Изобретение относится к сельскому хозяйству и предназначено для раздачи концентрированных кормов на животноводческих фермах при стойловом содержании крупного рогатого скота.
Известны современные кормораздатчики шведской фирмы Alfa Laval типа "FeedCar Compact" и "Feed Master 800", предназначенные для автоматической раздачи концентрированных кормов на молочных фермах при стойловом содержании коров и содержащие кормовой бункер, подвешенный на несущей конструкции и передвигающийся по монорельсу, привод бункера, электронный блок управления и шнековый дозатор (см. приложение - иллюстрация из каталога фирмы Alfa Laval). Обе системы позволяют осуществлять дробное кормление животных до 8 раз в день, что увеличивает надои молока, уменьшает отходы кормов, улучшает физиологическое состояние животных.
Однако такие системы малопригодны для использования на существующих фермах, так как они требуют усиления несущих конструкций для обеспечения возможности перемещения тяжелого (до 1 т) бункера по монорельсу. Кроме того, кормораздатчики бункерного типа снабжены автономной системой питания от мощных аккумуляторов, что требует дополнительных мероприятий для их подзарядки и технического обслуживания. Необходимо также указать, что дозирование и раздача кормов производится последовательно, отсутствует возможность одновременной выдачи корма всему поголовью коров, поэтому не исключена вероятность возникновения стрессовых ситуаций в процессе кормления, которые приводят к ухудшению физиологического состояния животных и к снижению продуктивности. Эти особенности раздатчиков бункерного типа делают невозможным их использование в отечественных коровниках без больших капитальных затрат и нежелательным с точки зрения физиологического комфорта животных.
Известны устройства для раздачи кормов, в которых предусмотрена одновременная выдача кормов всем животным в ряду стойл, например, по а.с. СССР 1431719, 1987 г., 1821106, 1991 г. и по патенту РФ 2034453, 1991 г. В этих устройствах для перемещения корма от загрузочного бункера к кормушкам используются транспортеры: ленточные, как в раздатчике по а.с. 1431719, или состоящие из нескольких платформ, связанных гибкой тягой, как в устройстве по а.с. 1821106, или состоящие из множества сцепленных друг с другом раздаточных тележек, установленных на рельсовом пути, как в устройстве по пат. РФ 2034453. Разгрузка ленточного транспортера производится путем перегиба ленты над кормушкой, в устройстве по пат. РФ 2034453 для этой цели предусмотрены эластичные гофрированные перегородки, закрепленные между смежными тележками. Все эти устройства характеризуются большой металлоемкостью, сложностью конструкции и не гарантируют малых потерь при высыпании кормов в кормушки.
Известна отечественная разработка кормораздатчика по а.с. СССР 1323060, 1985 г., в которой предусмотрены тяга с емкостями для корма, установленными на направляющей, единое устройство для разгрузки емкостей, снабженное параллельным тяге тросом и приводом троса в виде противовеса, а также связанным с тросом поворотным рычажным стопором, шарнирно закрепленным на направляющей с возможностью взаимодействия с одной из емкостей, снабженной упором. С тросом связаны рычаги, посредством которых открывают днища емкостей над индивидуальными кормушками. Устройство довольно простое по конструкции, но наличие дополнительной тяги, противовеса и множества подвижных упоров снижает его эксплуатационную надежность.
Наиболее близкой к заявляемой конструкции является конструкция раздатчика кормов по а.с. СССР 1166756, 1982 г., содержащая бункер с порционным дозатором, электронный блок управления процессом загрузки и выгрузки кормов, контейнеры по количеству животных в ряду стойл, замкнутую гибкую тягу с механизмом привода и непрерывную направляющую, параллельную гибкой тяге. Устройство подвеса контейнеров включает опорный рычаг, установленный с возможностью горизонтального перемещения по направляющей с помощью роликов. Опорный рычаг шарнирно прикреплен нижней частью к контейнеру, выполненному в виде совка, при этом рычаг закреплен на оси, не совпадающей с осью, на которой находится центр тяжести контейнера. Для обеспечения выгрузки корма внутри полого опорного рычага размещен гибкий тросик, соединенный одним концом с тягой, а другим - с контейнером посредством скобы, шарнирно прикрепленной к середине дна контейнера с возможностью поворота в вертикальной плоскости относительно оси закрепления рычага.
Особенности работы известного раздатчика кормов состоят в следующем.
