Настоящее изобретение относится к трехосному лазерному прецессионному гироскопу, симметричному относительно его катодной и приводной осей, и, в частности, к лазерному прецессионному гироскопу с моноблочной оптической системой, состоящей из изготовленного, например, из кварца или церодура (Zerodur) оптического блока с тремя сообщающимися друг с другом резонансными оптическими камерами (по одной на каждую ось), выполненного, например, по типу гироскопа, описанного в патенте FR 8006298 от 21 марта 1980 г., который выдан на имя  Francaise d'Equipments pour la Navigation
Francaise d'Equipments pour la Navigation  (S.F. E. N.A.) и права по которому были переданы Sextant Avionique. В предложенном в этом патенте гироскопе имеются три камеры, которые вместе образуют правильный восьмигранник с восемью треугольными гранями, при этом камеры, где каждая имеет квадратную форму, расположены в трех ортогональных плоскостях (соответственно, перпендикулярных трем осям чувствительности). Эти камеры выполнены таким образом, что каждый из углов одной из камер совпадает и сообщается с углом другой камеры. С каждой парой совпадающих углов связано зеркало, ориентированное таким образом, что его можно использовать с двумя камерами этой пары. В каждой камере одно из таких зеркал, называемое считывающим зеркалом, связано со смешивающей призмой, которая, интерферируя соответствующие лучи, позволяет определить движения гироскопа, а следовательно, и летательного аппарата, на котором он установлен. Другое зеркало, называемое зеркалом управления, установленное соответствующим образом на опоре преобразователя, позволяет регулировать длину камеры с целью получения максимальной выходной мощности. Каждая камера, которая заполнена находящимся в ней под низким давлением газом, имеет по крайней мере один катод и два соответствующим образом расположенных анода, которые возбуждают электроны атомов газа и создают внутри камеры два встречных луча лазерного излучения, которые распространяются в противоположных направлениях вдоль оптического пути. Для компенсации разницы частот между двумя встречными волнами в камере с помощью катода создаются два симметричных разряда, причем корпус этого катода через два капилляра сообщается с двумя противоположными участками камеры, в которых создаются эти два разряда.
(S.F. E. N.A.) и права по которому были переданы Sextant Avionique. В предложенном в этом патенте гироскопе имеются три камеры, которые вместе образуют правильный восьмигранник с восемью треугольными гранями, при этом камеры, где каждая имеет квадратную форму, расположены в трех ортогональных плоскостях (соответственно, перпендикулярных трем осям чувствительности). Эти камеры выполнены таким образом, что каждый из углов одной из камер совпадает и сообщается с углом другой камеры. С каждой парой совпадающих углов связано зеркало, ориентированное таким образом, что его можно использовать с двумя камерами этой пары. В каждой камере одно из таких зеркал, называемое считывающим зеркалом, связано со смешивающей призмой, которая, интерферируя соответствующие лучи, позволяет определить движения гироскопа, а следовательно, и летательного аппарата, на котором он установлен. Другое зеркало, называемое зеркалом управления, установленное соответствующим образом на опоре преобразователя, позволяет регулировать длину камеры с целью получения максимальной выходной мощности. Каждая камера, которая заполнена находящимся в ней под низким давлением газом, имеет по крайней мере один катод и два соответствующим образом расположенных анода, которые возбуждают электроны атомов газа и создают внутри камеры два встречных луча лазерного излучения, которые распространяются в противоположных направлениях вдоль оптического пути. Для компенсации разницы частот между двумя встречными волнами в камере с помощью катода создаются два симметричных разряда, причем корпус этого катода через два капилляра сообщается с двумя противоположными участками камеры, в которых создаются эти два разряда.
Фактически в трехосном прецессионном гироскопе указанного выше типа используется один катод, который связан с тремя камерами тремя катодными капиллярами.
