Изобретение относится к способу исключения влияния многолучевого распространения в приемнике для приема сигналов местоположения от спутника и к приемнику для приема сигналов местоположения от спутника, например, к приемникам системы GPS (глобальной системы местоопределения).
В системе GPS используются группы спутников, вращающихся на точно определенных околоземных орбитах, что позволяет в любой момент определить местоположение некоторого спутника. Спутники излучают радиочастотные сигналы, содержащие навигационные данные и коды, позволяющие идентифицировать каждый спутник. Указанные коды модулируют по фазе (с использованием двухпозиционной фазовой манипуляции или модуляции BPSK) сигнал несущей частоты. Приемник GPS, размещенный либо на земле, либо на наземном, воздушном, либо водном транспортном средстве может одновременно принимать сигналы со многих спутников, производить точный расчет величины расстояния до каждого из спутников и выводить из полученной величины точное значение собственных земных координат, определяемых широтой, долготой и высотой. Из указанных полученных величин могут быть также выведены дата и точное время приема во временных координатах системы GPS. И, наконец, из указанных величин с использованием доплеровских измерений можно вывести собственный вектор скорости приемника в земных координатах (в случае приемника, смонтированного на подвижном транспортном средстве).
В системе GPS каждый спутник идентифицируют с использованием псевдослучайного кода, принадлежащего ему и модулирующего с повторами (например, через каждую миллисекунду) сигнал несущей частоты, излучаемый спутником. Существуют системы, аналогичные системе GPS, в частности система GLONASS, в которой также предусмотрен указанный псевдослучайный код, хотя он и не служит для идентификации индивидуального спутника. Предлагаемое изобретение может найти применение непосредственно в системе GLONASS, однако для простоты в дальнейшем будет рассмотрен вариант для системы GPS, а именно для "гражданской" части системы GPS, содержащей также одну часть из "оборонной" сферы, в которой настоящее изобретение равным образом может найти применение.
Псевдослучайный код является длинным кодом (1023 бит на 1,023 МГц или 1 мс), одной из главных функций которого является возможность извлечения его сигнала от спутника в случае, когда уровень шума (например, в 30 дБ) значительно превышает уровень сигнала. Подобная технология широко известна в настоящее время под названием излучения с использованием расширения спектра. Сигнал выделяют из шума с использованием корреляции, производимой в приемнике принятого сигнала, и псевдослучайного периодического кода, идентичного коду, ожидаемому в сигнале. Если коды не совпадают во времени, то между принятыми сигналами и локальным кодом, сформированным местным генератором локального кода, не существует никакой корреляции; в случае, если коды практически совпадают, наблюдается некоторая корреляция, причем энергия последней тем выше, чем больше совпадение. Однако существует возможность сформировать коррелирующий сигнал, позволяющий производить автоматическую настройку генератора локального кода до достижения точного совпадения локального кода с кодом, модулирующим сигнал со спутника. Код контура регулирования с обратной связью позволяет поддерживать это совпадение.
Псевдослучайный код излучается со спутника в точно определенные моменты времени, известные на уровне приемника. Привязка указанных временных моментов к системе отсчета производится относительно бинарного характеристического перехода (называемого "периодом"), представляющего собой начало псевдослучайного кода каждую миллисекунду. Операцию корреляции используют для определения момента поступления кода в приемник, при этом определяют характеристический момент либо временной интервал передачи локального кода и при совпадении указанного локального кода с принятым кодом, и в случае получения максимальной корреляции указанный момент представляет собой момент поступления принимаемого кода. Разность между моментом излучения кода спутником и моментом приема кода приемником позволяет определить время прохождения сигналов между спутником и приемником. Зная, что скорость прохождения сигналов совпадает со скоростью света, можно вычислить расстояние между приемником и данным спутником. Та же операция, произведенная на двух других спутниках, позволяет с помощью радиотриангуляции определить точное местонахождение приемника. Применение четвертого спутника позволяет исключить ошибки генератора синхроимпульсов приемника, причем последний синхронизируется с генератором спутников. Помимо местоположения приемника можно вычислить точное время измерения местоположения во временных координатах спутников GPS.
Уточнение определяемого местоположения основано главным образом на уточнении момента приема псевдослучайного кода. Такое уточнение зависит по существу от качества операции корреляции, поскольку определяют момент приема спутникового кода путем замера момента излучения локального кода, если последний коррелирован с принятым кодом и в предположении, что он совпадает с принятым кодом.
Операция корреляции представляет собой простое перемножение принятого сигнала (перестроенного на низкую частоту с сохранением модуляции по фазе) и локального кода, формируемого соответствующим генератором. Если коды совпадают до момента кода, подается часть энергии сигнала корреляции. Момент кода или "чип" является промежутком времени Т, разделяющим два последовательных бита (из числа 1023 бит) кода. Внутри указанного промежутка времени момента кода 2Т уровень сигнала корреляции тем выше, чем выше степень совпадения между кодами. Существует максимум сигнала корреляции, соответствующий абсолютному совпадению локального и принятого кодов.
