Изобретение относится к механическим устройствам, применяющимся в электроаппаратостроении для управления коммутационными аппаратами. Такой привод обеспечивает выполнение операций включения ("В"), отключения ("О"), заземления ("З") и разземления ("РЗ").
Известны приводы, в которых для выполнения силовых операций включения или отключения коммутационных аппаратов применяются пружины. В таких приводах пружины используются либо только для выполнения операции "О" (электромагнитные приводы, пневматические приводы с включением сжатым воздухом), либо применяются две пружины - одна для включения и другая - для отключения. В последнем случае пружина включения взводится с помощью специального устройства и при операции включения обеспечивает включение аппарата с одновременным взведением отключающей пружины [1]. Однако приводы такого типа не могут обеспечить выполнение операций "З" и, следовательно, также - "РЗ".
Для аппаратов небольшой мощности, например выключателей нагрузки, известно применение одной и той же пружины как для операции "В", так и для операции "О" [2] . При этом пружина может взводиться вручную. Но такие приводы тоже не предназначены для осуществления операций "З" и "РЗ".
В случае необходимости, по условиям работы коммутационного аппарата в системе энергоснабжения, когда в отключенном положении аппарата требуется заземлить один из его выводов, используют дополнительно заземлитель со своим приводом. Для повышения экономических характеристик схемы энергоснабжения применяют вместо двух коммутационных аппаратов один - комбинированный, выполняющий операции "В", "О", "З" и "РЗ" с помощью одного трехпозиционного привода, имеющего одну рабочую пружину.
Наиболее близким к предлагаемому приводу является привод, заявленный в Патентное ведомство Франции [3]. В этом приводе пружина обеспечивает быстрое включение и отключение аппарата, а также быстрое заземление и разземление его. Однако в приводе оси основного вала, соединенного с рабочим валом аппарата, вала управления включением и отключением и вала, с помощью которого выполняется заземление и разземление, связанные между собой рычагами, пространственно разнесены, что делает привод относительно габаритным, состоящим из значительного числа комплектующих деталей и, соответственно, более трудоемким в изготовлении и сборке. Кроме того, для аппаратов с приводами такого типа операция разземления не требует высокоскоростного действия. Целью изобретения является создание более компактной конструкции привода, уменьшение его габаритов и, следовательно, стоимости, увеличение надежности и механической стойкости, а также повышение безопасности в эксплуатации.
Указанная цель достигается тем, что в пружинном приводе для управления коммутационным аппаратом имеются основной вал и два вала управления, связанные между собой рычагами и пружиной. Новым является то, что валы управления расположены один в другом соосно с блокировочным элементом между ними, при этом рычаги, расположенные на одном из валов управления, выполнены в виде дисков с прорезями для размещения одного из опорных концов пружины, а другой конец пружины связан с диском другого вала управления, кроме того, на основном валу и одном из валов управления расположены шестерни, находящиеся в зацеплении между собой.
Предлагаемая конструкция привода представлена на фиг.1-4. На фиг.1 - компоновочный чертеж привода, на фиг.2-4 - схемы работы привода.
В состав предлагаемого привода входят (фиг.1):
- две плиты 1 и 2 и связывающие их стяжки 3, которые образуют корпус привода;
- диск-рычаг 4 и диск 5, оба жестко связаны с валом управления 6;
- свободно вращающиеся на валу 6 диск 7 и соединенная с ним шестерня Z1, диск 7 и шестерня Z1 имеют относительно друг друга возможность перемещения на 13o;
- диск-рычаг 8, жестко закрепленный на валу управления 9;
- диск 10 и скрепленная с ним шестерня Z2, которые жестко установлены на основном валу 11, связанном с валом коммутационного аппарата;
- пружина 12, имеющая на концах цапфы с осями 13 и 14;
- штифт 15 с пружиной 16.
Валы 6 и 9 - соосны, последний, например, входит в первый. Диск-рычаг 4 и диск 5 имеют концентрические с их центральной осью прорези, в которые входит ось 14 цапфы пружины 12. Кроме того, на внешней образующей поверхности диска-рычага 4 предусмотрены углубления под фиксатор 17, закрепленный на плите 2 корпуса привода, а в диске 5 - дополнительная концентрично его оси прорезь для пальца 18 диска 8.
На диске-рычаге 8 закреплены ось 13 цапфы пружины 12 и палец 18, а на его внешней образующей поверхности предусмотрено углубление под фиксатор 19, закрепленный на плите 1 корпуса привода.
