Настоящее изобретение относится к связи с расширенным спектром. Более конкретно настоящее изобретение касается новых и усовершенствованных способа и устройства для вхождения [в связь] в среде связи с расширенным спектром.
Использование метода модуляции множественного доступа с кодовым разделением каналов (МДКР) (CDMA) является одним из нескольких методов для облегчения связи, в которой присутствует большое число пользователей системы. Из уровня техники известны и другие методы для систем связи с множественным доступом, такие как множественный доступ с временным разделением (МДВР) (ТДМА) и множественный доступ с частотным разделением (МДЧР) (FDMA). Однако метод модуляции МДКР с расширенным спектром имеет значительные преимущества над остальными методами модуляции для систем связи с множественным доступом. Использование метода МДКР в системах связи с множественным доступом описано в патенте США 4901307, выданном 13 февраля 1990 г., озаглавленном "Система связи с множественным доступом с расширенным спектром, использующая спутниковые или наземные ретрансляторы", принадлежащем заявителю настоящего изобретения, описание которого включено сюда посредством ссылки.
МДКР, будучи по своей природе широкополосным сигналом, предлагает вид частотного разнесения путем распределения энергии сигнала по широкой полосе частот. Поэтому селективные частотные замирания воздействуют лишь на малую часть полосы частот сигнала МДКР.
Разнесение по пространству или по трактам получается путем обеспечения множества сигнальных трактов через одновременно работающие линии от подвижного пользователя через два или более сотовых узла. Кроме того" разнесение по трактам можно получить с использованием многотрактовой среды через обработку с расширенным спектром, позволяя раздельно принимать и обрабатывать сигналы, поступающие с разными задержками распространения. Примеры использования разнесения по трактам иллюстрируются патентом США 5101501, выданным 31 мая 1992, озаглавленным "Мягкая передача [связи] в сотовой телефонной системе МДКР", и патентом США 5109390, выданным 28 апреля 1992, озаглавленным "Приемник с разнесением в сотовой телефонной системе МДКР", оба этих патента принадлежат заявителю настоящего изобретения и включены сюда посредством ссылки.
Вредные эффекты от замираний могут в определенной степени контролироваться в системе МДКР путем управления мощностью передачи. Система для управления мощностью сотового узла и подвижного блока рассматривается в патенте США 5056109, выданном 8 октября 1991, озаглавленном "Способ и устройство для управления мощностью передачи в сотовой подвижной телефонной системе МДКР", по заявке 07/433031, поданной 7 ноября 1989, также принадлежащем заявителю настоящего изобретения. Использование метода МДКР в системе связи с множественным доступом дополнительно рассматривается в патенте США 5103459, выданном 7 апреля 1992, озаглавленном "Система и способ для генерирования формы сигнала в сотовой телефонной системе МДКР", принадлежащем заявителю настоящего изобретения, описание которого включено сюда посредством ссылки.
Вышеупомянутые патенты описывают использование пилот-сигнала, применяемого для вхождения. Использование пилот-сигнала позволяет подвижной станции своевременно входить в систему связи местной базовой станции. Подвижная станция получает информацию синхронизации и информацию об относительной мощности сигнала из принятого пилот-сигнала.
В идеальной системе, где время настройки оборудования равно нулю, идеальным было бы окно поиска, состоящее из одной гипотезы. Однако из-за того, что требуется время для настройки оборудования, чтобы провести поиски, окна гипотез проверяются. Чем дольше время, требуемое для настройки оборудования, тем больше необходимый размер окна. В сложных системах требуется поисковое устройство для поиска окна из многих гипотез, и при нахождении подходящей синхронизированной последовательности оно будет повторять поиск в этом окне заранее заданное число раз для подтверждения синхронизации. Этот процесс требует неприемлемо долгого времени вхождения. Настоящее изобретение обеспечивает способ и устройство для сокращения времени, потребного для вхождения пилот-сигнала в подвижной системе связи.
Настоящее изобретение представляет новые и усовершенствованные способ и устройство, которые сокращают время вхождения прямой линии связи подвижного блока. Преимуществом настоящего изобретения является минимизация общего времени на вхождение путем ускорения методологии поиска без наложения излишних штрафов за неправильное вхождение.
