Изобретение относится к средствам пассивной радиолокации источников электромагнитных сигналов, в частности к способам местоопределения грозовых разрядов, и может быть использовано в метеорологии и в гражданской авиации для оперативного наблюдения за грозовой деятельностью на расстояниях 300÷2000 км.
Известен способ однопунктовой дальнометрии грозовых разрядов, реализованный в [1], который может быть использован при местоопределении гроз. Этот способ основан на лучевом представлении распространения электромагнитного сигнала в волноводе Земля - ионосфера, при котором сигнал грозового разряда атмосферик состоит из суммы одинаковых по форме земной волны и двух пространственных волн, первая из которых образована в результате однократного, а вторая двукратного отражения сигнала от ионосферы и состоит в том, что принимают атмосферик с помощью вертикальной электрической антенны, последовательно усиливают его, фильтруют в широкой полосе частот и проверяют полученный при этом исходный сигнал на его соответствие каждой из N заранее установленных градаций дальности путем его обработки параллельно в N каналах, каждый из которых настроен на фиксированную дальность Ln (n-1-N) до грозового разряда, при этом в каждом n-ом канале обработки из исходного сигнала выделяют интервал времени, соответствующий ожидаемому при дальности Ln до грозового разряда интервалу времени существования второй пространственной составляющей исходного сигнала, и, полагая ожидаемые отношения амплитуд пространственных составляющих к земной составляющей в исходном сигнале известными, образуют из сигнала, полученного на указанном интервале времени, вспомогательный сигнал, состоящий из суммы двух сигналов, у которых моменты прихода и амплитуды равны соответствующим ожидаемым при дальности Ln до грозового разряда значениями у земной и первой пространственной составляющих исходного сигнала, при этом образуют разностный сигнал между полученным суммарным сигналом и исходным сигналом, возводят полученный разностный сигнал в квадрат и интегрируют на интервале времени существования ожидаемых земной и первой пространственной составляющих исходного сигнала, образуя таким образом выходной сигнал канала обработки, сравнивают полученные выходные сигналы по величине и принимают дальность настройки канала обработки с минимальным выходным сигналом, за дальность до грозового разряда.
Недостатком указанного способа является увеличение погрешности оценки дальности с уменьшением расстояния до источника, вызванное уменьшением амплитуды второй пространственной волны атмосферика.
Наиболее близким к заявленному техническим решением, принятым в качестве прототипа, является способ однопунктового местоопределения источника атмосферика, реализованный в [2]. Этот способ основан на лучевом представлении распространения очень низкочастотного (ОНЧ) атмосферика, на повороте плоскости поляризации при отражении пространственных волн от ионосферы, при котором горизонтальное магнитное поле атмосферика состоит из суммы земной волны, содержащей только обыкновенный компонент, вектор которого направлен поперек трассы распространения излучатель-приемник, и пространственных волн, содержащих кроме обыкновенного также необыкновенный компонент, вектор которого направлен вдоль трассы распространения, а также на определении дальности до грозового разряда по разности моментов первого превышения электрическим полем и необыкновенным компонентом магнитного поля атмосферика установленных пороговых уровней. Этот способ состоит в том, что атмосферик принимают с помощью вертикальной электрической антенны и двух горизонтальных ортогональных магнитных антенн, сигналы с выходов магнитных антенн предварительно интегрируют для компенсации дифференцирующего действия магнитных антенн, усиливают и фильтруют в широкой полосе частот, содержащей основную энергию атмосферика, сигнал с выхода электрической антенны усиливают и фильтруют в такой же полосе частот, по начальной части полученных при этом исходных сигналов, содержащих только земную составляющую, определяют тангенс пеленгационного угла на грозовой разряд как отношение интегралов от произведения глубоко, двухсторонне симметрично ограниченного исходного сигнала с электрической антенны с каждым из исходных сигналов с магнитных антенн, при этом исходные сигналы с магнитных антенн совместно с вычисленным тангенсом пеленгационного угла используют также для получения сигнала Sн(t), образуемого необыкновенным компонентом магнитного поля, кроме того, определяют моменты первого превышения исходным сигналом с электрической антенны и сигналом Sн(t) установленных пороговых уровней и интервал времени между этими моментами, по которому, полагая высоту отражения от ионосферы известной, определяют дальность до грозового разряда, полученные тангенс пеленгационного угла и дальность используют для местоопределения грозового разряда.
Недостатком данного способа является погрешность в оценке момента прихода необыкновенного компонента магнитного поля атмосферика, вызванная существенным влиянием шумов, приводящая к погрешности в оценке дальности до грозового разряда.