Такой катод представляет собой концентрированный источник тепла, который расположен на одной стороне оптического блока и создает в блоке температурный перепад, который вносит возмущения в потоки находящегося в камерах газа. Связанной с этой проблемой является и проблема, заключающаяся в образовании разницы давлений на концах создаваемого в камере разряда, в частности разницы давлений в месте расположения анода и газа, который находится в корпусе катода.
Одно из возможных решений этих проблем было предложено в заявке FR 9501645, поданной 10 февраля 1995 г. на имя Sextant Avioniqui, в которой для компенсации асимметрии, создаваемой в оптическом блоке катодной камерой, предлагалось использовать уравновешивающую камеру, сообщающуюся с камерой прецессионного гироскопа и выполненную в оптическом блоке на его противоположной по отношению к катодной камере стороне. Эту уравновешивающую камеру целесообразно располагать относительно плоскости, оси или центра симметрии блока симметрично по отношению к катодной камере.
Задачей настоящего изобретения является улучшение характеристики именно такого типа прецессионного гироскопа.
Поставленная задача решается с помощью предложенного трехосного лазерного прецессионного гироскопа, выполненного по типу гироскопа, который имеет оптический блок, в котором имеются три сообщающиеся резонансные оптические камеры, которые образуют правильный восьмигранник с восемью треугольными гранями, причем каждая из камер имеет четыре капиллярных сегмента, образующих квадрат, который лежит в плоскости, перпендикулярной соответствующей оси измерений, и эти камеры выполнены таким образом, что каждый из углов одной камеры совпадает и сообщается с углом другой камеры, а также имеются зеркала, которые связаны с каждой парой совпадающих углов камер и ориентированы таким образом, что их можно использовать для работы с обеими образующими пару камерами, при этом каждая из камер связана с четырьмя зеркалами, в частности со считывающими зеркалами и с зеркалами управления, используемыми для изменения длины камеры, и соединена с катодной камерой двумя из катодных капилляров, проходящими к двум из расположенных одно за другим зеркал, и с уравновешивающей камерой двумя из уравновешивающих капилляров, проходящими к двум из других зеркал, причем такой гироскоп имеет также приводной механизм, который приводит оптический блок во вращение с переменной скоростью вокруг приводной оси. Согласно изобретению элементы различных категорий, которыми оборудован оптический блок, в частности зеркала управления, считывающие зеркала, катодные капилляры, уравновешивающие капилляры и аноды, расположены в оптическом блоке и вокруг него таким образом, чтобы была обеспечена симметрия вращения третьего порядка вокруг общей для всех этих элементов оси вращения, которая совпадает с приводной осью.
В предпочтительном варианте выполнения изобретения оси катодной камеры и уравновешивающей камеры, из которых выходят соответственно три катодных капилляра и три уравновешивающих капилляра, расположены на оси вращения, которая перпендикулярна и проходит через центры двух противоположных треугольных граней восьмигранника, образованного тремя зеркалами управления камерами и тремя считывающими зеркалами.
При этом также предпочтительно, что каждая камера имеет пару анодов, которые расположены в плоскости камеры и образуют в камере две зоны активного разряда, которые расположены симметрично по отношению к оси симметрии, которая не совпадает с осью вращения.
В предпочтительном варианте изобретения три капиллярных сегмента, которые образуют одну из граней, имеют расположенную в их центральной зоне диафрагму, при этом все три диафрагмы расположены симметрично с симметрией вращения третьего порядка вокруг оси вращения.
В соответствии с изобретением приводной механизм гироскопа содержит по крайней мере одно колесо, состоящее из двух коаксиальных колец, соединенных друг с другом несколькими радиальными пластинами, включающими приводной элемент, при этом крепление оптического блока к центральному кольцу осуществляется с помощью крепежных клиньев, которые приклеены к блоку и расположены симметрично с симметрией вращения третьего порядка вокруг оси вращения.
Предпочтительно клинья расположить попарно и приклеить к центральным участкам скошенных кромок, ограничивающих по периметру одну из граней восьмигранника.
Предпочтительно также ось вращения оптического блока расположить вертикально.
Таким образом, в настоящем изобретении предлагается, с одной стороны, все относящиеся к различным категориям элементы трехосного лазерного прецессионного гироскопа с оптическим блоком, имеющим коаксиальные катодную камеру и уравновешивающую камеру, такие как зеркала управления, считывающие зеркала, активные капилляры, пассивные капилляры, аноды, распределить в оптическом блоке и вокруг него таким образом, чтобы обеспечить в каждой категории элементов симметрию вращения третьего порядка вокруг оси, являющейся общей осью катодной камеры и уравновешивающей камеры и совпадающей с трисектрисой куба, в который вписан оптический блок и в центрах граней которого расположены зеркала, причем положение элементов каждой категории совпадает с положением других элементов этой же категории после их поворота на 120o вокруг оси вращения, и, с другой стороны, использовать упомянутую выше ось вращения в качестве приводной оси гироскопа.
Такое расположение элементов, при котором центр тяжести и центр инерции оптического блока лежат на его приводной оси, облегчает сборку оптического блока и ограничивает его движения по конической траектории.
Ниже изобретение более подробно поясняется описанием не ограничивающего его объем защиты примера его выполнения со ссылкой на прилагаемые чертежи, которые показывают:
на фиг.1 - схематичное изображение в аксонометрии камер предлагаемого в изобретении трехосного моноблочного лазерного прецессионного гироскопа с шестью зеркалами,
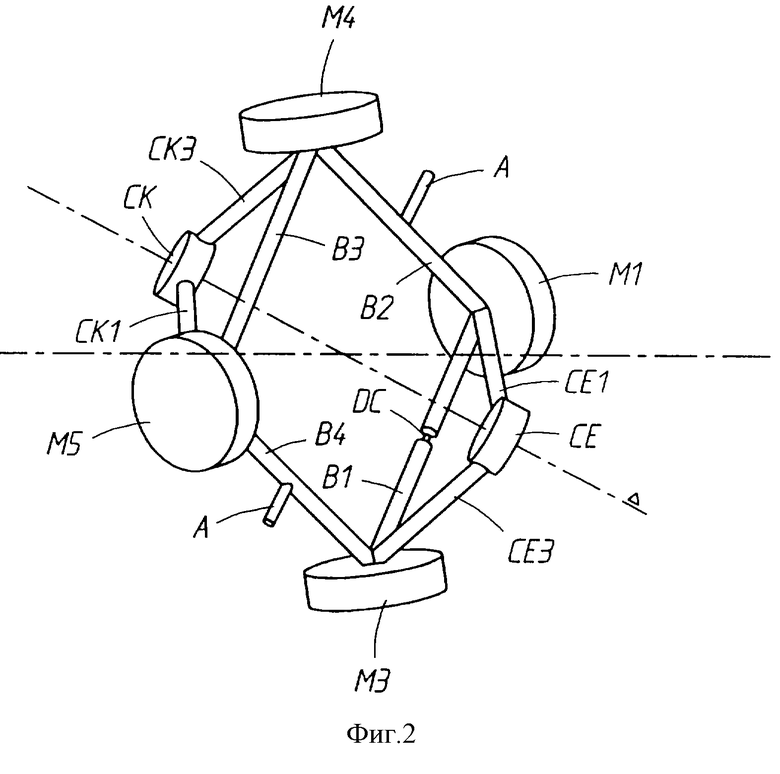
на фиг. 2 - одну из камер прецессионного гироскопа по фиг.1, которая соединена с катодом и уравновешивающей камерой, а также с двумя своими анодами, и
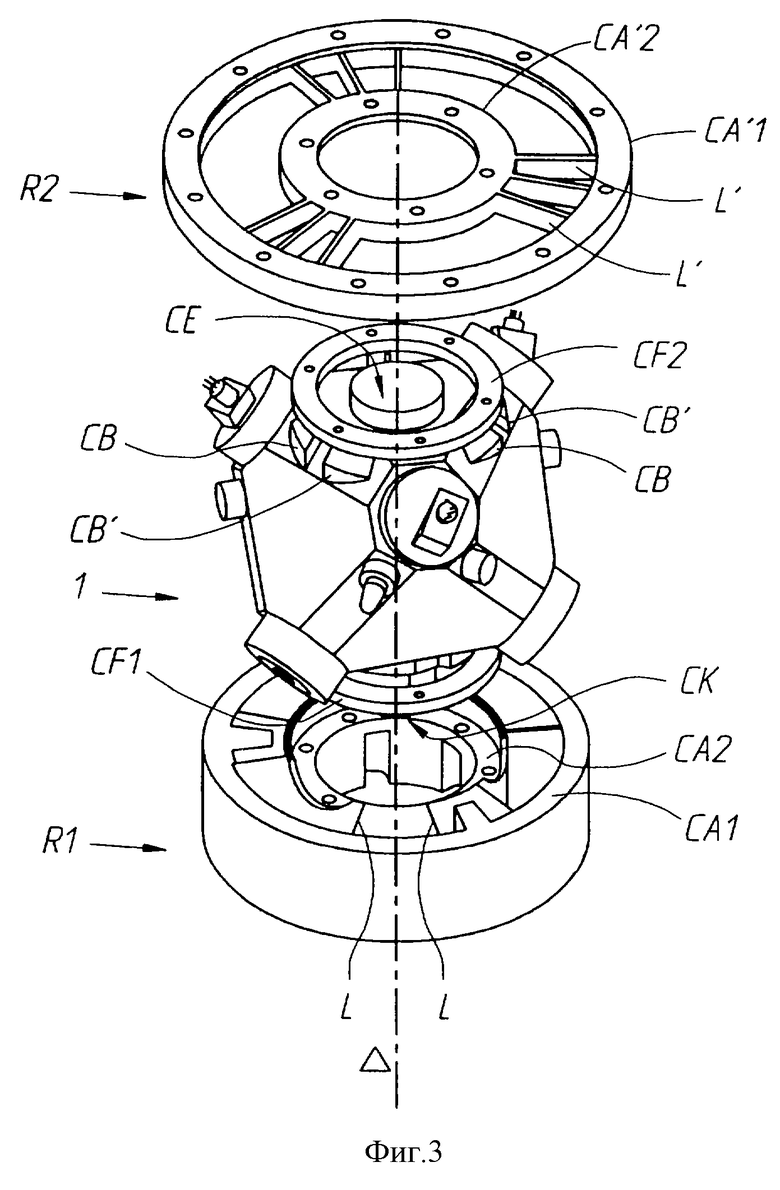
на фиг. 3 - изображение в аксонометрии оптического блока прецессионного гироскопа вместе с соединенным с ним приводным механизмом.
В рассматриваемом примере прецессионный гироскоп имеет оптический блок 1 восьмигранной формы со скошенными краями граней (фиг.3), внутри которого в трех ортогональных плоскостях расположены три камеры В, С, D, состоящие из капиллярных сегментов В1-В4, С1-С4 и D1-D4, каждая из которых образует оптический путь квадратной формы.
Эти камеры В, С, D выполнены таким образом, что каждый из углов одной из камер совпадает и сообщается с углом другой камеры. Камеры образуют внутри блока правильный восьмигранник, который имеет восемь треугольных граней, параллельных граням блока, и шесть вершин, в которых расположены шесть соответствующих зеркал М1, М2, М3, М4, М5, М6, которые соответственно лежат в плоскостях граней куба, в который вписан восьмигранник. В рассматриваемом примере зеркала М1, М2, М3 являются считывающими зеркалами, а зеркала М1, M2, M3 являются зеркалами управления и, будучи связанными с пьезоэлектрическими преобразователями, используются для регулирования длины камер.