Настоящее изобретение обеспечивает способ определения синхронизации ПШ последовательности в системе связи с расширенным спектром и с последовательностью для непосредственной модуляции несущей, содержащий операции:
вычисления первого набора значений энергии корреляции сигнала для первого набора смещаемых во времени ПШ последовательностей;
сравнения упомянутого первого набора значений энергии корреляции сигнала с первым пороговым значением; выбора второго набора ПШ последовательностей в соответствии с упомянутым первым набором значений энергии корреляции сигнала;
вычисления второго набора значений энергии корреляции сигнала для упомянутого второго набора ПШ последовательностей, причем упомянутый второй набор ПШ последовательностей является поднабором упомянутого первого набора ПШ последовательностей; и
выбора упомянутой синхронизированной ПШ последовательности из упомянутого второго набора ПШ последовательностей в соответствии с упомянутым вторым набором значений энергии корреляции сигнала.
Способ также дополнительно содержит операцию сравнения упомянутого второго набора значений энергии корреляции сигнала со вторым пороговым значением.
Устройство для выбора синхронизированной последовательности демодуляции, содержащее:
генератор последовательностей для приема первого управляющего сигнала для выдачи множества последовательностей демодуляции в ответ на упомянутый управляющий сигнал;
демодулятор для приема упомянутого принятого сигнала и для демодуляции принятого сигнала в соответствии со множеством последовательностей демодуляции для выдачи множества сжатых сигналов;
коррелятор для приема упомянутого множества сжатых сигналов и для расчета значений энергии корреляции сигнала для упомянутого множества сжатых сигналов;
контроллер поискового устройства для приема упомянутых значений энергии корреляции сигнала, а также для выдачи упомянутого первого управляющего сигнала и для выдачи второго управляющего сигнала в соответствии с упомянутыми значениями энергии корреляции сигнала;
в котором упомянутый генератор служит еще и для приема упомянутого второго управляющего сигнала и для выдачи второго множества последовательностей демодуляции в ответ на упомянутый второй управляющий сигнал, при этом упомянутое второе множество последовательностей демодуляции является поднабором упомянутого первого множества последовательностей демодуляции.
Систему для выбора синхронизированной последовательности демодуляции, содержащую
генератор последовательностей со входом для приема первого управляющего сигнала и с выходом;
демодулятор со входом, подключенным к упомянутому выходу генератора последовательностей, и с выходом;
коррелятор со входом, подключенным к упомянутому выходу демодулятора, и с выходом; и
контроллер поискового устройства со входом, подключенным к упомянутому выходу коррелятора.
Краткое описание чертежей
Признаки, цели и преимущества настоящего изобретения станут яснее из подробного нижеприведенного описания, рассматриваемого вместе с чертежами, на которых одинаковые ссылочные позиции обозначают одно и то же на всех чертежах.
Фиг.1 является блок-схемой настоящего изобретения.
Фиг.2 является иллюстрацией развертки энергии по смещениям во времени на элемент сигнала для фиксированного окна.
Фиг. 3 является блок-схемой алгоритма, представляющей воплощение поискового алгоритма с фиксированным размером окна.
Фиг.4 является иллюстрацией развертки энергии по смещениям во времени на элемент сигнала для масштабируемого окна по настоящему изобретению.
Фиг. 5 является блок-схемой алгоритма, представляющей воплощение масштабируемого окна по настоящему изобретению.
В системе связи с расширенным спектром для синхронизации по фазе и частоте подвижной станции к передачам базовой станции используется пилот-сигнал. В примерном выполнении система связи с расширенным спектром является системой связи с расширенным спектром и с последовательностью для непосредственной модуляции несущей. Примеры таких систем рассмотрены в патенте США 5056109 и патенте США 5103459. В системе связи с расширенным спектром и с последовательностью для непосредственной модуляции несущего колебания передаваемые сигналы распределены по частотному диапазону большему, чем полоса частот, минимально необходимая для передачи информации посредством модуляции несущего колебания сигналом данных, затем вновь модуляции результирующего сигнала сигналом, распределенным в широкой полосе частот. В пилот-сигнале данные могут рассматриваться как последовательность из одних единиц.