Целью настоящего изобретения является повышение точности местоопределения грозового разряда за счет вычисления сигнала S0(t), образованного обыкновенным компонентом магнитного поля атмосферика, и совместной проверки сигналов Sн(t) и S0(t) на их соответствие N заранее установленным градациям дальности Ln(n=1÷N) до грозового разряда путем выделения при расчете каждой n-й градации дальности в сигнале Sн(t) интервала времени существования ожидаемой для дальности Ln первой пространственной составляющей, образования из полученного при этом сигнала многолучевого сигнала Wn(t) с интервалами между составляющими его сигналами и отношениями их амплитуд, равными соответствующим, ожидаемым при дальности Ln до грозового разряда значениям у сигнала S0(t), и принятия градации дальности, при которой форма сигнала Wn(t) наиболее близка к форме сигнала S0(t), задержанного по времени на ожидаемой для дальности Ln интервал между моментами прихода земной и первой пространственной волн атмосферика, за дальность до грозового разряда.
Поставленная цель достигается тем, что в известном способе местоопределения грозового разряда, включающем прием ОНЧ электромагнитного сигнала грозового разряда - атмосферика с помощью вертикальной электрической антенны и двух горизонтальных ортогональных магнитных антенн на интервале времени, содержащем земную и первую пространственную волны атмосферика, предварительное интегрирование сигналов с выходов магнитных антенн, их усиление и фильтрацию в требуемой широкой и одинаковой полосе частот, содержащей основную энергию атмосферика. с образованием сигналов соответственно Sх(t) и Sy(t). а также усиление сигнала с выхода электрической антенны и его фильтрацию в той же полосе частот с образованием сигнала SE(t), определение по начальным частям сигналов Sx(t), Sy(t) и SE(t), содержащим только земную составляющую, тангенса пеленгационного угла на грозовой разряд. включающее глубокое двухстороннее симметричное ограничение сигнала SE(t), перемножение полученного при этом сигнала VE(t) по отдельности с каждым из сигналов Sx(t) и Sy(t) и интегрирование полученных сигналов на заранее установленном интервале времени 0-Т0 с образованием сигналов соответственно Вx и Вy
при этом определение тангенса пеленгационного угла ψ на грозовой разряд из соотношения
tg ψ = By/(-Bx), (2)
кроме того, определение сигнала Sн(t), образуемого проекцией горизонтального вектора магнитного поля на направление распространения излучатель-приемник,
Sн(t) = Sy(t)•Bx-Sx(t)•By, (3)
а также определение дальности до грозового разряда и его местоположения, СОГЛАСНО ИЗОБРЕТЕНИЮ атмосферик принимают на интервале времени, содержащем земную и Q (Q≥1) пространственных волн атмосферика и определяют сигнал S0 (t), образуемый проекцией горизонтального вектора магнитного поля перпендикулярно направлению распространения излучатель-приемник,
S0(t)=Sy(t)•By+Sx(t)•Bx, (4)
определяют дальность до грозового разряда путем проверки соответствия сигналов Sн(t) и S0(t) каждой из N заранее установленных градаций дальности до грозового разряда, для чего обрабатывают указанные сигналы параллельно в N каналах обработки, причем в каждом n-м (n=1÷N) канале обработки, соответствующем дальности Ln до грозового разряда, в сигнале Sн(t) выделяют ожидаемый при дальности Ln до грозового разряда интервал времени существования первой пространственной составляющей с образованием сигнала Gn(t):
из которого образуют Q+1 сигналов путем параллельной задержи сигнала Gn(t) на интервалы времени τqn (q=0÷Q) и домножения на соответствующие коэффициенты Кqn, где τ0n = 0, K0n=1, τqn и Кqn - соответственно ожидаемые при дальности Ln до грозового разряда интервал времени и отношение амплитуд между q-й пространственной и земной составляющими в сигнале S0(t), а ТS - ожидаемая длительность каждой составляющей (земной и каждой из пространственных), указанные Q+1 сигналов суммируют с образованием сигнала Wn(t):
вычисляют выходной сигнал n-го канала обработки Rn как модуль коэффициента корреляции между сигналом Wn(t) и сигналом S0(t), задержанным на время τln, на интервале времени существования сигнала Wn(t):
сравнивают полученные значения Rn по величине и дальность Lm, соответствующую каналу обработки с максимальным Rn, принимают за дальность до грозового разряда Lm: Maxn(Rn), которую совместно с тангенсом пеленгационного угла ψ используют для местоопределения грозового разряда.
