Изобретение относится к сотовым системам связи, содержащим множество базовых станций, каждая из которых в широковещательном режиме передает характерный контрольный сигнал. В частности, настоящее изобретение относится к новому усовершенствованному способу поиска и выявления контрольных сигналов тех базовых станций, от которых принимается сигнал с уровнем мощности, достаточным для поддержания связи.
Описание уровня техники
В обычных сотовых телефонных системах выделенный диапазон частот разбивается на каналы, ширина которых при использовании аналоговой частотной модуляции составляет 30 кГц. Область обслуживания системы территориально разделяется на ячейки разной величины. Доступные частотные каналы разделяются на наборы, причем каждый набор обычно содержит одинаковое число каналов. Частотные каналы назначаются ячейкам таким образом, чтобы минимизировать вероятность возникновения взаимных помех между каналами. Например, если в системе имеется семь частотных каналов и ячейки представляют собой равновеликие шестиугольники, набор частот, используемый в данной ячейке, не должен использоваться в шести ближайших или соседних окружающих ячейках. Более того, набор частот одной из ячеек не должен использоваться в следующих двенадцати ближайших ячейках.
Применяемая в обычных сотовых телефонных системах схема передачи связи обеспечивает непрерывность телефонной связи при перемещении абонента через границу между двумя ячейками. Переход с одной ячейки в другую ячейку инициируется после того, как приемник базовой станции ячейки, обслуживающей телефонный вызов, устанавливает, что уровень сигнала, принимаемого с мобильного телефона, падает ниже заданного порогового значения. Низкий уровень принимаемого сигнала означает, что мобильный телефон находится вблизи границы ячейки. После того, как уровень сигнала падает ниже заданного порогового значения, базовая станция выдает запрос в контроллер системы для определения того, принимает ли соседняя базовая станция сигнал с мобильного телефона, уровень которого выше уровня сигнала, принимаемого данной текущей станцией.
В сотовых телефонных системах множественного доступа с кодовым разделением (МДКР) каналов общий частотный диапазон используется для осуществления связи со всеми базовыми станциями. Общий частотный диапазон позволяет поддерживать одновременную связь между мобильной станцией и несколькими базовыми станциями. Дискриминация сигналов, занимающих общий частотный диапазон, в приемной станции осуществляется с использованием свойств сигналов системы МДКР с расширенным спектром, использующей высокоскоростной псевдошумовой (ПШ) код. Высокоскоростной ПШ-код используется для модуляции сигналов, передаваемых базовыми станциями и мобильными станциями. Передающие станции, использующие разные ПШ-коды или ПШ-коды, смещенные во времени, формируют сигналы, которые могут быть раздельно приняты приемной станцией. Модуляция высокоскоростным ПШ-кодом позволяет также приемной станции принимать сигналы от одной передающей станции в условиях, когда сигнал распространяется несколькими различными путями.
Общий частотный диапазон, используемый в сотовой системе связи с МДКР, позволяет мобильной станции поддерживать связь с несколькими базовыми станциями во время процедуры передачи связи. В этих условиях связь между мобильной станцией и другим пользователем не прерывается при возможном переходе от базовой станции, соответствующей ячейке, которую мобильная станция покидает, к базовой станции, соответствующей ячейке, в которую мобильная станция входит. Такой тип перехода может быть рассмотрен в качестве "гибкой" передачи связи с мобильным абонентом от одной базовой станции к другой, при которой две или более базовые станции или секторы базовых станций одновременно передают сигналы мобильной станции. Аналогичным образом осуществляется переход от сектора одной ячейки к другой ячейке, а также переход между секторами базовой станции одной ячейки в случае ячейки, разбитой на секторы.
Обычно различение базовых станций или так называемую процедуру "мягкого перехода" начинает контроллер сотовой системы, который назначает телефонному вызову модем, находящийся в новой базовой станции. Этому модему присваивается ПШ-адрес, связанный с телефонным звонком между мобильной станцией и модемом текущей базовой станции. Модем новой базовой станции, выделенный для обслуживания телефонного вызова, осуществляет поиск и отыскивает сигнал, передаваемый мобильной станцией. Модем новой базовой станции также начинает передавать на мобильную станцию сигнал прямой линии связи. Блок поиска мобильной станции отыскивает этот сигнал прямой линии на основе сигнальной информации, передаваемой старой базовой станцией. После того, как мобильная станция получит сигнал, передаваемый модемом новой базовой станции, мобильная станция может продолжать поддерживать связь через две базовые станции. Другая базовая станция может быть добавлена тем же способом, что и приведенная выше первая базовая станция. В этом случае мобильная станция может продолжать поддерживать связь через три базовые станции. Эта процедура может продолжаться до тех пор, пока мобильная станция не установит связь с одной базовой станцией для каждого элемента демодуляции в составе мобильной станции.
Благодаря тому, что при выполнении гибкой передачи связи мобильная станция в каждый момент времени поддерживает связь хотя бы с одной базовой станцией, связь между мобильной станцией и пользователем не прерывается. Таким образом, гибкая передача связи имеет существенные преимущества, основанные на принципе "установить связь до прерывания связи" в отличие от обычного принципа "прерывание связи до ее установления", используемого в других сотовых системах связи.
В сотовой телефонной системе с МДКР, раскрытой в патенте США N 5267261 на "Гибкую передачу связи с мобильной станцией в сотовой системе связи с МДКР", описан способ осуществления гибкой передачи связи вышеописанного типа. Этот способ применим для систем, в которых каждая базовая станция передает опорный пилот-сигнал с расширенным спектром. Эти пилот-сигналы выдаются мобильными станциями для обеспечения начальной синхронизации системы и для устойчивого слежения за сигналами, передаваемыми базовой станцией, по времени, частоте и фазе. Пилот-сигналы, передаваемые каждой базовой станцией системы, могут использовать один и тот же ПШ-код, но с разным сдвигом по фазе, означающим, что ПШ-коды, передаваемые соседними базовыми станциями, является идентичными, но сдвинутыми относительно друг друга во времени. Сдвиг по фазе позволяет различать пилот-сигналы друг от друга в соответствии с тем, с какой базовой станции передается тот или иной сигнал.
В соответствии с патентом США N 5276261 на мобильной станции поддерживаются несколько перечней базовых станций, для которых уровень принимаемого сигнала достигает предварительно определенные уровни. Процедура поиска пилот-сигналов базовой станции может быть ускорена путем определения четырех различных наборов для смещений пилот-сигналов: "Активный набор", "Набор кандидатур", "Набор соседей" и "Остаточный набор". "Активный набор" указывает базовую станцию (станции) или сектор (секторы), через которые мобильная станция поддерживает связь. "Набор кандидатур" указывает базовую станцию (станции) или сектор (секторы), для которых уровень пилот-сигналов, принимаемых мобильной станцией, имеет значение, достаточное для того, чтобы занести их в "Активный набор", но которые не внесены в "Активный набор" базовых станций. "Набор соседей" указывает базовую станцию (станции) или сектор (секторы), которые являются вероятными кандидатами на установление связи с мобильной станцией. "Остаточный набор" указывает базовую станцию (станции) или сектор (секторы) со всеми другими смещениями пилот-сигналов, возможными в данной системе, исключая смещения пилот-сигналов, учтенные в "Активном наборе", "Наборе кандидатур" и "Наборе соседей".
После инициирования вызова мобильная станция продолжает опрашивать пилот-сигналы, передаваемые находящимися в соседних ячейках базовыми станциями. Опрос пилот-сигналов продолжается для определения того, превысил ли уровень пилот-сигнала одной или нескольких соседних станций предварительно определенное пороговое значение, величина которого свидетельствует о том, что между базовой станцией и мобильной станцией может быть установлена связь. Как только уровень пилот-сигнала находящейся в соседней ячейке базовой станции превысит пороговое значение, то это служит для мобильной станции сигналом того, что необходимо начинать процедуру передачи связи. В соответствии с результатами определения интенсивности принимаемых пилот-сигналов мобильная станция формирует и передает управляющее сообщение на базовую станцию, осуществляющую текущее обслуживание вызова. Это управляющее сообщение далее передается в контроллер системы, который, исходя из доступных ресурсов системы, определяет следует ли начинать процедуру передачи связи.