Диск 10 выполнен со скосом, рабочая поверхность которого взаимодействует с пальцем 18 диска-рычага 8. На внешней образующей поверхности диск 10 снабжен зубчатыми элементами для зацепления с защелками 20 и 21, которые на рабочих концах имеют ролики, а на их свободные концы воздействуют пружины (не показаны на чертежах), прижимающие защелки к образующей поверхности диска 10.
Диск 7 имеет концентрично его оси прорезь, в которой находится ось 14 цапфы пружины 12, и два пальца 22 и 23.
Шестерни Z1 и Z2 находятся в зацеплении с передаточным отношением, например Z1:Z2=1:2.
Для управления приводом вручную на торцевых частях валов 6 и 9 предусмотрены зацепы, с которыми сочленяется рукоятка при осуществлении операций приводом, причем зацепы валов 6 и 9 различны и для управления ими требуются либо разные рукоятки, либо одна рукоятка с разными концевыми частями для сочленения с каждым из валов.
На торцевой части вала 9 находится в гнезде подпружиненный штифт 15. Во включенном положении коммутационного аппарата штифт 15 под действием пружины 16 находится в пазу 24 вала 6 и, таким образом, не позволяет вставить рукоятку для выполнения операции заземления.
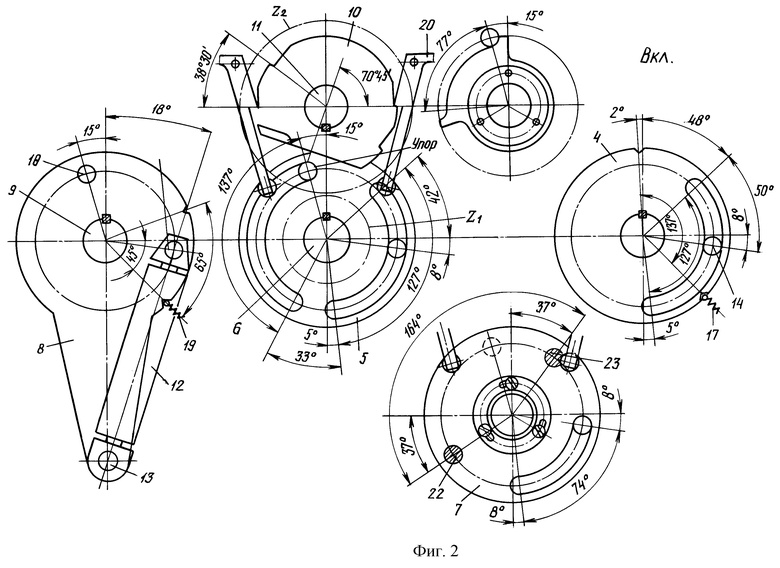
Работа привода
1. Операция отключения - начальное положение механизма привода на фиг.2, включенное положение аппарата. С помощью рукоятки вал управления 6 поворачивается по часовой стрелке (рассматривается пример с полным углом поворота 137o), при этом на этот же угол поворачиваются диски 4 и 5, преодолевая усилие от фиксатора 17. Диск-рычаг 4 имеющейся в нем прорезью захватывает ось 14 цапфы пружины 12 и переводит ее из положения "В" через "мертвую точку". Пружина 12 со скоростью перебрасывается в положение "О", захватывая осью 14 диск 7 с помощью имеющейся в нем прорези. Диск 7 с сообщенной ему пружиной 12 скоростью поворачивается по часовой стрелке и через зубчатую передачу Z1/Z2 сообщает диску 10 и основному валу 11 движение против часовой стрелки, перед этим защелка 20 снимается с зацепления с диском 10 пальцем 23 диска 7 благодаря смещению его по отношению шестерни Z1 на 13o. В результате коммутационный аппарат, вал которого сочленен с валом 11, переводится в положение "О" - фиг.3. В процессе операции отключения ось 14 проходит секторный путь с углом 164o, диск 7 поворачивается на угол 90o, шестерня Z1 - на 77o и диск 10 - на угол 38,5o. Штифт 15 выводится из паза 24 вала 6 (фиг.1). Диск-рычаг 8, удерживаемый фиксатором 19, остается в исходном положении.