Новым в предложенном способе местоопределения грозового разряда по сравнению с прототипом является регистрация атмосферика на интервале времени, включающем земную и Q (Q≥1) пространственных волн, расчет сигнала S0(t), образованного обыкновенным компонентом магнитного поля атмосферика, и совместная проверка сигналов Sн(1) и S0(t) на их соответствие N заранее установленным градациям дальности Ln (n1÷N) до грозового разряда в N каналах обработки, для этого в каждом n-м канале обработки выделение в сигнале Sн(t) интервала времени существования ожидаемой для дальности Ln первой пространственной составляющей, образование из полученного при этом сигнала многолучевого сигнала Wn(t) с интервалами времени и отношениями амплитуд между составляющими его сигналами, равными аналогичным ожидаемым для дальности Ln значениям у сигнала S0(t), вычисление на заранее установленном интервале времени модуля коэффициента корреляции Rn между сигналом Wn(t) и сигналом S0(t), задержанным на интервал времени, равный ожидаемому при дальности Ln до грозового разряда интервалу времени между земной и первой пространственной волнами атмосферика, сравнение между собой по величине значений Rn (n=1÷N) и принятие дальности настройки канала с максимальным Rn за дальность до грозового разряда.
На фиг. 1 приведено расположение магнитных антенн Ах, Аy(электрическая антенна расположена в точке пересечения магнитных антенн и направлена вверх перпендикулярно плоскости чертежа), направление прихода атмосферика V, а также мгновенных значений векторов обыкновенного H0(t) и необыкновенного Hн(t) компонентов магнитного поля атмосферика (вектор Hн(t) может иметь и противоположное направление [3]). Мгновенное значение вектора E(t) электрического поля направлено вверх перпендикулярно плоскости чертежа.
На фиг. 2 приведена блок-схема устройства однопунктового местоопределения, где обозначено: 1 - электрическая антенна, 2 - первая магнитная антенна, 3 - вторая магнитная антенна, 4 - первый интегратор, 5 - второй интегратор, 6 - первый усилитель, 7 - второй усилитель, 8 - третий усилитель, 9 - первый фильтр, 10 - второй фильтр, 11 - третий фильтр, 12 - ограничитель, 13 - первый умножитель, 14 - второй умножитель, 15 - пороговый блок, 16 - первый ключевой блок, 17 - второй ключевой блок, 18 - блок синхронизации, 19 - третий интегратор, 20 - четвертый интегратор, 21 - блок изменения полярности сигнала, 22 - делитель, 23 - первая линия задержки, 24 - вторая линия задержки, 25 - третий умножитель, 26 - четвертый умножитель, 27 - блок вычитания, 28 - пятый умножитель, 29 - шестой умножитель, 30 - сумматор, 31 -первый аналого-цифровой преобразователь, 32 - второй аналого-цифровой преобразователь, 33 - первый блок памяти, 34 - второй блок памяти, 35-37 - N каналов обработки, 38 - блок выделения максимального сигнала.
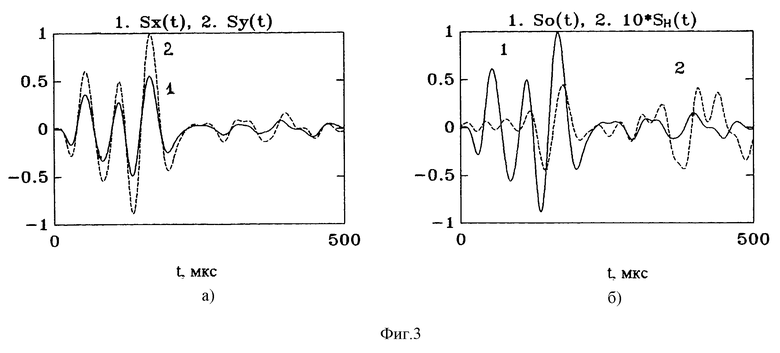
На фиг. 3, а, б приведен пример ночного атмосферика: а) Sх(t) и Sy(t) - сигналы с магнитных антенн после предварительного интегрирования усиления и фильтрации, б) S0(t) и Sн(t) -вычисленные сигналы, образованные соответственно обыкновенным и необыкновенным компонентами магнитного поля атмосферика.
На фиг. 4 приведена решающая функция дальнометрии P(Ln)=-log(1-Rn) (n= 1÷N) (для большей наглядности вместо Rn используется P(Ln) - монотонная функция от Rn, а соседние точки кривой соединены непрерывной линией), полученная при обработке атмосферика, приведенного на фиг.3.
Сущность предлагаемого способа определения местоположения гроз основана на многолучевом представлении распространения ОНЧ импульсного электромагнитного сигнала грозового разряда - атмосферика в волноводе земля - ионосфера, в результате чего атмосферик на входе приемной системы представляет собой суперпозицию земной волны, распространяющейся вдоль поверхности земли, и нескольких (q=1÷Q, Q≥1) первых пространственных волн, каждая из которых претерпевает соответственно q-кратное отражение от ионосферы, на повороте плоскости поляризации при отражении пространственных волны от ионосферы, в результате чего у горизонтальной проекции магнитного поля пространственных волн атмосферика кроме обыкновенного компонента H0(t), вектор которого направлен перпендикулярно трассе распространения, образуется необыкновенный компонент Нн(t), вектор которого направлен вдоль трассы распространения, на определении тангенса пеленгационного угла на грозовой разряд по начальной части атмосферика, содержащей только земную волну, а также на использовании для дальнометрии подобия в магнитном сигнале атмосферика формы необыкновенного компонента первой пространственной волны формам обыкновенного компонента как земной, так и Q первых пространственных волн.
Как получено в [3], амплитуда необыкновенного компонента магнитного поля атмосферика Hн(t) может доходить до 25% от амплитуды обыкновенного компонента Н0(t).
Местоопределение грозового разряда осуществляется следующим образом. Как и в прототипе [2], атмосферик принимается вертикальной электрической антенной и двумя горизонтальными ортогональными магнитными антеннами. Сигналы с выходов магнитных антенн предварительно интегрируются (для исключения дифференцирующего действия магнитных антенн и приведения сигналов, образованных земной волной, с выходов электрической и магнитных антенн к единой форме), полученная при этом пара сигналов совместно с сигналом с выхода электрической антенны усиливеются и фильтруется в одинаковой полосе частот 2-35 кГц, содержащей основную энергию атмосферика, с образованием сигналов соответственно Sх(t), Sy(t) и SE(t). Определяется начало атмосферика как момент первого превышения сигналом SE(t) установленного порогового уровня. Вначале с использованием сигналов Sx(t), Sy(t) и SE(t) определяется тангенс пеленгационного угла ψ на грозовой разряд [2], для чего сигнал SE(t) глубоко двухсторонне симметрично ограничивается, а полученный при этом сигнал VE(t) перемножается по отдельности с сигналами Sx(t) и Sy(t) и интегрируется на интервале времени 0-T0, содержащем только земную волну атмосферика (земные составляющие сигналов Sx(t) и S y(t)), не содержащую необыкновенного компонента магнитного поля, а Т0, определяется максимальной оцениваемой дальностью, например ночью при дальности LМАКС=2000 км Т0 ≈ 50 мкc, с образованием в результате сигналов Вх и Ву (1), отношение которых используются для вычисления тангенса пеленгационного угла ψ (2) на источник излучения.
Кроме того, сигналы Вx и Вy используются для получения из сигналов Sх(t) и Sy(t) сигнала Sн(t), образованного необыкновенным компонентом магнитного поля (3),
где 
Так как земная волна не содержит необыкновенного компонента магнитного поля, сигнал Sн(t) представляет собой суперпозицию Q первых пространственных составляющих
где Sнq(t-τq(L)) - сигнал, образованный необыкновенным компонентом q-ой пространственной волны магнитного поля атмосферика, а τq(L) (q=1÷Q) - интервал времени между q-й пространственной и земной волнами атмосферика. Зависимости τq(L) (q= 1÷Q) от дальности L определяются из геометрического представления распространения земной и q-й пространственной волн атмосферика:
где r = 6370 км - радиус Земли, c = 3•105 км/c - скорость распространения электромагнитного сигнала в свободном пространстве, h - эффективная нижняя отражающая высота ионосферы (h ≈ 67 км днем, h ≈ 87 км ночью).
В предлагаемом способе однопунктового определения местоположения гроз для дальнометрии грозового разряда дополнительно определяется сигнал SO(t), образованный обыкновенным компонентом магнитного поля, (4):
у которого земная и каждая из Q первых пространственных составляющих полагаются одинаковыми по форме, откуда при дальности L до грозового разряда сигнал SO(t) имеет вид:
где Z(t) - заранее неизвестный образующий сигнал, совпадающий с сигналом, соответствующим обыкновенному компоненту магнитного поля земной волны атмосферика,  KO(L)=1, а Кq(L) (q=1÷Q) -отношение амплитуд (с учетом знака) между обыкновенными компонентами магнитного поля q-й пространственной и земной волнами атмосферика. Зависимости Кq(L) (q=1÷Q) от дальности L считаются известными.