Расширенный сигнал обычно генерируется регистром сдвига с линейной обратной связью, выполнение которого подробно описано в вышеупомянутых патентах. Расширенный сигнал может рассматриваться как вращающийся вектор на комплексной плоскости в виде:
s(t) = A•e-ωt+Ф. (1)
Для вхождения в связь подвижная станция должна синхронизироваться по принятым от базовой станции сигналам как по фазе Ф, так и по частоте ω. Цель работы поискового устройства - найти фазу Ф принятого сигнала. После нахождения фазы Ф распределенного сигнала частота находится при помощи демодулирующего элемента, который имеет оборудование для слежения как за фазой, так и за частотой. Способ, которым подвижное устройство находит фазу принятого сигнала, состоит в проверке набора фазовых гипотез, именуемого окном, и в определении того, правильна ли одна из предполагаемых фазовых гипотез, именуемая также гипотезой смещения.
Обратимся теперь к чертежам. Фиг.1 представляет устройство по настоящему изобретению. При включении питания сигнал с расширенным спектром принимается антенной 2. Назначением устройства является усиление синхронизации между псевдошумовыми (ПШ) последовательностями, генерируемыми генератором 20 ПШ последовательностей, и принимаемым сигналом с расширенным спектром, который расширен идентичными ПШ последовательностями неизвестной фазы.
В примерном выполнении и модулятор, который расширяет пилот-сигнал, и ПШ генератор 20 являются сдвиговыми регистрами максимальной длины, которые генерируют ПШ кодовые последовательности соответственно для расширения и сжатия пилот-сигнала. Таким образом, операция достижения синхронизации между кодами, используемыми для сжатия принятого пилот-сигнала, и ПШ расширенным кодом принятого пилот-сигнала включает в себя определение временного смещения сдвигового регистра.
Сигнал с расширенным спектром подается антенной 2 на приемник 4. Приемник 4 понижает частоту сигнала и подает сигнал на сжимающий элемент 6. Сжимающий элемент 6 перемножает принятый сигнал с ПШ кодом, генерируемым ПШ генератором 20. Вследствие сходства ПШ кодов со случайным шумом произведение ПШ кода и принятого сигнала должно быть практически равно нулю, за исключением точки синхронизации.
Однако из-за отсутствия синхронизации на уровне элемента сигнала и из-за внесенного шума это не имеет места, что дает возрастание числа ситуации ложной тревоги, когда подвижная станция может считать, что она успешно захватила пилот-сигнал, а на самом деле этого нет. Для того чтобы придать большую определенность заданному условию успешного захвата, проверка повторяется несколько раз. Количество повторов проверки определяется контроллером 18 поискового устройства. Контроллер 16 поискового устройства может выполняться аппаратно с использованием микропроцессора или микроконтроллера, либо в противоположность этому программно.
Контроллер 18 поискового устройства подает гипотезу смещения на ПШ генератор 20. В примерном выполнении принятый сигнал промодулирован квадратурной фазовой манипуляцией (КФМн) (QPSK), так что ПШ генератор подает на сжимающий элемент 6 ПШ последовательность для составляющей синфазной (I) модуляции и отдельную последовательность для составляющей квадратурной (Q) модуляции. Сжимающий элемент 6 перемножает ПШ последовательность с соответствующей ей составляющей модуляции и выдает два произведения выходных составляющих в когерентные накопители 8 и 10.
Когерентные накопители 8 и 10 суммируют произведение по длине последовательности произведения. Когерентные накопители 8 и 10 реагируют на сигналы с контроллера 18 поискового устройства для обнуления, фиксации и установки периода суммирования. Суммы произведений подаются с сумматоров 8 и 10 на квадратор 12. Квадратор 12 возводит в квадрат каждую из сумм и складывает квадраты между собой.
Сумма квадратов подается квадратором 12 на некогерентный сумматор 14. Некогерентный сумматор 14 определяет значение энергии с выхода квадратора 12. Некогерентный сумматор 14 служит для противодействия эффектам расхождения по частоте между передаваемыми тактовыми сигналами базовой станции и принимаемым тактовым сигналом подвижной станции и помогает в статистике обнаружений в среде с замираниями, если известно, что частота двух тактовых сигналов одна и та же и что глубоких замираний нет, то идеальным подходом будет проинтегрировать последовательность на всем периоде накопления в виде:
где PNI(n) и PNQ(n) могут равняться ±1.