В описанной выше системе с МДКР, соответствующей патенту США N 5267261, процедура помещения элементов "Набора соседей" выполняется следующим образом. Пилот-сигнал с базовой станции прежде всего сравнивается с предварительно определенным пороговым значением. Как только мобильная станция устанавливает, что измеренное значение превысило ранее определенный порог, управляющий процессор мобильной станции формирует и передает соответствующее сообщение о результатах измерения уровня пилот-сигнала. Это сообщение принимается базовой станцией, с которой в данный момент связана мобильная станция, и пересылается в контроллер системы.
Решение о помещении элемента "Набора кандидатур" в "Активный набор" принимается контроллером системы. Например, если измеренный пилот-сигнал базовой станции-кандидата имеет уровень, превышающий уровень какого-либо сигнала из "Активного набора", то он может быть присоединен к "Активному набору". В варианте системы на число элементов "Активного набора" наложено ограничение. Если добавление пилот-сигнала к "Активному набору" превысит установленный предел, то наиболее слабый сигнал может быть перемещен из "Активного набора" в другой набор.
К несчастью, существующие способы измерения уровня пилот-сигнала имеют тенденцию к ошибочному отнесению пилот-сигналов с недостаточно высоким уровнем к числу сигналов, уровень которых превышает установленный порог для элементов "Набора кандидатур". Такие ошибочные замеры уровня пилот-сигнала могут привести к "ложным тревогам", при которых элементы "Набора соседей" ошибочно добавляются в "Набор кандидатур". Это ошибочное добавление, в свою очередь, может привести к ошибочной процедуре передачи связи, т.е. к передаче вызова базовой станции, которая не в состоянии поддерживать связь с мобильным устройством.
Соответственно, задачей настоящего изобретения является создание усовершенствованного способа поиска и выявления только тех пилот-сигналов, которые передаются базовыми станциями, являющимися действительными кандидатами на передачу им связи с мобильной станции.
Сущность изобретения
Настоящее изобретение обеспечивает новые усовершенствованные способ и устройство для выполнения операции поиска пилот-сигнала в ожидании перевода связи мобильной связи с одной базовой станции на другую. В данной заявке изобретение раскрывается на примере варианта реализации, представляющего собой сотовую систему связи, в которой реализован множественный доступ к кодовым разделениям (МДКР). В такой системе каждая базовая станция передает пилот-сигнал с общим ПШ-кодом расширения спектра, смещенным по фазе кода относительно пилот-сигналов других базовых станций. При осуществлении связи с мобильной станцией на мобильной станции создается перечень смещений ПШ-кодов, соответствующих базовым станциям соседних ячеек. Кроме того, не мобильную станцию передается сообщение, которое указывает по крайней мере один пилот-сигнал, соответствующий базовой станции, через которую мобильная станция поддерживает связь. Эти перечни хранятся в мобильной станции в виде таких списков пилот-сигналов, как "Набор соседей" и "Активный набор". В добавок к "Набору соседей" и "Активному набору" мобильная станция поддерживает для пилот-сигналов "Набор кандидатур" и "Набор предварительных кандидатур". На основе анализа пилот-сигналов, принимаемых мобильной станцией, мобильная станция осуществляет перевод записей из "Набора соседей" в "Набор предварительных кандидатур" и "Набор кандидатур", а возможно и в "Активный набор".
В одном из вариантов реализации каждая запись в "Наборе соседей" соответствует базовой станции, находящейся в определенной близости от мобильной станции. На мобильной станции для каждой базовой станции из "Набора соседей" измеряется уровень передаваемого пилот-сигнала. Измеренные уровни сигнала, соответствующие каждой базовой станции, занесенной в "Набор соседей", сравниваются с первым предварительно определенным уровнем. Одна или несколько записей из "Набора соседей", соответствующих базовым станциям с уровнем пилот-сигнала, превышающим первое предварительное определенное значение, могут быть переведены в "Набор предварительных кандидатур".
Далее оцениваются уровни пилот-сигналов, соответствующих записям в "Наборе предварительных кандидатур", для определения приемистости их помещения в "Набор кандидатур", из которого отбираются записи для введения в "Активный набор". После добавления базовой станции в "Активный набор" контроллер системы передает на дополнительно введенную базовую станцию информацию, содержащую команды установления связи с мобильной станцией. Таким образом, связь мобильной станции осуществляется через все базовые станции, пилот-сигналы которых занесены в "Активный набор" мобильной станции.
Краткое описание чертежей
Признаки, задачи и преимущества настоящего изобретения поясняются в приведенном ниже подробном описании со ссылками на чертежи, на которых одинаковыми позициями обозначены одинаковые элементы и на которых представлено следующее:
фиг. 1A - пример сотовой системы связи, в которой может быть использован способ поиска пилот-сигнала, соответствующий настоящему изобретению;
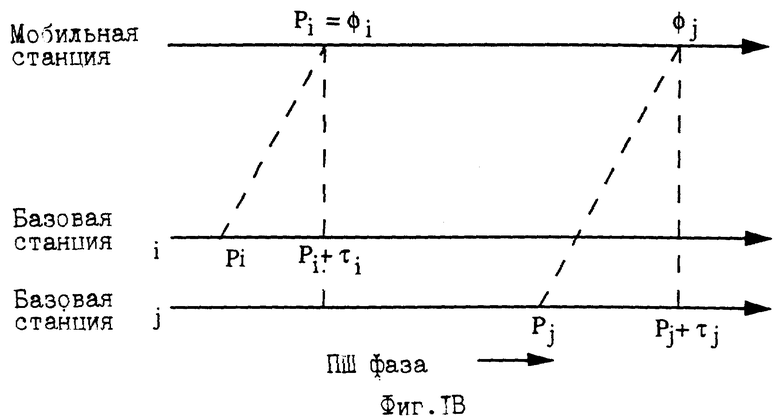
фиг. 1B - иллюстрация временных соотношений и определения смещения фазы ПШ-сигнала для пилот-сигналов нескольких базовых станций;
фиг. 2 - обобщенная блок-схема, описывающая обычный способ поиска пилот-сигнала, используемый для идентификации базовых станций и занесения их в "Набор кандидатур" мобильной станции;
фиг. 3 - обобщенное представление усовершенствованного способа поиска пилот-сигнала в соответствии с настоящим изобретением;
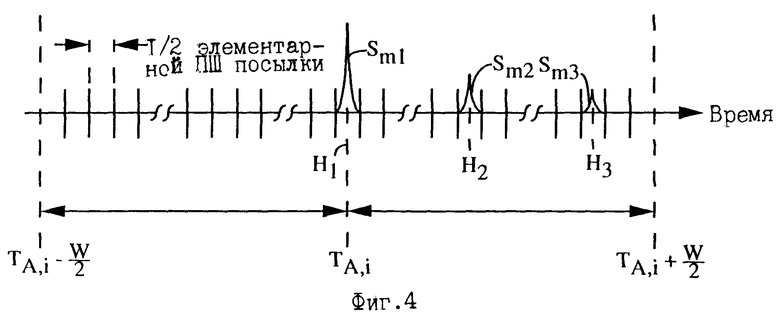
фиг. 4 - окно поиска шириной W, центр которого совпадает с ожидаемым временем приема мобильной станцией пилот-сигнала базовой станции из "Набора соседей";
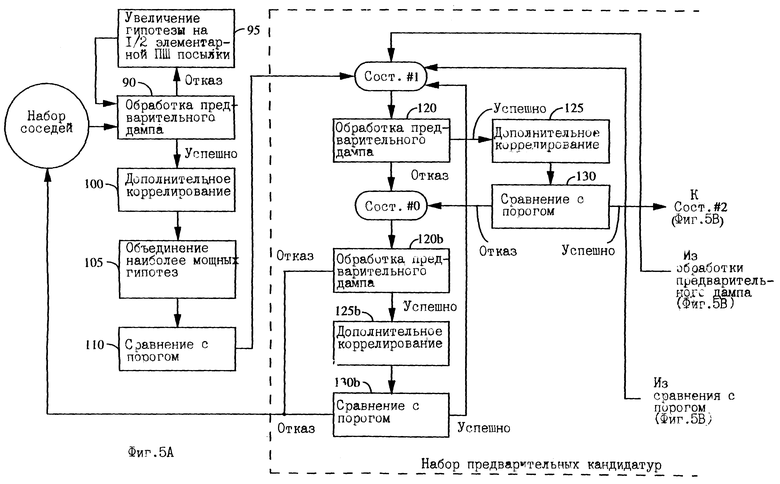
фиг. 5A и фиг. 5B - блок-схемы, описывающие новую процедуру поиска пилот-сигнала в соответствии со способом, соответствующим изобретению;
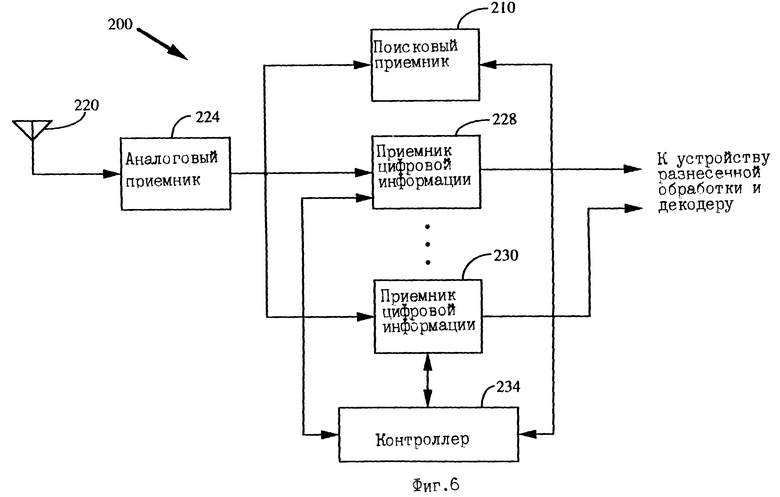
фиг. 6 - пример осуществления приемника мобильной станции, в котором может быть использовано устройство поиска пилот-сигнала, соответствующее настоящему изобретению;
фиг. 7 - структурная схема поискового приемника для осуществления способа поиска пилот-сигнала, соответствующего настоящему изобретению.
