, система 13 которых образуется в тонком частично пропускающем слое 22 при воздействии стоячей световой волны, а блок 8 обработки данных дополнительно содержит спектроанализатор 14. Кроме того, приемный канал 4 дополнительно снабжен экраном 15, ограничивающим размер b входных окон 16 фотоэлементов 7, установленным на матрице 6 приборов с зарядовой связью со стороны отражающего зеркала 10, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 7 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p (фиг. 4). Устройство видения объектов с помощью лазерной подсветки снабжено блоком 17 управления.
Тонкий частично пропускающий слой 22 может быть нанесен на одну из поверхностей оптического клина 19. Отражающее зеркало 10 при этом может быть выполнено на другой поверхности оптического клина 19 в виде отражающего покрытия с коэффициентом отражения 0,50-0,99 и коэффициентом пропускания 0,01-0,50. При использовании оптического клина 19 угол ϕ между плоскостью тонкого частично пропускающего слоя 22 и плоскостью отражающего зеркала 10 задан из соотношения sinϕ = λ/2dn, где λ- длина световой волны; d - период системы 13 интерференционных полос, n - показатель преломления материала оптического клина 19.
Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Заявленный способ видения объектов с помощью лазерной подсветки осуществляется на настоящем устройстве следующим образом.
Через блок 17 управления включается лазер 2 и осуществляется подсветка объекта когерентным световым излучением. Затем по отраженному от объекта упомянутому излучению при помощи приемного объектива 5 формируется изображение упомянутого объекта и запись изображения объекта посредством матрицы 6 приборов с зарядовой связью. Так как на каждую из выделенных групп 18 фотоэлементов 7 спроецирована система 13 интерференционных полос стоячей световой волны упомянутого когерентного светового излучения с периодом d, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем 22 и волновым фронтом упомянутого когерентного светового излучения, λ- длина световой волны, регистрацию системы 13 интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе 18 фотоэлементов 7 осуществляют в виде сигнала пространственной частоты. За счет того, что приемный канал 4 дополнительно снабжен экраном 15, установленным на матрице 6 приборов с зарядовой связью со стороны отражающего зеркала 10 и задающим размер b входных окон 16 фотоэлементов 7 не больше половины периода p, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 7 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p, полученные с фотоэлементов 7 электрические сигналы регистрируют в виде их зависимости от местоположения фотоэлементов 7 в группе 18 матрицы 6 приборов с зарядовой связью поочередно из каждого ряда. Записанные электрические сигналы подвергаются преобразованию Фурье на спектроанализаторе 14, на выходе которого получают их частотное преобразование. При этом достигается хорошее разрешение длин волн отраженного когерентного светового излучения на каждой матричной группе 18. Это позволяет выделять сигнал с каждой группы 18 определенной пространственной частоты и получать из этих сигналов изображение объекта на мониторе 9. При этом световое излучение, рассеянное на крупных неоднородностях, содержащихся, например, в мутной воде, и являющееся некогерентной фоновой засветкой, в виде сигнала пространственной частоты не выделяется. Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Регистрацию, анализ и получение изображения объекта на мониторе 9 осуществляют в соответствии со схемой стробирования для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Поставленная задача - повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, а также выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов - решается за счет того, что в способе видения объектов с помощью лазерной подсветки, включающем подсветку объекта когерентным световым излучением, формирование изображения объекта по отраженному от него упомянутому излучению посредством приемного объектива, запись изображения объекта посредством матрицы приборов с зарядовой связью, фотоэлементы матрицы приборов с зарядовой связью разделяют на группы, в которых упомянутые фотоэлементы располагают двумя параллельными рядами со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода р, размер b входных окон этих фотоэлементов задают не больше половины периода p, на каждую из выделенных групп фотоэлементов проецируют систему интерференционных полос стоячей световой волны когерентного светового излучения путем размещения между приемным объективом и выделенными группами фотоэлементов матрицы приборов с зарядовой связью отражающего зеркала, частично пропускающего световое излучение, а между приемным объективом и отражающим зеркалом периодической структуры, образованной тонкослойными элементами толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, при этом периодическая структура расположена под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, при этом период s периодической структуры выбирают из соотношения s<d, а регистрацию системы интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе фотоэлементов осуществляют в виде сигнала пространственной частоты за счет того, что полученные с фотоэлементов электрические сигналы регистрируют в зависимости от местоположения этих фотоэлементов в группе матрицы приборов с зарядовой связью поочередно из каждого ряда и анализируют, затем получают изображение объекта на мониторе.