Для образования внутри трех камер В, С, D гироскопа соответствующих пар распространяющихся навстречу друг другу лучей используются катод К и шесть анодов А.
Катод К расположен внутри катодной камеры СК, ось Δ которой перпендикулярна катодной грани F1 восьмигранника, образованной капиллярными сегментами B3, С3, D3, и проходит через центр этой грани F1. Эта камера СК расположена вне восьмигранника, образованного камерами В, С, D, и сообщается с камерами тремя соответствующими капиллярами СК1, СК2, СК3 в местах расположения трех зеркал М4, М5, М6 управления, которые образуют грань F1. Эти три катодных капилляра расположены симметрично с симметрией вращения третьего порядка относительно оси Δ (т.е. так, что положение одного из них совпадает с положением другого после его поворота на 120o вокруг оси Δ), которая, как видно на чертеже, представляет собой трисектрису куба, в который вписан оптический блок 1 восьмигранной формы и в центре граней которого расположены зеркала.
Эти три капилляра СК1, CK2, СК3 (или катодные выходы) используются для ионизации активных капилляров на участке между катодом К и анодом А.
Шесть анодов А, из которых на фиг.2 показаны только два, расположены таким образом, что в каждой камере образуются две зоны разряда ("активные зоны"), расположенные симметрично относительно оси симметрии, не совпадающей с осью симметрии Δ. Каждая пара анодов А лежит в плоскости соответствующей камеры В, С, D. Для настройки камер В, С, D используются три пары анодов, которые распределены внутри оптического блока симметрично с симметрией вращения третьего порядка относительно оси Δ, при этом положение каждой пары анодов совпадает с положением другой пары анодов после ее поворота на 120o вокруг оси Δ.
Для теплового и термодинамического уравновешивания блока используется цилиндрическая уравновешивающая камера СЕ, выполненная по существу аналогично расположенной с ней на одной оси катодной камере СК и расположенная вне восьмигранника перед гранью F2, противоположной грани F1 (обе эти грани перпендикулярны оси Δ). Грань F2 образована тремя капиллярными сегментами В1, С1, D1, в центре каждого из которых расположена диафрагма DC. Все три диафрагмы DC расположены симметрично с симметрией вращения третьего порядка относительно оси Δ, при этом положение каждой диафрагмы совпадает с положением другой диафрагмы после ее поворота на 120o вокруг оси Δ.
Уравновешивающая камера СЕ сообщается с тремя камерами В, С, D в местах расположения трех зеркал М1, М2, М3, которые образуют грань F2, через три уравновешивающих капилляра СЕ1, СЕ2, CE3, которые расположены симметрично с симметрией вращения третьего порядка относительно оси Δ, при этом положение каждого капилляра совпадает с положением другого капилляра после его поворота на 120o вокруг оси Δ.
С целью обеспечить симметричное течение газа во всех камерах три капилляра СЕ1, СЕ2, CE3 можно расположить в одной и той же плоскости, перпендикулярной оси Δ. То же самое относится и к расположению трех капилляров СК1, СК2, CK3.
В рассматриваемой конструкции уравновешивающая камера СЕ обеспечивает выравнивание давления на стороне анода А в каждой из шести активных зон. Наличие в рассматриваемой конструкции катодной камеры СК с тремя соединенными с ней капиллярами СК1, СК2, СК3 обеспечивает выравнивание давления во всех шести активных зонах на стороне катода К.
При таком выравнивании давлений все шесть активных зон подвержены воздействию одного и того же перепада давлений, который определяет одинаковый расход газа в камерах даже при наличии возмущений, обусловленных возможными перепадами температуры, которые по указанным выше причинам сведены к соответствующему минимуму.
Очевидно, что уравновешивающая камера может иметь устройство для геттерирования (поглощение газа) или даже устройство, обеспечивающее нагревание блока и его тепловую компенсацию.
Описанная конструкция позволяет уменьшить свойственную прецессионному гироскопу чувствительность (уход нуля) к изменениям температуры, к влиянию эффекта Физо (Fizeau) и рабочего тока.
В предлагаемом в изобретении гироскопе оптический блок установлен на приводном механизме таким образом, что ось Δ симметрии вращения блока совпадает с приводной осью гироскопа. При этом все три камеры оптического блока вращаются с одной и той же скоростью относительной этой оси Δ вращения.
В рассматриваемом примере приводной механизм имеет прежде всего приводное колесо R1, состоящее из двух коаксиальных колец CA1, CA2, соединенных друг с другом несколькими радиальными пластинами L. Эти пластины L содержат пьезоэлектрический измерительный и приводной элемент, который соединен с усилителем и обеспечивает вращательное движение с переменной скоростью одного из колец СА2 относительно другого кольца СА1.
Крепление оптического блока 1 к центральному кольцу СА2 (приводному кольцу) приводного механизма осуществляется с помощью крепежного кольца CF1, диаметр которого по существу равен диаметру приводного кольца СА2, к которому оно коаксиально крепится винтами.
Это крепежное кольцо СF1, которое расположено коаксиально с катодом К, имеет три пары наклонных клиньев (на чертежах не показаны), которые расположены относительно друг друга под углом 120o и которые приклеиваются к соответствующим центральным участкам скошенных краев, ограничивающих по периметру грань F1 блока.
Приводной механизм имеет также уравновешивающее колесо R2, которое состоит из двух коаксиальных колец СА'1, СА'2, соединенных друг с другом несколькими упругими радиальными пластинами L'.
Как и для рассмотренного выше приводного кольца, крепление кольца СА'2 к оптическому блоку 1 (в плоскости, которая лежит по другую, чем приводное колесо R1, сторону от экваториальной плоскости) осуществляется с помощью крепежного кольца CF2, диаметр которого по существу равен диаметру кольца CF1 и которое выполнено аналогично кольцу СА'2 и коаксиально крепится к нему соответствующими винтами.
Это крепежное кольцо CF2, которое расположено коаксиально с уравновешивающей камерой СЕ, имеет три пары наклонных клиньев СВ, СВ', которые расположены относительно друг друга под углом 120o и которые приклеены к соответствующим центральным участкам скошенных краев, ограничивающих по периметру грань F2 блока.
Такой способ крепления обладает определенным преимуществом, поскольку позволяет значительно снизить касательные напряжения, возникающие между клиньями СВ и СВ' и оптическим блоком при его вращении.
Целесообразно кольца СА1 и СА'1 двух колес R1 R2 механически соединить друг с другом.
Рассмотренная конструкция обеспечивает очень хорошее уравновешивание оптического блока 1 и одновременно соответствующим образом снижает его движения по конической траектории (последнее обстоятельство в значительной степени связано с тем, что центр тяжести и центр инерции блока расположены на его приводной оси).
Кроме того, благодаря симметричному с симметрией третьего порядка относительно оси Δ расположению механических элементов блока и симметричному расположению пар крепежных клиньев СВ, СВ', обеспечивающих рассеивание тепла, в предлагаемом гироскопе удается не только сохранить, но даже и повысить тепловую симметрию.
Необходимо также подчеркнуть, что при тепловой симметрии блока относительно оси Δ, которая является осью вращения, и уравновешивании внутренних давлений анодов А, которое обеспечивается благодаря наличию уравновешивающей камеры, в предлагаемом гироскопе практически полностью исключается вероятность его потенциально возможного возбуждения при уходе нуля и снижается влияние на его характеристики внешнего теплового поля.