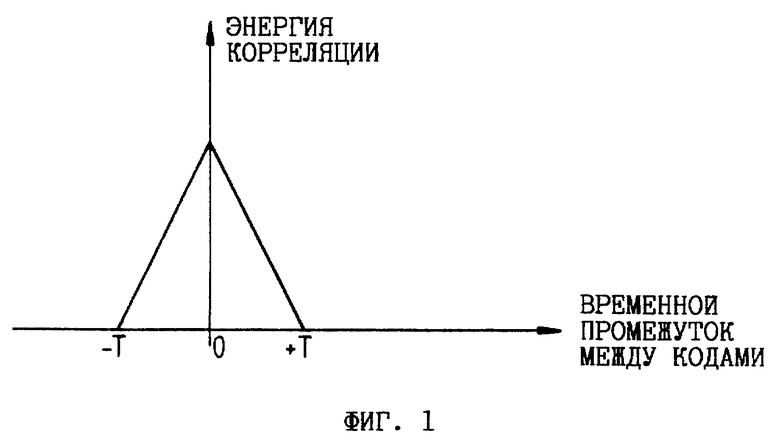
На фиг. 1 представлена функция теоретической корреляции между принятым кодом и локальным кодом, т. е. энергией сигнала корреляции в зависимости от временного промежутка между принятым и локальным кодами: она принимает нулевое значение, если коды опережают друг друга, либо отстают друг от друга более чем на промежуток времени Т. Указанная функция подразумевается линейно возрастающей при уменьшении временного промежутка между кодами от -Т до 0 и повторно линейно возрастающей при увеличении временного промежутка от 0 до +Т, причем эта функция имеет нулевое значение при значениях временных промежутков, превышающих Т. При такой форме линии треугольной корреляции вершина треугольника представляет собой точку точного совпадения кодов.
Подразумевается, что подобная треугольная форма является теоретической. На практике основание и вершина треугольника слегка закруглены согласно более или менее ограниченной полосе пропускания схем корреляции. С учетом теоретических форм следует, что изобретение основано на линейной аппроксимации корреляционных кривых.
Операция корреляции заключается в том, что локальный код сдвигают относительно принятого со спутника сигнала до тех пор, пока сигнал не достигнет максимума. По достижении результата регулируют генератор локального кода, чтобы коррелятор продолжал вырабатывать пик максимальной корреляции.
На практике неизвестны приемлемые способы регулировки на максимум функции. Значительно лучше известны способы регулировки сигнала относительно центрального нулевого значения: при положительном сдвиге фазу локального кода сдвигают вперед, а в случае отрицательного сдвига фазу задерживают.
Предпочтительно использовать функции корреляции, представляющие собой ноль при точном совпадении кодов. Существует множество способов осуществить вышеуказанную операцию, например, с применением двойных корреляторов, использующих не только локальный код, называемый точечным кодом Р, для получения совпадения с кодом со спутника, но также и код Е ("ранний"), опережающий по фазе на короткий отрезок времени d (равный или меньший Т/2) точечный код Р, и код L ("поздний"), отстающий на тот же отрезок времени d от точечного кода Р.
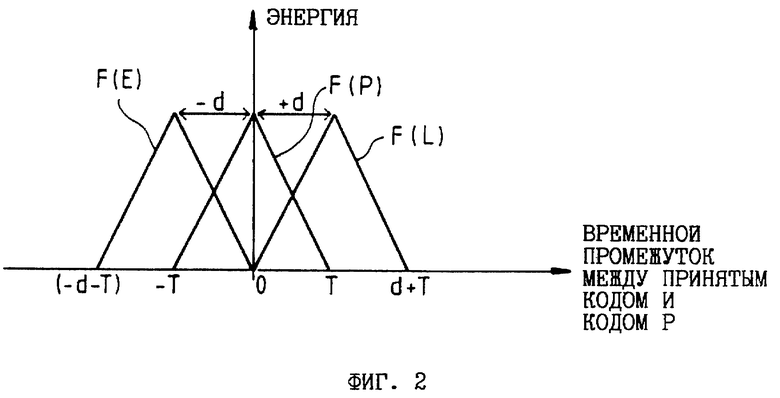
При построении графиков функций корреляции F(P), F(E), F(L) между каждым из кодов Р, Е, L и сигналом со спутника, принимая за абсциссу временной промежуток между принятым кодом и точечным кодом Р, подлежащим совмещению с принятым кодом, повторно определяют треугольник для функции F(P) по фиг. 1 и идентичные треугольники, сдвинутые влево и вправо на промежуток d для функций F(E) и F(L).
На фиг. 2 представлены функции корреляции для частного случая, когда промежуток d сдвига между кодами равен Т/2. Временной сдвиг 0 на оси абсцисс представляет собой точное совпадение между принятым кодом и локальным точечным кодом Р. Данная диаграмма может быть расшифрована следующим образом: для некоторого временного сдвига, нанесенного на ось абсцисс, можно определить значение энергии корреляции с каждым из кодов Р, Е и L, считывая значение функций F(P), F(E) и F(L) для данной величины сдвига.
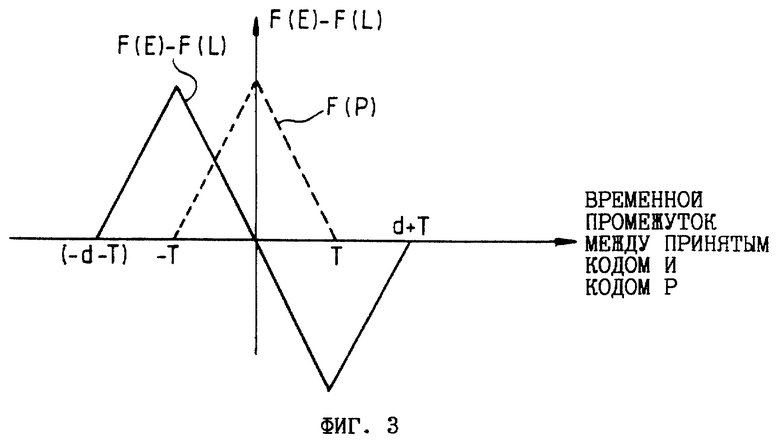
Одним из способов создания функций корреляции, принимающей нулевое значение при совпадении точечного кода Р с принятым кодом, заключается в установлении функции корреляции F(E) принятого кода с опережающим кодом Е и функции корреляции F(L) принятого кода с задержанным кодом L с последующим определением разности F(E)-F(L) между указанными функциями.