Если, однако, имеется вероятность частотного рассогласования или замираний, то коррелятор жертвует частью статистики обнаружения для того, чтобы получить более робастный метод корреляции вида: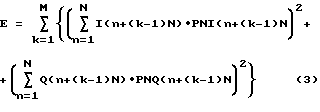
Контроллер 18 поискового устройства подает значение М на некогерентный накопитель 14.
Некогерентный накопитель 14 подает сигнал энергии на средство 16 сравнения. Средство 16 сравнения сравнивает значение энергии с заранее заданным порогом, поданным контроллером 18 поискового устройства. Результаты каждого сравнения подаются затем обратно на контроллер 18 поискового устройства. Контроллер 18 поискового устройства проверяет сравнения и определяет, содержит ли окно вероятных кандидатов для правильного смещения, тогда окно просматривается вновь в соответствии со способом, используемым в масштабируемом окне.
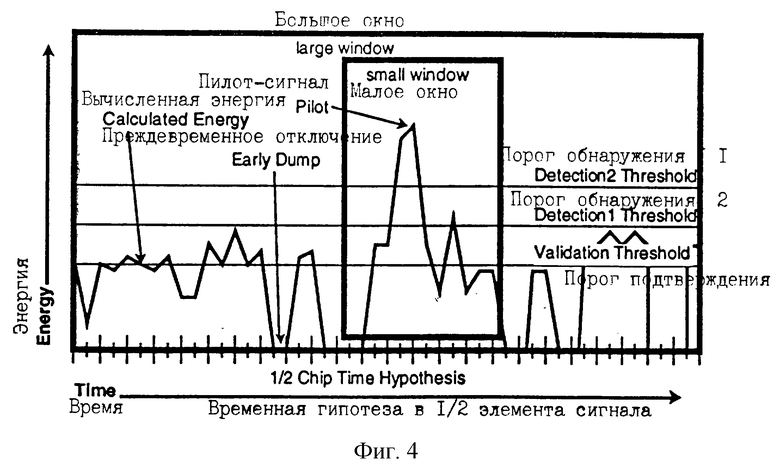
Чтобы проиллюстрировать выгоды от использования метода масштабируемого окна, приводится пример способа, использующего фиксированный размер окна. Фиг.2 представляет график развертки значений энергии по гипотезам временного положения элемента сигнала. В примерном выполнении окно содержит 56 гипотез положения элемента сигнала. Окно представляет использование проверки с двухуровневым порогом. Отмеченные пороги являются порогом обнаружения и порогом подтверждения.
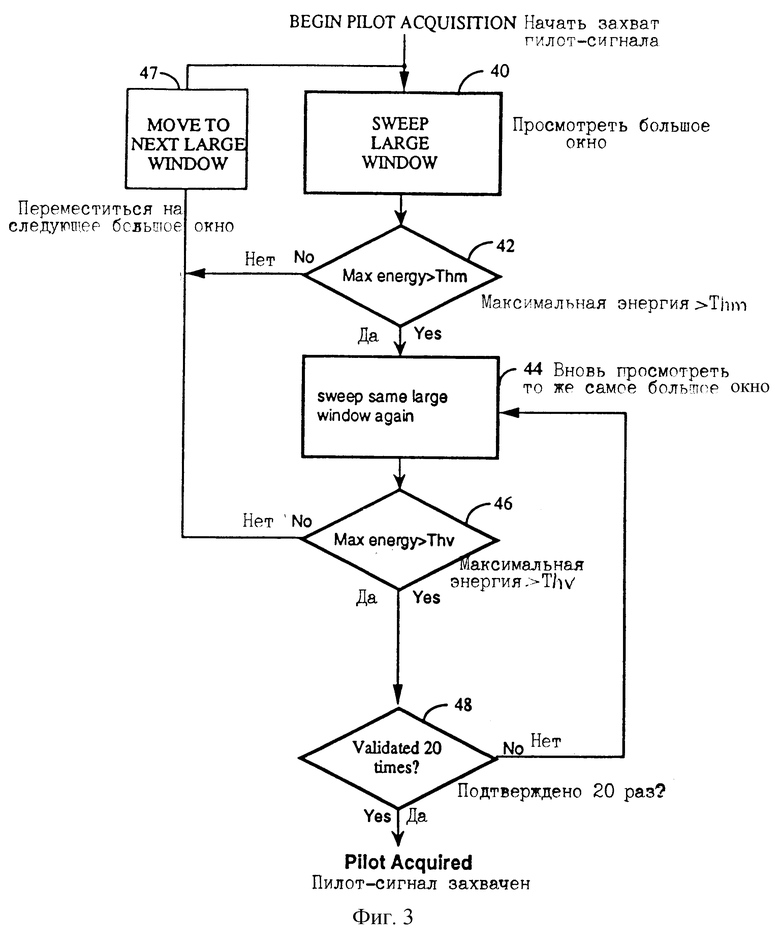
Фиг. 3 представляет обычный способ, используемый для просмотра окон с фиксированным числом гипотез. Блок-схема алгоритма начинается в блоке 40, где выполняется описанная для фиг.1 операция для выдачи результатов сравнения, указанных на фиг.2. Если окно "просмотрено" и никакая энергия гипотезы не превышает порога обнаружения (ТНМ) блок 42, то контроллер 18 поискового устройства начнет просмотр следующего окна - блок 47 и блок 40.
Однако если на рассчитанной кривой энергии имеются точки, которые превышают порог обнаружения (ТНМ), то алгоритм переходит к стадии подтверждения в блоке 44. В блоке 44 то же самое большое окно просматривается снова и в это время рассчитанная энергия сравнивается с более низким пороговым значением - порогом подтверждения (THV). Если в блоке 42 обнаруженная максимальная энергия не превышает этот порог, то в блоках 47 и 40 просматривается следующее большое окно. Затем