Предпочтительные варианты осуществления изобретения
В сотовых системах связи с МДКР один и тот же частотный диапазон может быть использован для всех ячеек. Свойства сигналов системы с МДКР, которые обеспечивают выигрыш при обработке, используются также для различения сигналов, занимающих один и тот же частотный диапазон. Мобильная станция или, в случае ближней связи, телефон, размещенный на средстве передвижения, портативный телефон или телефонная трубка персональной системы связи не требуют переключения частот при переводе связи от одной базовой станции к другой. Кроме того, существенно снижается вероятность того, что при ошибочном приеме сигнала передачи связи нарушится непрерывность связи.
В сотовой системе связи с МДКР каждая базовая станция содержит несколько станций модуляции-демодуляции или модемов с расширенным спектром. Каждый модем состоит из передающего модулятора цифровых сигналов с расширенным спектром, по крайней мере одного приемника цифровых сигналов с расширенным спектром и поискового приемника. Каждый модем базовой станции назначается мобильному терминалу при необходимости организации связи с назначенным мобильным терминалом. Следовательно, в большинстве случаев часть модемов является доступной для использования, а оставшаяся часть находится в "активном" состоянии, поддерживая связь с соответствующими мобильными терминалами.
При осуществлении "гибкого" перехода от одной базовой станции к другой в сотовой системе связи с МДКР, такой как сотовая телефонная система с МДКР, частная АТС с выходом в общую сеть или персональная система связи, модем новой базовой станции назначается мобильному терминалу, в то время как связь продолжает обслуживать прежняя базовая станция. После того, как мобильный терминал переместится в промежуточную область между двумя базовыми станциями, связь может обеспечиваться разными базовыми станциями, как того будет требовать уровень сигнала. Благодаря тому, что мобильный терминал постоянно осуществляет связь по крайней мере через одну базовую станцию, то нарушений в непрерывности связи или в выполнении услуг связи для мобильного терминала не произойдет. Ясно, что рассмотренные здесь особенности выполнения перевода связи от одной базовой станции к другой могут быть также использованы для перевода связи между секторами в ячейках, разбитых на секторы.
Прежняя базовая станция перестает обслуживать вызов после того, как мобильная станция войдет в устойчивую связь с новой базовой станцией, например, когда мобильная станция окажется на территории новой ячейки. В результате "гибкая" передача связи заключается в выполнении коммутационной функции путем установления связи до прерывания связи. В отличие от этого обычные сотовые телефонные системы связи реализуют указанную функцию путем прерывания связи, а затем ее установления.
В настоящем изобретении осуществляется способ поиска пилот-сигнала, который сокращает вероятность ложных тревог, обусловленных ошибочными измерения мобильной станцией уровня пилот-сигнала базовой станции. В частности, если пилот-сигналы ошибочно отнесены к сигналам, уровень которых превышает предварительно определенный порог перевода связи, то может произойти ошибочный перевод связи на базовую станцию, с которой принят пилот-сигнал, уровень которого по результатам измерений оказался превышающим упомянутый порог перевода связи, но в действительности меньше этого порога. Такой ошибочный перевод связи соответствует ситуации, в которой вызов передан на базовую станцию, не способную установить связь с мобильной станцией.
Хотя в предпочтительном варианте мобильный терминал инициирует запрос на перевод связи и определяет новую базовую станцию, однако решение на перевод связи может быть выполнено так, как это делается в обычной сотовой телефонной системе. Как было показано выше применительно к обычным системам, базовая станция определяет, когда необходимо выполнить перевод связи, а затем через контроллер системы посылает запрос в соседние ячейки о поиске сигнала мобильного терминала. После этого обслуживание вызова передается базовой станции, которая, по оценке контроллера системы, принимает наиболее мощный сигнал.
Вышеупомянутый пилот-сигнал может быть определен как передача с данной базовой станции несущей пилот-сигнала в соответствующем канале пилот-сигнала. Пилот-сигнал является немодулированным сигналом с расширенным спектром в виде прямой последовательности, передаваемым постоянно всеми базовыми станциями с использованием общего псевдослучайного шумового (ПШ) расширяющего кода. Пилот-сигнал позволяет обеспечить начальную синхронизацию мобильной станции в системе, т. е. тактовую синхронизацию, в дополнение к тому, что пилот-сигнал обеспечивает опорную фазу, необходимую для когерентной демодуляции, и опорное значение для интенсивности сигнала, необходимое для сравнения станций при выявлении необходимости перевода связи.
Передаваемый каждой базовой станцией пилот-сигнал представляет собой один и тот же ПШ-код расширения спектра, но с разным смещением фазы кода. Например, в настоящем изобретении код расширения спектра пилот-сигнала представляет собой ПШ-код длиной 215. В этом примере имеют место 511 различных смещений относительно нулевого смещения, причем смещения осуществляются приращениями на 64 элементах ПШ-кода. Благодаря этим смещениям по фазе пилот-сигналы можно отличать друг от друга в мобильной станции и в результате различать базовые станции, с которых эти сигналы передаются. Использование единого кода пилот-сигнала позволяет мобильной станции входить в тактовую синхронизацию в системе за один поиск по всем фазам кода пилот-сигнала. При этом путем интегрирования по каждой фазе кода легко определяется наиболее мощный пилот-сигнал. Выявленный пилот-сигнал в общем случае соответствует пилот-сигналу, передаваемому ближайшей базовой станцией.
Пример реализации сотовой телефонной системы в альтернативном варианте представляет собой частную АТС с выходом в общую сеть (РВХ) или персональную систему связи (PCS), в которой предложенный в изобретении способ поиска пилот-сигнала может быть использован так, как это показано на фиг. 1A. В системе, показанной на фиг. 1A, для связи между мобильными станциями системы или мобильными телефонами и базовыми станциями используется принцип МДКР. Сотовые системы в больших городах могут иметь сотни базовых станций, обслуживающих сотни тысяч мобильных телефонов. Использование принципа МДКР значительно облегчает увеличение пропускной способности систем таких размеров по сравнению с обычными сотовыми системами, использующими частотно-модулированные сигналы.
На фиг. 1A контроллер системы и коммутатор 10, называемый также станцией коммутации мобильных телефонов, обычно содержит интерфейс и аппаратуру обработки, предназначенные для управления базовыми станциями в системе. Контроллер 10 также управляет маршрутизацией телефонного вызова от телефонной сети общего пользования до соответствующей базовой станции, осуществляющей передачу на необходимую мобильную станцию. Контроллер 10 обеспечивает также маршрутизацию вызовов от мобильных станций по крайней мере через одну базовую станцию в телефонную сеть общего пользования. Контроллер 10 может направлять вызовы между мобильными пользователями через подходящую базовую станцию (станции), так как мобильные станции обычно не связываются непосредственно друг с другом.
Контроллер 10 может быть подключен к базовым станциям при помощи различных средств, таких как выделенные телефонные линии, оптико-волокнистые линии или микроволновые линии связи. На фиг. 1A показаны три такие базовые станции 12, 14 и 16 вместе с мобильной станцией 18, на которой установлен сотовый телефон. Стрелками 20a-20b показаны возможные линии связи между базовой станцией 12 и мобильной станцией 18. Стрелками 22a-22b показаны возможные линии связи между базовой станцией 14 и мобильной станцией 18. Соответственно, стрелками 24a-24b показаны возможные линии связи между базовой станцией 16 и мобильной станцией 18.
Области обслуживания базовой станции или ячейки формируются в виде географических районов таким образом, что мобильная станция обычно будет находиться ближе к оной базовой станции. Когда мобильная станция находится в режиме ожидания, т. е. нет телефонных вызовов, мобильная станция постоянно контролирует пилот-сигналы, передаваемые со всех ближайших базовых станций. Как показано на фиг. 1A, пилот-сигналы передаются на мобильную станцию 18 с базовых станций 12, 14, и 16 соответственно по линиям связи 20b, 22b и 24b. После этого мобильная станция определяет, в какой ячейке она находится, путем сравнения уровней пилот-сигналов, передаваемых этими отдельными базовыми станциями.
На примере, показанном на фиг. 1A, ближайшей к мобильной станции 18 может считаться базовая станция 16. При инициировании мобильной станцией 18 телефонного вызова на ближайшую базовую станцию, т.е. базовую станцию 16, передается управляющее сообщение. Базовая станция 16 после приема сообщения запроса вызова сигнализирует об этом контроллеру 10 системы и пересылает номер вызова. Затем контроллер 10 системы осуществляет коммутацию телефонного вызова через телефонную сеть общего пользования к нужному абоненту.
При необходимости инициирования вызова телефонной сети общего пользования контроллер 10 передает информацию о вызове на все базовые станции данного района. В ответ на это базовые станции передают пейджинговые сообщения на вызываемую мобильную станцию. Мобильная станция после прослушивания пейджингового сообщения выдает на ближайшую станцию ответное управляющее сообщение. Это управляющее сообщение сигнализирует базовой станции о том, что эта конкретная базовая станция установила связь с мобильной станцией. После этого контроллер 10 осуществляет маршрутизацию вызова через базовую станцию на мобильную станцию.
Если мобильной станции 18 необходимо покинуть район обслуживания первоначальной базовой станции, т.е. базовой станции 16, то осуществляется попытка продолжить телефонный звонок путем маршрутизации вызова через другую базовую станцию. При выполнении процедуры перевода связи существуют два различных способа инициирования процедуры перевода связи или маршрутизации через другую базовую станцию.
Первый способ, называемый передачей связи, инициированной базовой станцией, аналогичен способу перевода связи, применяющемуся в используемых в настоящее время аналоговых сотовых телефонных системах первого поколения. В способе передачи связи, инициированной базовой станцией, исходная базовая станция, т. е. базовая станция 16, фиксирует, что уровень передаваемого мобильной станцией 18 сигнала упал ниже допустимого предела. После этого базовая станция 16 передает в контроллер 10 системы запрос на передачу связи. Контроллер 10 ретранслирует запрос на все базовые станции 14 и 12, соседние с базовой станцией 16. Ретранслированный контроллером запрос содержит информацию о канале, включая последовательность ПШ-кода, используемую мобильной станцией 18. Базовые станции 12 и 14 настраивают приемники на канал, используемый мобильной станцией, и измеряют уровень сигнала, обычно, с использованием цифровых методов. Если одна из базовых станций 12 или 14 сообщает о том, что уровень принимаемого ею сигнала превышает уровень сигнала, принимаемого исходной базовой станцией, то вызов передается на эту базовую станцию.
Второй способ передачи связи называется передачей связи инициированной мобильной станцией. Мобильная станция имеет поисковый приемник, который, помимо иных функций, используется также для опроса пилот-сигналов, передаваемых соседними базовыми станциями 12 и 14. Если обнаруживается, что пилот-сигнал базовой станции 12 или 14 превышает на величину предварительно определенного порога пилот-сигнала базовой станции 16, то мобильная станция 18 передает сообщение на текущую базовую станцию, т.е. базовую станцию 16. В результате выполнения интерактивной процедуры между мобильной станцией и базовой станцией обеспечивается связь мобильной станции через одну или несколько базовых станций 12, 14 и 16.
Способ передачи связи, инициированной мобильной станцией, имеет ряд преимуществ перед способом передачи связи, инициированной базовой станцией. Мобильная станция определяет изменения маршрутов между ней и различными соседними базовыми станциями намного быстрее, чем это могут сделать базовые станции. Однако для выполнения передачи связи, инициированной мобильной станцией, каждая мобильная станция должна быть оснащена поисковым приемником, обеспечивающим опрос пилот-сигналов. В то же время, в описанном здесь варианте реализации мобильной станции, работающей в режиме МДКР, на поисковый приемник возлагаются дополнительные функции, также требующие его наличия на мобильной станции.
Передача связи, инициируемая мобильной станцией, основывается на выявлении ею наличия или отсутствия пилот-сигналов, а также определении уровня мощности пилот-сигналов. Мобильная станция идентифицирует и измеряет уровень сигнала принимаемых пилот-сигналов. Эта информация через базовую станцию (станции), с которыми связана мобильная станция, передается на станцию коммутации мобильных телефонов, которая при получении этой информации начинает или отменяет процедуру гибкой передачи связи. Для ускорения процедуры поиска пилот-сигналов определяются четыре различных набора смещений пилот-сигналов: "Активный набор", "Набор кандидатур", "Набор соседей" и "Остаточный набор". "Активный набор" определяет базовую станцию (станции) или сектор (секторы), через которые мобильная станция поддерживает связь. "Набор кандидатур" определяет базовую станцию (станции) или сектор (секторы), для которых уровень пилот-сигналов, принимаемых мобильной станцией, имеет значение, достаточное для того, чтобы занести их в "Активный набор", но которые не внесены в "Активный набор" базовых станций. "Набор соседей" определяет базовую станцию (станции) или сектор (секторы), которые являются вероятными кандидатами на установление связи с мобильной станцией. "Остаточный набор " определяет базовую станцию (станции) или сектор (секторы) со всеми другими смещениями пилот-сигналов, возможными в данной системе, исключая смещения пилот-сигналов, учтенных в "Активном наборе", "Наборе кандидатур" и "Соседнем наборе".
Пока мобильная станция связана с базовой станцией в режиме канала радиообмена, поисковый приемник под управлением управляющего процессора мобильной станции систематически измеряет уровни всех пилот-сигналов в четырех наборах пилот-сигналов при текущем назначении частоты в системе с МДКР. Результаты измерений передаются в управляющий процессор мобильной станции для дальнейшего использования.
Результаты измерений посылаются на базовую станцию (станции), с которыми поддерживает связь мобильная станция. В предпочтительном варианте реализации отчет об измерениях содержит перечень пилот-сигналов и их измеренные уровни мощности. Первым пилот-сигналом в перечне является пилот-сигнал, используемый на мобильной станции для получения опорного времени. Обычно для получения опорного времени мобильной станцией используется пришедшая первой демодулированная составляющая сигнала многолучевого распространения. Мобильная станция измеряет фазу пилот-сигналов, содержащихся в перечне, относительно нулевого смещения ПШ-последовательности пилот-сигнала с использованием синхронизации, определенной из пилот-сигнала, использованного для получения опорного времени. Для каждого измеренного пилот-сигнала мобильная станция передает значение PILOT_PN_PHASE, определяемое из выражения
PILOT_PN_PHASEj = [64 • PILOT_PN_PHASEj + ti - tj] • modulo 215, (1)
где PILOT_PN_PHASEj - фаза пилот-сигнала j-й базовой станции, ti и tj - задержки распространения сигналов в одну сторону от соответствующих базовых станций и до мобильной станции, выраженные в элементах ПШ-кода.