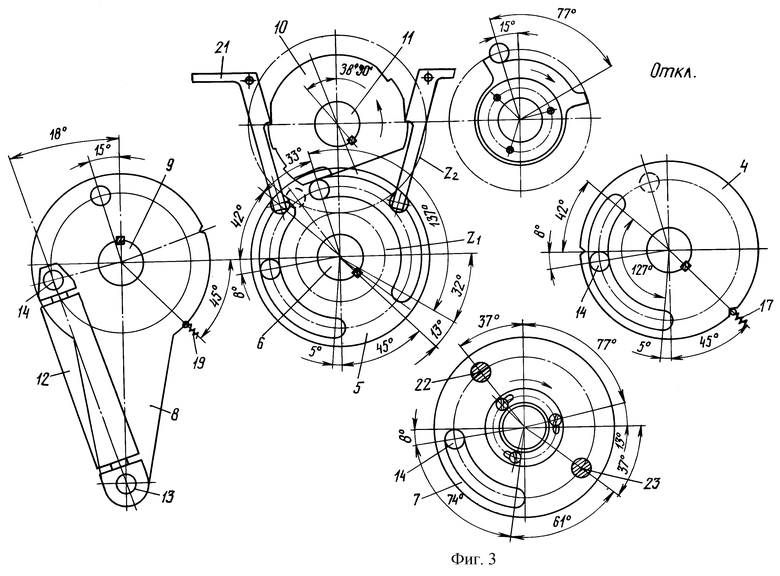
2. Операция включения - исходное положение механизма привода на фиг.3. С помощью рукоятки вал 6 поворачивается против часовой стрелки (как ранее принято, например, на полный угол поворота 137o)? и одновременно, преодолевая усилие от фиксатора 17, повернутся на тот же угол диски 4 и 5. Диск-рычаг 4 имеющейся в нем прорезью захватывает ось 14 цапфы пружины 12 и переводит ее из положения "О" через "мертвую точку". Пружина 12 со скоростью перебрасывается в положение "В", захватывая осью 14 диск 7 с помощью имеющейся в нем прорези. Диск 7 с сообщенной ему пружиной 12 скоростью поворачивается против часовой стрелки и через зубчатую передачу Z1/Z2 сообщает диску 10 и валу 11 вращательное движение по часовой стрелке, перед этим защелка 21 снимается с зацепления с диском 10 пальцем 22 диска 7 благодаря смещению его по отношению шестерни Z1 на 13o. В результате коммутационный аппарат, вал которого сочленен с валом 11, переводится в положение "В" фиг.2. В процессе операции включения ось 14 проходит секторный путь против часовой стрелки с углом 164o, диск 7 повернется на угол 90o, шестерня Z1 - на угол 77o и диск 10 - на угол 38,5o. Штифт 15 под действием пружины 16 введен в паз 24 вала 6. Диск-рычаг 8, удерживаемый фиксатором 19, остается в прежнем положении.
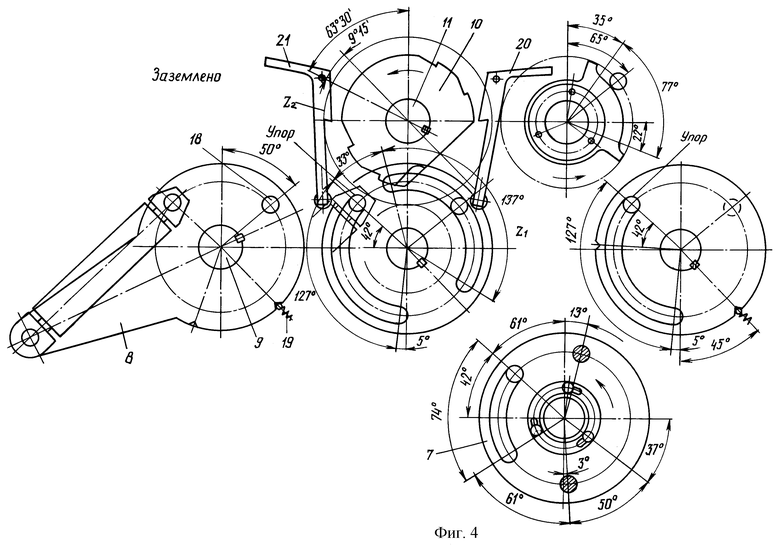
3. Операция заземления - исходное положение механизма привода, соответствующее положению коммутационного аппарата "О", на фиг.3. С помощью рукоятки вал 9 поворачивается с диском-рычагом 8 по часовой стрелке (в данном примере угол поворота 65o), преодолевая усилие фиксатора 19. При этом цапфа с осью 13 подводит пружину к положению, близкому к "мертвому", и пальцем 18 рычаг 8 откидывает защелку 20 от зацепления с диском 10. Под действием пружины 12, действующей через ось 14, диск 7 поворачивается со скоростью, сообщенной пружиной 12, по часовой стрелке на 50o и через передачу Z1/Z2 приводит в действие диск 10 с валом 11, которые поворачиваются против часовой стрелки на 25o. Вал 11 сочленен с валом коммутационного аппарата и, таким образом, вал аппарата также повернется по часовой стрелке на 25o - операция заземления завершена (фиг.4).