При этом возможно получение каждого последующего кадра изображения объекта на мониторе при регистрации электрических сигналов с групп матрицы приборов с зарядовой связью при их выделении на участках матрицы приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов или рядов в группах, выделенных для получения изображения объекта на мониторе в предыдущем кадре изображения.
Кроме того, регистрацию, анализ и получение изображения объекта на мониторе осуществляют для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Поставленная задача может быть решена за счет того, что в устройстве видения объектов с помощью лазерной подсветки, включающем передающий канал, содержащий лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий приемный объектив и матрицу приборов с зарядовой связью с фотоэлементами, которые расположены с периодом p в ряду и с размером b входного окна этих фотоэлементов в том же ряду и разделены в матричные группы, блок обработки данных и монитор, приемный канал дополнительно содержит оптически сопряженные отражающее зеркало, выполненное частично пропускающим световое излучение и установленное между приемным объективом и матрицей приборов с зарядовой связью, и периодическую структуру, образованную тонкослойными элементами толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, размещенную между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, а блок обработки данных дополнительно содержит спектроанализатор, кроме того, приемный канал дополнительно снабжен экраном, ограничивающим размер b входных окон фотоэлементов, установленным на периодической системе со стороны отражающего зеркала, а каждая матричная группа выполнена в виде двух параллельных рядов фотоэлементов со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода р.
Сущность изобретения поясняется чертежами, на которых представлена схема устройства видения объектов с помощью лазерной подсветки (фиг.4), схема расположения матричных групп фотоэлементов на участке матрицы приборов с зарядовой связью для получения изображения объекта на мониторе для двух последовательных кадров изображения (фиг.5) и схема расположения тонкослойных элементов в периодической структуре (фиг.3).
Устройство видения объектов с помощью лазерной подсветки включает передающий канал 1, содержащий лазер 2 и оптическую систему 3 формирования лазерного пучка, приемный канал 4, содержащий приемный объектив 5 и матрицу 6 приборов с зарядовой связью с фотоэлементами 7, которые расположены с периодом p в ряду и с размером b входного окна 16 этих фотоэлементов в том же ряду и разделены в матричные группы 18, блок 8 обработки данных и монитор 9. Приемный канал 4 дополнительно содержит оптически сопряженные отражающее зеркало 10, выполненное частично пропускающим световое излучение и установленное между приемным объективом 5 и матрицей 6 приборов с зарядовой связью, и периодическую структуру 11, образованную тонкослойными элементами 12 толщиной не более λ/2, рассеивающими энергию электрического поля стоячей световой волны и расположенными в одной плоскости с периодом s, размещенную между приемным объективом 5 и отражающим зеркалом 10 под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой 11 и волновым фронтом когерентного светового излучения, λ- длина световой волны, d - период интерференционных полос, система 13 которых образуется в периодической структуре 11 с тонкослойными элементами 12, а блок 8 обработки данных дополнительно содержит спектроанализатор 14. Кроме того, приемный канал 4 дополнительно снабжен экраном 15, ограничивающим размер b входных окон 16 фотоэлементов 7, установленным на матрице 6 приборов с зарядовой связью со стороны отражающего зеркала 10, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 8 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p (фиг.4). Устройство видения объектов с помощью лазерной подсветки снабжено блоком 17 управления.
Тонкослойные элементы 12 периодической структуры 11 выполнены из тонкого частично пропускающего слоя 22 толщиной не более λ/2, рассеивающего энергию электрического поля стоячей световой волны, и расположены в плоскости слоя 22. Период d периодической структуры 11 выбирают из соотношения s<d и исходя из размеров входных окон 16 фотоэлементов 7 задают s=d/4 (фиг.3). Элементы 12 могут быть расположены на одной из поверхностей оптического клина 19 (фиг.3). Отражающее зеркало 10 при этом может быть выполнено на другой поверхности оптического клина 19 в виде отражающего покрытия с коэффициентом отражения 0,50-0,99 и коэффициентом пропускания 0,01-0,50 (фиг.4). При использовании оптического клина 19 угол ϕ между плоскостью тонкого частично пропускающего слоя 22 и плоскостью отражающего зеркала 10 задан из соотношения sinϕ = λ/2dn, где λ- длина световой волны; d - период системы 13 интерференционных полос, n - показатель преломления материала оптического клина 19.
Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Заявленный способ видения объектов с помощью лазерной подсветки осуществляется на настоящем устройстве следующим образом.
Через блок 17 управления включается лазер 2 и осуществляется подсветка объекта когерентным световым излучением. Затем по отраженному от объекта упомянутому излучению при помощи приемного объектива 5 формируется изображение упомянутого объекта и запись изображения объекта посредством матрицы 6 приборов с зарядовой связью. Так как на каждую из выделенных групп 18 фотоэлементов 7 спроецирована система 13 интерференционных полос стоячей световой волны упомянутого когерентного светового излучения с периодом d, определяемым из соотношения sinθ = λ/2d, где θ- угол между периодической структурой 11 и волновым фронтом когерентного светового излучения, λ- длина световой волны, регистрацию системы 13 интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе 18 фотоэлементов осуществляют в виде сигнала пространственной частоты. За счет того, что приемный канал 1 дополнительно снабжен экраном 15, установленным на матрице 6 приборов с зарядовой связью со стороны отражающего зеркала 10 и задающим размер b входных окон 16 фотоэлементов 7 не больше половины периода p, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 7 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p, полученные с фотоэлементов 7 электрические сигналы регистрируют в виде их зависимости от местоположения фотоэлементов 7 в группе 18 матрицы 6 приборов с зарядовой связью поочередно из каждого упомянутого ряда. Записанные электрические сигналы подвергаются преобразованию Фурье на спектроанализаторе 14, на выходе которого получают их частотное преобразование. При этом достигается хорошее разрешение длин волн отраженного когерентного светового излучения на каждой или матричной группе 18. Это позволяет выделять сигнал с каждой группы 18 определенной пространственной частоты и получать из этих сигналов изображение объекта на мониторе 9. При этом световое излучение, рассеянное на крупных неоднородностях, содержащихся, например, в мутной воде, и являющееся некогерентной фоновой засветкой, в виде сигнала пространственной частоты не выделяется. Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Регистрацию, анализ и получение изображения объекта на мониторе 9 осуществляют в соответствии со схемой стробирования для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов осуществляется следующим образом. Когерентное световое излучение, отраженное по контуру движущегося объекта, поступает через приемный объектив 5 на соседние тонкослойные элементы 12 и отражающее зеркало 10. При этом происходит когерентное рассеяние светового излучения в веществе тонкого слоя 22 и два соседних тонкослойных элемента 12 представляют собой два вторичных источника с перекрывающимися интерферирующими пучками. Так как на один из этих вторичных источников поступает световое излучение, отразившееся от подвижного объекта, а на другой - отразившееся от неподвижного объекта, то при интерференции перекрывающихся пучков за счет эффекта Допплера возникают световые биения, которые регистрируются одним из фотоэлементов 7 матрицы 6 приборов с зарядовой связью. Таким образом получают модулированные электрические сигналы с выделенных матричных или линейных групп 18, записанные по контуру изображения движущего объекта. Представление на мониторе 9 этих сигналов осуществляют, например, также в виде световой модуляции воспринимаемой наблюдателем частоты или в виде маркирования изображения движущегося объекта цветной линией. При этом также возможно определение скорости движения подвижного объекта относительно неподвижных объектов в направлении движущегося или неподвижного наблюдателя.
Поставленная задача - повышение эффективности обнаружения объекта в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, а также выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов - решается за счет того, что в способе видения объектов с помощью лазерной подсветки, включающем подсветку объекта первым когерентным источником светового излучения, формирование изображения объекта по отраженному от него лазерному излучению посредством приемного объектива, запись изображения объекта посредством матрицы приборов с зарядовой связью с фотоэлементами, которые расположены с периодом p в ряду и с размером b входного окна этих фотоэлементов в том же ряду, фотоэлементы матрицы приборов с зарядовой связью разделяют в линейные или матричные группы, на каждую из выделенных групп фотоэлементов проецируют систему интерференционных полос стоячей световой волны первого когерентного источника светового излучения путем размещения между приемным объективом и выделенными группами фотоэлементов матрицы приборов с зарядовой связью отражающего зеркала, частично пропускающего световое излучение, и тонкого частично пропускающего слоя толщиной не более λ/2, рассеивающего или поглощающего энергию электрического поля стоячей световой волны, расположенного между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем и волновым фронтом светового излучения от первого когерентного источника, λ = c/υ1- длина световой волны от первого когерентного источника, с - скорость света,  частота светового излучения от первого когерентного источника, d - период интерференционных полос, система которых образуется в тонком частично пропускающем слое при воздействии стоячей световой волны, кроме того, на упомянутый тонкий частично пропускающий слой дополнительно воздействуют стоячей световой волной от второго когерентного источника светового излучения с частотой υ2, определяемой из выражения υ2 = υ1±F, где F - частота биений, которую задают в диапазоне 0-6•1012 Гц, путем направления светового излучения от второго когерентного источника светового излучения на упомянутые тонкий частично пропускающий слой и отражающее зеркало, при этом регистрацию системы интерференционных полос стоячей световой волны с периодом d осуществляют за счет того, что полученные с каждой выделенной группы фотоэлементов электрические сигналы подвергают преобразованию по пространственной координате и координате времени, а затем получают изображение объекта на мониторе.