Принцип определения опорного времени и вычисления смещения фазы ПШ пилот-сигналов других базовых станций иллюстрируется на фиг. 1B. Необходимо отметить, что синхронизация на мобильной станции смещена относительно синхронизации на базовой станции на ti элементов ПШ-кода. Требуемая фаза ПШ пилот-сигнала fj получается из фиг. 1B с учетом того, что
fj - fi = Pj + ti - [Pi + ti), (2)
с опорным временем Pi = fi, и где
Pi = 64 • PILOT_PN_PHASEi (3) и
Pj = 64 • PILOT_PN_PHASEj. (4)
Как было отмечено выше, поисковый приемник систематически контролирует интенсивность всех пилот-сигналов из четырех наборов пилот-сигналов. Скорость поиска для элементов "Активного набора" и "Набора кандидатур" предпочтительно должна быть одинаковой. Диапазон поиска (т.е. окно поиска) для всех элементов "Активного набора" и "Набора кандидатур" определяется в значениях определенного числа элементов ПШ-кода. Для каждого элемента "Активного набора" и "Набора кандидатур" окно поиска центрируется относительно принятой первой пригодной для использования составляющей сигнала многолучевого распространения. Многолучевая составляющая считается пригодной для использования, если она имеет достаточный уровень для ее демодуляции в мобильной станции.
На фиг. 2 показана обобщенная блок-схема обычного способа поиска пилот-сигнала, используемая для идентификации и внесения базовых станций в "Набор кандидатур". Рассмотрим случай с одной базовой станцией в "Активном наборе", с одной базовой станцией в "Наборе кандидатур" и с десятью базовыми станциями в "Наборе соседей". Предпочтительным является следующий порядок пилот-сигналов базовых станций в "Активном наборе" (A), "Наборе кандидатур" (K) и "Наборе соседей" (Ci):
A, K, C1; A, K, C2; ...; A, K, C10; A, K, C1, ...
Для каждого окна поиска предварительно определенной ширины, выраженной в элементах ПШ-сигнала, которое отцентрировано относительно пилот-сигнала в "Наборе соседей", принимаемый ПШ пилот-сигнал декоррелируется с использованием набора локально-генерируемых "гипотез" ПШ пилот-сигнала. В рассматриваемой системе с МДКР каждой базовой станцией передаются идентичные пилот-сигналы. Однако при передаче каждого сигнала со своим временным сдвигом оказывается возможным различение пилот-сигналов, передаваемых разными базовыми станциями. Каждая гипотеза пилот-сигнала может быть сформирована путем
(i) сдвига по фазе местного генератора последовательности ПШ пилот-сигнала на временной сдвиг, соответствующий последовательности ПШ пилот-сигнала отыскиваемой базовой станции, с тем, чтобы получить ее локально сформированную копию;
(ii) сдвига по фазе локально сформированной копии пилот-сигнала на уникальный временной сдвиг в пределах окна поиска.
При этом каждая гипотеза пилот-сигнала соответствует некоторой "оценке" времени прибытия пилот-сигнала выбранной базовой станции в пределах окна поиска.
При поиске пилот-сигнала от элемента "Набора соседей" окно поиска устанавливается вокруг ожидаемого времени прихода в мобильную станцию отыскиваемого пилот-сигнала упомянутой "соседней" базовой станции. Затем на мобильной станции формируется начальная гипотеза для пилот-сигнала элемента "Набора соседей", соответствующая приходу пилот-сигнала элемента "Набора соседей" в начале окна поиска. Вычисляется корреляция начальной гипотезы с принятым пилот-сигналом на протяжении первого выбранного числа (например, 100) элементов ПШ-сигнала, а результаты корреляционного сравнения интегрируются в пределах такого же интервала, выраженного в элементах ПШ-сигнала (шаг 50). После этого результат сравнивается (шаг 60) с заданным порогом предварительного дампа. Если результат меньше порога предварительного дампа, то значение энергии принимаемого сигнала, связанное гипотезой, устанавливается равным нулю, или, для краткости, "гипотеза устанавливается равной нулю". Если начальная гипотеза устанавливается равной нулю, то начинается поиск следующей гипотезы. Следующая гипотеза получается путем сдвига по фазе местного генератора последовательности ПШ пилот-сигнала (шаг 65) на 1/2 элемента ПШ-сигнала.
Если в результате интегрирования декоррелированной начальной гипотезы получается ненулевое значение, превышающее порог предварительного дампа, то декорреляция/интегрирование начальной гипотезы с принимаемым пилот-сигналом продолжается (шаг 68) для второго выбранного числа (например, 412) элементов ПШ- сигнала. Затем обобщенный результат первого и второго интегрирований, выполненных в пределах примерного числа, равного 512 элементам ПШ-сигнала начальной гипотезы, запоминается в контроллере мобильной станции. Такой процесс декорреляции и интегрирования затем повторяется для каждой гипотезы в пределах окна поиска.
После того, как каждая гипотеза будет проверена при помощи описанной выше процедуры декорреляции/интегрирования, значения, полученные при интегрировании трех самых эффективных гипотез, объединяются (шаг 70) в цифровом сумматоре и фильтруются (шаг 75) при помощи фильтра с бесконечным импульсным откликом (БИО). Эти три наибольших значения соответствуют энергии трех наиболее мощных многолучевых составляющих оцениваемого пилот-сигнала из "Набора соседей". В примерном варианте реализации БИО-фильтр выполняется в соответствии со следующей передаточной функцией второго порядка:
Y(n) = 0,5 • Y(n-1) + 0,5 • C3, (5)
где Y(n) - выходной сигнал БИО-фильтра,
C3 - параметр, характеризующий суммарную энергию трех наиболее мощных составляющих многолучевого пилот-сигнала, вычисляемый цифровым сумматором.
Затем отфильтрованный сигнал Y(n) с выхода БИО-фильтра сравнивается (шаг 80) с порогом для "Набора кандидатур" (T_ADD). Если Y(n) превышает T_ADD, то базовая станция, с которой был получен пилот-сигнал, добавляется в "Набор кандидатур". Если Y(n) меньше T_ADD, базовая станция остается в "Наборе соседей".
Хотя выходной сигнал БИО-фильтра Y(n) был описан как соответствующий энергии принимаемого пилот-сигнала, ясно, что сравнение с T_ADD в действительности может быть выполнено в значениях энергии принимаемого пилот-сигнала, приходящейся на один элемент ПШ-сигнала к общей спектральной принимаемой плотности (т. е. шума и сигнала). В этом случае параметр T_ADD будет соответствовать заданному минимальному уровню отношения сигнал/шум для "Набора кандидатур", с которым должно сравниваться значение сигнал/шум принимаемого пилот-сигнала.
К сожалению, обычная процедура измерения пилот-сигнала, приведенная на фиг. 2, приводит к тому, что мощность принимаемых пилот-сигналов ошибочно полагается превышающей порог T_ ADD. Относительно частое возникновение "ложных тревог" может быть частично объяснено относительно коротким интервалом ПШ-декорреляции и временем интегрирования (например, 512 элементарных отсчетов), на протяжении которых выполняется сравнение мощности принимаемого пилот-сигнала с порогом T_ADD, установленным для "Набора кандидатур". Можно предположить, что некоторое удлинение интервала декорреляции/интегрирования может снизить частоту ложных тревог, однако это приведет также к увеличению периода обнаружения, требуемого для оценки интенсивности каждого пилот-сигнала из "Набора соседей". При быстроменяющихся условиях в канале, как это часто бывает в реальных сотовых сетях связи, такое увеличение периодов определения интенсивности пилот-сигналов может ухудшить характеристики системы из-за замедления процедуры добавления подходящих базовых станций в "Набор кандидатур". Как будет описано ниже, в настоящем изобретении разработан усовершенствованный способ поиска пилот-сигнала, обеспечивающего меньшую частоту "ложных тревог" для заданного периода определения интенсивности пилот-сигнала.
На фиг. 3 показано обобщенное представление усовершенствованного способа поиска пилот-сигнала в соответствии с настоящим изобретением. Представленный в изобретении способ поиска пилот-сигнала предполагает создание переходной категории базовых станций, названной "Набор предварительных кандидатур", в который базовые станции назначаются из "Набора соседей". В предпочтительном варианте реализации "Набор предварительных кандидатур" включает набор из N "Состояний предварительных кандидатур" (т.е. "Состояние #0", "Состояние #1", . . . , "Состояние #N"), который может рассматриваться как марковская цепь "Состояний предварительных кандидатур". Как было отмечено выше, оцениваемые базовые станции из "Набора соседей" сначала назначаются в "Состояний предварительных кандидатур" (например, "Состояние #1"), а затем переводятся в другие "Состояния предварительных кандидатур" на основе результатов процедуры декорреляции/интегрирования, выполняемой с использованием связанных с ними пилот-сигналов. Посредством прохождения последовательности "Состояний" в "Наборе предварительных кандидатур" каждая базовая станция, вошедшая в "Набор предварительных кандидатур", либо вернется в "Набор соседей" (например, из "Состояний предварительных кандидатур #0"), либо будет назначена в "Набор кандидатур" (например, из "Состояния предварительных кандидатур" #N).
Как показано на фиг. 3, в рассматриваемом варианте в "Активном наборе" содержится один элемент, в "Наборе кандидатур" содержится один элемент, в "Наборе предварительных кандидатур" содержатся два элемента, а в "Наборе соседей" содержится десять элементов. Предпочтительным является следующий порядок поиска пилот-сигналов базовых станций из "Активного набора" (A), "Набора кандидатур" (K), "Набора предварительных кандидатур" (ПКi) и "Набора соседей":
А, К, ПК1, ПК2, N1; А, К, ПК1, ПК2, N2;
А, К, ПК1, ПК2, N10; А, К, ПК1, ПК2, N1; ...
Для каждого окна поиска, ширина которого выражена в элементах ПШ сигнала и которое отцентрировано относительно пилот-сигнала "Набора соседей", принимаемый ПШ пилот-сигнал является декоррелированным с использованием набора локально сформированных "гипотез" ПШ пилот-сигнала. В рассматриваемой системе с МДКР каждой базовой станцией передаются идентичные пилот-сигналы. Однако при передаче каждого сигнала со своим временным сдвигом оказывается возможным различение пилот-сигналов, передаваемых разными базовыми станциями. Как было показано выше, каждая гипотеза пилот-сигнала может быть сформирована путем
(i) сдвига по фазе местного генератора последовательности ПШ пилот-сигнала на временной сдвиг, соответствующий последовательности пилот-сигнала отыскиваемой базовой станции, с тем, чтобы получить ее локально сформированную копию;
(ii) сдвига по фазе локально сформированной копии пилот-сигнала на уникальный временной сдвиг в пределах окна поиска.
На фиг. 4 схематически показано окно поиска шириной W, отцентрированное вокруг предполагаемого времени прихода (TA,i) в мобильную станцию пилот-сигнала с базовой станции Ni из "Набора соседей". Как видно, окно поиска разбито на равные временные интервалы по 1/2 элемента ПШ-сигнала,
каждый из которых соответствует одной из упоминавшихся выше "гипотез" относительно времени прихода конкретного пилот-сигнала, поиск которого осуществляется. На фиг. 4 интенсивности трех многолучевых составляющих (Sm1, Sm2 и Sm3) пилот-сигнала, передаваемого базовой станцией Ni, распределены вдоль горизонтальной оси, характеризующей время прихода сигналов в мобильную станцию в пределах окна поиска:
(TA,i - W/2 < t < TA,i + W/2).
Интенсивности многолучевых составляющих сигнала Si,m1, Si,m2 и Si,m3 получены путем декорреляции/интегрирования энергии принимаемого пилот-сигнала в соответствии с вышеописанной процедурой с использованием гипотез пилот-сигнала H1, H2 и H3.
На фиг. 5A и фиг. 5B представлена блок-схема последовательности операций нового способа поиска пилот-сигнала в соответствии с изобретением. При поиске пилот-сигнала из числа элементов "Набора соседей" окно поиска задается вокруг ожидаемого времени прихода в мобильную станцию отыскиваемого пилот-сигнала из "Набора соседей". Затем на мобильной станции формируется начальная гипотеза относительно пилот-сигнала из "Набора соседей", соответствующая времени прихода пилот-сигнала из "Набора соседей" в начале окна поиска. Начальная гипотеза декоррелируется с принимаемым пилот-сигналом на протяжении первого выбранного числа (например, 100) элементов ПШ-сигнала, а результаты декорреляции интегрируются на протяжении такого же интервала, выраженного в элементах ПШ-сигнала. Результат интегрирования затем сравнивается (шаг 90) с установленным порогом предварительного дампа. Если результат меньше, чем порог предварительного дампа, то гипотеза устанавливается в ноль, и поиск переходит к следующей гипотезе, которая смещена по времени на 1/2 элемента ПШ-сигнала от начальной гипотезы (шаг 95).
Как показано на фиг. 5A и фиг. 5B, если в результате интегрирования предварительного дампа при проверке начальной гипотезы получено значение, превышающее порог предварительного дампа, то на шаге 100 выполняются вторые декорреляция/интегрирование начальной гипотезы с принятым пилот-сигналом на протяжении выбранного числа (например, 412) элементов ПШ-сигнала. Каждая из гипотез, оставшихся в окне поиска и удаленных друг от друга на 1/2 элемента ПШ-сигнала, затем декоррелируются/интегрируются тем же способом, что и начальная гипотеза. При этом в предпочтительном варианте реализации каждая гипотеза декоррелируется на протяжении 100 элементов ПШ-сигнала, интегрируется на протяжении такого же периода, выраженного в элементах ПШ-сигнала, и результаты интегрирования сравниваются с порогом предварительного дампа. Для тех гипотез, для которых величина, полученная при интегрировании "предварительного дампа", превышает порог предварительного дампа, процедура декорреляции/интегрирования продолжается для другого периода в 412 элементов ПШ-сигнала.
Среди гипотез в пределах заданного окна поиска, для которых выполнены вторые декорреляция/интегрирование (т.е. для каждой гипотезы, декоррелированной и интегрированной на протяжении 512 элементов ПШ-сигнала), три результата интегрирования с наибольшими значениями объединяются (шаг 105). Затем объединенный результат сравнивается (шаг 110) с первым порогом для "Набора предварительных кандидатур", и если первый порог для "Набора предварительных кандидатур" будет превышен, то соответствующая базовая станция переводится из "Набора соседей" в первое "Состояние предварительных кандидатур" ("Состояние #1"). В противном случае базовая станция остается в "Наборе соседей".
Как было отмечено выше, в данном примере предполагается, что в "Наборе предварительных кандидатур" имеются две базовые станции (т.е. ПК1 и ПК2). Далее приводится описание процедуры обработки элемента из "Набора предварительных кандидатур", связанного с базовой станцией ПК1. Отметим, что, как только базовая станция ПК1 будет переведена в "Набор кандидатур" или возвращена в "Набор соседей", то тем же самым способом будет произведена обработка пилот-сигнала для базовой станции ПК2.
После того, как базовая станция ПК1 помещена в "Состояние #1", окно поиска "Предварительных кандидатур" устанавливается относительно первой пришедшей пригодной для использования многолучевой составляющей. Как и прежде, многолучевая составляющая считается пригодной для использования, если ее уровень достаточен для ее демодуляции в мобильной станции. Затем в мобильной станции формируется первая гипотеза относительно пилот-сигнала, соответствующая получению пилот-сигнала с базовой станции ПК1 в начале окна поиска "Предварительных кандидатур". В предпочтительном варианте реализации отыскивается степень корреляции этой первой гипотезы с пилот-сигналом, принятым с базовой станции ПК1, на интервале 100 элементов ПШ-сигнала, а затем результаты корреляционного сравнения интегрируются на таком же интервале, выраженном в элементах ПШ-сигнала. После этого результат интегрирования сравнивается (шаг 120) с заданным порогом предварительного дампа. Если результат меньше порога предварительного дампа, то гипотеза устанавливается в ноль, и поиск переходит следующей гипотезе пилот-сигнала ПК1, которая смещена относительно первой гипотезы на 1/2 элементарной ПШ-посылки. В противном случае декорреляция/интегрирование первой гипотезы продолжаются для заранее установленного числа (например, 700) элементарных ПШ-посылок.
Затем каждая из гипотез, смещенных друг относительно друга на 1/2 элементарной ПШ-посылки и оставшихся в окне поиска "Предварительных кандидатур" для базовой станции ПК1, декоррелируется/интегрируется тем же самым способом, что и начальная гипотеза. Среди тех гипотез в пределах окна поиска ПК1, для которых выполнены вторые декорреляция/интегрирование (т.е. для каждой гипотезы, декоррелированной и интегрированной для других 700 элементарных ПШ-отсчетов), три результата интегрирования, имеющих наибольшие значения, объединяются (шаг 125). Объединенный результат затем сравнивается с порогом "Набора предварительных кандидатур" и переводится из "Состояния #1" в "Состояния # 2" "Набора предварительных кандидатур". В противном случае базовая станция ПК1 помещается в "Состояния #0" "Набора предварительных кандидатур" (шаг 130).
В предпочтительном варианте реализации обработка продолжается так же, как было описано в отношении элемента "Набора предварительных кандидатур" в "Состоянии # 1", и после того, как базовая станция ПК1 будет переведена в "Состояние #2" или "Состояние #0". Например, если базовая станция ПК1 помещена в "Состояние #2", то выполняются декорреляция/интегрирование и сравнение полученного результата с порогом предварительного дампа (шаг 120a). После этого выполняются дальнейшие декорреляция/интегрирование и многолучевое объединение (шаг 125a) точно так же, как это было описано на шаге 125. Окончательный объединенный результат интегрирования сравнивается с порогом "Набора предварительных кандидатур" для "Состояния #3", и если порог будет превышен, то базовая станция ПК1 переводится из "Состояния #2" в "Состояние #3" "Набора предварительных кандидатур". В противном случае базовая станция ПК1 возвращается в "Состояние # 1" "Набора предварительных кандидатур" (шаг 130a).
Аналогично, если базовая станция ПК1 переведена из "Состояния #1" в "Состояние #0", то выполняется последовательность этапов 120b, 125b и 130b, аналогичных этапам 120, 125 и 130. На основе результатов выполнения этапов 120b, 125b и 130b базовая станция ПК1 может быть либо опять перемещена в "Состояние #1", либо быть возвращена в "Набор соседей". Базовая станция ПК1 остается в "Наборе предварительных кандидатур" до того, как она будет переведена в "Набор соседей" из "Состояния #0" либо будет переведена в "Набор кандидатур" из "Состояния #3" в результате выполнения этапов 120c, 125c и 130c. После того, как базовая станция ПК1 покинет "Набор предварительных кандидатур", аналогичным образом анализируется пилот-сигнал, поступающий с базовой станции ПК2.
В соответствии с изобретением могут быть установлены различные пороги сравнения и интервалы интегрирования, измеренные в элементарных ПШ-отсчетах, отдельно на этапах 120a, b, c - 130a, b, c в зависимости от условий, в которых осуществляются переходы между "Состояниями" в "Наборе предварительных кандидатур". В общем случае увеличение порога для каждого "Состояния предварительных кандидатур" приводит к увеличению "вероятности правильного обнаружения" того, что базовая станция, переведенная из "Набора предварительных кандидатур" в "Набор кандидатур", будет в состоянии установить связь с мобильной станцией. Аналогично, увеличение длительности интервалов декорреляции/интегрирования между "Состояниями предварительных кандидатур" также будет приводить к возрастанию "вероятности правильного обнаружения", благодаря чему будет снижаться вероятность "ложной тревоги" (т.е. когда вызов передается базовой станции, ошибочно помещенной в "Набор кандидатур"). Можно ожидать, что сокращение этих пороговых уровней и интервалов интегрирования приведет к сокращению вероятности правильного обнаружения базовой станции, но приведет, с другой стороны, к сокращению среднего времени "Установки кандидата" (т.е. среднего времени перехода из "Набора соседей" в "Набор кандидатур" через "Набор предварительных кандидатур").
На фиг. 6 показан пример выполнения приемника мобильной станции 200, в котором может быть использован приемник поиска пилот-сигналов 210 в соответствии с настоящим изобретением. Приемник мобильной станции 200 включает антенну 220, которая подключена к аналоговому приемнику 224. Приемник 224 принимает сигналы радиочастоты, поступающие на антенну 220 и находящиеся обычно в диапазоне 850 МГц, а затем усиливает эти сигналы и переносит на промежуточную частоту. Процедура переноса частоты выполняется с применением синтезатора частоты такого стандарта, который позволяет приемнику 224 настраиваться на любую частоту в диапазоне принимаемых частот общего диапазона сотовой телефонной системы.
Сигнал промежуточной частоты после этого пропускается через полосовой фильтр на поверхностных акустических волнах (ПАВ), который в предпочтительном варианте реализации имеет ширину полосы пропускания около 1,25 МГц. Характеристики фильтра на ПАВ выбираются согласованными с характеристиками сигнала, передаваемого базовой станцией со спектром, расширенным прямой последовательностью, модулированным ПШ-последовательностью, имеющей определенную тактовую частоту, которая в данном случае составляет 1,2288 МГц.
Приемник 224 также содержит аналого-цифровой преобразователь (АЦП) (не показан) для преобразования сигналов ПЧ в цифровой сигнал. Оцифрованный сигнал подается на каждый из трех или более сигнальных процессоров или приемников информации, один из которых является предложенным в изобретении поисковым приемником 210, а остальные являются приемниками информации. На фиг. 6 для наглядности показан один поисковый приемник 210 и два приемника информации 228 и 230.
На фиг. 6 выходной оцифрованный сигнал с приемника 224 подается на приемники цифровой информации 228 и 230 и на поисковый приемник 210. Ясно, что недорогая и достаточно простая мобильная станция может иметь только один приемник информации, а более сложные станции могут иметь два и более, желательно не менее трех, приемников для реализации разнесенного приема.
Оцифрованный сигнал ПЧ может содержать сигналы нескольких входящих вызовов вместе с пилот-сигналами, передаваемыми базовыми станциями, входящими в "Активный набор", "Набор кандидатур", "Набор предварительных кандидатур", "Набор соседей". Приемники 228 и 230 выполняют функцию корреляции выборок ПЧ-сигнала с подходящими ПШ-последовательностями. Эта процедура корреляционной обработки позволяет получить выигрыш при обработке, заключающийся в том, что для сигнала, согласованного с соответствующей ПШ-последовательностью, повышается отношение сигнал/помеха, в то время как для других сигналов такого повышения не происходит. Выходной сигнал коррелятора когерентно детектируется, причем для получения опорной фазы используется смещение ПШ-последовательности пилот-сигнала, используемого при корреляционной обработке. В результате детектирования получают последовательность декодированных информационных символов.
В приемнике мобильной станции 200 используется свойство ПШ-последовательности, заключающееся в возможности различения сигналов многолучевого распространения. Когда сигнал проходит в мобильный приемник 200, пройдя более чем по одному пути, появляются различия во времени приема сигнала. Эти различия во времени приема соответствуют разнице расстояний, поделенной на скорости света. Если эта разница во времени приема превышает длительность одного элемента ПШ-сигнала (т. е. в предпочтительном варианте реализации 0,8138 мкс), то с применением корреляционной обработки можно будет отличать сигнал, прошедший по одному пути, от сигнала, прошедшего по другому. Приемник 200 может выбрать, сопровождать и принимать ему сигнал, пришедший первым, или более поздний сигнал. Если предусмотрены два приемника информации, подобные приемникам 228 и 230, то одновременно могут отслеживаться два сигнала, прошедшие разные пути.
Поисковый приемник 210 под управлением управляющего процессора (т.е. контроллера) 234 осуществляет непрерывное сканирование временной области относительно номинального времени приема пилот-сигнала "Активной" базовой станции (станций), с которой в данный момент поддерживает связь мобильная станция. Как было отмечено выше, многолучевые пилот-сигналы с "Активной" базовой станции (станций) и с других базовых станций: "Кандидатур", "Предварительных кандидатур" и "Соседей", передающих пилот-сигналы, также обнаруживаются и измеряются. Приемник 210 может быть выполнен таким образом, чтобы использовать отношение энергии принимаемого пилот-сигнала на один элемент ПШ-сигнала к общей принимаемой спектральной плотности, шума и сигналов, обозначенное как Ec/10, в качестве оценки интенсивности пилот-сигнала. Приемник 210 выдает в контроллер 234 сигнал с результатами измерения интенсивности сигнала, указывающий на пилот-сигнал и его мощность.