KO(L)=1, а Кq(L) (q=1÷Q) -отношение амплитуд (с учетом знака) между обыкновенными компонентами магнитного поля q-й пространственной и земной волнами атмосферика. Зависимости Кq(L) (q=1÷Q) от дальности L считаются известными.
При этом предполагается, что в (8) сигнал SH1(t), образованный необыкновенным компонентом магнитного поля первой пространственной волны атмосферика, совпадает по форме с образующим сигналом Z(t) (10) с точностью до амплитуды, полярности и момента прихода: Sн1(t) = α(L)•Z(t-τ1(L)), где α(L) заранее неизвестно.
На фиг.3 приведен пример ночного атмосферика, принятого с расстояния L ≈ 570 км, где фиг.3,а) Sх(t) и Sy(t) - сигналы с выходов магнитных антенн после предварительного интегрирования. усиления и фильтрации, фиг.3,б) S0(t) и Sн(t) - вычисленные сигналы, образуемые соответственно обыкновенным и необыкновенным компонентами магнитного поля (сигнал Sн(t) дан с увеличением в 10 раз). На фиг.3,а) и 3,б) каждая пара сигналов нормирована к единице с сохранением отношений амплитуд в паре (Вычисленный азимутальный угол на грозовой разряд составил ψ ≈121o).
Вычисленные сигналы S0(t) и Sн(t) проверяются на их соответствие N заранее установленным градациям дальности Ln (n=1÷N) до грозового разряда путем их обработки параллельно в N каналах, каждый из которых настроен на соответствующую дальность. В каждом n-м канале обработки в сигнале - Sн(t) (8) выделяется интервал времени существования ожидаемого для дальности Ln, необыкновенного компонента первой пространственной волны атмосферика Sн1(t-τ1(L)
τ1n≤t<τ1n+Ts, (11)
где τ1n = τ1(Ln) - ожидаемое запаздывание прихода первой пространственной волны атмосферика относительно земной волны при дальности Ln до источника излучения, а ТS - ожидаемая длительность образующего сигнала Z(t) (TS составляет 80-100 мкс) с образованием сигнала Gn(t) (5) (в случае прихода атмосферика с расстояния L=Ln на выделенном интервале времени присутствует необыкновенный компонент только первой пространственной составляющей - Sн1(t), откуда Gn(t) = Sн1(t-τ1n)), полученный сигнал Gn(t) используется как базовый сигнал с заменой им сигнала Z(t) в (10) для образования многолучевого сигнала Wn(t) (6) аналогично тому, как образуется сигнал S0(t) при дальности Ln до грозового разряда, что осуществляется путем параллельной (Q+1)-кратной задержки сигнала Gn(t) на интервалы времени τqn = τq(Ln) (q=0÷Q) и домножения на соответствующие коэффициенты Кqn Kq(Ln), где τ0n = 0, K0n=1, τqn и Кqn- соответственно ожидаемые при дальности Ln до грозового разряда интервал времени и отношение амплитуд между q-й пространственной и земной составляющими в сигнале S0(t), указанные Q+1 сигналов суммируются с образованием сигнала Wn(t) (6). (В канале обработки, настроенном на дальность, совпадающую с дальностью до источника атмосферика, полученный сигнал Wn(t) связан с сигналом S0(t) соотношением Wn(t) = an•So(t-τ1n) т. е. сигнал Wn(t) совпадает по форме с сигналом S0(t) и задержан относительно него на время τ1n). Для определения канала обработки, дальность настройки которого совпадает с дальностью до источника принятого атмосферика, в каждом n-м канале обработки определяется подобие форм сигнала Wn(t) и сигнала S0(t), задержанного на время τ1n, для чего вычисляется модуль коэффициента корреляции Rn (7) между сигналом Wn(t) и сигналом So(t-τ1n), и дальность Lm настрочи канала обработки, соответствующего максимальному Rn, принимается за дальность до грозового разряда - Lm: Махn(Rn). При этом вычисленное значение Rm= Maxn(Rn) может быть использовано как показатель надежности полученной оценки дальности до грозового разряда - оценку дальности можно считать надежной, если величина Rm превышает установленный пороговый уровень.
Полученные значения tg(ψ) и L=Lm используются для определения местоположения грозового разряда. В декартовой системе координаты местоположения грозового разряда определяются из соотношений:
На фиг.4 приведен результат дальнометрии атмосферика, представленного на фиг. 3, при этом для наглядности в качестве решающей функции используется монотонная функция от Rn P(Ln)= -log(1-Rn) (n= 1÷N), а соседние точки на графике соединены непрерывной линией. Как видно из приведенного графика, полученная решающая функция P(Ln) при дальности L≈570 км имеет максимум, равный P(Lm) 5, что соответствует Rm≈0,993.