частота светового излучения от первого когерентного источника, d - период интерференционных полос, система которых образуется в тонком частично пропускающем слое при воздействии стоячей световой волны, кроме того, на упомянутый тонкий частично пропускающий слой дополнительно воздействуют стоячей световой волной от второго когерентного источника светового излучения с частотой υ2, определяемой из выражения υ2 = υ1±F, где F - частота биений, которую задают в диапазоне 0-6•1012 Гц, путем направления светового излучения от второго когерентного источника светового излучения на упомянутые тонкий частично пропускающий слой и отражающее зеркало, при этом регистрацию системы интерференционных полос стоячей световой волны с периодом d осуществляют за счет того, что полученные с каждой выделенной группы фотоэлементов электрические сигналы подвергают преобразованию по пространственной координате и координате времени, а затем получают изображение объекта на мониторе.
Кроме того, фотоэлементы матрицы приборов с зарядовой связью разделяют на группы, в которых фотоэлементы располагают двумя параллельными рядами со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода p, размер b входных окон этих фотоэлементов задают не больше половины периода p, а регистрацию системы интерференционных полос стоячей световой волны с периодом d в каждой выделенной группе фотоэлементов осуществляют в виде сигнала пространственной частоты за счет того, что полученные с фотоэлементов электрические сигналы регистрируют в зависимости от местоположения этих фотоэлементов в группе матрицы приборов с зарядовой связью поочередно из каждого ряда и анализируют, затем получают изображение объекта на мониторе.
При этом возможно получение каждого последующего кадра изображения объекта на мониторе при регистрации электрических сигналов с групп матрицы приборов с зарядовой связью при их выделении на участках матрицы приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов или рядов в группах, выделенных для получения изображения объекта на мониторе в предыдущем кадре изображения.
Кроме того, регистрацию, анализ и получение изображения объекта на мониторе осуществляют для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Поставленная задача может быть решена за счет того, что в устройстве видения объектов с помощью лазерной подсветки, включающем передающий канал, содержащий первый лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий приемный объектив и матрицу приборов с зарядовой связью с фотоэлементами, которые расположены с периодом p в ряду и с размером b входного окна этих фотоэлементов в том же ряду и разделены в линейные или матричные группы, блок обработки данных и монитор, приемный канал дополнительно содержит оптически сопряженные отражающее зеркало, выполненное частично пропускающим световое излучение и установленное между приемным объективом и матрицей приборов с зарядовой связью, и тонкий частично пропускающий слой толщиной не более λ/2, рассеивающий или поглощающий энергию электрического поля стоячей световой волны и расположенный между приемным объективом и отражающим зеркалом под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем и волновым фронтом световой волны, λ = c/υ1- длина световой волны первого лазера, с - скорость света, υ1- частота светового излучения первого лазера, d - период интерференционных полос, система которых образуется в тонком частично пропускающем слое при воздействии стоячей световой волны, а блок обработки данных дополнительно содержит спектроанализатор, при этом устройство видения объектов с помощью лазерной подсветки дополнительно снабжено светоделительным элементом, расположенным между тонким частично пропускающим слоем и приемным объективом, и вторым лазером с частотой υ2 светового излучения, определяемой из выражения υ2 = υ1±F, где F - частота биений, которую задают в диапазоне 0-6•1012 Гц, оптически сопряженным со светоделительным элементом.