При включении механизма привода гибкой тяги контейнеры перемещаются по направляющей. При прохождении контейнера под бункером специальная втулка, установленная на каждом рычаге, включает дозатор, который выдает порцию корма, причем порции одинаковы для всех контейнеров и регулируются с помощью реле времени. Корм засыпается в углубленную часть контейнера. После загрузки последнего контейнера установленный на его рычаге упор взаимодействует с концевым выключателем, благодаря чему механизм привода переключается на обратный ход. Гибкая тяга, двигаясь в обратную сторону, натягивает тросики, а контейнеры по инерции продолжают двигаться в первом направлении. При натяжении тросики подтягиваются вверх и концы скобы поворачивают контейнер вокруг оси закрепления, опрокидывают его, и корм высыпается в кормушку. Разгрузка всех контейнеров происходит одновременно. После выгрузки корма другое реле времени в блоке управления переключает механизм привода на первоначальное направление движения, контейнеры возвращаются в исходное положение и направляются на повторную загрузку. Для данного устройства характерны малая металлоемкость и возможность одновременной выгрузки кормов всем животным. Однако конструкция подвеса контейнеров в виде длинного рычага с шарнирными опорами предопределяет его неустойчивость, а наличие подвижных тросиковых тяг для опрокидывания контейнеров снижает эксплуатационную надежность всего устройства.
В основу настоящего изобретения положена задача создания раздатчика кормов, который имел бы простую конструкцию при низкой металлоемкости и обладал бы высокой надежностью и стабильностью работы, обеспечивая при этом одновременную выгрузку кормов.
Поставленная задача решается тем, что в раздатчик кормов, содержащий бункер с порционным дозатором, электронный блок управления процессом загрузки и выгрузки кормов, замкнутую гибкую тягу с механизмом привода, связанные с гибкой тягой контейнера по количеству животных в ряду стойл, непрерывную направляющую, установленную параллельно гибкой тяге, устройства подвеса контейнеров, включающие опорный рычаг, установленный с возможностью перемещения по направляющей с помощью роликов, и устройства опрокидывания контейнеров, согласно изобретению, введены последовательно установленные несущие рамы, закрепленные на опорных стойках фермы и представляющие собой каждая жесткую прямоугольную конструкцию, в которой верхняя и нижняя горизонтальные части соединены короткими перемычками, и направляющая закреплена на верхней части несущих рам. Опорный рычаг каждого устройства подвеса контейнера выполнен Т-образным, горизонтальная часть которого установлена с помощью роликов на направляющей, а на нижнем конце вертикальной части рычага размещен ролик, упирающийся в боковую поверхность нижней части несущей рамы с возможностью горизонтального перемещения вдоль указанной поверхности, на вертикальной части рычага перпендикулярно его оси закреплен стержень, на котором шарнирно установлен контейнер, центр тяжести которого расположен ниже оси закрепления, а боковые стенки параллельны направляющей. Каждое устройство опрокидывания контейнера закреплено на нижней части несущей рамы над приемной воронкой кормушки и выполнено в виде пластины, один конец которой изогнут под прямым углом, а другой - под острым, и ответного упора, закрепленного в нижней части боковой стенки контейнера со стороны рычага.
Кроме того, в раздатчик кормов могут быть введены мерный бункер с поворотным днищем, плоские боковые стенки которого параллельны направляющей и закреплены шарнирно на корпусе бункера, и устройство разгрузки мерного бункера, включающее упор, закрепленный на правом плече горизонтальной части опорного рычага контейнера, два вертикальных рычага, верхние концы которых закреплены шарнирно на корпусе мерного бункера, а нижние концы соединены шарнирно с горизонтальным рычагом по принципу пантографа, при этом на боковой стенке поворотного днища, обращенной к системе рычагов, установлен дополнительный упор.
Раздатчик кормов, выполненный в соответствии с настоящим изобретением, характеризуется простотой конструкции и изготовления как отдельных узлов, так и устройства в целом, низкой металлоемкостью при изготовлении и монтаже на несущих конструкциях фермы, малой энергоемкостью при загрузке и перемещении контейнеров и одновременной выгрузкой кормов в кормушки. При этом устройство обеспечивает надежную и стабильную работу и исключает потери корма в течение всего цикла загрузки, перемещения и выгрузки его в кормушки.
