Текст описания в факсимильном виде (см. графическую часть).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2214327C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2312006C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2227316C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228834C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258601C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2312007C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208242C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2066626C1 |







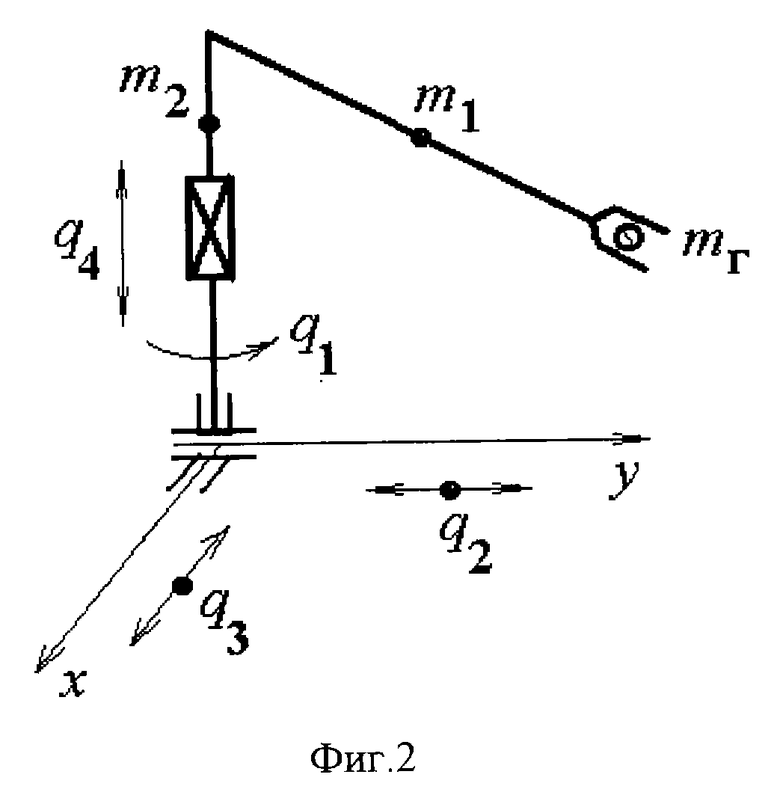

Изобретение относится к робототехнике и может быть использовано при создании приводов роботов. Устройство для управления приводом робота содержит последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, последовательно соединенные релейный блок и третий сумматор, последовательно соединенные первый датчик положения и четвертый сумматор, последовательно соединенные второй датчик скорости, квадратор и третий блок умножения, последовательно соединенные датчик массы и пятый сумматор. Двигатель связан с первым датчиком скорости непосредственно и через редуктор - с шестерней, приводящей в движение рейку, закрепленную неподвижно на основании робота. Второй вход третьего сумматора подключен к выходу первого датчика скорости, входу релейного блока и входу первого сумматора, третий вход - к выходу второго блока умножения, а выход - ко второму входу второго сумматора. Третий вход второго сумматора подключен к выходу первого сумматора. Второй вход четвертого сумматора подключен ко входу устройства, а выход - ко второму входу первого сумматора. Второй вход пятого сумматора соединен с выходом источника постоянного сигнала, а выход - с первым входом второго блока умножения. Выход датчика массы соединен со вторым входом первого блока умножения. В устройство дополнительно введены последовательно соединенные второй датчик положения, синусный функциональный преобразователь, четвертый блок умножения и шестой сумматор. Второй вход четвертого блока умножения подключен к выходу датчика ускорения. Второй вход шестого сумматора соединен с выходом третьего блока умножения, а выход - со вторым входом второго блока умножения. Второй вход третьего блока умножения через косинусный функциональный преобразователь подключен к выходу второго датчика положения. Изобретение позволяет повысить динамическую точность управления приводом робота. 3 ил.
Устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор - с шестерней, приводящей в движение рейку, закрепленную неподвижно на основании робота, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и входу первого сумматора, третий вход - к выходу второго блока умножения, а выход - ко второму входу второго сумматора, третий вход которого подключен к выходу первого сумматора, последовательно соединенные первый датчик положения и четвертый сумматор, второй вход которого подключен ко входу устройства, а выход - ко второму входу первого сумматора, последовательно соединенные второй датчик скорости, квадратор и третий блок умножения, последовательно соединенные датчик массы и пятый сумматор, второй вход которого соединен с выходом источника постоянного сигнала, а выход - с первым входом второго блока умножения, причем выход датчика массы соединен со вторым входом первого блока умножения, отличающееся тем, что в него дополнительно введены последовательно соединенные второй датчик положения, синусный функциональный преобразователь, четвертый блок умножения, второй вход которого подключен к выходу датчика ускорения, и шестой сумматор, второй вход которого соединен с выходом третьего блока умножения, а выход - со вторым входом второго блока умножения, причем второй вход третьего блока умножения через косинусный функциональный преобразователь подключен к выходу второго датчика положения.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2162792C1 |
| Воздухораспределитель равномерной раздачи воздуха | 1973 |
|
SU523252A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