При этом устройство видения объектов с помощью лазерной подсветки дополнительно снабжено экраном, ограничивающим размер b входных окон фотоэлементов, установленным на матрице приборов с зарядовой связью, а каждая матричная группа выполнена в виде двух параллельных рядов фотоэлементов со сдвигом фотоэлементов одного ряда по отношению к другому на половину периода p.
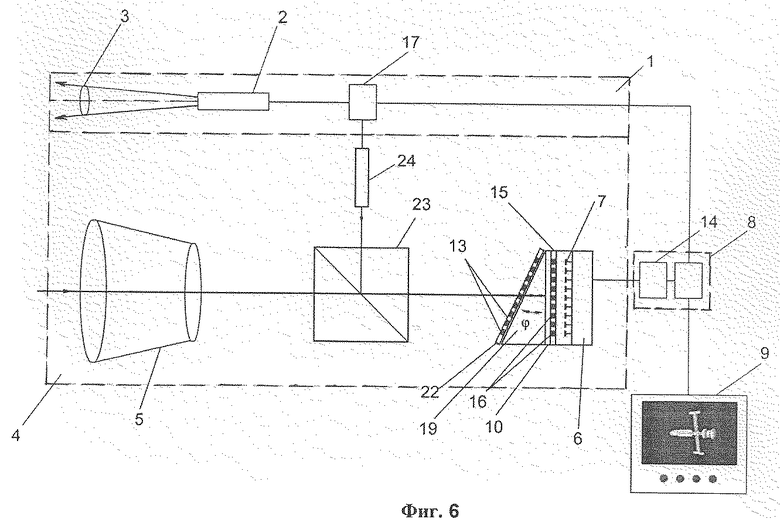
Сущность изобретения поясняется чертежами, на которых представлена схема устройства видения объектов с помощью лазерной подсветки (фиг.6), схема расположения матричных групп фотоэлементов на участке матрицы приборов с зарядовой связью для получения изображения объекта на мониторе для двух последовательных кадров изображения (фиг.5).
Устройство видения объектов с помощью лазерной подсветки, включающее передающий канал 1, содержащий первый лазер 2 и оптическую систему 3 формирования лазерного пучка, приемный канал 4, содержащий приемный объектив 5 и матрицу 6 приборов с зарядовой связью с фотоэлементами 7, которые расположены с периодом p в ряду и с размером b входного окна 16 этих фотоэлементов 7 в том же ряду и разделены в линейные или матричные группы 18, блок 8 обработки данных и монитор 9. Приемный канал 4 дополнительно содержит оптически сопряженные отражающее зеркало 10, выполненное частично пропускающим световое излучение и установленное между приемным объективом 5 и матрицей 6 приборов с зарядовой связью, и тонкий частично пропускающий слой 22 толщиной не более λ/2, рассеивающий или поглощающий энергию электрического поля стоячей световой волны и расположенный между приемным объективом 5 и отражающим зеркалом 10 под углом θ, определяемым из соотношения sinθ = λ/2d, где θ- угол между тонким частично пропускающим слоем 22 и волновым фронтом световой волны, λ = c/υ1- длина световой волны первого лазера 2, с - скорость света, υ1- частота светового излучения первого лазера 2, d - период интерференционных полос, система 13 которых образуется в тонком частично пропускающем слое 22 при воздействии стоячей световой волны, а блок 8 обработки данных дополнительно содержит спектроанализатор 14. При этом устройство видения объектов с помощью лазерной подсветки дополнительно снабжено светоделительным элементом 23, расположенным между тонким частично пропускающим слоем 22 и приемным объективом 5, и вторым лазером 24 с частотой υ2 светового излучения, определяемой из выражения υ2 = υ1±F, где F - частота биений, которую задают в диапазоне 0-6•1012 Гц, оптически сопряженным со светоделительным элементом 23.
При этом устройство видения объектов с помощью лазерной подсветки дополнительно снабжено экраном 15, ограничивающим размер b входных окон 16 фотоэлементов 7, установленным на матрице 7 приборов с зарядовой связью, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 7 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p (фиг. 5). Устройство лазерного видения снабжено блоком 17 управления.