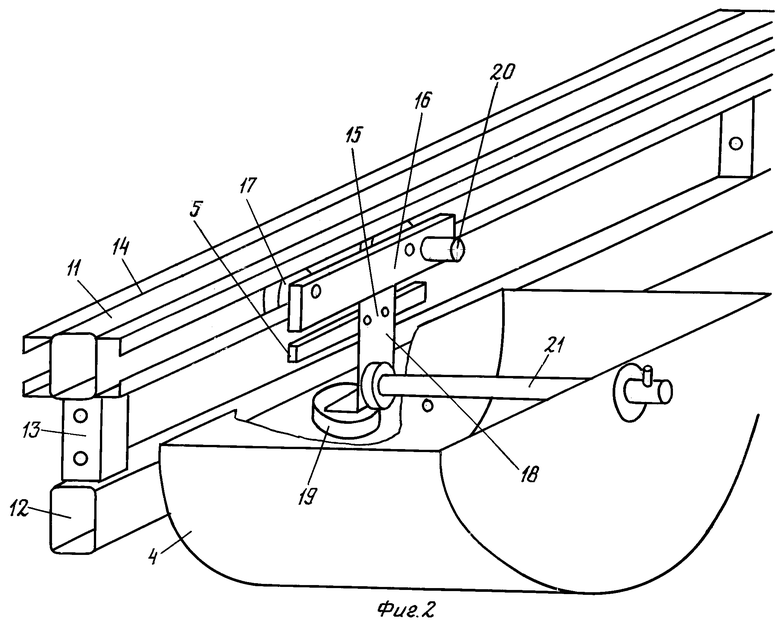
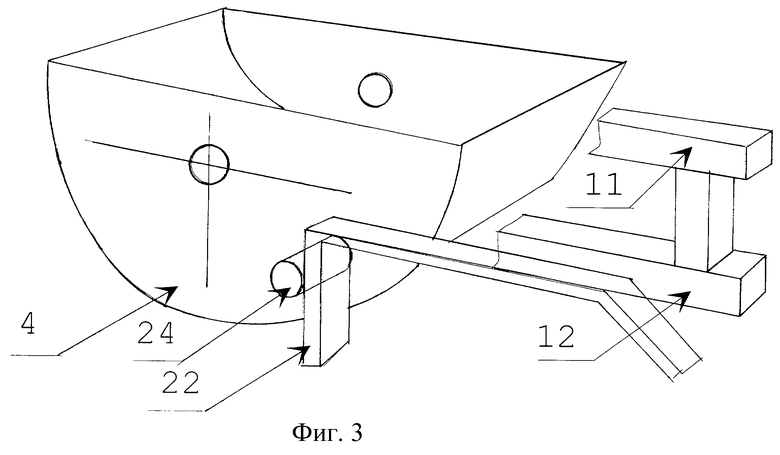
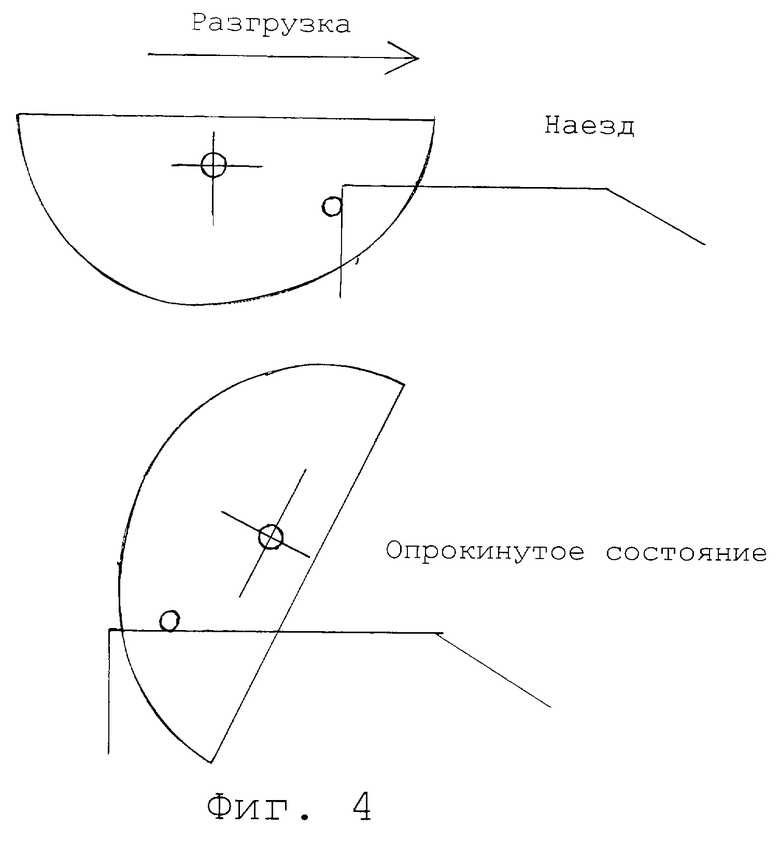
В дальнейшем изобретение поясняется описанием конкретного примера его осуществления и прилагаемыми чертежами, на которых, согласно изобретению, фиг. 1 представляет схематически общий вид раздатчика кормов, на фиг.2 дано аксонометрическое изображение устройства подвеса контейнера, на фиг.3 представлено устройство опрокидывателя, на фиг.4 схематически представлено положение контейнера в момент опрокидывания, на фиг.5 изображен в аксонометрии мерный бункер с устройством разгрузки.