Предлагаемый способ местоопределения включает следующую последовательность операций: а) принимают электромагнитный сигнал грозового разряда - атмосферик на интервале времени, содержащем земную волну и не менее одной пространственной волны, на вертикальную электрическую 1 и две горизонтальные ортогональные магнитные антенны 2,3, б) сигналы с выходов магнитных антенн предварительно интегрируют в интеграторах 4,5, в) усиливают все три полученные сигнала в усилителях 6-8, г) фильтруют их в широкой и одинаковой полосе частот с помощью фильтров 9-11, д) сигнал с выхода фильтра 9 двухсторонне глубоко симметрично ограничивают в ограничителе 12, е) перемножают полученный при этом сигнал по отдельности с каждым из сигналов с выходов фильтров 10,11 в умножителях соответственно 13,14, ж) выходные сигналы которых последовательно пропускают через ключи соответственно 16,17 для выделения интервала времени, содержащем только земную волну атмосферика, и з) интегрируют в интеграторах соответственно 19,20, и) выходные сигналы которых, причем сигнал с выхода 19 после изменения полярности в блоке 21, подают соответственно на второй и первый входы делителя 22, на выходе которого, являющимся первым выходом устройства, вырабатывается тангенс пеленгационного угла на грозовой разряд, кроме того, сигнал с выхода фильтра 10 после задержки в блоке задержки 24 к) перемножают параллельно с выходными сигналами интеграторов 20,19 в умножителях соответственно 26,29, а сигнал с выхода фильтра 11 после задержки в блоке задержки 23 л) перемножают параллельно с выходными сигналами интеграторов 19,20 в умножителях соответственно 25,28, м) из выходных сигналов умножителей 25,26 получают в блоке 27 разностный сигнал, образованный необыкновенным компонентом магнитного поля, а н) выходные сигналы умножителей 28,29 суммируют в блоке 30, получая сигнал, образованный обыкновенным компонентом магнитного поля, при этом сигналы, полученные на выходах блоков 27,30, последовательно о) оцифровывают в АЦП соответственно 31,32 и п) запоминают в блоках памяти соответственно 33,34, выходные сигналы которых р) подают параллельно соответственно на первые и на вторые входы N каналов обработки 35-37, выходные сигналы которых с) сравнивают по величине в блоке сравнения 38, N выходов которого являются вторым выходом устройства, каждый из выходов блока сравнения 38 соответствует фиксированной дальности до грозового разряда, при этом на одном из выходов блока 38, соответствующем каналу обработки с максимальным выходным сигналом, вырабатывают постоянный сигнал, указывающий на канал обработки, дальность настройки которого принимают за дальность до грозового разряда, т) кроме того, сигнал с выхода фильтра 9 сравнивают в пороговом блоке 15 с пороговым уровнем, при первом превышении которого коротким импульсным сигналом с выхода порогового блока у) включают блок синхронизации 18, при этом ф) сигналом с первого выхода блока синхронизации открывают на заранее установленный интервал времени по второму входу ключи 16,17, х) сигналом с второго выхода блока синхронизации в начальный момент времени обнуляют по вторым входам интеграторы 19,20, ц) сигналом с третьего выхода блока синхронизации с требуемой задержкой включают в работу первый и второй блоки памяти 33,34, ч) сигналом с четвертого выхода блока синхронизации с требуемой задержкой включают в работу каналы обработки 35-37, при этом ш) в каждом канале обработки в сигнале с выхода блока вычитания 27 выделяют фиксированный интервал времени, на котором ожидается присутствие только первой пространственной волны атмосферика, щ) из полученного при этом сигнала образуют Q+1 сигналов путем его задержки на заранее установленные интервалы времени и домножения на соответствующие заранее известные коэффициенты, ы) суммируют полученные Q+1 сигналов, э) вычисляют модуль функции корреляции между полученным суммарным сигналом и сигналом с выхода сумматора 30 на заранее установленном интервале времени, ю) полученный при этом сигнал считают выходным сигналом указанного канала обработки. Каналы обработки 35-37 и блок сравнения 38 реализованы на ЭВМ РС-486/200 МГц.