Целесообразно ось Δ оптического блока расположить вертикально. Объясняется это тем, что такое расположение оси блока обеспечивает симметричное течение газа и симметричное распределение разницы температур в камерах оптического блока и исключает их влияние на возможный уход нуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСКЛЮЧЕНИЯ ВЛИЯНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ В ПРИЕМНИКЕ ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА И ПРИЕМНИК ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА | 1996 |
|
RU2178953C2 |
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ СРОКА СЛУЖБЫ ТРЕХОСНОГО ГИРОСКОПА | 2007 |
|
RU2426973C2 |
| ШЛЕМ С ПРИБОРОМ НОЧНОГО ВИДЕНИЯ ПОВЫШЕННОЙ НАДЕЖНОСТИ И УЛУЧШЕННЫМИ ЭРГОНОМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ | 1996 |
|
RU2196076C2 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2011 |
|
RU2488773C2 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2011 |
|
RU2507482C2 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2017 |
|
RU2655626C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2016 |
|
RU2627566C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ОРТОГОНАЛЬНЫХ ЛИНЕЙНО ПОЛЯРИЗОВАННЫХ ВОЛН | 2016 |
|
RU2620893C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2007 |
|
RU2340873C1 |
Гироскоп включает один оптический блок с тремя оптическими камерами, квадратной формы, которые выполнены так, что каждый из углов одной камеры совпадает и сообщается с углом другой камеры, зеркала М4-М6 управления и считывающие зеркала М1-М3, которые связаны с каждой парой совпадающих углов, причем каждая из камер соединена с катодной камерой СК тремя катодными капиллярами СК1-СК3 и с уравновешивающей камерой тремя уравновешивающими капиллярами СЕ1-СЕ3. Зеркала М4-М6 управления, считывающие зеркала М1-М3, катодные капилляры СК1-СК3, уравновешивающие капилляры СЕ1-СЕ3 и аноды расположены взаимно симметрично с симметрией вращения третьего порядка вокруг приводной оси Δ (т. е. так, что положение одного из этих элементов совпадает с положением другого соответствующего элемента после его поворота на 120o вокруг оси Δ). Техническим результатом является упрощение сборки оптического блока и ограничение его движения по конической траектории. 6 з.п. ф-лы, 3 ил.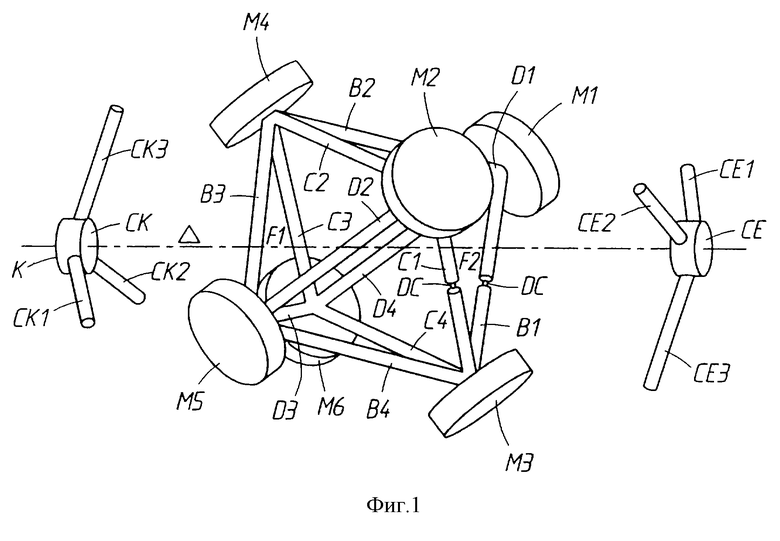
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| US 4616929 А, 14.10.1986 | |||
| КОРОБКА ПЕРЕДАЧ | 2005 |
|
RU2284925C1 |
| SU 1380564 А1, 27.12.1996 | |||
| МЕХАНИЧЕСКИ ПРОЧИЩАЕМАЯ УСТАНОВКА СЕЛЕКТИВНОГО РУЧНОГО СОЕДИНЕНИЯ | 1995 |
|
RU2137013C1 |