Раздатчик кормов, согласно изобретению, содержит бункер 1 с порционным дозатором, установленный на опорах 2 в начале ряда стойл, электронный блок 3 управления процессом загрузки и выгрузки кормов, контейнеры 4 по количеству животных в ряду стойл, замкнутую гибкую тягу 5 в виде цепной передачи с механизмом 6 привода и звездочками 7 и 8 в начале и в конце ряда стойл. Каждый контейнер 4 жестко скреплен с конкретным звеном цепи (тяги 5).
Изначально контейнеры 4 размещены на двух ветвях тяги 5 в шахматном порядке для равномерного распределения нагрузки на несущую конструкцию. Между опорными стойками 9 фермы закреплены несущие рамы 10, представляющие собой каждая жесткую прямоугольную конструкцию, в которой верхняя горизонтальная часть 11 и нижняя горизонтальная часть 12 соединены короткими перемычками 13. На верхних частях 11 рам 10 установлены прямая и обратная ветви непрерывной направляющей 14 С-образного профиля.
Подвес каждого контейнера 4 выполнен в виде Т-образного опорного рычага 15, горизонтальная часть 16 которого установлена с помощью роликов 17 на направляющей 14, а нижний конец вертикальной части 18 рычага 15 соединен с роликом 19, который упирается в боковую поверхность нижней части 12 несущей рамы 10 с возможностью горизонтального перемещения вдоль указанной поверхности. На правом плече горизонтальной части 16 рычага 15 закреплен упор 20. На вертикальной части 18 рычага 15 перпендикулярно ей жестко закреплен стержень 21. На стержне 21 шарнирно установлен контейнер 4 так, что центр его тяжести расположен на оси 0'-0" ниже оси стержня 21, а плоские боковые стенки контейнера 4 параллельны направляющей 14.
Устройство опрокидывания контейнера 4 выполнено в виде пластины 22, закрепленной на нижней части 12 несущей рамы 10 над приемной воронкой 23 кормушки. Один конец пластины 22 отогнут под прямым углом, а другой - под острым. На нижней части боковой стенки контейнера 4 со стороны опорного рычага 15 закреплен стержень 24, который является ответным упором.
Под бункером 1 с порционным дозатором размещен дополнительный мерный бункер 25 с поворотным днищем 26, ось 27 шарнирного закрепления которого перпендикулярна направляющей 14, а плоские боковые стенки 28 параллельны указанной направляющей 14. Устройство разгрузки мерного бункера 25 выполнено в виде системы рычагов и содержит два вертикальных рычага 29 и 30 и один горизонтальный рычаг 31, соединенные по принципу пантографа: верхние концы рычагов 28 и 29 шарнирно закреплены на корпусе бункера 25, а нижние связаны шарнирно с горизонтальным рычагом 31. Ответный упор 32 закреплен на боковой стенке 28 поворотного днища 26, обращенной к системе рычагов 29, 30, 31, и находится возле рычага 30.
Раздатчик кормов работает следующим образом.
Корм подается в бункер 1 из накопительного бункера (не показан), находящегося вне помещения фермы. В исходном положении контейнеры 4, жестко связанные с гибкой тягой 5, размещены каждый вблизи конкретной приемной воронки 23 на некотором небольшом расстоянии от пластины 22 со стороны ее остроугольного отгиба. Включением механизма 6 привода гибкая тяга 5 приводится в движение и увлекает контейнеры 4 в сторону бункера 1 на загрузку. Одновременно электронный блок 3 управления включает бункер 1 с порционным дозатором, и в мерный бункер 25 засыпается доза корма для первого контейнера 4. При приближении контейнера 4 упор 20, установленный на правом плече горизонтальной части 16 рычага 15, надвигается на горизонтальный рычаг 31 и перемещает его в направлении своего движения. Рычаг 30 сдвигает упор 32, закрепленный на стенке 28 поворотного днища, и тем самым открывает высыпное отверстие бункера 25. Упором 20 горизонтальный рычаг 31 удерживается в приподнятом состоянии в течение времени, которое определяется длиной рычага 31 и скоростью движения контейнера 4. По окончании контакта упора 20 с поверхностью рычага 31 система рычагов возвращается в исходное состояние и поворотное днище 26 закрывает высыпное отверстие бункера 25. После загрузки первого контейнера 4 включается бункер 1 и дозируется корм для следующего контейнера. Процесс загрузки продолжается при непрерывном движении контейнеров 4, пока не заполнится последний из них. При движении контейнеров 4 в направлении загрузки пластина 22 не препятствует их перемещению, так как стержень 24 проскальзывает по ней со стороны остроугольного отгиба. Когда контейнеры 4 достигнут исходного состояния, движение тяги 5 прекращается. Для разгрузки контейнеров 4 блок 3 управления включает механизм 6 привода в реверсивном направлении и контейнеры 4 перемещаются в сторону пластины 22. При этом стержень 24, закрепленный на боковой стенке контейнера 4, упирается в прямоугольный отгиб пластины 22 и вынуждает контейнер 4 повернуться вокруг оси закрепления и опрокинуться над воронкой 23. Все контейнеры опрокидываются и высыпают корм в воронки одновременно. Затем блок 3 управления включает механизм 6 привода гибкой тяги 5 в направлении загрузки, и контейнеры 4 под действием собственного веса возвращаются в исходное состояние. На этом цикл раздачи корма закончен.