На фиг. 3 указанная разность представлена в виде сплошных линий как функция от временного сдвига между принятым и точечным кодами. Функция корреляции F(P) с точечным кодом показана пунктиром. При этом проверяют, чтобы дифференциальная корреляционная функция F(E)-F(L) представляла собой нуль в пределах точной корреляции с точечным кодом и чтобы она была линейной в окрестностях нуля.
Простым средством определения и регулировки точного порога корреляции с точечным кодом является соответственно получение разности сигналов корреляции F(E)-F(L), а также регулировка локального точечного кода (коды Е и L связаны с кодом Р) таким образом, что указанная разность F(E)-F(L) остается равной нулю.
На фиг. 2 график построен в предположении, что задержка кода L и опережение кода Е составляют ровно половину временного промежутка кода. Фиг. 3 также соответствует данному случаю. Вместе с тем сдвиг d может быть меньше половины временного промежутка кода; нуль остается в тех же пределах, а линейность в пределах нуля сохраняется.
Другой возможностью формирования функции корреляции, имеющей нулевое значение, при совпадении точечного кода с принятым кодом является создание разностного кода E-L (называемого также "ранний-минус-поздний") на основе кодов Е и L и в получении корреляции разностного кода с принятым сигналом спутника. Получаемая в результате функция корреляции F(E-L) практически идентична функции F(E)-F(L) согласно фиг. 3 и в дальнейшем предполагается, что указанные решения эквивалентны.
На практике известно явление, способное нарушить точную установку корреляции и точную установку при определении длительностей и расстояний. В данном случае речь идет о многолучевом распространении радиочастотных волн между спутником и приемником. Искомым расстоянием, подлежащим расчету, является расстояние по линии прямой видимости между спутником и приемником, однако принятый радиосигнал иногда содержит составляющие, получаемые в результате отражения от окружающих поверхностей: отражения от фасадов зданий, от металлических поверхностей кораблей и т. д.
Указанные отражения соответствуют наиболее протяженным траекториям между спутником и приемником, но недостаточны для выхода из зоны корреляции между кодами. В наиболее типичном случае зона корреляции соответствует полуторному промежутку времени кода в 1,023 МГц, что соответствует приблизительно 450 метрам длины волны, либо части временного промежутка, что соответствует ста метрам или нескольким десяткам метров. Отражение волны от здания может привести к формированию вторичной траектории волны с разностью длины траекторий в несколько десятков метров по отношению к траектории прямой видимости. В этом случае прямой и отраженный сигналы смешиваются и участвуют в процессе корреляции, но в отличающиеся моменты точного совпадения, поскольку они соответствуют различным моментам поступления псевдослучайного кода, посланного спутником.
На практике прямолинейная траектория соответствует сигналу более высокого уровня, чем отраженные траектории (которые связаны с потерями в момент отражения, а также при падении на антенну), так что основным предназначением отраженных траекторий является изменение формы корреляционной функции: вместо использования симметричной треугольной корреляционной функции можно просто предположить, что корреляционная функция деформирована (отлична от треугольной формы) и асимметрична.
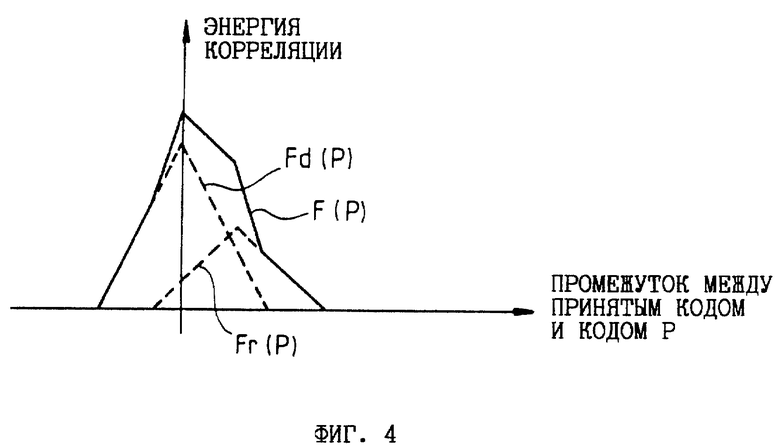
На фиг. 4 представлена типичная форма корреляционной функции, измененной из-за наличия отражения. Корреляционная кривая F(P) в виде сплошной линии является просто суммой симметричной треугольной функции (пунктирная линия), соответствующей прямолинейной траектории волны, и другой треугольной симметричной функции Fr(Р) малой амплитуды (также в виде пунктира), соответствующей отраженной траектории. Треугольники имеют смещенные во времени вершины, поскольку длины траекторий различны, и поэтому задача сводится к совмещению точечного локального кода с вершиной главного треугольника Fd(P), соответствующего прямолинейной траектории, для расчета кратчайшего расстояния между спутником и приемником.
Очевидно, что корреляционные функции F(E) и F(L) с опережающими кодами и кодами с задержкой подвергаются тем же помехам и имеют ту же форму.
В случае деформированных корреляционных функций использование множественного коррелятора Е, L, либо Р, E-L, как описано выше, вводит ошибку. Действительно, нулевое значение дифференциальной корреляционной функции F(E)-F(L) либо F(E-L) не совпадает с временным моментом, для которого точечный код совпадает с принятым кодом; в данном случае существует сдвиг между нулевым значением и максимумом корреляционной функции.
Этот феномен при построении корреляционных кривых можно объяснить кодом Р, Е и L в случае многолучевого распространения, когда кривые имеют форму, отличную от треугольной, и совпадают с кривыми, приведенными на фиг. 4.