4. Операция разземления - исходное положение механизма привода на фиг.4. С помощью рукоятки вал 9 с диском-рычагом 8 поворачивается против часовой стрелки (как ранее принято, угол поворота 65o), преодолевая усилие фиксатора 19. При этом палец 18 диска-рычага 8 воздействует на рабочую поверхность скоса диска 10 и поворачивает его и вал 11, сочлененный с валом коммутационного аппарата, на 25o по часовой стрелке до положения аппарата "О" и установки диска 10 на защелки 20 и 21. Шестерня Z2 в зацеплении с шестерней Z1 приводит в действие диск 7 и поворачивает его против часовой стрелки на 50o. Операция разземления завершена, коммутационный аппарат и привод приведены в положение "О" - фиг.3.
В отличие от запатентованного привода [3], в предлагаемой конструкции, во-первых, валы сконцентрированы на двух осях вместо трех. По одной оси расположен выходной вал привода, связанный с валом управляемого аппарата, а по второй оси - концентрично два вала управления, с помощью которых выполняются операции "В" и "О" одним валом и "З" и "РЗ" - другим, что создает более компактную и экономичную конструкцию привода. Во-вторых, выполнение операции "РЗ" предлагаемым приводом осуществляется без использования рабочей пружины, что позволяет увеличить износостойкость и срок службы привода и управляемого им коммутационного аппарата. В-третьих, расположение на одной оси двух концентричных один в другом разных размеров валов управления требует применения и разных конструкций рукояток, что уменьшает возможность проведения ошибочных операций обслуживающим персоналом, поскольку между валами предусмотрен блокировочный штифт, исключающий возможность неправильного использования рукоятей ручного управления приводом.
Источники информации
1. Eggert H., Grieger G., Kopplin H., Lipken H. Operating technology for SF6 puffer-breakers. Development, production and service experience. Report 13-05, 1986, Session CIGRE.
2. Выключатель нагрузки автогазовый типа ВНП-М1-10/630. Техническое описание и инструкция по эксплуатации ИБЦЖ674212.001 ТО. Нальчик. 1994.
3. Заявка Франции 2660109, "Привод трехпозиционного переключателя". Заявлена 23.03.1990 г. , опубликована 27.05.1991 г., Н 01 Н 9/26, Н 01 Н 33/52 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРУЖИННЫЙ ПРИВОД КОММУТАЦИОННОГО АППАРАТА | 1995 |
|
RU2089958C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ВЫКЛЮЧАТЕЛЕЙ ВЫСОКОГО НАПРЯЖЕНИЯ НА ВКЛЮЧАЮЩУЮ СПОСОБНОСТЬ | 2006 |
|
RU2306574C1 |
| ГАЗОВЫЙ ВЫКЛЮЧАТЕЛЬ | 1999 |
|
RU2150764C1 |