Таким образом, заявляемое устройство имеет весьма простую конструкцию, для изготовления и монтажа которой не требуется больших затрат металла. Благодаря исключению множества подвижных соединений обеспечена высокая надежность работы раздатчика корма при малой энергоемкости всего цикла загрузки и разгрузки.
Опытный образец раздатчика кормов был изготовлен и испытан в САОЗТ "Племенной завод Приневское" Ленинградской обл. Испытания подтвердили надежность и стабильность работы устройства в реальных условиях существующей молочной фермы. В настоящее время опытный образец подвергается государственным испытаниям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи кормов | 1981 |
|
SU954073A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| Раздатчик кормов | 1982 |
|
SU1166756A1 |
| РАЗДАТЧИК КОРМОВ | 2006 |
|
RU2333636C2 |
| РАЗДАТЧИК КОРМОВ | 1992 |
|
RU2081567C1 |
| Раздатчик кормов | 1975 |
|
SU587914A1 |
| РАЗДАТЧИК РУЛОНИРОВАННОГО КОРМА | 2009 |
|
RU2412589C1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ РАЗДАТЧИК КОРМОВ | 1999 |
|
RU2165692C2 |
| Кормораздатчик | 1983 |
|
SU1114385A1 |
| Устройство для кормления телят | 1981 |
|
SU1014548A2 |

Изобретение относится к сельскому хозяйству и предназначено для раздачи концентрированных кормов на животноводческих фермах при стойловом содержании коров. Раздатчик кормов содержит бункер с порционным дозатором, установленный на опорах в начале ряда стойл, электронный блок управления процессом загрузки и выгрузки кормов, контейнеры (К) по количеству животных в ряду стойл, замкнутую гибкую тягу с механизмом привода. Между опорными стойками фермы закреплены несущие рамы (НР), на верхних частях HP установлена непрерывная направляющая (Н). Подвес каждого контейнера выполнен в виде Т-образного опорного рычага, горизонтальная часть которого установлена с помощью роликов на Н, а нижний конец вертикальной части рычага связан с роликом, который упирается в боковую поверхность нижней части HP с возможностью горизонтального перемещения вдоль указанной поверхности. На вертикальной части рычага закреплен стержень, на котором шарнирно установлен К. Устройство опрокидывания К выполнено в виде пластины, закрепленной на нижней части рамы над приемной воронкой кормушки, и стержня, закрепленного на боковой стенке К со стороны рычага. Один конец пластины отогнут под прямым углом, а другой - под острым. В раздатчик кормов могут быть введены дополнительный мерный бункер с поворотным днищем и средство разгрузки, которое выполнено в виде системы двух вертикальных рычагов и одного горизонтального рычага, соединенных по принципу пантографа. Ответный упор закреплен на боковой стенке днища, обращенной к системе рычагов. Изобретение позволяет упростить конструкцию и обеспечить надежную и стабильную работу раздатчика кормов. 1 з.п. ф-лы, 5 ил.
| Раздатчик кормов | 1982 |
|
SU1166756A1 |
| Раздатчик кормов | 1979 |
|
SU801825A1 |
| Раздатчик кормов | 1973 |
|
SU543373A1 |
| УСТРОЙСТВО ДЛЯ КОРМЛЕНИЯ ЖИВОТНЫХ НА ФЕРМЕ | 1991 |
|
RU2034453C1 |
| Способ раздачи кормов | 1986 |
|
SU1431719A1 |
| СОМИНИЧ Н.Г | |||
| Механизация животноводческих ферм | |||
| - М.-Л.: Сельхозгиз, 1957 | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |