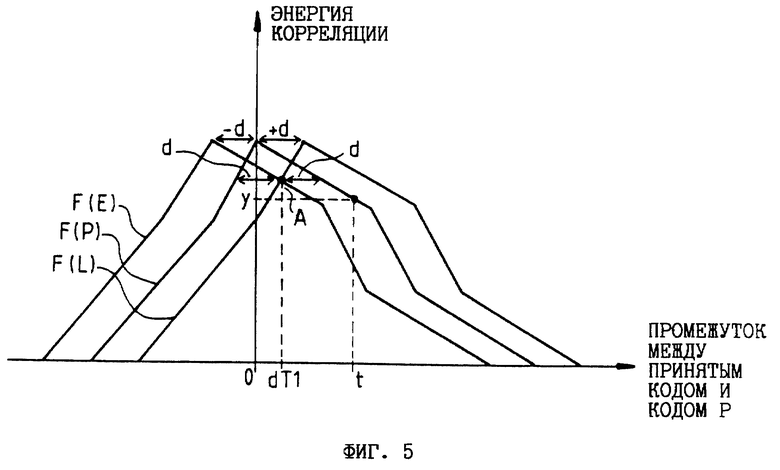
На фиг. 5 представлены три функции. Нулевое значение разности F(E)-F(L) соответствует точке пересечения А функций F(L) и F(E). Эта точка лежит не под максимумом корреляции функции F(P). Ошибка составляет dTl. Это означает, что подразумевается наложение коррелятором точечного локального кода на код спутника при их взаимном удалении на часть промежутка кода, которая может быть значительной.
Коррелятор осуществляет привязку контура регулирования с обратной связью к точке А, тогда как желательно производить его привязку к вершине функции F(P). Действительно, при вычислении местоположения GPS производят считывание в заданный момент состояния различных цифровых сигналов контура обратной связи в предположении, что точечный код Р точно синхронизован с кодом со спутника и в зависимости от указанных сигналов вычисляют время Т1, соответствующее моменту считывания. Однако точечный код не синхронен с принятым кодом: он сдвинут на временной интервал dT1 относительно принятого кода. Вычисление принятого времени Т1 сопровождается ошибкой dT1; действительное значение искомого времени вычисляется как T0 = T1-dT1, однако ошибка dT1, зависящая от множественных отражений, неизвестна.
Указанная ошибка при определении времени может вызвать ошибку позиционирования в несколько десятков метров при вычислении приемником местоположения на основе точечного локального кода, предположительно синхронизованного с кодом спутника. Эта ошибка неприемлема для большинства систем, в частности в случае статических измерений местоположений повышенной точности. В случае движущихся приемников деформации корреляционной кривой периодически изменяются, а указанный источник ошибки исключается сглаживанием.
Настоящее изобретение частично основано на предположении, что максимум деформированной корреляционной функции F(P) располагается в окрестности максимума треугольной корреляционной функции Fd(P), соответствующей прямолинейной траектории, с того момента, как отраженные траектории будут иметь меньшую амплитуду, чем прямые траектории, и при отсутствии многочисленных отраженных траекторий, поступающих на приемник с высокими амплитудами и находящихся в фазе.
Согласно изобретению предложен простой способ значительного снижения негативного влияния многолучевого распространения с полным исключением его в некоторых случаях. Способ согласно изобретению не требует исследований, сопряженных с последовательной проверкой наличия вторичных траекторий для их последующего исключения из корреляционной функции, что является сложной и длительной процедурой.
Таким образом, предлагается способ исключения влияния многолучевого распространения в приемнике, позиционируемом спутником, в котором используется корреляция с применением по меньшей мере четырех псевдослучайных кодов E1, L1, E2, L2, являющихся ответными сигналами по отношению к коду, принятому со спутника, причем коды Е1 и L1 являются соответственно опережающими и задержанными на временной промежуток d относительно точечного кода Р1, а коды E2 и L2 являются соответственно опережающими и задержанными на временной промежуток k•d относительно точечного кода Р2, где k отлично от единицы и нуля, а d равно или меньше промежутка времени Т/2, разделяющего два последовательных бита, причем этот способ отличается тем, что с целью определения местоположения приемника на основе временного местоположения принятого кода за вычетом ошибок, связанных с многолучевым распространением, производят измерения энергий корреляций и по меньшей мере одного временного момента как с использованием ответных кодов E1, L1, опережающих и задержанных на d, так и с помощью ответных кодов E2, L2, опережающих и задержанных на k•d, с последующим расчетом на основе двух указанных серий измерений и с использованием простой экстраполяции временного местоположения, соответствующего случаю k = 0, определяющему временное местоположение принятого кода.
Иными словами, изобретение основано на том предположении, что, зная значения энергий корреляции между принятым кодом и кодами E1, E2, L1, L2, т. е. с двумя различными задержками d и k•d, с использованием простой экстраполяции можно вычислить максимум корреляционной кривой. Зная значение задержки d, можно определить две точки на корреляционной кривой; соответственно задержка k•d дает возможность определить две другие точки. Указанные четыре точки определяют два сегмента, один из которых слева от максимума с одним наклоном, а другой справа - с другим наклоном, а экстраполяция указанных сегментов в вертикальном направлении дает максимум (соответствующий экстраполяции при k = 0).
Это означает, что при наложении цепи обратной связи на ошибочное временное местоположение с помощью корреляции кодами E1, L1, разделенными промежутком 2d, получают временное значение Т1 с неизвестной временной ошибкой dT1, однако если указанное временное значение дополнить величинами, измеренными на основе кодов E2, L2, разделенных другим промежутком, составляющим 2k•d, где k отличен от нуля и единицы, можно получить две серии измеренных значений, позволяющих определить с использованием простой экстраполяции точное местоположение максимума корреляции, получаемого при k = 0.
Таким образом на основе двух серий измеренных значений с использованием простой экстраполяции и не прибегая к методу последовательных приближений или метода повторных попыток получают точку привязки контуров обратной связи при отсутствии многолучевого распространения.
Можно использовать два основных варианта осуществления: в первом варианте коды Р1 и Р2 не зависят друг от друга; при этом формируют две независимые следящие системы для кодов E1, L1 (с временным сдвигом 2d) и для кодов E2, L2 (со сдвигом 2kd), обеспечивающие соответственно вычисление времен Т1 и Т2, и определяют время Т0, соответствующее k = 0, по следующей формуле экстраполяции:
T0 = (kT1-T2)/(k-1).
В этом варианте выполнения могут быть использованы два цифровых независимых канала обратной связи, функционирующих одновременно и параллельно, либо один единственный мультиплексированный во времени канал, причем в последнем случае измерения не производятся одновременно и на основе вычисленных времен необходимо определить время, разделяющее два измерения.
Согласно другому варианту осуществления изобретения используют одну цепь обратной связи (точечные коды Р1 и Р2 совмещаются) с кодами Е1 и L1, позволяющими вычислить время Т1, включающее ошибку, и измерить величины энергий корреляции y1, z1, y2, z2 между принятыми кодами и соответственно кодами Е1, L1 (с опережением и задержкой на d) и Е2, L2 (с опережением и задержкой на k•d). Вычисляют время Т1 и определяют время Т0, соответствующее экстраполяции k = 0, по следующей формуле:
T0 = T1-d(y2-z2)/(y1+z1-y2-z2).
Таким образом, выше в общих чертах описан объем заявляемого способа. Другим предметом настоящего изобретения является приемник, позиционируемый спутником и содержащий устройство для генерирования четырех псевдослучайных кодов Е1, L1, Е2, L2 в ответ на код, принятый со спутника, причем код Е1 соответственно опережает точечный код Р1 на промежуток времени d, которое равно или меньше промежутка времени Т/2, разделяющего два последовательных бита, а код L1 отстает от него на то же значение d, код Е2 опережает точечный код Р2 на k•d, а код L2 отстает от указанного точечного кода Р2 на k•d, где k не равно единице и нулю, отличающийся тем, что он содержит устройство корреляции между принятым кодом и ответными кодами, устройство измерения энергий корреляции и по меньшей мере одного принятого временного значения, причем эти устройства используют, с одной стороны, ответные коды Е1 и L1, а с другой стороны, ответные коды Е2 и L2, и устройство производимого на основе указанных двух серий измерений расчета посредством простой экстраполяции, временного местоположения, соответствующего значению k = 0, определяющего временное местоположение принятого кода.
Другие отличительные признаки и преимущества изобретения более подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых изображено:
на фиг. 1-3 - описанные выше диаграммы функций корреляции, поясняющие принцип синхронизации с использованием контура обратной связи локального точечного кода с кодом, принятым со спутника;
на фиг. 4 и 5 - ошибка при измерении результирующего времени, вызванная многолучевым распространением;
на фиг. 6 - диаграммы энергий корреляции в случае многолучевого распространения, поясняющие принцип, положенный в основу изобретения;
на фиг. 7 - первый вариант осуществления изобретения;
на фиг. 8 - диаграмма, поясняющая второй вариант осуществления изобретения;
на фиг. 9 - второй вариант осуществления изобретения.
Как показано на фиг. 5, можно отметить, что нет необходимости представлять функции корреляции опережающих и задержанных кодов F(E) и F(L): действительно, точка привязки (или синхронизации) А, для которой функции F(E) и F(L) равны, расположена на равном расстоянии от сторон кривой F(P), в частности отстоит от нее на величину d, соответствующую временному промежутку между точечным кодом и двумя другими кодами. Точка синхронизации может быть непосредственно представлена как точка, отстоящая на расстоянии d по обе стороны от функции F(P), при этом нет необходимости строить графики функций F(E) и F(L).
В данном случае в предположении, что контур обратной связи синхронизирован с точкой А, имеющей абсциссу dT1, некоторая выбранная точка с абсциссой t и ординатой у функции F(P) представляет собой измеренное значение энергии корреляции у между принятым кодом и ответным кодом, задержанным на t-dT1 по отношению к принятому коду. Энергии корреляции опережающих и задержанных кодов могут быть представлены одной кривой F(P).
Как уже было отмечено выше, предполагается, что корреляция осуществляется вычислением разности F(E)-F(L) с привязкой указанной разности к нулю и что можно в равной мере использовать корреляцию F(E-L) разностным кодом E-L либо другие виды разностной корреляции.
Из этого следует, что при использовании двух серий кодов корреляции с двумя различными разделяющими промежутками d и k•d, где k представляет собой некоторый коэффициент, находят две различных точки А и В синхронизации, соответствующие двум различным ошибкам во времени dT1 и dT2, возникающим в результате многолучевого распространения.
На фиг. 6 представлены две указанные точки привязки А и В. Особенность изобретения заключается в том, что с использованием этих двух точек путем простого расчета с использованием экстраполяции непосредственно определяют третью точку С, которая соответствует нулевому значению коэффициента k и для которой временная ошибка сводится к нулю и которая представляет точное искомое значение времени или точку максимума корреляционной функции F(P). Точка С находится на одной линии с точками А и В.
В целом можно отметить, что имея, с одной стороны, информацию об абсциссах (замеры времени) и ординатах (замеры энергии) в двух точках вблизи точки максимума С слева от указанной точки, а с другой стороны, информацию об абсциссах (замеры времени) и ординатах (замеры энергии) в двух точках вблизи точки максимума С справа от указанной точки, можно вычислить местоположение во времени точки максимума с простой экстраполяцией двух сегментов справа, определяемых указанными точками.
Согласно указанному первому варианту осуществления изобретения предусмотрены два независимых контура обратной связи. Один из них работает с кодами Е1 и L1, соответственно опережающими и задержанными на промежуток d, и использует функции корреляции F(T1) и F(L1). Он позволяет вычислить в заданный момент измерения принятое значение времени, соответствующее точке А на фиг. 6, причем контур синхронизирован с указанной точкой. Вычисленное время является временем Т1. Ошибка, вызванная многолучевым распространением, является неизвестной величиной dT1; это означает, что искомым временем является T0 = T1-dT1.
Другой контур работает с кодами Е2 и L2, опережающими и задержанными соответственно на k•d. Коэффициент k является некоторой величиной, отличной от нуля и единицы. Точкой привязки контура является точка В. Этот второй контур позволяет рассчитать полученное время Т2, соответствующее точке привязки контура. Дискретизация данных, служащих для расчета временных интервалов, производится одновременно в двух контурах с тем, чтобы сравнение времен Т1 и Т2 имело смысл. Если одновременность нарушается, вычисляют время Т'2, а для нахождения Т'2 из Т2 вычитают интервал времени, разделяющий измерения в первом контуре и измерения во втором контуре. Можно также работать в режиме мультиплексирования с одним единственным контуром, использующим поочередно коды E1, L1, а затем коды Е2, L2 при условии, что интервал времени, разделяющий моменты вычислений для задержки d и задержки k•d, точно известен; в этом случае указанный интервал может быть вычтен, чтобы вернуться в тот же режим, в котором дискретизация производилась одновременно в двух отстоящих контурах.
Ошибка в расчетах Т2 для опережения/задержки k•d составляет dT2, a искомое время равно T0 = T2 - dT2. Ошибка для k = 1 составляет dT1, причем ошибка изменяется линейно с k. Таким образом, dT2/dT1 = k.
Зная время Т1, время Т2, сводимое к тому же моменту измерения, и коэффициент k, с применением прямой экстраполяции вычисляют время Т0, соответствующее принятому сигналу прямой видимости спутника в отсутствие многолучевого распространения. Формула экстраполяции выглядит следующим образом:
T0 = (kT1-T2)/(k-1).
Таким образом, используется простейшая формула, в частности для простых значений k (k, например, равно двум).
На фиг. 7 представлена соответствующая схема для варианта с двумя контурами обратной связи без мультиплексирования.
На чертеже не представлены радиочастотные схемы, необходимые при приеме и преобразовании частот сигналов со спутников. Сигналы, преобразованные по классическому закону, оцифровываются аналого-цифровым преобразователем 10 и подаются на схему цифровой обработки сигнала, содержащую каналы обработки в количестве, соответствующем числу спутников. В случае мультиплексной обработки спутники могут быть обслужены последовательно одним и тем же каналом. Один из каналов представлен на фиг. 7.
Канал в традиционном варианте содержит двойной контур обратной связи или автоматического регулирования: для автоподстройки фазы несущей и автоподстройки фазы кода. Последний используется согласно настоящему изобретению и дублируется в данном варианте осуществления. Контур автоподстройки фазы несущей не нуждается в дублировании, однако может быть продублирован, если это представляется целесообразным с практической точки зрения.
В контуре автоподстройки фазы несущей используется в основном местный генератор 12 фазы с цифровым управлением (ГЦУ), сообщающий цифровую периодическую фазу (изменяющуюся по пилообразному закону) частоте, соответствующей частоте преобразованной несущей, с учетом доплеровского эффекта, влияющего на переданную спутником несущую. Доплеровский эффект учитывают за счет наличия контура обратной связи.
Указанная цифровая фаза преобразуется в два периодических синусоидальных сигнала, находящихся в фазе и сдвинутых по фазе на 90o схемами 14, 16, вырабатывающими косинусоидальный и синусоидальный сигналы с указанной фазой. Умножители 18, 20 позволяют производить умножение сигнала со спутника на указанные синусоидальные функции (сигнал со спутника преобразован на низкую частоту и остается модулированным по фазе псевдослучайным кодом, переданным спутником с другими параметрами модуляции).
Сигнал, умноженный на синусоидальную функцию двумя способами, а именно, на синфазную функцию (режим I) и сдвинутую по фазе на 90o (режим Q), коррелируют псевдослучайными локальными кодами с целью формирования контуров обратной связи кода, позволяющих синхронизировать локальные коды с кодами со спутника с возможностью последующего определения точного временного местоположения синхронизированных локальных кодов.
Первый контур обратной связи содержит генератор 25 кода, управляемый генератором 24 фазы с цифровым управлением, принимающим сигнал автоподстройки фазы кода.
Генератор 25 кода может генерировать два кода Е1 и L1, опережающих и задержанных на d относительно точечного кода P1. Можно также формировать код Р1 и код E1-L1, причем последний случай представлен в изобретении.
Сигнал согласно фазовому режиму I умножают на код Р1 в цифровом умножителе 26, интегрируют (в интеграторе 28 типа "интегрирование + хранение", с которого производят считывание каждую миллисекунду с одновременным обнулением). На выходе интегратора 28 представлен уровень сигнала корреляции Ip1, соответствующий режиму фазы скоррелированной точечным кодом Р1.
Также с помощью умножителей 30, 34, 38 и интеграторов 32, 36, 40 производят следующие сигналы корреляции:
- QP1, режим в квадратуре с корреляцией разностным кодом E1-L1,
- Id1, синфазный режим с корреляцией кодом Р1;
- Qd1, режим в квадратуре с корреляцией кодом E1-L1.