алгоритм переходит к блоку 48, который определяет, произошло ли подтверждение для двадцати следующих друг за другом окон. Если проведено меньше, чем N проверок подтверждения, где N для примера равно двадцати, то алгоритм переходит в блок 44, и большое окно просматривается вновь. Однако после N следующих друг за другом успешных проверок подтверждения определяется, что пилот-сигнал захвачен.
Обратимся теперь к фиг.4, на которой представлена кривая рассчитанной энергии и иллюстрируется использование масштабируемого окна по настоящему изобретению. Когда обнаружен пик, контроллер поискового устройства укрупняет масштаб на этом пике и проверяет гипотезы в меньшем наборе вблизи гипотезы, которая дала подъем к обнаруженному пику.
На фиг.5 представлена блок-схема алгоритма способа, по которому работает поисковое устройство по настоящему изобретению. В усовершенствованном способе по настоящему изобретению используется метод трехступенчатого вхождения. В блоке 80 просматривается большое окно. Контроллер 18 поискового устройства поверяет результаты сравнения для определения, имеется ли пик больше, чем порог обнаружения (ТНМ). Если не обнаружено пика выше, чем ТНМ, то алгоритм возвращается к блоку 80, и просматривается новое окно.
Когда в большом окне находится пик больше, чем ТНМ, то алгоритм переходит к блоку 84. В это время выполняется только просмотр в меньшем наборе гипотез вокруг обнаруженного пика. Этот меньший набор гипотез представлен на фиг. 4 как малое окно. Использование малого окна для второй проверки предназначено для снижения времени вхождения путем значительного снижения времени для проверки на ложную тревогу, т.е. состояние, в котором подвижный блок уверен, что он вошел в фазу, тогда как на деле этого нет. Время, которое тратится на выполнение этой второй проверки, снижается пропорционально отношению между числом гипотез в меньшем окне и числом гипотез в большем окне. Для того, чтобы иметь лучшую рабочую характеристику, над данными от этого малооконного поиска выполняются некогерентные накопления.
Затем в блоке 86, если имеет место энергия больше, чем порог обнаружения 2 (ТНМ2), поиск входит в стадию подтверждения. Если не находится энергии больше, чем порог ТНМ2, то алгоритм возвращается к блоку 80 и осуществляется поиск в новом большом окне.