Тонкий частично пропускающий слой 22 может быть нанесен на одну из поверхностей оптического клина 19. Отражающее зеркало 10 при этом может быть выполнено на другой поверхности оптического клина 19 в виде отражающего покрытия с коэффициентом отражения 0,50-0,99 и коэффициентом пропускания 0,01-0,50. При использовании оптического клина 19 угол ϕ между плоскостью тонкого частично пропускающего слоя 22 и плоскостью отражающего зеркала 10 задан из соотношения sinϕ = λ/2dn, где λ- длина световой волны; d - период системы 13 интерференционных полос, n - показатель преломления материала оптического клина 19.
Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Заявленный способ лазерного видения осуществляется на настоящем устройстве следующим образом.
Через блок 17 управления включается первый лазер 2 и осуществляется подсветка объекта когерентным световым излучением с формированием изображения объекта по отраженному от него упомянутому лазерному излучению посредством приемного объектива 5. Сформированный световой поток поступает на отражающее зеркало 10, отражается от него и в виде стоячей световой волны поступает на тонкий частично пропускающий слой 22. За счет того, что тонкий частично пропускающий слой 22 рассеивает или поглощает энергию электрического поля стоячей световой волны и расположен наклонно, в нем образуется система 13 интерференционных полос.
Одновременно с включением первого лазера 2 через блок 17 управления включается второй лазер 24 и на тонкий частично пропускающий слой 22 осуществляется дополнительное воздействие стоячей световой волной от второго лазера 24 путем направления светового излучения от второго лазера 24 на тонкий частично пропускающий слой 22 и отражающее зеркало 10 и в нем образуется система 13 интерференционных полос практически с тем же периодом следования d, так как частота υ2 светового излучения второго когерентного источника 24 отличается от частоты υ1 светового излучения первого когерентного источника 2 на частоту биений F, которую задают в диапазоне 0-6•1012 Гц. Так как второй когерентный источник 24 используется в качестве гетеродина, то кроме образования системы 13 интерференционных полос на тонком частично пропускающем слое 22 на этом же слое 22, как на смесителе, возникают световые биения с частотой 0-6•1012 Гц (с частотой радиодиапазона). При этом регистрацию системы 13 интерференционных полос стоячей световой волны с периодом d осуществляют за счет того, что полученные с фотоэлементов 7 электрические сигналы подвергают преобразованию по пространственной координате и координате времени, а затем получают изображение объекта на мониторе. При частоте биений F=0-6•1012 Гц осуществляется выделение и маркирование изображений движущихся объектов на фоне изображения неподвижных объектов за счет регистрации световых биений по полю изображений подвижных и неподвижных объектов на частотах радиодиапазона.
За счет того, что приемный канал 1 дополнительно снабжен экраном 15, установленным на матрице 6 приборов с зарядовой связью со стороны отражающего зеркала 10 и задающим размер b входных окон 16 фотоэлементов 7 не больше половины периода p, а каждая матричная группа 18 выполнена в виде двух параллельных рядов фотоэлементов 7 со сдвигом фотоэлементов 7 одного ряда по отношению к другому на половину периода p, полученные с фотоэлементов 7 электрические сигналы регистрируют в виде их зависимости от местоположения фотоэлементов 7 в группе 18 матрицы 6 приборов с зарядовой связью поочередно из каждого упомянутого ряда. Записанные электрические сигналы подвергаются двухмерному преобразованию Фурье (по одной пространственной координате и координате времени) на спектроанализаторе 14, на выходе которого получают их частотное преобразование. При этом достигается хорошее разрешение длин волн отраженного когерентного светового излучения на каждой матричной группе 18. Это позволяет выделять сигнал с каждой группы 18 определенной пространственной частоты и получать из этих сигналов изображение объекта на мониторе 9. При этом световое излучение, рассеянное на крупных неоднородностях, содержащихся, например, в мутной воде, и являющееся некогерентной фоновой засветкой, в виде сигнала пространственной частоты не выделяется. Для получения каждого последующего кадра изображения объекта на мониторе 9 регистрацию электрических сигналов с групп 18 матрицы 6 приборов с зарядовой связью осуществляют при их выделении на участках матрицы 6 приборов с зарядовой связью, сдвинутых относительно местоположения фотоэлементов 7 или рядов в группах 18, выделенных для получения изображения объекта на мониторе 9 в предыдущем кадре изображения, как показано на фиг.5,а и б.
Регистрацию, анализ и получение изображения объекта на мониторе 9 осуществляют в соответствии со схемой стробирования для каждого окна дальностей, включающем окно дальности, на которой расположен объект.