В классическом варианте указанные сигналы корреляции служат для расчета сигнала ошибки корреляции. Расчет производится расчетной схемой, выполненной в виде микропроцессора 50, управляющего совокупностью схем обработки сигнала и производящего расчет времени и местоположения GPS. Сигнал ошибки корреляции преимущественно получают в виде скалярного произведения двух скоррелированных векторов Ip1, Qp1 и Id1, Qd1 с частью упорядочивания Ip12+Qp12, соответствующей случаю, когда энергии принятых сигналов изменяются во времени.
Сигнал ошибки имеет следующий вид:
(Ip1•Id1+Qp1•Qd1)/(Ip12+Qp12).
Указанный сигнал ошибки подают на генератор 24, управляющий генератором 25 кода. Этот сигнал ошибки имеет нулевое значение, если энергии корреляции кодами Е1 и L1 совпадают. Контур обратной связи привязан к точке А по фиг. 6. Как указано выше, прежде чем использовать корреляцию разностным кодом (E1-L1), можно использовать разность энергий корреляции F(E1) и F(L1) для формирования сигнала ошибки контура обратной связи кода.
Расчет принятых GPS временных значений Т производится традиционным способом путем считывания, т. е. дискретизации в определенный момент, некоторого числа регистров схемы обработки сигналов, а именно, состояния фазы точечного кода Р1, определяемого практически сигналом на выходе генератора 24 фазы с цифровым управлением.
Другой расчет производится параллельно для получения сигнала фазовой ошибки несущей, предназначенный для управления цифровым генератором 12. Расчет основывается на традиционном методе оценки arctg (Qp1/Ip1).
Второй контур фазовой автоподстройки кода, независимый от первого, использует другой генератор 46 псевдослучайного кода, управляемый генератором 18 фазы с цифровым управлением. Генератор генерирует коды Е2 и L2, разнесенные на k•d относительно точечного кода Р2, сформированного генератором, либо, как указано выше, код Р2 и код E2-L2. Код Р2 идентичен коду Р1, но поскольку контуры обратной связи независимы, он не синхронизован с кодом Р1 (кроме случая отсутствия многолучевого распространения).
Второй контур обратной связи идентичен первому; на него подают цифровые сигналы с выхода умножителей 18 и 20, т. е. сигналы со спутника после преобразования частоты, аналого-цифрового преобразования и умножения на синусоидальную и косинусоидальную составляющие транспонированной несущей частоты, воспроизводимой генератором 12. Вместе с тем существует возможность разделить блоки 12, 14, 16, 18, 20 с целью сделать оба контура полностью независимыми не только для автоматического регулирования кода, но и для автоподстройки фазы несущей.
Второй контур вырабатывает сигналы Ip2, Qp2, Id2, Qd2 и один сигнал ошибки (Ip2•Id2+Qp2•Qd2)/(Ip22+Qp22). Этот контур привязан к точке В по фиг. 6, для которой энергии корреляции с опережением и задержкой идентичны.
Дискретизация регистров, а именно, фазового выхода генератора 48, производится в тот же момент, что и дискретизация в случае первого контура. Она позволяет вычислить время Т2 GPS, отличное от времени Т1, при наличии многолучевого распространения.
Указанное вычисление, а также вычисление времени Т1 производится микропроцессором 50, который управляет вычислением точки МСВ (местоположение, скорость, время) приемника GPS.
Расчет Т1 и Т2 позволяет определить с помощью экстраполяции время Т0, позволяющее вычислить действительное местоположение GPS без ошибки, вносимой многолучевым распространением.
Недостатком схемы по фиг. 7 является необходимость использования практически двух каналов обработки цифрового сигнала при определении местоположения относительно одного единственного спутника. Данный недостаток может быть устранен двумя способами. Первый состоит в том, что, как описано выше, работают в режиме временного мультиплексирования с последовательными двумя задержками k•d, вырабатываемыми генератором 25 кода. Для этого требуется точно известный интервал времени te2-te1 между моментом te1 считывания регистров после привязки контура к задержке d и моментом t2 считывания регистров после привязки контура к задержке k•d. При вычислении Т0 учитывают указанный временной интервал для осуществления экстраполяции: первое измерение дает время Т1; второе дает время Т'2; при этом время Т'2 может быть определено с учетом времени T2 по следующей формуле:
T2 = T'2-(te2 - te1).
Другой вариант заключается в одновременных вычислениях энергии с кодами Р, E1, L1, E2, L2, из которых только коды E1, L1 (задержка d) служат для автоматического регулирования контура, тогда как остальные служат исключительно для расчета энергий корреляции.
Экстраполяция в этом случае заключается в нахождении временного местоположения точки пересечения двух сегментов справа, определенных четырьмя парами соответствующих значений энергий корреляции/разброса во времени.
Данное явление пояснено ниже со ссылкой на диаграмму по фиг. 8, на которой представлена соответствующая схема его реализации.
На фиг. 8 представлена энергия корреляции между принятым сигналом и локальным точечным кодом Р в виде функции от временного промежутка между кодом, представленным в принятом сигнале, и точечным кодом Р. При формировании определяющих кодов Е1 и Е2 (с опережениями d и k•d соответственно) и кодом с задержкой L1 и L2 (с задержками d и k•d соответственно) и при такой регулировке контура корреляции кода, при которой энергия корреляции y1 = F(E1) равна энергии корреляции z1 = F(L1), местоположением, определяемым автоподстройкой, является точка А на фиг. 8 с ординатой y1= z1 и абсциссой dT1, расположенная на расстоянии d от точки D опережающей части и от точки F задержанной части кривой корреляции. Контур корреляции обеспечивает измерение ординаты y1 точки D и ординаты z1 точки F и позволяет обеспечить измерение времени Т1 на абсциссе dT1. Абсциссы точек D и F равны соответственно dT1-d и dT1+d.