Если же в блоке 86 определено, что имеется рассчитанное значение энергии больше, чем порог 2 (ТНМ2), то алгоритм переходит к блоку 88. Имеются три условия, при которых останавливается подтверждение: (1) неудачный просмотр Vf раз подряд, (2) оценка частоты дважды дает одно и то же значение при переходе от одного 100-миллисекундного отсчета к следующему, или (3) определено, что пилот-сигнал захвачен. При подтверждении сигнал на пике демодулируется. В блоке 88 принятый сигнал демодулируется в соответствии с гипотезой пика. Результаты демодулированного сигнала анализируются для определения, зафиксированы ли они, и если да, то вхождение выполнено. Если демодулированные результаты указывают, что сигнал не зафиксирован, алгоритм переходит к блоку 92.
В блоке 92 рассчитанные значения энергии для малого окна сравниваются с пороговым значением подтверждения (THV). Если в блоке 92 в малом окне имеют место рассчитанные значения энергии, которые превышают порог подтверждения, то алгоритм переходит к блоку 94, где переменная счета устанавливается на нуль, а затем алгоритм переходит назад к блоку 88 и повторяется, как описано ранее.
Если в блоке 92 в малом окне нет рассчитанных значений энергии, которые превышают порог, то алгоритм переходит к блоку 96, где переменная счета увеличивается на 1, а затем алгоритм возвращается к блоку 98, который проверяет, не является ли неудачной дважды подряд проверка подтверждения. Если проверка подтверждения неудачна Vf раз подряд, алгоритм переходит к блоку 80, и просматривается новое большое окно. Если проверка подтверждения удачна дважды подряд, то алгоритм переходит к блоку 88, и работа продолжается, как описано ранее.
Приведенное описание предпочтительных выполнений предназначено для того, чтобы дать возможность любому специалисту сделать или использовать настоящее изобретение. Различные видоизменения этих выполнений будут сразу ясны специалистам, а определенные здесь исходные принципы могут быть применены к другим выполнениям без использования изобретательства. Таким образом, настоящее изобретение не направлено на ограничение показанными здесь выполнениями, но согласуется с самым широким объемом, соотносимым с рассмотренными здесь принципами и новыми признаками.


Изобретение относится к связи с расширенным спектром и касается способа и устройства для выполнения поискового вхождения в системе связи с расширенным спектром. В способе осуществляется просмотр большого окна гипотез смещения на элемент псевдошумового (ПШ) сигнала, причем гипотезы смещения генерируются генератором ПШ последовательностей под управлением контроллера поискового устройства. При этом находится энергия сжатой последовательности, которая сжимается сжимателем, и по ее нахождению определяют присутствие пилот-сигнала в пороговом устройстве, имеющем одно из смещений на элемент сигнала большого окна поиска, затем под управлением контроллера поискового устройства производится поиск поднабора гипотез смещения или малого окна. Технический результат, достигаемый при реализации изобретения, состоит в сокращении времени, необходимого для поискового вхождения в связь в подвижной системе связи. 3 с. и 17 з.п.ф-лы, 5 ил.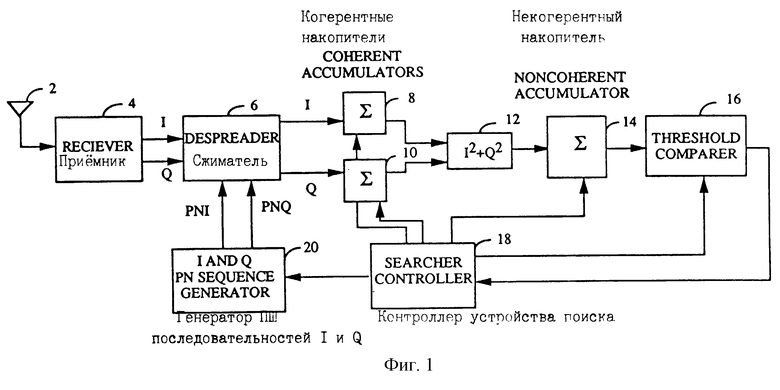
| US 5177765 А, 05.01.1993 | |||
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ С КОДОВЫМ УПЛОТНЕНИЕМ СИГНАЛОВ | 1991 |
|
RU2014738C1 |
| US 5103459 А, 07.04.1992 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| US 5036109 А, 08.10.1991. | |||