| КОНТАКТНАЯ СИСТЕМА ВАКУУМНОЙ ДУГОГАСИТЕЛЬНОЙ КАМЕРЫ (ВАРИАНТЫ) | 2000 |
|
RU2178927C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2329514C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДИСТАНЦИОННОЙ ПРОВОДНОЙ СВЯЗИ | 2002 |
|
RU2218640C1 |
| СПОСОБ ИСПЫТАНИЙ ВАКУУМНЫХ ВЫКЛЮЧАТЕЛЕЙ НА СТОЙКОСТЬ ПРИ СКВОЗНЫХ ТОКАХ КОРОТКОГО ЗАМЫКАНИЯ | 2004 |
|
RU2269140C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| СВЕРХВЫСОКОЧАСТОТНЫЙ ВОЗБУДИТЕЛЬ БЕЗЭЛЕКТРОДНОЙ ГАЗОРАЗРЯДНОЙ ЛАМПЫ | 1999 |
|
RU2161844C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2001 |
|
RU2205342C2 |
Изобретение относится к механическим устройствам, применяющимся в электроаппаратостроении для управления коммутационными аппаратами. Техническим результатом является создание более компактной конструкции привода, уменьшение его габаритов, а также увеличение надежности и механической стойкости, повышение безопасности в эксплуатации. В пружинном приводе для управления трехпозиционным коммутационным аппаратом, содержащим основной вал, два вала управления, связанные между собой рычагами и пружиной, указанные валы управления расположены один в другом соосно с блокировочным элементом между ними. При этом рычаги, расположенные на одном из валов управления, выполнены в виде дисков с прорезями для размещения одного из опорных концов пружины, а другой конец пружины связан с диском другого вала управления. На основном валу и одном из валов управления расположены шестерни, находящиеся в зацеплении между собой. 4 ил.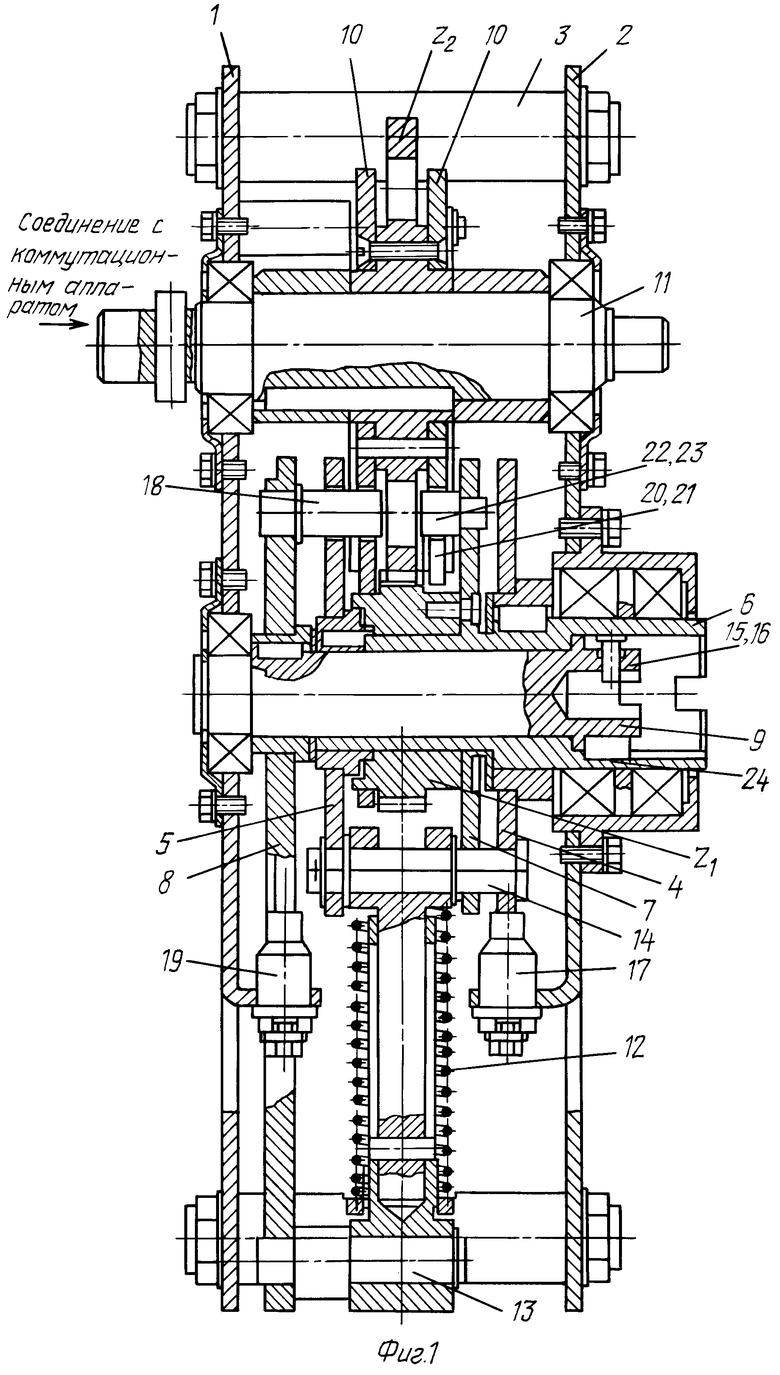
Пружинный привод для управления трехпозиционным коммутационным аппаратом, содержащий основной вал, два вала управления, связанные между собой рычагами и пружиной, отличающийся тем, что валы управления расположены один в другом соосно с блокировочным элементом между ними, при этом рычаги, расположенные на одном из валов управления, выполнены в виде дисков с прорезями для размещения одного из опорных концов пружины, а другой конец пружины связан с диском другого вала управления, кроме того, на основном валу и одном из валов управления расположены шестерни, находящиеся в зацеплении между собой.
| ЦЕНТРАЛЬНЫЙ ВЕРХНИЙ СТОП-СИГНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2660109C2 |
| ПРИВОД ВЫКЛЮЧАТЕЛЯ НАГРУЗКИ | 1997 |
|
RU2134464C1 |
| ПРИВОДНОЙ МЕХАНИЗМ ВЫКЛЮЧАТЕЛЯ | 1996 |
|
RU2128379C1 |
| US 3474201 А, 07.04.1971 | |||
| US 3835277 А, 10.09.1974 | |||
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1972 |
|
SU430007A1 |