Контроллер 234 выдает сигналы в приемники цифровой информации для того, чтобы каждый из приемников обработал свой, один из двух наиболее мощных сигналов. Приемники 228 и 230 могут обрабатывать многолучевой сигнал одной базовой станции или сигналы от двух разных базовых станций. Выходы приемников 228 и 230 подключены к схеме разнесенной обработки и декодирования (не показана). Схема разнесенной обработки обеспечивает синхронизацию и выравнивание двух потоков, формируемых из принимаемых сигналов, а затем складывает их друг с другом. Эта процедура сложения может быть выполнена на основе умножения каждого из двух потоков на число, соответствующее относительной мощности потоков. Можно считать, что в результате этой операции на выходе схемы разнесенной обработки будет обеспечено максимальное отношение сигнал/шум. Получившийся в результате объединенный поток может быть декодирован и подан в схему цифровой обработки.
На фиг. 7 показана структурная схема поискового приемника 210. На фиг. 7 считается, что входной сигнал 250, поступающий с аналогового приемника 224, имеет квадратурную фазовую манипуляцию (ФМн) и содержит синфазную (I) и квадратную (Q) составляющие. Выборки составляющих I и Q, каждая из которых представляет собой многобитное значение, подаются в схемы восстановления сигнала квадратурной ФМн 260 и 270. В схему восстановления сигнала с квадратурной ФМн 260 поступают также с генератора формирования последовательности ПШ пилот-сигнала последовательности PNI и PNQ ПШ пилот-сигнала. Генератор последовательности ПШ пилот-сигнала 272 в соответствии с синхронизирующей последовательностью и режимом работы, поступающими из контроллера мобильной станции (не показан), формирует последовательности PNI и PNQ ПШ пилот-сигнала, которые идентичны последовательностям, используемым на базовой станции. Схема восстановления сигнала с квадратурной ФМн 260 устраняет ПШ-расширение исходных в составляющих I и Q и выделяет открытые отсчеты составляющих I и Q.
Аналогичным образом входной сигнал 250 с I и Q составляющими подается в схему восстановления сигнала с квадратурной ФМн 270. В схему восстановления сигнала с квадратурной ФМн 270 с генератора формирования последовательности 272 ПШ пилот-сигнала через схему временной задержки 280 поступают также последовательности PNI и PNQ ПШ пилот-сигнала. Схема временной задержки 280 сдвигает вперед по фазе и задерживает последовательности PNI и PNQ ПШ пилот-сигнала. Схема восстановления сигналов с квадратурной ФМн 280 устраняет ПШ-расширение спектра сигналов I и Q и выделяет "открытые", начальные/конечные отсчеты I и Q составляющих. Генератор формирования последовательности 272 ПШ пилот-сигнала получает синхронизирующую информацию с управляющего процессора мобильной станции (не показан), который обеспечивает переход генератора 272 от одной гипотезы к другой в пределах окна поиска.
Процедура поиска начинается с установки смещения генератора 272, соответствующего данной гипотезе, которое сохраняется на протяжении заданного числа элементов ПШ-сигнала. Восстановленные в реальном масштабе времени I и Q составляющие со схемы восстановления 260 подаются на первый набор сумматоров 290 и 292, а "ранний/поздний" восстановленные I и Q отсчеты со схемы восстановления 270 поступают на второй набор сумматоров 296 и 298. Восстановленные I и Q отсчеты в сумматорах 290, 292, 296 и 298 интегрируются на протяжении определенного времени накопления (например, 100 элементов ПШ-сигнала для интегрирования предварительного дампа). Первая пара ключевых схем с фиксацией состояния 302, 304 и вторая пара 306 и 308 таких схем по завершении каждого интервала накопления осуществляют выборку соответственно выходных сигналов первого и второго набора сумматоров 290, 292, 296 и 298.
Как показано на фиг. 7, мультиплексор попеременно пропускает содержимое либо первой, либо второй пары ключевых схем с фиксацией состояния в блок вычисления энергии I2 + Q2 320. Если компаратор 324 определяет, что выходной сигнал блока 320 меньше порога предварительного дампа, установленного управляющим процессором мобильной станции, то управляющий процессор сдвигает вперед по фазе генератор ПШ пилот-сигнала 272 к следующей гипотезе. В предпочтительном варианте реализации запрос на предварительный дамп выдается только в том случае, если уровни энергии как пилот-сигнала реального масштаба времени, так и запаздывающего пилот-сигнала, подаваемые в блок вычисления значения энергии I2 + Q2 320 с первой пары триггеров 302, 304 и со второй пары триггеров 306, 308 соответственно, меньше, чем порог предварительного дампа.
Если компаратор 324 определяет, что порог предварительного дампа превышен, то операция интегрирования, выполняемая сумматорами 290, 292, 296 и 298, продолжается до завершения интервала накопления, заданного контроллером 234. Полученный результат непосредственно по сигнальной линии 334 (показана пунктиром) может быть подан в цифровой компаратор 338 для сравнения с заданным пороговым уровнем энергии (например, пороговым уровнем перехода из одного "Состояния предварительных кандидатур" в другое), выдаваемым управляющим процессором мобильной станции. В другом варианте реализации точность может быть повышена путем объединения энергии от нескольких циклов интегрирования, на каждом из которых используется одна и та же гипотеза относительно пилот-сигнала, а затем сравнения полученного результата с объединенным порогом. Как показано на фиг. 7, это достигается путем накопления в сумматоре 342 энергии от нескольких (например, от 2 до 7) циклов интегрирования. По окончании заданного числа циклов интегрирования суммированный выходной сигнал с сумматора 342 подается на цифровой компаратор 338. После этого результаты сравнения суммированного выходного сигнала с объединенным порогом выдаются в контроллер 234.
Кроме того, в регистре 350 запоминается значение наибольшей суммарной энергии, полученной для наиболее мощной гипотезы в пределах заданного окна поиска. Это максимальное значение, хранящееся в регистре 350, поступает в контроллер 234 для суммирования со значениями энергии, связанными, например, с суммарными значениями, относящимися ко второй и третьей гипотезам в пределах данного окна поиска. Как было показано выше, полученное в результате значение суммарной энергии может быть затем сопоставлено с заданным пороговым уровнем энергии, связанным с переходами от одного "Состояния предварительной кандидатуры" к другому. Ясно, что в этом случае задаваемый порог энергии будет определяться числом циклов интегрирования, выполненных при вычислении значения энергии, хранящегося в сумматоре 342.
Предшествующее описание предпочтительного варианта реализации изобретения позволит любому специалисту воспроизвести или использовать данное изобретение. Специалистам должны быть понятны различные модификации и усовершенствования данной реализации, а основные раскрытые здесь принципы могут быть положены в основу других вариантов реализации без использования дополнительного изобретательства. Таким образом, настоящее изобретение не ограничивается приведенными выше вариантами реализации, но имеет более широкий объем, соответствующий раскрытым в данном описании признакам изобретения.




Изобретение относится к сотовым системам связи, содержащим множество базовых станций. Техническим результатом является то, что заявленные способ и устройство обеспечивают выполнение процедуры поиска пилот-сигнала для осуществления перевода связи мобильной станции между базовыми станциями. Это достигается тем, что мобильная станция формирует перечень пилот-сигналов "Активного набора", передаваемых базовыми станциями, с которыми мобильная станция поддерживает связь, а также перечень пилот-сигналов "Набора соседей" (С), передаваемых базовыми станциями, находящимися в определенной близости данной мобильной станции. Процедура поиска предполагает сравнение измеренных интенсивностей пилот-сигналов, соответствующих записям, связанным с каждой базовой станцией, в "Наборе соседей" (С), с первым заданным уровнем. Одна или несколько записей "Набора соседей" (С), соответствующих базовым станциям, измеренный уровень сигнала которых превышает первый предварительно определенный уровень, могут быть помещены в "Набор предварительных кандидатур" (ПК). Затем уровни пилот-сигналов, связанных с записями в "Наборе предварительных кандидатур" (ПК), оцениваются для определения приемлемости их помещения в "Набор кандидатур" (К), из которого отбираются записи, формирующие "Активный набор". 5 с. и 31 з.п. ф-лы, 7 ил.
| US 5267261 А, 30.11.93 | |||
| US 5177765 А, 05.01.93 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РАДИОТЕЛЕФОННОЙ СВЯЗИ | 1991 |
|
RU2010433C1 |
| US 5293643 А, 08.03.94 | |||
| US 5345598 А, 06.09.94 | |||
| DE 4232294 А1, 31.03.94. | |||