Точечный код локализован в dT1 при установлении обратной связи.
В этом случае можно использовать второй замкнутый контур корреляции, создающий код с задержкой на k•d (абсцисса dT1+k•d) по отношению к точечному коду и код с опережением на k•d (абсцисса dT1-k•d), и измерять энергию корреляции между принятым кодом и кодами с задержкой. С этой целью необходимо вернуться к фиг. 8 для определения точки G абсциссы (dT1-k•d) и измерить энергию корреляции yl в этой точке; и точки Н абсциссы (dT1+К) и измерить энергию корреляции z2 в данной точке.
Формула экстраполяции заключается в том, что зная значение энергий y1, z1, у2, z2 и измеренное значение времени Т1, зафиксированное относительно точки привязки А, рассчитывают время Т0, соответствующее максимуму корреляции. Максимум определяется пересечением экстраполированных сегментов DG и FH. Формула может быть представлена в следующем виде:
T0 = T1-d(y2-z2)/(y1+z1-y2-z2).
Схема на фиг. 9 позволяет осуществить изобретение в соответствии с указанным вариантом способа измерения с использованием одного контура регулировки кода и четырех различных измеренных величин энергии корреляции с различными опережениями и задержками.
Восстановление несущей в фазе и квадратуре производится, как это показано на фиг. 7, с использованием локального генератора 12, генерирующего фазу несущей, изменяющуюся линейно по пилообразному закону, вычисления синуса и косинуса (14, 16) указанной фазы, а также с использованием умножителей 18, 20, принимающих, с одной стороны, цифровой сигнал со спутника, снимаемый с преобразователя 10, а с другой стороны, синусоидальное или косинусоидальное значения фазы несущей.
Установленные таким образом режимы синуса и косинуса коррелируются умножителями 60, 62, 64, 66, 70, 72, 74, 76 соответственно с кодом опережения E1 (опережающим на d точечный код Р), с кодом задержки L1 (задержка d), с кодом опережения Е2 (с опережением k•d) и с кодом задержки L2 (задержка k•d).
Сигналы с выходов умножителей интегрируются интеграторами 80-86 и 90-96 (типа "интегрирование и хранение") и вырабатывают следующие сигналы корреляции:
IE1, IL1, IE2, IL2 в режиме косинуса и QE1, QL1, QE2, QL2 в режиме синуса.
Значения энергий корреляции получают вычислением модуля вектора I, Q: например, энергия корреляции с кодом опережения Е2 равняется сумме следующих квадратов: IE22 + QE22.
Математическое обеспечение расчета, управляющее схемой обработки сигнала, помогает вычислить следующие значения энергий корреляции:
у1 = (IE12+QE12), представляющее собой ординату точки D на фиг. 8;
z1 = (IL12+QL12), представляющее собой ординату точки F на фиг. 8, при этом обратная связь реализована таким образом, что y1 = z1;
у2 = (IE22+QE22), представляющее собой ординату точки G;
z2 = (IL22+QL22), представляющее собой ординату точки Н.
Для осуществления обратной связи вычисляют разность энергий корреляций с задержкой и опережением для сдвига d:
(y1-z1)/(y1+z1),
где член y1+z1 является частью упорядочения. Указанная разность энергий используется для регулировки фазы генератора фазы 100 с цифровым управлением, управляющего генератором локального кода 102, имеющим несколько выходов, соответствующих кодам Е2, E1, L1, L2.
Кроме того, как следует из фиг. 7, контур несущей регулируется сигналами корреляции, используемыми для автоподстройки фазы кода. В этом случае можно вычислить значение arctg(IE1+IL1)/(QE1+QL1) для использования в качестве сигнала ошибки для управления генератором 12 фазы с цифровым управлением.
Микропроцессор управления и расчета местоположения GPS может вычислить время Т1 GPS в некоторый момент измерений при работе контура обратной связи; указанное вычисление производится считыванием фазы генератора 100 в указанный момент времени.
Микропроцессор также рассчитывает значения энергий y1, z1, y2, z2 на основе цифровых значений с выхода интеграторов 80-96.
И, наконец, производят расчет с использованием вышеприводимой формулы экстраполяции на основе значений d, y1, z1, y2 и z2 искомого времени Т0, которое служит для определения положения GPS, точно скорригированного с учетом влияния многолучевого распространения.




В заявке описаны приемники сигналов местоположения от спутника. Для снижения нежелательных влияний отражательных излучений на результаты измерений местоположения GPS, в основе которых должны содержаться лишь прямолинейные траектории радиочастотных сигналов, предложен способ, позволяющий исключить влияние многолучевого распространения радиоволн с помощью простой экстраполяции. При этом производят измерения с использованием корреляции с четырьмя псевдослучайными кодами E1, E2, L1, L2 в ответ на код, принятый со спутника. Производят первую серию измерений времен и энергий корреляции, получаемых с кодами E1, L1, соответствующими опережению и задержке d относительно точечного кода, и вторую серию измерений с кодами E2, L2, соответствующими опережению и задержке k•d (k отлично от 1 и 0). Из полученного результата с использованием линейной экстраполяции вычитают результаты измерений для k = 0, соответствующие случаю, когда многолучевое распространение радиоволн не оказывает влияния. Изобретение может быть реализовано с одним контуром обратной связи псевдослучайного кода или с двумя независимыми контурами обратной связи, что и является достигаемым техническим результатом. 2 с. и 5 з. п. ф-лы, 9 ил.
| US 5347536 A, 13.09.1994 | |||
| Спутниковая система связи | 1982 |
|
SU1072274A1 |
| US 5101416 A, 31.05.1992 | |||
| DE 3743731 A, 13.07.1992. | |||