В качестве блоков 4-17, 19-30 и 33-34 использованы стандартные блоки на интегральных микросхемах, приведенные в [4], блоки 31, 32
-стандартные аналого-цифровые преобразователи. При реализации предлагаемого способа устанавливается:
- электрическая антенна 1 - вертикальная штыревая, длиной 3 м (действующая высота 1,5 м),
- магнитные антенны 2,3 - ферритовые, изготовленные из полос аморфного ферромагнетика с μ=20000, расположенные по сторонам квадрата длиной 60 см, с действующей высотой 5 мм на частоте 10 кГц.
- усилитель 6 - линейный, переменного тока, широкополосный с регулируемым коэффициентом усиления 20-200,
- усилители 7,8 - линейные, переменного тока, широкополосные с регулируемым коэффициентом усиления 5000-50000,
- фильтры 9-11 - полосовые с полосой пропускания F=2÷35 кГц,
- длительность задержки сигнала в блоках 23,24 60 мкс,
- АЦП 31,32 10-разрядные с шагом по времени Δt=1 мкс,
- блоки памяти 33,34 каждая объемом 1024 слова,
- время обработки атмосферика 5 с,
- диапазон дальностей способа 300÷2000км,
- относительное расхождение градаций дальности соседних каналов обработки от средней дальности этих каналов ≈5%,
- количество каналов обработки N=35,
- количество используемых пространственных волн Q=1÷3
- относительное уменьшение погрешностей местоопределения гроз по сравнению с прототипом ≈ 10%.
Технический результат использования предложенного способа по сравнению с прототипом состоит в повышении точности однопунктовой дальнометрии источников атмосфериков, что может быть использовано в метеорологии и гражданской авиации.
Литература
1. Епанечников В. А. Устройство однопунктового определения дальности до источника грозового разряда. Патент 2001416 РФ, 15.10.93. Кл. МКИ G 01 $ 13/95.
2. Епанечников В. А. Способ однопунктового местоопределения источника атмосферика и устройство для его осуществления. Патент 2090903 РФ, 20.10.97, Кл. МКИ G 01 S 13/95.
3. Кашпар Ю. В., Никитин А. А., Орлов А.Б. Измерение отраженных от ионосферы сигналов СДВ // Радиотехника и электроника. 1979. Т.24. 7. С.1316-1322.
4. "Аналоговые цифровые интегральные микросхемы"// под ред. С.В. Якубовского, М., Радио и связь, 1985.


Изобретение относится к радиотехническим средствам пассивной локации для определения местоположения источников импульсного электромагнитного излучения и может быть использовано для измерения местоположения грозовых разрядов на расстояниях 300-2000 км в метеорологии и в гражданской авиации для повышения безопасности полетов. Электромагнитный сигнал грозового разряда (атмосферик) принимается вертикальной электрической антенной и двумя ортогональными горизонтальными магнитными антеннами, определяется азимутальный угол на источник, кроме того, определяются обыкновенный и необыкновенный компоненты горизонтального магнитного поля, которые проверяются на их соответствие N градациям дальности, в каждой из которых из необыкновенного компонента магнитного поля образуется многолучевой сигнал, соответствующий этой градации дальности. Дальность настройки канала, в котором форма полученного сигнала наиболее близка к форме сигнала, соответствующего обыкновенному компоненту магнитного поля, принимается за дальность до грозового разряда. Достигаемым техническим результатом является повышение точности местоопределения грозовых разрядов. 4 ил.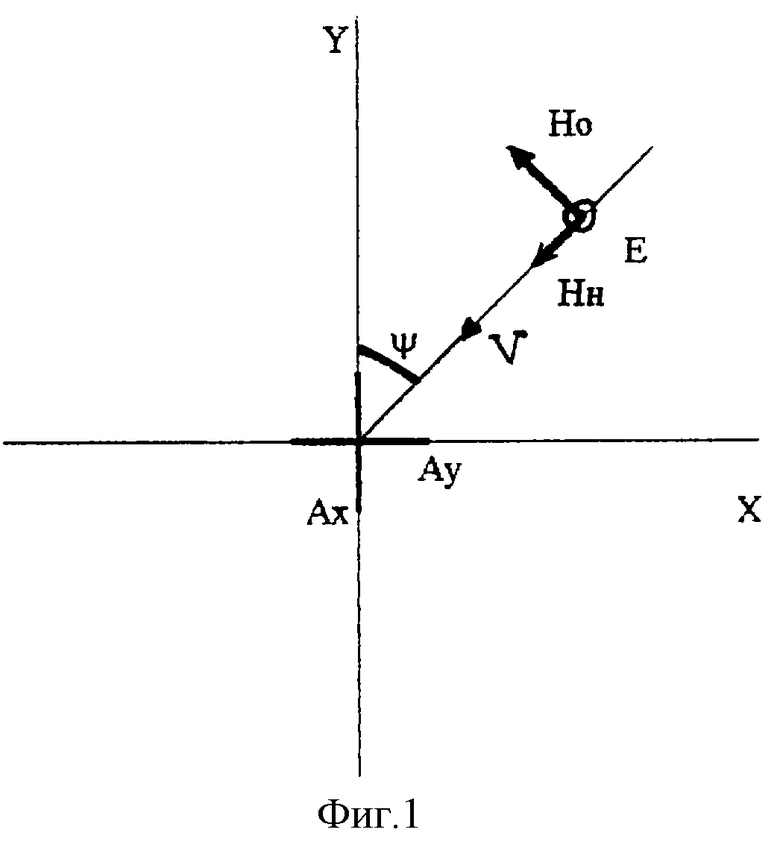