Предлагаемые способы видения объектов с помощью лазерной подсветки и устройства для их осуществления позволяют повысить эффективность обнаружения объектов в среде, рассеяние когерентного светового излучения в которой происходит на крупных неоднородностях, например, в мутной воде, задымленной или запыленной атмосфере, тумане, а также обеспечивают выделение и маркирование изображений движущихся объектов и измерение скорости их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИДЕНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ ЛАЗЕРНОЙ ПОДСВЕТКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2205426C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА | 2002 |
|
RU2212670C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ОПТИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2195693C1 |
| СПОСОБ АКУСТИЧЕСКИХ ИЗМЕРЕНИЙ И МИКРОФОН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2225599C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ОПТИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2208823C1 |
| СПОСОБ СПЕКТРОМЕТРИИ И ИНТЕРФЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2207527C1 |
| СПОСОБ СПЕКТРОМЕТРИИ И ИНТЕРФЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2189017C1 |
| СПОСОБ СПЕКТРОМЕТРИИ И ИНТЕРФЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2207526C1 |
| СПОСОБ СПЕКТРОМЕТРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2190197C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ОПТИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2202117C1 |
Изобретения относятся к системам видения удаленных объектов. Отличительной особенностью предлагаемых способов является то, что фотоэлементы матрицы приборов с зарядовой связью разделяют на группы, на которые проецируют систему интерференционных полос стоячей световой волны путем размещения между приемным объективом и выделенными группами фотоэлементов отражающего зеркала, частично пропускающего световое излучение, и тонкого частично пропускающего слоя или периодической структуры, образованной тонкослойными элементами, регистрацию системы интерференционных полос в каждой группе фотоэлементов осуществляют в виде сигналов пространственной частоты, затем получают изображение объекта на мониторе. Заявленные способы лазерного видения осуществляют на устройствах, включающих передающий канал, содержащий лазер и оптическую систему формирования лазерного пучка, приемный канал, содержащий оптически сопряженные приемный объектив, матрицу приборов с зарядовой связью, тонкий частично пропускающий слой или периодическую структуру, образованную тонкослойными элементами, отражающее зеркало, выполненное частично пропускающим световое излучение, блок обработки данных, спектроанализатор и монитор. Одно из предлагаемых устройств снабжено дополнительным лазером. Технический результат - повышение эффективности обнаружения подвижных объектов в рассеивающей среде. 8 с. и 6 з.п. ф-лы, 6 ил.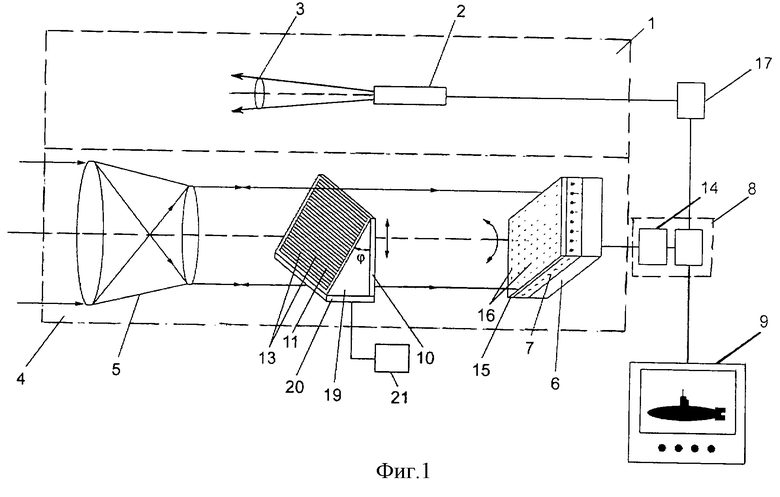
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| КАРАСИК В.Е., ОРЛОВ В.М | |||
| Лазерные системы видения | |||
| - М., 2001, с.318-323 | |||
| US 6225621 В1, 01.05.2001 | |||
| US 5969676, 19.10.1999 | |||
| US 5142559, 25.08.1992 | |||
| СПОСОБ РАЗРАБОТКИ ЗАЛЕЖЕЙ НЕФТИ В ГИДРОФИЛЬНЫХ ПОРОДАХ-КОЛЛЕКТОРАХ | 2005 |
|
RU2301883C1 |
| Запоминающее устройство | 1971 |
|
SU468302A1 |
| US 6054701, 25.04.2000. | |||