Способ однопунктового определения местоположения гроз, заключающийся в том, что электромагнитный сигнал грозового разряда - атмосферик принимают с помощью вертикальной электрической антенны и двух горизонтальных ортогональных магнитных антенн на интервале времени, содержащем земную и первую пространственную волны атмосферика, предварительно интегрируют сигналы с выходов магнитных антенн, усиливают их и фильтруют в требуемой широкой и одинаковой полосе частот, содержащей основную энергию атмосферика, с образованием сигналов соответственно Sx(t) и Sy(t), сигнал с выхода электрической антенны усиливают и фильтруют в той же полосе частот с образованием сигнала SE(t), по начальной части сигналов Sx(t), Sy(t) и SE(t), содержащих только земную составляющую, определяют тангенс пеленгационного угла на грозовой разряд, для чего глубоко двухсторонне симметрично ограничивают сигнал SE(t), полученный при этом сигнал VE(t) перемножают по отдельности с каждым из сигналов Sx(t) и Sy(t) и интегрируют на заранее установленном интервале времени 0-Т0 с образованием сигналов соответственно Вх и Ву

определяют тангенс пеленгационного угла ϕ на грозовой разряд из соотношения
tg(ϕ)= Ву/(-Вх),
кроме того, определяют сигнал Sн(t), образуемый проекцией горизонтального вектора магнитного поля на направление распространения излучатель-приемник,
Sн(t)= Sy(t)•Bx-Sх(t)•By,
а также определяют дальность до грозового разряда и его местоположение, отличающийся тем, что атмосферик принимают на интервале времени, содержащем земную и Q (Q≥1) пространственных волн атмосферика и определяют сигнал S0(t), образуемый проекцией горизонтального вектора магнитного поля перпендикулярно направлению распространения излучатель-приемник,
S0(t)= Sy(t)•By+Sx(t)•Bx,
определяют дальность до грозового разряда путем проверки соответствия сигналов Sн(t) и S0(t) каждой из N заранее установленных градаций дальности до грозового разряда, для чего обрабатывают указанные сигналы параллельно в N каналах обработки, в каждом n-м (n= 1÷N) из которых, соответствующем дальности Ln, до грозового разряда, в сигнале Sн(t) выделяют ожидаемый при дальности Ln, до грозового разряда интервал времени существования первой пространственной составляющей с образованием сигнала Gn(t)
из которого образуют Q+1 сигналов путем параллельной задержки сигнала Gn(t) на интервалы времени τqn (q= 0÷Q) и домножения на соответствующие коэффициенты Кqn, где τ0n = 0, К0n= 1, τqn и Кqn - соответственно ожидаемые при дальности Ln до грозового разряда интервал времени и отношение амплитуд между q-й пространственной и земной составляющими в сигнале S0(t), a ТS - ожидаемая длительность каждой составляющей земной и каждой пространственной в сигнале S0(t), указанные Q+1 сигналов суммируют с образованием сигнала Wn(t)
вычисляют выходной сигнал n-го канала обработки Rn как модуль коэффициента корреляции между сигналом Wn(t) и сигналом S0(t), задержанным на время τln, на интервале времени существования сигнала Wn(t)
сравнивают полученные значения Rn по величине и дальность Lm: Maxn(Rn), соответствующую каналу с максимальным Rn, принимают за дальность до грозового разряда, которую совместно с тангенсом пеленгационного угла ϕ используют для местоопределения грозового разряда.
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
| СПОСОБ ОДНОПУНКТОВОЙ ДАЛЬНОМЕТРИИ ИСТОЧНИКОВ АТМОСФЕРИКОВ | 1998 |
|
RU2138063C1 |
| US 5175551, 29.12.1992 | |||
| SU 4649388, 10.03.1987. | |||

